利用视觉 AI 增强球体轨迹预测
了解视觉 AI 如何改进球体轨迹预测,并为体育、机器人技术和其他智能应用提供实时洞察。

当你最喜欢的篮球运动员投篮时,你通常能判断出球是会进筐还是投失。作为人类,你之所以能做出这种预测,是因为你可能看过各种篮球比赛,并且知道会发生什么。现在,想象一下一台通过摄像头观看篮球比赛的机器,它试图弄清楚球是否会进筐。
这要复杂得多。复制我们通过经验形成的视觉智能并不像听起来那么简单。事实上,球类轨迹预测是一个引人入胜的研究领域,它探索机器如何分析运动、旋转和角度,从而预测球的落点。

图 1. 篮球投篮轨迹。(来源)
早在 1537 年,意大利数学家尼科洛·塔塔利亚(Niccolò Tartaglia)就发现,炮弹以 45 度角发射时飞行距离最远。他的发现为我们今天理解运动和预测奠定了基础。
现在,随着计算机科学和人工智能(AI)的进步,机器可以准确且实时地预测球的轨迹。通过分析球的位置、速度、旋转和角度等细节,AI 系统可以预测球的落点。这有助于从运动员训练和表现分析到医疗保健和机器人技术等各种应用。
特别是 计算机视觉 这一 AI 领域,它能帮助机器解析和理解周围世界的视觉信息。这正是系统能够通过摄像头或视频识别物体、跟踪运动轨迹并理解所见内容的关键所在。
当应用于球类轨迹预测时,像 Ultralytics YOLO11 和 Ultralytics YOLO26 这样的计算机视觉模型可以帮助系统逐帧检测和跟踪球。这些视觉数据提供了球在每一帧中位置的准确信息,随后可用于估算其随时间变化的速度和方向。AI 模型和各种算法可以利用这些数据来预测球的下一个位置。
在本文中,我们将探讨球类轨迹预测、所涉及的各种方法以及计算机视觉的作用。让我们开始吧!
Link to this section球类轨迹预测的重要性#
除了作为一个有趣的研究领域外,球类轨迹预测还在推动跨多个领域的实用且具影响力的技术发展。例如,在自动驾驶汽车中,轨迹预测使汽车能够预判其他车辆、骑行者和行人的未来路径。通过预测这些移动物体在接下来的几秒钟内可能出现的位置,自动驾驶系统可以通过调整速度、变道或提前避免潜在碰撞,从而做出更安全、更高效的决策。
同样,在机器人技术中,球类轨迹预测使机器能够高精度地检测、跟踪并响应移动物体。这对于需要在实时环境下处理快速移动物体的自动化系统(例如工业机器人或送货无人机)特别有用。
Link to this section球类轨迹预测的工作原理概述#
那么,预测球的轨迹到底是如何工作的呢?这取决于所使用的方法。总的来说,每种方法的目标都是一样的:理解球目前的运动状态并预测它接下来的去向。
以下是所使用的几种不同方法的一瞥:
- 基于物理的建模: 这种方法利用运动定律和空气动力学来计算速度、发射角、重力和空气阻力等因素如何影响球的飞行路径。
