Ultralytics YOLO11 ile küçük nesne tespitini keşfetme
Ultralytics YOLO11'in gözetim ve robotik gibi gerçek dünya uygulamalarında nasıl hızlı ve doğru küçük nesne tespiti sağladığını keşfet.

Görüntüleme yapay zekası ile entegre dronlar, yerden yüzlerce metre yukarıda uçabilir ve yine de video akışlarında sadece birkaç piksel olarak görünen bir kişiyi tespit etmeleri beklenebilir. Aslında bu, sistemlerin bir görüntü içindeki çok küçük nesneleri tanımlaması gereken robotik, gözetim ve uzaktan algılama gibi uygulamalarda yaygın bir zorluktur.
Ancak geleneksel nesne tespiti modelleri bunu yapmakta zorlanabilir. Görüntüler ve videolardaki küçük nesneler çok sınırlı görsel bilgiyi temsil eder. Basitçe ifade etmek gerekirse, bir model onlara baktığında, öğrenilecek veya tanınacak pek fazla detay yoktur.
Perde arkasında bu modeller genellikle evrişimli sinir ağı (CNN) tabanlı bir mimariye dayanır. Görüntüler ağın katmanlarından geçirilir ve ham pikseller yerine ilgili desenleri vurgulayan özellik haritalarına veya basitleştirilmiş temsilcilere dönüştürülür.
Görüntü ağın derinliklerine ilerledikçe, bu özellik haritaları küçülür. Bu, hesaplamayı hızlandırır ancak aynı zamanda ince detayların kaybolabileceği anlamına gelir.
Çok küçük nesneler için bu detaylar çok önemlidir. Bu detaylar kaybolduğunda, bir görüntüleme yapay zekası modeli nesneyi tespit etmekte zorlanabilir, bu da daha az doğru veya tutarsız sınırlayıcı kutulara (bounding boxes) yol açabilir.
Gerçek zamanlı uçtan uca görüntüleme yapay zeka sistemleri bunu daha da zorlaştırır. Yüksek çözünürlüklü görüntüler detayı korumaya yardımcı olur ancak çıkarımı yavaşlatır ve daha fazla GPU gücü gerektirir. Düşük çözünürlükler daha hızlı çalışır ancak küçük nesnelerin tespiti daha da zorlaşır.
Hız, doğruluk ve donanım sınırları arasında sürekli bir dengeleme eylemi haline gelir. Son teknolojik gelişmeler sayesinde, Ultralytics YOLO11 ve yakında çıkacak olan Ultralytics YOLO26 gibi görüntüleme yapay zekası modelleri, bu ödünleşimi daha etkili bir şekilde yönetmek için tasarlanmıştır.

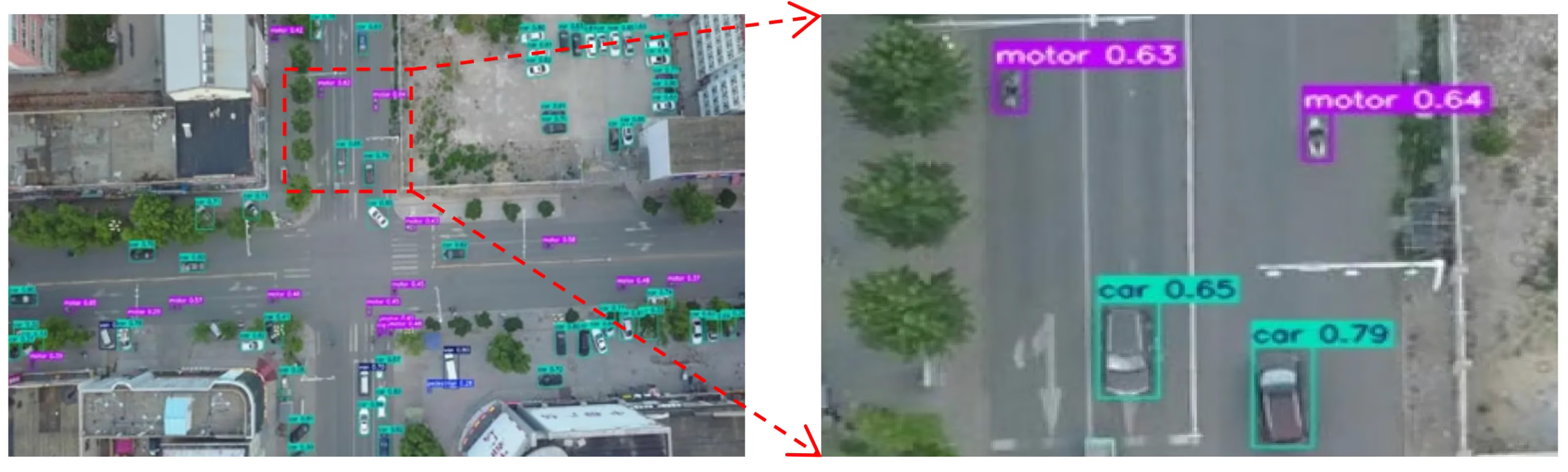
