Ultralytics YOLO26 neden NMS'yi kaldırıyor ve bu dağıtımı nasıl değiştiriyor
Ultralytics YOLO26'nın gerçek uçtan uca, NMS-free çıkarımı nasıl sağladığını ve işleme sonrası (post-processing) adımlarının kaldırılmasının dışa aktarımı ve uç dağıtımını neden basitleştirdiğini keşfet.
14 Ocak'ta en yeni bilgisayarlı görü modellerimizin nesli olan Ultralytics YOLO26'yı kullanıma sunduk. YOLO26 ile amacımız sadece doğruluğu veya hızı iyileştirmek değil, nesne algılama modellerinin gerçek dünya sistemlerinde nasıl oluşturulduğunu ve dağıtıldığını yeniden düşünmekti.
Bilgisayarlı görü araştırmadan üretime geçtikçe, modellerin CPU'lar, uç cihazlar, kameralar, robotlar ve gömülü donanımlar üzerinde çalışması giderek daha fazla bekleniyor. Bu ortamlarda güvenilirlik, düşük gecikme süresi ve dağıtım kolaylığı en az performans kadar önemlidir.
YOLO26, çıkarım hattındaki gereksiz karmaşıklığı ortadan kaldıran modern ve uçtan uca bir mimari kullanarak bu gerçeklik göz önünde bulundurularak tasarlandı. YOLO26'da yapılan en önemli yeniliklerden biri, yaygın olarak NMS olarak bilinen Non-Maximum Suppression yönteminin kaldırılmasıdır.
Yıllardır NMS, nesne algılama sistemlerinin standart bir parçası olmuş ve yinelenen algılamaları temizlemek için bir işlem sonrası adımı olarak kullanılmıştır. Etkili olsa da, özellikle uç donanımlarda fazladan hesaplama yükü ve dağıtım zorlukları da getirmiştir.
YOLO26 ile farklı bir yaklaşım benimsedik. Tahminlerin nasıl üretildiğini ve eğitildiğini yeniden düşünerek, gerçek uçtan uca, NMS içermeyen çıkarımı mümkün kılıyoruz. Model, harici temizleme adımlarına veya el yapımı kurallara güvenmeden nihai algılamaları doğrudan üretir. Bu durum YOLO26'yı daha hızlı, dışa aktarılması daha kolay ve çok çeşitli donanım platformlarında dağıtılması daha güvenilir hale getirir.
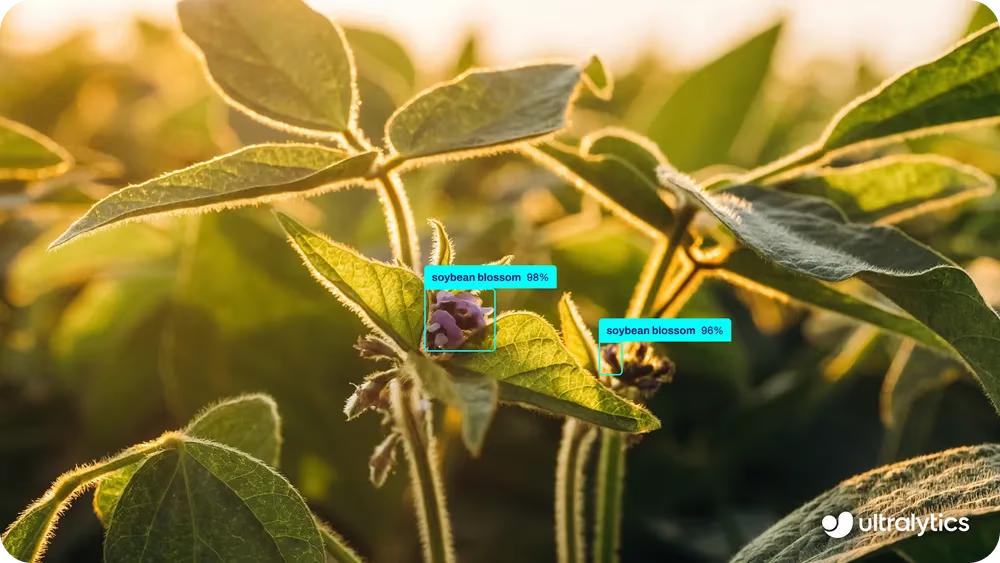
Şekil 1. Ultralytics YOLO26 kullanarak görüntüdeki nesneleri algılama.