- 机器学习 模型: 这些模型分析大量运动数据以学习球的运动模式,从而能够在不依赖明确物理方程的情况下做出准确预测。
- 基于计算机视觉的预测: 这种方法使用视频片段逐帧检测和跟踪球,生成视觉数据,帮助算法估算其速度、方向和未来位置。
- 基于传感器的系统: 这些系统利用运动传感器、雷达或红外摄像头的测量数据,实时精确地测量球的位置、速度和旋转情况。
- 混合方法: 它们结合了两种或多种技术。例如,将计算机视觉与基于物理的建模相结合,以获得更准确、更可靠的轨迹预测。
接下来,我们将深入研究基于计算机视觉的球类轨迹预测是如何工作的,以及使之成为可能的算法。
Link to this section球类轨迹预测的基础知识#
在我们研究计算机视觉在球类轨迹预测中的作用及其工作原理之前,让我们先了解一下基础知识。
球类轨迹预测通常涉及两个主要部分:跟踪和运动建模。跟踪算法用于在视频中逐帧追踪球的位置,并估算它接下来会出现的位置。这些方法对于短期的实时预测非常有用。
另一方面,运动建模方法(通常涉及物理或机器学习)则更进一步。它们的目标是预测球的完整路径,包括它将落在哪里。
简单来说,跟踪确定了球的当前位置和运动状态,而建模则利用这些信息来估计其未来路径和着陆点。它们共同实现了准确的实时球类轨迹预测。
Link to this section深入了解跟踪与运动建模#
你可能想知道为什么要区分跟踪和预测。当我们进一步探讨这个主题时,你会注意到许多跟踪算法不仅仅进行跟踪。它们还会对球接下来会出现的位置做出短期预测。
例如,像 YOLO11 这样的计算机视觉模型,通过 ByteTrack 或 SORT 等跟踪算法支持 对象跟踪,利用来自视频每一帧的检测数据来实时估算球的下一个位置。即使在球快速移动或部分被遮挡时,这也能帮助系统保持准确的跟踪。
然而,虽然这些模型在追踪运动方面表现出色,但它们通常只预测球的下一个位置,而不是整个飞行路径或着陆点。这就是运动建模方法变得至关重要的原因。
换句话说,单靠计算机视觉模型无法完全预测球的轨迹。它能够逐帧检测和跟踪球的位置,但它并不考虑影响球运动的物理力,如重力、旋转、阻力或空气阻力。
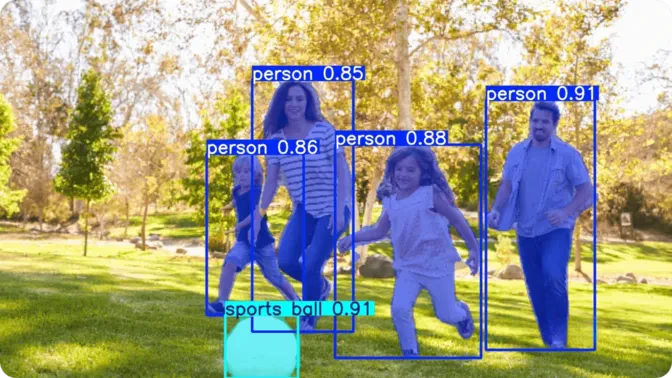
图 2. 使用 YOLO11 进行球体检测和分割的示例。(来源)
为了做出准确的长期预测,来自计算机视觉的视觉数据通常与运动建模方法相结合。这些方法使用基于物理的方程或机器学习算法来分析球随时间的运动,并预测其完整路径,包括它的落点。
Link to this section计算机视觉中用于球体跟踪的常用算法#
跟踪算法是球类轨迹预测系统的重要组成部分。它们在估计球的位置和运动随时间变化的同时,还要处理诸如短暂遮挡(球暂时从视线中消失)等挑战。