Şekil 1. Hava görüntülerindeki küçük nesneleri tespit etmek için YOLO11 kullanımı (Kaynak)
Bu makalede, küçük nesne tespitinin neden zor olduğunu ve YOLO11'in bunu nasıl kolaylaştırabileceğini keşfedeceğiz. Başlayalım!
Link to this sectionKüçük nesne tespiti nedir ve neden önemlidir?#
Küçük nesne tespiti, yapay zekanın bir dalı olan görüntüleme yapay zekasında, bir görüntünün çok küçük bir kısmını kaplayan nesneleri tanımlamaya ve konumlandırmaya odaklanan bir görevdir. Bu nesneler görüntü içinde genellikle, dijital bir görüntünün en küçük birimi olan sınırlı sayıda pikselle temsil edilir. Bu durum onları, daha büyük ve daha net hedeflerden (genellikle daha fazla piksel içeren) tespit etmeyi daha zor hale getirir.
Örneğin, hava görüntülerindeki araçlar, bir fabrika zeminindeki aletler veya geniş açılı gözetim kameraları tarafından yakalanan insanlar, görüntü içinde küçük nesneler olarak görünebilir. Onları tespit etmek önemlidir çünkü genellikle kritik bilgiler taşırlar ve gözetim gibi birçok gerçek dünya uygulaması, düzgün çalışmak için bu tespitlere güvenir.
Küçük nesneler kaçırıldığında, sistem performansı ve karar verme süreçleri etkilenebilir. İnsansız hava aracı (UAV) izleme, yerdeki küçük hareketli bir nesneyi kaçırmanın navigasyon veya izleme doğruluğunu etkileyebileceği iyi bir örnektir.
Link to this sectionKüçük nesnelerin tespitiyle ilgili zorluklar#
Eski sistemler, yoğun veya değişken sahnelerde sorun yaşayan el yapımı özellikler ve geleneksel görüntüleme yapay zekası yöntemleri kullanıyordu. Bugün bile, derin öğrenme modelleri çok daha iyi performans gösterse de, küçük hedefler görüntünün sadece küçük bir kısmını kapladığında tespit etmek hala zordur.
Sırada, küçük nesneleri tespit ederken farklı gerçek dünya senaryolarında ortaya çıkan yaygın zorluklardan bazılarına bakalım.
Link to this sectionBoyut, pikseller ve bilgi kaybı#
Küçük nesneler çok az piksel içerir, bu da bir modelin özellik çıkarımı gibi aşamalarda öğrenebileceği görsel detay miktarını sınırlar. Sonuç olarak, kenarlar, şekiller ve dokular gibi desenlerin tespiti zorlaşır, bu da küçük nesnelerin arka plana karışma olasılığını artırır.
