Os melhores modelos de detecção de objetos de 2025
Explora os melhores modelos de detecção de objetos em 2026, com uma análise das arquiteturas populares, compromissos de desempenho e fatores práticos de implantação.
No início deste ano, Andrew Ng, um pioneiro em IA e machine learning, introduziu o conceito de detecção de objetos agentic. Esta abordagem utiliza um agente de raciocínio para detectar objetos com base em um prompt de texto, sem a necessidade de grandes quantidades de dados de treinamento.
Ser capaz de identificar objetos em imagens e vídeos sem a necessidade de enormes datasets rotulados é um passo em direção a sistemas de computer vision mais inteligentes e flexíveis. No entanto, a IA de visão agentic ainda está nos seus estágios iniciais.
Embora consiga lidar com tarefas gerais, como detectar pessoas ou placas de sinalização em uma imagem, aplicações de computer vision mais precisas ainda dependem de modelos de detecção de objetos tradicionais. Estes modelos são treinados em datasets grandes e cuidadosamente rotulados para aprender exatamente o que procurar e onde os objetos estão localizados.
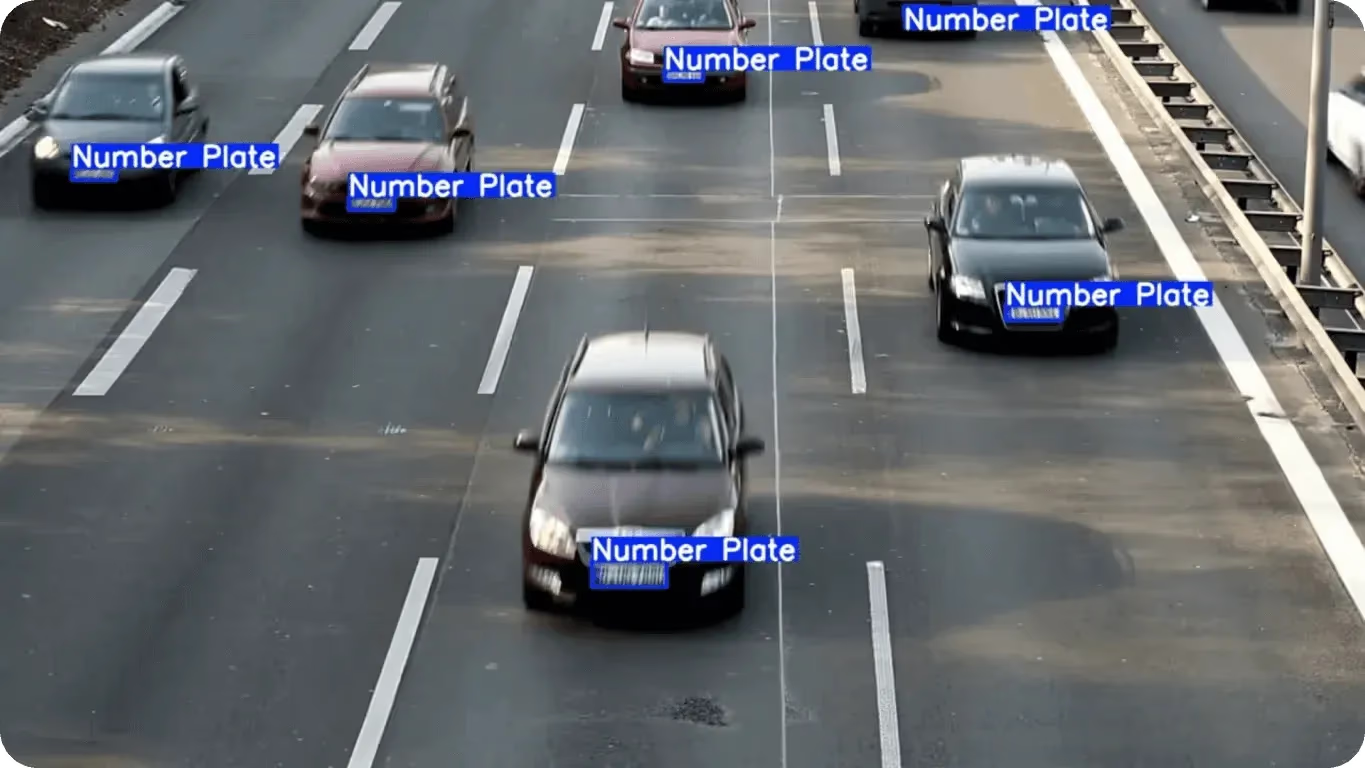
Fig 1. Um exemplo de detecção de objetos. (Fonte)
A object detection tradicional é essencial porque oferece tanto o reconhecimento, identificando o que é o objeto, quanto a localização, determinando exatamente onde ele está na imagem. Esta combinação permite que as máquinas executem tarefas complexas do mundo real de forma confiável, desde veículos autônomos até automação industrial e diagnósticos médicos.