Bu makalede, geleneksel nesne algılamanın neden NMS'e güvendiğine, nasıl bir dağıtım darboğazı haline geldiğine ve YOLO26'nın geçici çözümlere olan ihtiyacı nasıl ortadan kaldırdığına daha yakından bakacağız. Hadi başlayalım!
Link to this sectionGeleneksel nesne algılama, mükerrer algılamalar üretir#
NMS'in ne olduğuna ve YOLO26'da neden kaldırdığımıza girmeden önce, bir adım geri çekilip geleneksel nesne algılama modellerinin tahminlerini nasıl oluşturduğuna bakalım.
Geleneksel nesne algılama modelleri genellikle aynı nesne için birden fazla örtüşen sınırlayıcı kutu (bounding box) üretir. Bu kutuların her biri, görüntüdeki aynı nesneye işaret etmelerine rağmen kendi güven puanına sahiptir.
Bu durum birkaç nedenden dolayı gerçekleşir. Birincisi, model tahminleri birçok uzamsal konumda ve farklı ölçeklerde aynı anda yapar. Bu, modelin farklı boyutlardaki nesneleri algılamasına yardımcı olur, ancak aynı zamanda yakındaki konumların hepsinin aynı nesneyi bağımsız olarak tanımlayabileceği anlamına gelir.
İkincisi, birçok nesne algılama sistemi, her konumun etrafında çok sayıda aday kutu oluşturan çapa tabanlı (anchor-based) yaklaşımlar kullanır. Bu, nesneleri doğru bir şekilde bulma şansını artırsa da, örtüşen tahminlerin sayısını da artırır.
Son olarak, ızgara tabanlı algılamanın kendisi doğal olarak fazlalığa yol açar. Bir nesne birden fazla ızgara hücresinin sınırına yakın durduğunda, birkaç hücre o nesne için bir kutu tahmin edebilir ve bu da birden fazla örtüşen algılamaya neden olur.
Bu nedenle, modelin ham çıktısı genellikle tek bir nesne için birkaç kutu içerir. Sonuçları kullanılabilir hale getirmek için, bu gereksiz tahminlerin filtrelenmesi gerekir, böylece yalnızca bir nihai algılama kalır.
Link to this sectionNon-Maximum Suppression yöntemini anlamak#
Bir nesne algılama modeli aynı nesne için birden fazla örtüşen sınırlayıcı kutu ürettiğinde, bu sonuçların kullanılmadan önce temizlenmesi gerekir. Non-Maximum Suppression burada uygulanır.
Non-Maximum Suppression, model tahminlerini yapmayı bitirdikten sonra çalışan bir işlem sonrası adımıdır. Amacı, yinelenen algılamaları azaltarak her nesnenin tek bir nihai sınırlayıcı kutu ile temsil edilmesini sağlamaktır.
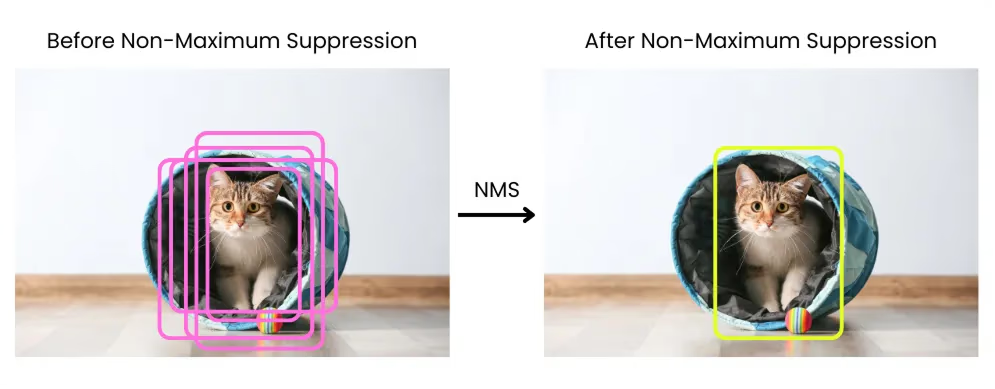
Şekil 2. NMS'e genel bir bakış. Görsel yazar tarafından hazırlanmıştır.
İşlem, sınırlayıcı kutuları güven puanlarına ve ne kadar örtüştüklerine göre karşılaştırarak çalışır. Güven puanı çok düşük olan tahminler ilk önce kaldırılır.