Görüntüler bir sinir ağının evrişimli katmanlarından geçerken, piksellerdeki görsel bilgiler kademeli olarak özellik haritalarına sıkıştırılır. Bu, modelin verimli kalmasına yardımcı olur ancak aynı zamanda ince detayların kaybolması anlamına da gelir.
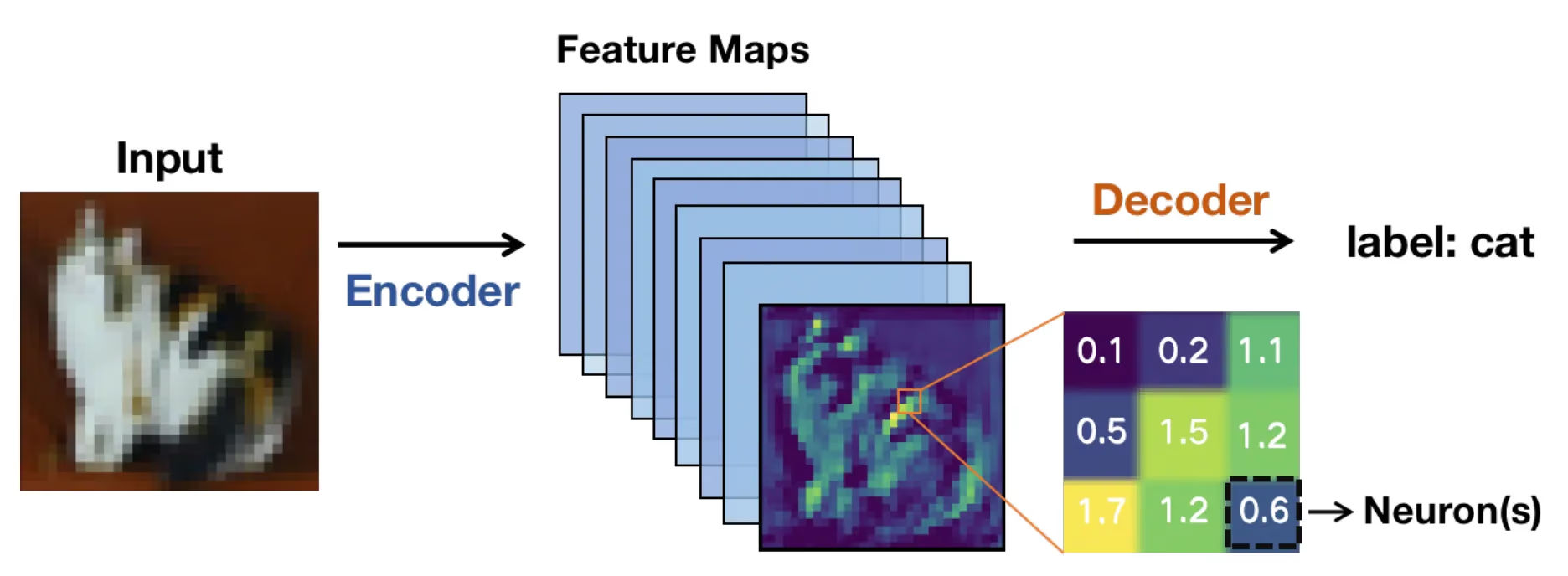
Şekil 2. Özellik haritaları görüntüdeki görsel desenleri temsil eder (Kaynak)
Küçük hedefler için, önemli ipuçları tespit ağı harekete geçme şansı bulamadan kaybolabilir. Bu olduğunda, yerelleştirme daha az güvenilir hale gelir ve sınırlayıcı kutular kayabilir, üst üste binebilir veya hedef nesneleri tamamen ıskalayabilir.
Link to this sectionTıkanma, ölçek farkı ve bağlam#
Boyutla ilgili zorluklar genellikle tıkanma (occlusion) ile de ortaya çıkar. Tıkanma, nesneler, özellikle de daha küçük olanlar, sahnedeki diğer nesneler tarafından kısmen gizlendiğinde meydana gelir.