Graças aos avanços tecnológicos, os modelos de detecção de objetos continuam a melhorar, tornando-se mais rápidos, mais precisos e mais adequados para ambientes do mundo real. Neste artigo, vamos explorar alguns dos melhores modelos de detecção de objetos disponíveis hoje. Vamos começar!
Link to this sectionA necessidade de detecção de objetos#
Computer vision tasks como a classificação de imagens podem ser usadas para dizer se uma imagem contém um carro, uma pessoa ou outro objeto. No entanto, elas não conseguem determinar onde o objeto está localizado dentro da imagem.
É aqui que a detecção de objetos pode ser útil. Modelos de detecção de objetos podem identificar quais objetos estão presentes e também apontar suas localizações exatas. Este processo, conhecido como localização, permite que as máquinas compreendam cenas com mais precisão e respondam adequadamente, seja parando um carro autônomo, guiando um braço robótico ou destacando uma área em imagens médicas.
A ascensão do deep learning transformou a detecção de objetos. Em vez de depender de regras codificadas manualmente, modelos modernos aprendem padrões diretamente de anotações e dados visuais. Esses datasets ensinam aos modelos como são os objetos, onde geralmente aparecem e como lidar com desafios como objetos pequenos, cenas poluídas ou condições de iluminação variáveis.
De fato, sistemas de detecção de objetos de última geração podem detectar vários objetos de uma só vez com precisão. Isso torna a detecção de objetos uma tecnologia crítica em aplicações como direção autônoma, robótica, saúde e automação industrial.
Link to this sectionComo funcionam as tarefas de detecção de objetos#
A entrada para um modelo de detecção de objetos é uma imagem, que pode vir de uma câmera, um quadro de vídeo ou até mesmo um exame médico. A imagem de entrada é processada por uma rede neural, normalmente uma rede neural convolucional (CNN), que é treinada para reconhecer padrões em dados visuais.
Dentro da rede, a imagem é analisada em estágios. Com base nos recursos que detecta, o modelo prevê quais objetos estão presentes e onde eles aparecem.
Essas previsões são representadas usando BBox, que são retângulos desenhados ao redor de cada objeto detectado. Para cada BBox, o modelo atribui um rótulo de classe (por exemplo, carro, pessoa ou cachorro) e uma pontuação de confiança indicando quão certo ele está sobre a previsão (isso também pode ser pensado como uma probabilidade).
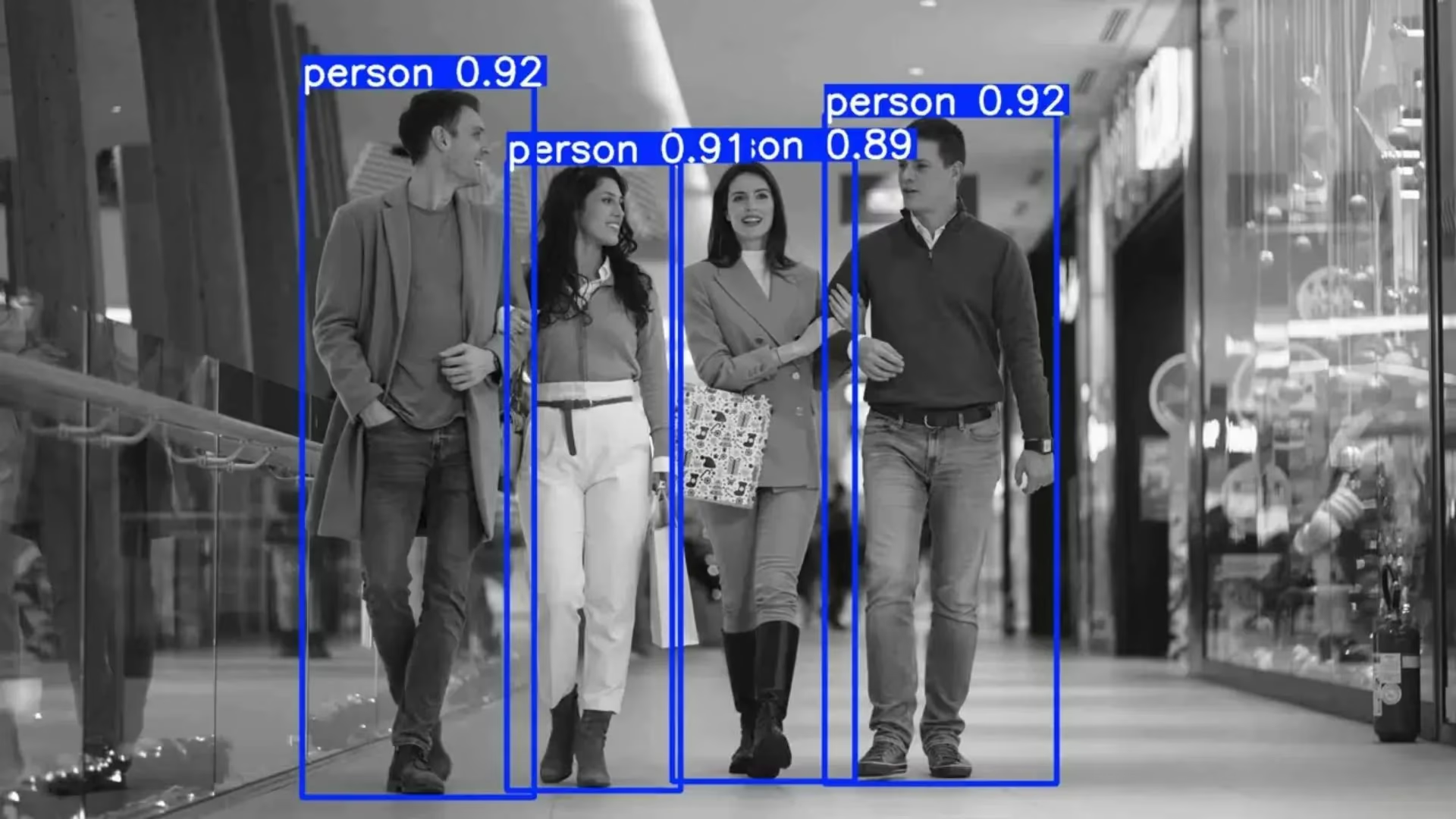
Fig 2. As previsões de detecção de objetos podem ser visualizadas usando BBox.
O processo geral depende fortemente da extração de características. O modelo aprende a identificar padrões visuais úteis, como bordas, formas, texturas e outras características distintivas. Esses padrões são codificados em mapas de características, que ajudam a rede a compreender a imagem em múltiplos níveis de detalhe.