Kalan kutular daha sonra güven puanına göre sıralanır ve en yüksek puana sahip kutu en iyi algılama olarak seçilir. Seçilen bu kutu diğer kutularla karşılaştırılır.
Eğer başka bir kutu bununla çok fazla örtüşüyorsa, o kutu bastırılır ve kaldırılır. Örtüşme genellikle iki kutunun paylaştığı alan ile her ikisinin kapladığı toplam alan arasındaki oranı hesaplayan bir metrik olan Intersection over Union kullanılarak ölçülür. Bu işlem, yalnızca en güvenilir, örtüşmeyen algılamalar kalana kadar tekrarlanır.
Link to this sectionNMS neden dağıtımı karmaşıklaştırır?#
Non-Maximum Suppression, yinelenen algılamaları filtrelemeye yardımcı olsa da, modeller araştırmadan gerçek dünya dağıtımına geçtiğinde daha belirgin hale gelen zorlukları da beraberinde getirir.
En büyük sorunlardan biri performanstır. NMS, çıkarımdan sonra çalışır ve hangilerinin tutulacağına karar vermek için sınırlayıcı kutuların birbirleriyle karşılaştırılmasını gerektirir.
Bu işlem hesaplama açısından maliyetlidir ve verimli bir şekilde paralelleştirilmesi zordur. Uç cihazlarda ve CPU tabanlı sistemlerde, bu fazladan iş fark edilir gecikmelere yol açarak gerçek zamanlı gereksinimlerin karşılanmasını zorlaştırabilir.
NMS ayrıca dağıtım karmaşıklığını da artırır. Modelin bir parçası olmadığı için, ayrı bir işlem sonrası kodu olarak uygulanması gerekir.
Farklı çalışma zamanları ve platformlar NMS'i farklı şekillerde ele alır; bu da genellikle her hedef ortam için özel uygulamaların sürdürülmesi gerektiği anlamına gelir. Bir kurulumda işe yarayan şey diğerinde biraz farklı davranabilir, bu da dağıtımı daha kırılgan ve ölçeklendirilmesini daha zor hale getirir.
Donanım optimizasyonu bir diğer zorluktur. NMS, sinir ağı işlemlerini verimli bir şekilde çalıştırmak için tasarlanmış özel AI hızlandırıcılarına düzgün bir şekilde eşlenmez. Sonuç olarak, model optimize edilmiş donanımda hızlı çalışsa bile, NMS genel performansı sınırlayan bir darboğaz haline gelebilir.
Bu faktörlere ek olarak, NMS güven eşikleri ve örtüşme eşikleri gibi manuel olarak seçilen parametrelere dayanır. Bu ayarlar sonuçları önemli ölçüde etkileyebilir ve genellikle farklı veri kümeleri, uygulamalar veya donanımlar için ayarlanmaları gerekir. Bu, üretim sistemlerinde davranışın daha az tahmin edilebilir olmasına yol açar ve fazladan yapılandırma yükü ekler.
Link to this sectionUçtan uca nesne algılama çıkarımı açıklandı#
Non-Maximum Suppression'ın sınırlamaları, bizi nesne algılama modellerinin çıkarım zamanında nasıl davranması gerektiğini yeniden düşünmeye itti. Birçok örtüşen tahmin oluşturup sonrasında bunları temizlemek yerine, daha temel bir soru sorduk.
Ya model nihai algılamaları doğrudan üretebilseydi? Bu soru, uçtan uca nesne algılama çıkarımının merkezinde yer alır. Uçtan uca bir sistemde model, harici temizleme adımlarına güvenmeden, algılama sürecinin tamamını baştan sona yönetecek şekilde eğitilir.
Birçok aday kutu üretip bunları çıkarımdan sonra filtrelemek yerine, model küçük bir güvenilir, örtüşmeyen tahmin kümesini kendi başına oluşturmayı öğrenir. Mükerrer algılamalar, işlem sonrası ile kaldırılmak yerine ağın içinde çözülür.
Daha yeni model mimarileri, bu yaklaşımın hem mümkün hem de pratik olduğunu gösterdi. Doğru eğitim stratejisiyle modeller, her nesneyi birçok rakip tahmin yerine tek bir tahminle ilişkilendirmeyi öğrenerek fazlalığı kaynağında azaltabilir.