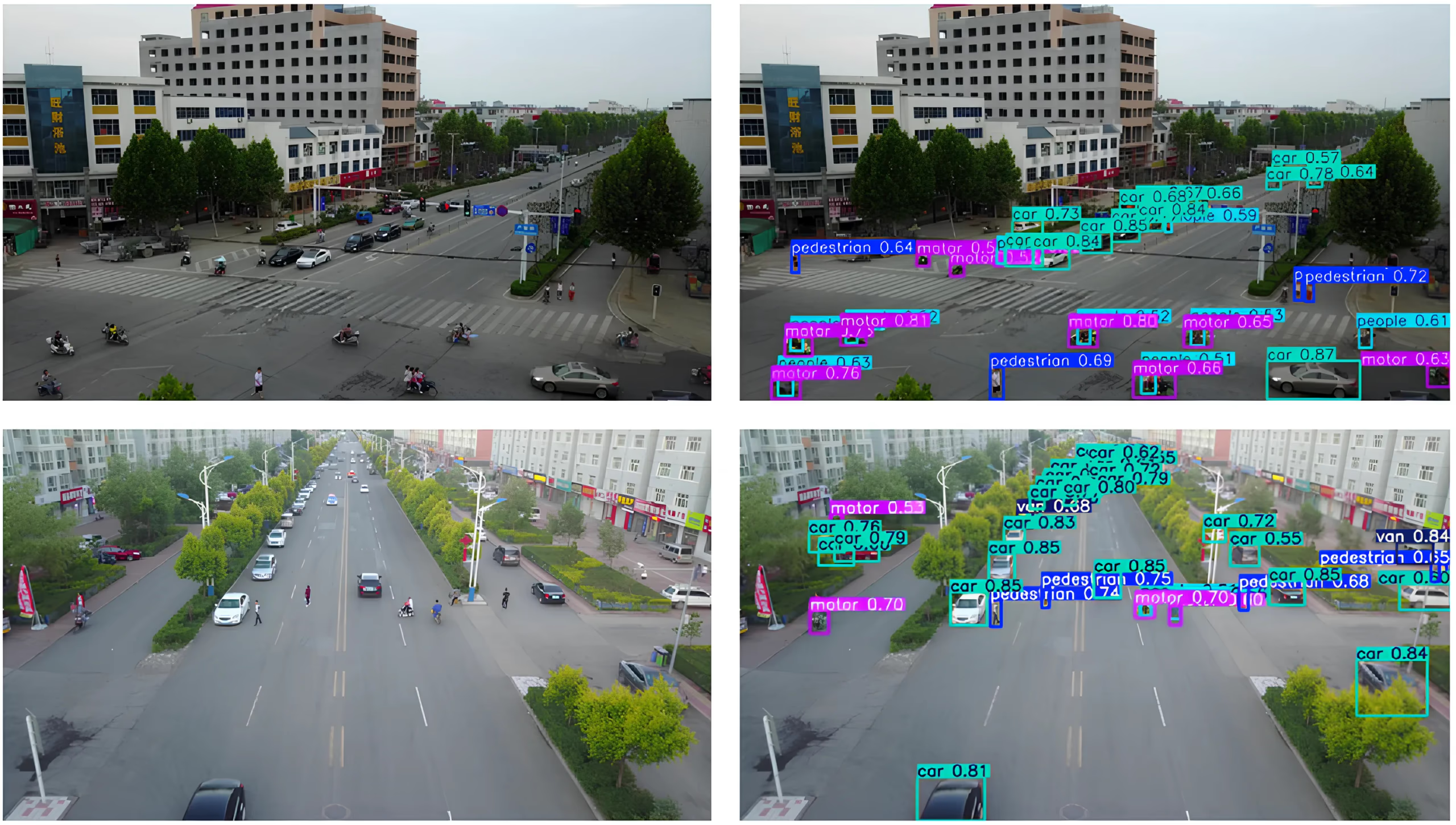
Bu, hedefin görünür alanını azaltır ve bu da nesne dedektörü için mevcut bilgiyi sınırlar. Küçük bir tıkanma bile, özellikle düşük çözünürlüklü girişle birleştiğinde, tespit ağlarını şaşırtabilir. Bunun ilginç bir örneği, yayaların, bisikletlerin veya araçların binalar, ağaçlar veya diğer hareketli nesneler tarafından kısmen engellenebildiği VisDrone gibi UAV veri setlerinde görülebilir.