接下来,我们将介绍一些常见的跟踪算法。
Link to this section卡尔曼滤波(Kalman Filter)#
卡尔曼滤波 是一种数学算法,用于估算物体随时间变化的位置和速度,即使在测量存在噪声或不完整的情况下也是如此。例如,NASA 就曾使用卡尔曼滤波来跟踪和重建飞行器的路径。
通过将传感器数据与飞行器运动模型相结合,该系统可以清除噪声数据,准确重建实际飞行轨迹,并对飞行器接下来的去向进行短期预测。这使得该滤波器在许多领域的实时跟踪和控制中非常有用。
虽然卡尔曼滤波本身不是一种计算机视觉算法,但它常用于基于视觉的系统中,以跟踪跨视频帧的移动物体(如球)。它的工作原理是预测物体接下来会出现的位置,将该预测与实际检测数据进行比较,然后更新其估计值以保持准确性。这种持续的预测和校正周期使其即使在物体短暂消失或突然改变速度时,也能有效地进行实时跟踪。
Link to this sectionByteTrack#
ByteTrack 是一种实时对象跟踪算法,用于追踪视频帧中移动的物体(如球)。它的工作原理是检测每一帧中的物体,并随时间关联同一物体的检测结果,从而创建一个称为“tracklet”(短轨迹)的连续序列。
tracklet 是一系列简短的帧,显示了物体所处的位置及其运动轨迹。这种关联过程有助于系统在整个视频中保持每个物体一致的身份。
与丢弃低置信度检测结果的旧跟踪方法不同,ByteTrack 会保留并重新检查它们。这意味着即使物体快速移动、变得模糊或被短暂遮挡,它也能保持平滑稳定的跟踪。虽然 ByteTrack 本身不是对象检测器,但它通常与 Ultralytics YOLOv8 或 YOLO11 等计算机视觉模型一起使用,以便准确可靠地进行实时对象跟踪。
Link to this sectionBoT-SORT#
BoT-SORT 是一种先进的多目标跟踪算法,它改进了系统跟踪视频帧中移动物体的方式。它在 ByteTrack 的基础上增加了关键功能,如摄像机运动补偿和物体重新识别。
摄像机运动补偿有助于校正摄像机的平移或抖动,而重新识别功能让系统能够在物体离开视线并重新出现后,识别并继续跟踪同一个物体。与 ByteTrack 一样,它也常与 YOLOv8 或 YOLO11 等模型组合使用。
Link to this section常见的轨迹预测方法#
既然我们已经了解了跟踪的工作原理以及它与球体轨迹预测之间的联系,让我们仔细看看用于估算球体运动的主要类型的轨迹预测算法和方法。
Link to this section基于物理的运动学建模#
基于物理的运动学建模使用基本的运动定律来预测球的轨迹。它考虑了球的初始速度、发射角、重力、空气阻力和旋转等因素来计算飞行路径。通过组合这些因素,模型可以估算球在任何时刻的位置、移动速度和方向。