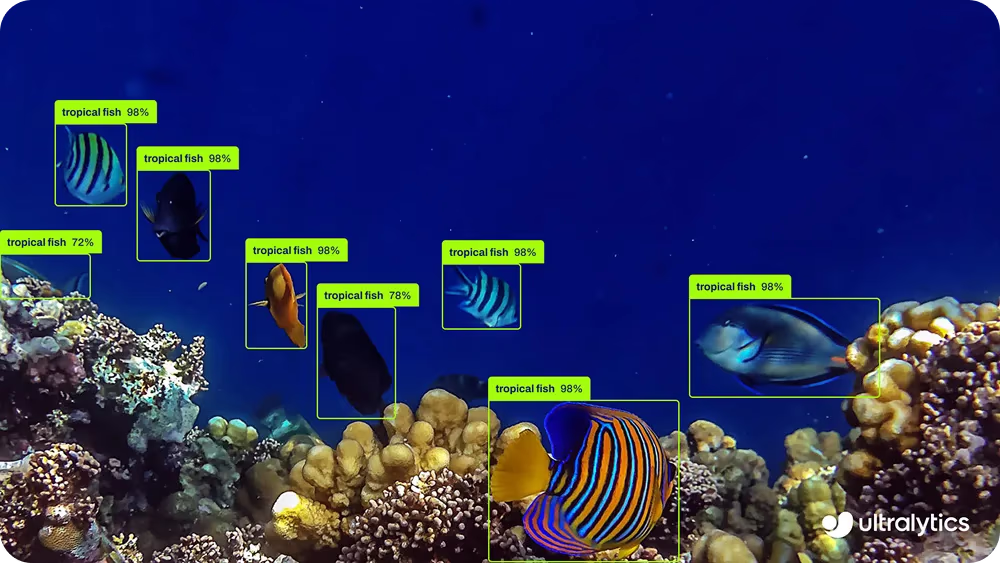
Şekil 3. Ultralytics YOLO26 kullanarak nesneleri algılama örneği.
Bunun işe yaraması için eğitimin de değişmesi gerekir. Model, birçok tahminin aynı nesne için rekabet etmesine izin vermek yerine, daha az ve daha güvenilir algılamalar üreterek net bir karar vermeyi öğrenir.
Genel sonuç daha basit bir çıkarım hattıdır. Mükerrer kopyalar zaten dahili olarak çözüldüğünden, çıkarım zamanında Non-Maximum Suppression'a gerek yoktur. Model çıktısı zaten nihai algılama kümesidir.
Bu uçtan uca tasarım, dağıtımı da kolaylaştırır. İşlem sonrası adımlar veya platforma özgü NMS uygulamaları olmadan, dışa aktarılan model tamamen kendi kendine yeterlidir ve farklı çıkarım çerçeveleri ile donanım hedefleri arasında tutarlı bir şekilde davranır.
Lider Ortaklık Mühendisimiz Francesco Mattioli'nin açıkladığı gibi, “Gerçek uçtan uca öğrenme, modelin piksellerden tahminlere kadar her şeyi, türevlenebilirliği bozan ve dağıtımı zorlaştıran el yapımı işlem sonrası adımları olmadan ele alması gerektiği anlamına gelir.”
Link to this sectionUltralytics YOLO26, NMS'i nasıl kaldırıyor?#
YOLO26, bunları temizlemek için işlem sonrasına güvenmek yerine, algılamaların nasıl öğrenildiğini ve üretildiğini değiştirerek Non-Maximum Suppression'ı kaldırır. Birçok tahminin aynı nesne için rekabet etmesine izin vermek yerine, YOLO26 nesneler ve çıktılar arasında net bir birebir ilişki kurmayı öğrenecek şekilde eğitilir.
Bu, modelin birçok örtüşen aday yerine her nesne için tek bir güvenilir tahmin üretmeye odaklanmasına yardımcı olan öğrenilebilir sorgu tabanlı algılama ile kısmen mümkün kılınmıştır. Her nesne bir tahminle ilişkilendirilir ve bu da mükerrer algılamaları doğal olarak azaltır.
Bu davranış, eğitim sırasında tutarlı eşleştirme stratejileri ile pekiştirilir ve modeli örtüşen tahminler üretmek yerine her nesne için bir güvenilir karar vermeye teşvik eder. Sonuçta model daha az tahmin üretir, ancak her biri nihai bir algılamayı temsil eder.
Link to this sectionDFL'i kaldırmak NMS'siz algılamayı nasıl mümkün kıldı?#
YOLO26'da NMS'siz çıkarımı mümkün kılan bir diğer önemli yenilik, Distribution Focal Loss veya DFL'in kaldırılmasıdır. Önceki YOLO modellerinde DFL, tek bir değer yerine olası kutu konumlarının bir dağılımını tahmin ederek sınırlayıcı kutu regresyonunu iyileştirmek için kullanılıyordu.