Şekil 3. VisDrone veri setinden küçük nesneleri gösteren bir örnek (Kaynak)
Benzer şekilde, ölçek farkı, aynı nesnenin mesafe ve kamera konumuna bağlı olarak çok küçük veya nispeten büyük görünmesi durumunda başka bir zorluk katmanı ekler. Bu engellere rağmen, tespit algoritmaları bu küçük nesneleri doğruluk kaybı olmadan farklı ölçeklerde tanımalıdır.
Bağlam da tespitte önemli bir rol oynar. Örneğin, büyük nesneler genellikle yardımcı görsel ipuçları sağlayan net çevrelerle görünür. Öte yandan, küçük hedefler genellikle bu bağlamsal bilgiden yoksundur, bu da desen tanımayı zorlaştırır.
Link to this sectionKüçük nesne tespitinde gizli metrik sorunu#
Intersection over Union (IoU) gibi yaygın değerlendirme metrikleri, tahmin edilen bir sınırlayıcı kutunun gerçek kutuyla ne kadar iyi örtüştüğünü ölçer. IoU daha büyük nesneler için iyi çalışsa da, küçük nesneler için davranışı oldukça farklıdır.
Küçük nesneler sadece birkaç piksel kaplar, bu nedenle tahmin edilen kutudaki küçük bir kayma bile büyük bir orantısal hata yaratabilir ve IoU puanını keskin bir şekilde düşürebilir. Bu, küçük nesnelerin, nesne görüntüde görünür olsa bile, bir tahmini doğru olarak saymak için kullanılan standart IoU eşiğini karşılayamaması anlamına gelir.
Sonuç olarak, yerelleştirme hatalarının yanlış pozitif veya yanlış negatif olarak sınıflandırılma olasılığı daha yüksektir. Bu sınırlamalar araştırmacıları, nesne tespit sistemlerinin küçük, tespit edilmesi zor hedefleri nasıl değerlendirdiğini ve ele aldığını yeniden düşünmeye sevk etmiştir.
Link to this sectionÇok ölçekli özellikler: Gerçek zamanlı küçük nesne tespitinin anahtarı#
Araştırmacılar küçük nesne tespitini iyileştirmek için çalışırken, görsel bilgiyi birden fazla ölçekte korumanın ve temsil etmenin gerekli olduğu netleşti. Bu içgörü, son arXiv araştırmalarında ve IEEE Uluslararası Konferansları ve Avrupa Bilgisayarlı Görme Derneği (ECCV) gibi mekanlarda sunulan makalelerde yankılanmaktadır.
Görüntüler bir sinir ağında derinleştikçe, küçük nesneler detay kaybedebilir veya tamamen kaybolabilir, bu yüzden YOLO11 gibi modern görüntüleme yapay zekası modelleri daha iyi özellik çıkarımına güçlü bir şekilde odaklanır. Şimdi, onları daha iyi anlamak için özellik haritaları ve özellik piramidi ağlarının arkasındaki temel kavramları gözden geçirelim.
Link to this sectionÖzellik haritaları ve ölçek temsili#
Uzaktan algılama görüntüsü gibi bir giriş görüntüsü bir sinir ağına girdiğinde, kademeli olarak özellik haritalarına dönüştürülür. Bunlar, kenarlar, şekiller ve dokular gibi görsel desenleri vurgulayan görüntünün basitleştirilmiş temsilleridir.
Ağ derinleştikçe, bu özellik haritaları uzamsal boyutta küçülür. Bu küçülme, modelin verimli çalışmasına ve üst düzey bilgilere odaklanmasına yardımcı olur. Ancak, küçülen ve derin özellik haritaları uzamsal detayı da azaltır.