例如,在棒球或高尔夫球等运动中,它有助于根据挥杆速度和发射角预测球的飞行距离和方向。虽然在受控环境中非常准确,但它在处理风力、反弹或球员互动等不可预测的现实环境时可能会遇到困难,从而导致预测误差。
当与计算机视觉相结合时,基于物理模型的方法在体育分析和裁判系统中实现了实际应用。例如,Hawk-Eye 就是一种多摄像头视觉系统,可以实时重建球的 3D 轨迹。
它利用多个同步的高速摄像机从多个角度捕获球的位置,并应用三角测量、运动学方程和插值方法来估计其路径。这种集成支持了包括网球、板球和足球在内的体育运动中的精确跟踪和决策,在这些项目中,轨迹的准确性对于判定界内界外和表现分析至关重要。
Link to this section机器学习回归模型#
机器学习回归模型无需依赖明确的物理方程即可预测球的未来位置或轨迹。相反,它们通过基于视频的跟踪系统或传感器收集的数据(如位置、速度、旋转和角度)来学习模式。
当与计算机视觉跟踪算法相结合时,视觉系统会捕获球在视频帧中的位置。这些位置数据成为回归模型的输入,该模型会学习球的运动随时间如何变化。一旦训练完成,模型就能根据已经观测到的情况预测球的下一个位置或整体路径。
例如,在 乒乓球机器人 系统方面,在数千个被跟踪的轨迹上训练出来的回归模型已被证明可以实时预测球的飞行和反弹模式。这让机器人能够定位自身或快速反应以接住或回击乒乓球。由于这些模型直接从真实世界的示例中学习,它们往往比纯粹的基于物理的方法更能处理不可预测的影响,如旋转、空气阻力或表面接触。
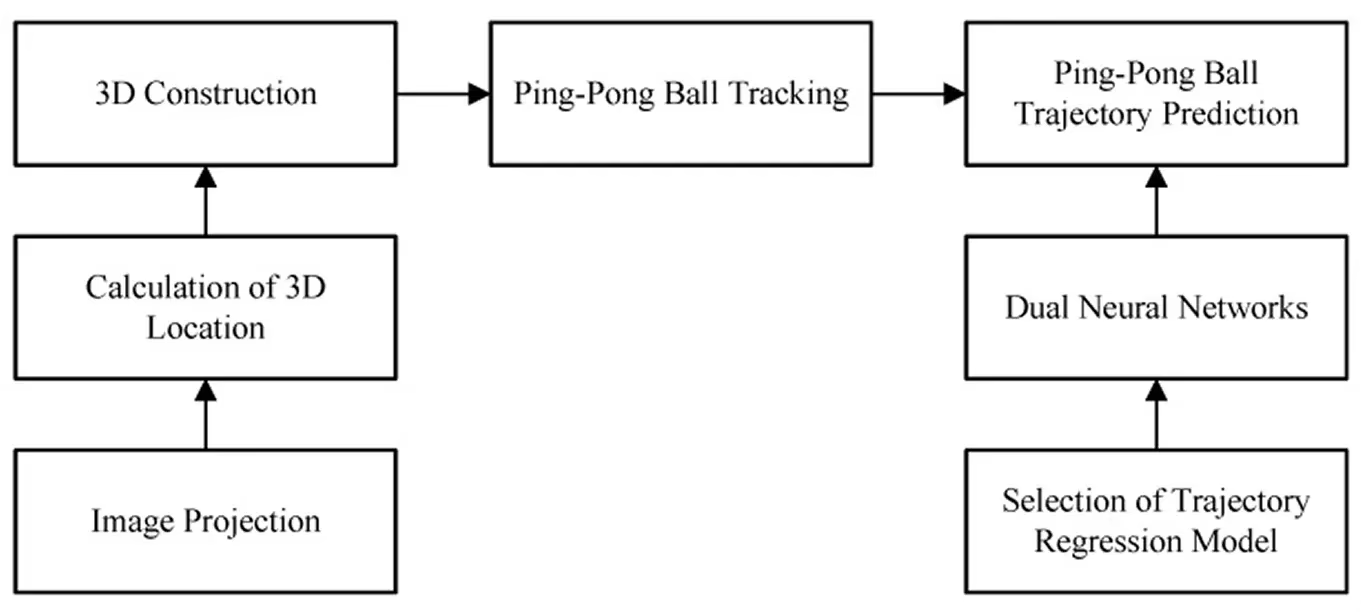
图 3. 乒乓球机器人如何预测球的轨迹。(来源)
Link to this section循环神经网络 (RNN) 和长短期记忆网络 (LSTM)#
循环神经网络 (RNN) 和 长短期记忆 网络 (LSTM) 是专门设计用于处理随时间变化的数据(如运动或其他时间序列信息)的 AI 模型。它们可以记住之前发生的事情,这有助于它们识别运动模式并预测接下来可能发生的事情。
在球类轨迹预测中,这些模型可以学习球过去的位置、速度和旋转如何影响它接下来的去向。当与计算机视觉和对象跟踪相结合时,视觉系统可以捕获球在各帧中的位置。RNN 随后可以使用这一位置序列来预测球的下一步动作或完整路径。
此外,LSTM 尤其具有影响力,因为它们能够记住较长时间内的信息。这使得它们即使在球快速移动或改变方向时也能跟踪其完整运动过程。
近期的研究将这一理念更进一步。科学家们开发了分层双向 LSTM (Hierarchical Bi-LSTM) 模型,可以通过分析球员如何移动以及彼此之间的互动来 预测球的轨迹,这在团队体育中非常有用。这些模型甚至可以利用球员行为的模式来推断球最可能的位置,从而估算球在暂时被遮挡或离开视线时的位置。