Bu yaklaşım yerelleştirme doğruluğunu artırsa da, algılama hattına karmaşıklık da ekledi. Bu karmaşıklık, gerçek uçtan uca çıkarıma doğru ilerlerken bir sınırlama haline geldi.
DFL, ek hesaplama ve sabit regresyon aralıkları getirdi; bu da modelin temiz, birebir nesne atamalarını öğrenmesini zorlaştırdı ve Non-Maximum Suppression gibi işlem sonrası adımlara olan güveni artırdı. YOLO26 ile DFL'i kaldırdık ve sınırlayıcı kutu regresyonunu daha basit ve daha doğrudan olacak şekilde yeniden tasarladık.
Dağıtım tabanlı çıktılara güvenmek yerine model, daha az ve daha güvenilir algılamaları destekleyecek şekilde doğru kutu koordinatlarını tahmin etmeyi öğrenir. Bu değişiklik, örtüşen tahminlerin kaynağında azaltılmasına yardımcı olur ve sınırlayıcı kutu regresyonunu YOLO26'nın uçtan uca, NMS'siz tasarımıyla uyumlu hale getirir.
Link to this sectionUltralytics YOLO26 NMS'sizdir ve dağıtımı kolaydır#
NMS'siz bir tasarım, YOLO26'yı gerçekten uçtan uca bir model haline getirir. Bunun modelleri dışa aktarma üzerinde önemli bir etkisi vardır.
Dışa aktarma, eğitilmiş bir modeli ONNX, TensorRT, CoreML veya OpenVINO gibi eğitim ortamının dışında çalışabilecek bir formata dönüştürmek anlamına gelir. Geleneksel hatlarda bu süreç, Non-Maximum Suppression modelin kendi parçası olmadığı için genellikle bozulur.
YOLO26, NMS'i kaldırarak bu sorundan tamamen kaçınır. Dışa aktarılan model, nihai algılamaları üretmek için gereken her şeyi zaten içerir.
Bu, dışa aktarılan modeli tamamen kendi kendine yeterli hale getirir ve çıkarım çerçeveleri ile donanım hedefleri arasında daha taşınabilir kılar. Aynı model; sunucularda, yalnızca CPU kullanılan sistemlerde, gömülü cihazlarda veya uç hızlandırıcılarda dağıtıldığında tutarlı bir şekilde davranır. Dağıtım daha kolay hale gelir çünkü dışa aktardığınız şey, tam olarak çalıştırdığınız şeydir.
Bu basitlik özellikle uç uygulamalar için önemlidir. Örneğin YOLO26, karmaşık işlem sonrası hatların pratik olmadığı ekin izleme, saha denetimi ve bitki sağlığı analizi gibi kullanım durumları için dronlar gibi cihazlarda kolayca dağıtılabilir. Model nihai algılamaları doğrudan çıkardığı için, fazladan işlem adımları olmadan hafif donanımlarda güvenilir bir şekilde çalışır.

Şekil 4. Ultralytics YOLO26'nın dron gibi uç cihazlarda dağıtılması kolaydır.
Özetle, NMS'siz çıkarım, dışa aktarma ve dağıtımdaki sürtünmeyi ortadan kaldırır ve daha temiz, daha güvenilir görü sistemleri sağlar. NMS bir geçici çözümdü. YOLO26 artık geçici çözümlere ihtiyaç duymuyor.
Link to this sectionÖne çıkanlar#
YOLO26, mükerrer algılamaları sonradan temizlemek yerine temel sorunu çözerek Non-Maximum Suppression'ı kaldırır. Uçtan uca tasarımı, modelin nihai algılamaları doğrudan üretmesini sağlayarak dışa aktarma ve dağıtımı farklı donanımlarda daha basit ve tutarlı hale getirir. NMS önceki sistemler için yararlı bir geçici çözümdü, ancak YOLO26'nın artık buna ihtiyacı yok.
Topluluğumuza katılın ve AI hakkında daha fazla bilgi edinmek için GitHub depomuza göz atın. Tarımda AI ve perakendede bilgisayarlı görü hakkındaki çözüm sayfalarımızı keşfedin. Lisanslama seçeneklerimizi keşfedin ve bugün vizyon AI ile çalışmaya başlayın!