Şekil 4. Özellik çıkarımı küçük nesne tespiti için anahtardır. (Kaynak)
Büyük nesneler doğru tespit için yeterli görsel bilgiyi korurken, küçük hedefler sadece birkaç ağ katmanından sonra kritik detayları kaybedebilir. Bu olduğunda, bir model küçük bir nesnenin var olduğunu bile tanımakta zorlanabilir. Bu, derin nesne tespit modellerinde küçük nesnelerin kaçırılmasının temel nedenlerinden biridir.
Link to this sectionÖzellik piramidi ağları ve çok ölçekli öğrenme#
Genellikle FPN olarak adlandırılan Özellik piramidi ağları, uzamsal detay kaybını gidermek için tanıtılmıştır ve modellerin küçük nesneleri daha etkili bir şekilde tespit edebilmesi için birden fazla katmandan gelen bilgileri birleştiren destekleyici bir modül olarak çalışırlar. Bu süreç, özellik toplama (feature aggregation) ve özellik birleştirme (feature fusion) olarak da bilinir.
Sığ katmanlar ince uzamsal detaylar sağlarken, daha derin katmanlar anlamsal bağlam ekleyerek etkili çok ölçekli özellik öğrenmesini mümkün kılar. Özellik haritalarını sadece büyüten naif yukarı örneklemenin (upsampling) aksine, FPN anlamlı bilgileri korur ve küçük nesne tespitini iyileştirir.
Modern yaklaşımlar, küçük hedeflerin tespitini daha da artırmak için uyarlanabilir özellik birleştirme ve bağlam farkındalığına sahip tasarımlar kullanarak bu fikir üzerine inşa edilmiştir. Başka bir deyişle, FPN modellerin hem büyük resmi hem de küçük detayları aynı anda görmesine yardımcı olur. Bu optimizasyon, nesneler küçük olduğunda gereklidir.
Link to this sectionNesne tespit modelleri küçük nesneleri ele almak için nasıl evrimleşti#
İşte nesne tespit modellerinin, çok küçük olanlar da dahil olmak üzere farklı boyutlardaki nesneleri daha iyi tespit etmek için zaman içinde nasıl evrimleştiğine ve ilerlediğine dair kısa bir bakış:
- Erken tespit yöntemleri: Erken nesne tespit yaklaşımları, manuel olarak tasarlanmış özelliklere ve klasik görüntü işlemeye dayalı kural tabanlı algoritmalara dayanıyordu. Bu özellikler sabit olduğundan, performans farklı görüntülerle düştü.
- Makine öğrenimi ve derin öğrenmenin tanıtılması: Makine öğrenimi ve derin öğrenmenin benimsenmesi, nesne tespiti araştırmalarında büyük bir değişime işaret etti. Önceden tanımlanmış kurallara güvenmek yerine, sinir ağları görsel temsilleri doğrudan eğitim verilerinden öğrendi, bu da değişen nesne boyutlarında ve sahnelerde uyarlanabilirliği artırdı.
- Evrişimli ağlar: Bu sinir ağları, görüntülerdeki desenleri görmeyi öğrenir. Her katman, basit kenarlar ve renklerle başlayıp, ardından şekiller ve sonunda tam nesnelerle farklı detayları yakalar, bu da onları modern görüntüleme yapay zekası için vazgeçilmez kılar.
- İki aşamalı nesne dedektörleri: Girshick ve Ren tarafından tanıtılan Faster R-CNN gibi iki aşamalı dedektörler, önce aday bölgeler oluşturdu ve ardından bunları sınıflandırdı. Bu yaklaşım küçük nesneler için doğruluğu artırdı ancak hesaplama maliyetini artırdı ve gerçek zamanlı performansı düşürdü.