Link to this section球类轨迹预测的实际应用#
在更好地理解计算机视觉和球类轨迹预测之后,让我们探索其在体育、康复和 机器人技术 等领域的实际应用。
Link to this section体育运动中的球类轨迹预测#
了解球的运动方式及其落点在许多运动中至关重要。利用来自摄像头和传感器的信息,AI 模型可以预测球的路径和初始速度,帮助体育团队预判比赛、改进技术并做出更明智的决策。
它还可以通过分析旋转或释放角度等因素来支持运动员训练,帮助他们提高成绩并避免受伤。许多尖端的体育训练系统现在都利用球类轨迹预测来增强技能开发和战略制定。
例如,研究人员已经开发出一种用于网球机器人的计算机视觉系统,可以检测并预测 网球的路径。通过使用立体摄像机和卷积神经网络,该系统帮助机器人以三维方式(x 轴、y 轴和 z 轴)观察球,并在比赛中更准确地做出反应。这对于训练运动员参加比赛而言,可能是一个改变游戏规则的工具。
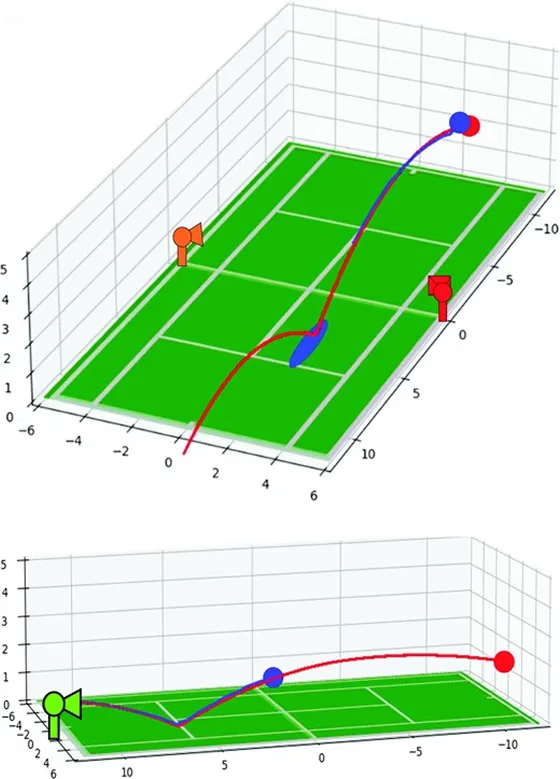
图 4. 红色显示的是模拟路径;蓝色显示的是机器人的球体轨迹预测。(来源)
Link to this section基于计算机视觉的球类轨迹预测的优缺点#
以下是使用基于计算机视觉的球类轨迹预测系统的一些主要优势:
- 实时预测: 这些系统可以瞬间准确预测球的未来路径,即使在高速运动时也是如此。
- 非侵入式: 它们可以仅依靠视频输入运行,而无需物理传感器或标记。
- 可扩展且适应性强: 基于视觉的球类轨迹预测系统可以使用标准的摄像头设置,应用于不同的体育项目和环境。
虽然基于计算机视觉的球类轨迹预测有许多好处,但也有一些局限性需要考虑。以下是一些需要牢记的因素:
- 遮挡挑战: 当球被运动员或其他物体遮挡时,预测的准确性往往会降低。
- 光照和可见度问题: 在光线不足或背景复杂的情况下(例如在晚上),这些系统的性能可能会下降。
- 计算需求高: 处理高帧率视频和深度学习模型需要功能强大的硬件,这可能会很昂贵。
Link to this section关键要点#
利用视觉 AI 预测球的轨迹,将物理学、计算机视觉和机器学习结合在一起,能够以惊人的准确度理解和预测运动。从分析体育表现到辅助患者康复和工业自动化系统,轨迹预测将视觉数据转化为可操作的见解。随着技术的不断进步,它正在为更智能、更快速、更具适应性的方法铺平道路,从而提升性能、安全性和决策水平。
加入我们日益壮大的 社区,并探索我们的 GitHub 存储库 以获取实用的 AI 资源。要立即构建视觉 AI 应用,请探索我们的 许可选项。通过访问我们的解决方案页面,了解 农业 AI 如何改变农业,以及 机器人视觉 AI 如何塑造未来。