- Tek aşamalı nesne dedektörleri: SSD (Single-Shot Detector) ve YOLOv3, Ultralytics YOLOv5 ve daha sonra Ultralytics YOLOv8 dahil olmak üzere YOLO (You Only Look Once) ailesi gibi tek aşamalı dedektörler, tespiti tek bir geçişte gerçekleştirir. Bu tasarım, rekabetçi doğruluğu korurken çıkarım hızını önemli ölçüde artırır.
- En son teknoloji modeller: Yeni nesne tespit modelleri gerçek zamanlı performansa ve uç (edge) dağıtıma daha fazla odaklanır. Ultralytics YOLO11 ve yakında çıkacak olan Ultralytics YOLO26 gibi yeni Ultralytics YOLO model sürümleri, yüksek doğruluğu düşük gecikmeli çıkarımla dengelemek için tasarlanmıştır, bu da onları sınırlı bilgi işlem gücüne sahip cihazlarda küçük hedefler dahil tüm boyutlardaki nesneleri tespit etmek için çok uygun hale getirir.
Link to this sectionKüçük nesne tespiti kullanım durumları için YOLO11 kullanımı#
Artık küçük nesne tespitinin nasıl çalıştığına dair daha iyi bir anlayışa sahip olduğumuza göre, YOLO11'in uygulanabileceği birkaç gerçek dünya uygulamasına bakalım.
Link to this sectionUAV ve hava görüntüleme#
Yoğun bir şehir caddesinin çok üzerinde uçan bir dron hayal edin. O yükseklikten arabalar, bisikletler ve hatta insanlar bir ekranda sadece birkaç piksele küçülür.
UAV ve hava görüntüleme modülleri genellikle, ilgi nesnelerinin küçük olduğu ve karmaşık arka planlarla çevrili olduğu, bu da onları görüntüleme yapay zekası modelleri için tespit edilmesi zor hale getiren sahneleri yakalar.
Bu tür senaryolarda YOLO11 ideal bir model seçimi olabilir. Örneğin, YOLO11 gibi bir modelle donatılmış bir dron, trafiği gerçek zamanlı olarak izleyebilir, her nesne görüntünün sadece küçük bir kısmını kaplasa bile sahne boyunca hareket eden araçları, bisikletlileri ve yayaları tespit edebilir. Bu, trafik yönetimi, kamu güvenliği veya şehir planlaması gibi uygulamalarda daha hızlı karar vermeyi ve daha doğru içgörüleri mümkün kılar.
Link to this sectionRobotik ve otomasyon#
Robotlar genellikle doğruluğun ve zamanlamanın kritik olduğu ortamlarda kullanılır. Depolar, fabrikalar ve çiftlikler gibi ortamlarda bir robot, bir montaj hattındaki bir parça, bir paket üzerindeki bir etiket veya bir tarladaki küçük bir bitki tomurcuğu gibi çok küçük nesneleri tanımalı ve hızlı bir şekilde yanıt vermelidir.
Bu boyuttaki nesneleri tespit etmek, özellikle kamera akışında sadece birkaç piksel olarak göründüklerinde veya diğer nesneler tarafından kısmen tıkandıklarında karmaşık olabilir. Bu küçük detayları kaçırmak otomasyonu yavaşlatabilir veya robotun bir görevi tamamlama yeteneğini etkileyebilir.
YOLO11 bu durumlarda fark yaratabilir. İyileştirilmiş özellik çıkarımı ve hızlı çıkarımı, robotların küçük nesneleri gerçek zamanlı olarak tespit etmesini ve hemen harekete geçmesini sağlar.
YOLO11 ayrıca, robotların yalnızca genel sınırlayıcı kutuları konumlandırmak yerine nesne sınırlarını ve kavrama noktalarını daha hassas bir şekilde anlamasına yardımcı olabilecek örnek segmentasyonu (instance segmentation) destekler. Örneğin, YOLO11 ile entegre bir robot kolu, bir konveyör bandındaki küçük bileşenleri tespit edebilir, tam şekillerini segmentlere ayırabilir ve ulaşamayacakları bir yere gitmeden önce onları alabilir, bu da sistemin verimli ve güvenilir kalmasına yardımcı olur.
Link to this sectionYOLO11'i küçük nesne tespiti için etkili kılan nedir#
Günümüzde mevcut olan pek çok görüntüleme yapay zekası modeliyle, Ultralytics YOLO11'i öne çıkaran şeyin ne olduğunu merak ediyor olabilirsiniz.
Ultralytics YOLO11'in küçük nesnelerin tespit edilmesi gereken uygulamalar için harika bir seçenek olmasının birkaç nedeni şunlardır:
- Daha iyi özellik çıkarımı: YOLO11, daha hassas nesne tespiti sağlayan özellik çıkarımını geliştirmek için iyileştirilmiş bir omurga ve boyun mimarisi kullanır.
- Ekosistem ve kullanım kolaylığı: Ultralytics Python paketi, YOLO11 gibi modelleri yüklemek, eğitmek, doğrulamak ve dağıtmak için yerleşik işlevler sağlayan bir kütüphanedir. Bu iş akışları sadece birkaç satır kod gerektirdiğinden, ekipler küçük nesne tespiti için hızla deney yapabilir ve modelleri ince ayarlarla iyileştirebilir.
- Uç dağıtım için optimize edilmiştir: YOLO11, NVIDIA Jetson, Raspberry Pi ve endüstriyel kamera sistemleri gibi uç cihazlarda verimli bir şekilde çalışabilir. Basitçe ifade etmek gerekirse, gerçek zamanlı görüntüleme yapay zekası görevlerini doğrudan cihaz üzerinde mümkün kılar.
Link to this sectionYOLO11 ile küçük nesneleri tespit ederken kullanılabilecek pratik stratejiler#
YOLO11 gibi bir model kullanmanın yanı sıra, açıklamalarınızı hazırlama şekliniz, genel veri seti ve model eğitim prosedürü tespit performansında önemli bir fark yaratabilir.
İşte odaklanmanız gerekenlerin kısa bir özeti:
- Doğru veri artırma: Ölçeklendirme veya kırpma gibi hafif veri artırma, modelin yeni görüntülere genelleme yapmasına yardımcı olabilir. Ancak, agresif büyük ölçekli artırma, küçük nesneleri bozabilir veya kaldırabilir, bu da modelin onları öğrenmesini zorlaştırır.
- Hata durumlarına bakmak: Modelin nesneleri nerede ıskaladığını veya yanlış tanımladığını analiz etmek, bir temel oluşturmaya ve sorunların veri setinden mi, özellik çıkarımı sırasında bilginin kaybolmasından mı kaynaklandığını veya eğitim ayarlarını düzeltmek gerekip gerekmediğini ortaya çıkarmaya yardımcı olur.
- Veri seti bileşimi: Veri setiniz, modelin anlamlı desenleri öğrenebilmesi için yeterli miktarda küçük nesne örneği içermeli ve eğitim sırasında daha büyük nesnelerin daha küçük olanları gölgede bırakmaması için dengeli kalmalıdır.
Link to this sectionÖne çıkanlar#
Küçük nesne tespiti zordur çünkü görüntüler bir görüntüleme yapay zekası modelinden geçerken küçük hedefler detay kaybeder. YOLO11, bu detayların nasıl korunduğunu iyileştirerek, gerçek zamanlı performanstan ödün vermeden küçük nesne tespitini daha güvenilir hale getirir. Bu denge, YOLO11'in gerçek dünya uygulamalarında doğru ve verimli tespiti desteklemesini sağlar.
Büyüyen topluluğumuza katıl! AI hakkında daha fazla bilgi edinmek için GitHub depomuzu keşfet. Perakendede bilgisayarlı görü ve otomotiv endüstrisinde AI gibi inovasyonları çözüm sayfalarımızı ziyaret ederek keşfet. Bilgisayarlı görü ile bugün inşa etmeye başlamak için lisanslama seçeneklerimize göz at.