Link to this sectionDetectando objetos: dois estágios e estágio único#
Dependendo da arquitetura do modelo, os detectores de objetos usam estratégias diferentes para localizar objetos, equilibrando velocidade, precisão e complexidade.
Muitos modelos de detecção de objetos, particularmente detectores de dois estágios como o Faster R-CNN, focam em partes específicas da imagem chamadas regiões de interesse (ROIs). Ao se concentrar nessas áreas, o modelo prioriza regiões com maior probabilidade de conter objetos, em vez de analisar cada pixel igualmente.
Por outro lado, modelos de estágio único como os primeiros modelos YOLO não selecionam ROIs específicos como os modelos de dois estágios fazem. Em vez disso, eles dividem a imagem em uma grade e usam caixas predefinidas, chamadas anchor boxes, juntamente com mapas de características para prever objetos em toda a imagem em uma única passada.
Hoje em dia, modelos de detecção de objetos de ponta estão explorando abordagens anchor-free. Diferente dos modelos tradicionais de estágio único que dependem de anchor boxes predefinidas, os modelos anchor-free preveem localizações e tamanhos de objetos diretamente a partir de mapas de características. Isso pode simplificar a arquitetura, reduzir a sobrecarga computacional e melhorar o desempenho, especialmente para detectar objetos de variadas formas e tamanhos.
Link to this sectionUm olhar sobre os melhores modelos de detecção de objetos#
Hoje, existem muitos modelos de detecção de objetos, cada um projetado com objetivos específicos em mente. Alguns são otimizados para desempenho em tempo real, enquanto outros focam em alcançar a maior precisão. Escolher o modelo certo para uma solução de computer vision geralmente depende do seu caso de uso específico e requisitos de desempenho.
A seguir, vamos explorar alguns dos melhores modelos de detecção de objetos de 2026.
Link to this sectionModelos Ultralytics YOLO#
Uma das famílias de modelos de detecção de objetos mais utilizadas atualmente é a família de modelos Ultralytics YOLO. YOLO, que significa You Only Look Once, é popular em todos os setores porque oferece um forte desempenho de detecção, sendo ao mesmo tempo rápido, confiável e fácil de trabalhar.
A família Ultralytics YOLO inclui Ultralytics YOLOv5, Ultralytics YOLOv8, Ultralytics YOLO11 e o futuro Ultralytics YOLO26, oferecendo uma gama de opções para diferentes requisitos de desempenho e casos de uso. Graças ao seu design leve e otimização de velocidade, os modelos Ultralytics YOLO são ideais para detecção em tempo real e podem ser implantados em dispositivos de borda com poder de computação e memória limitados.
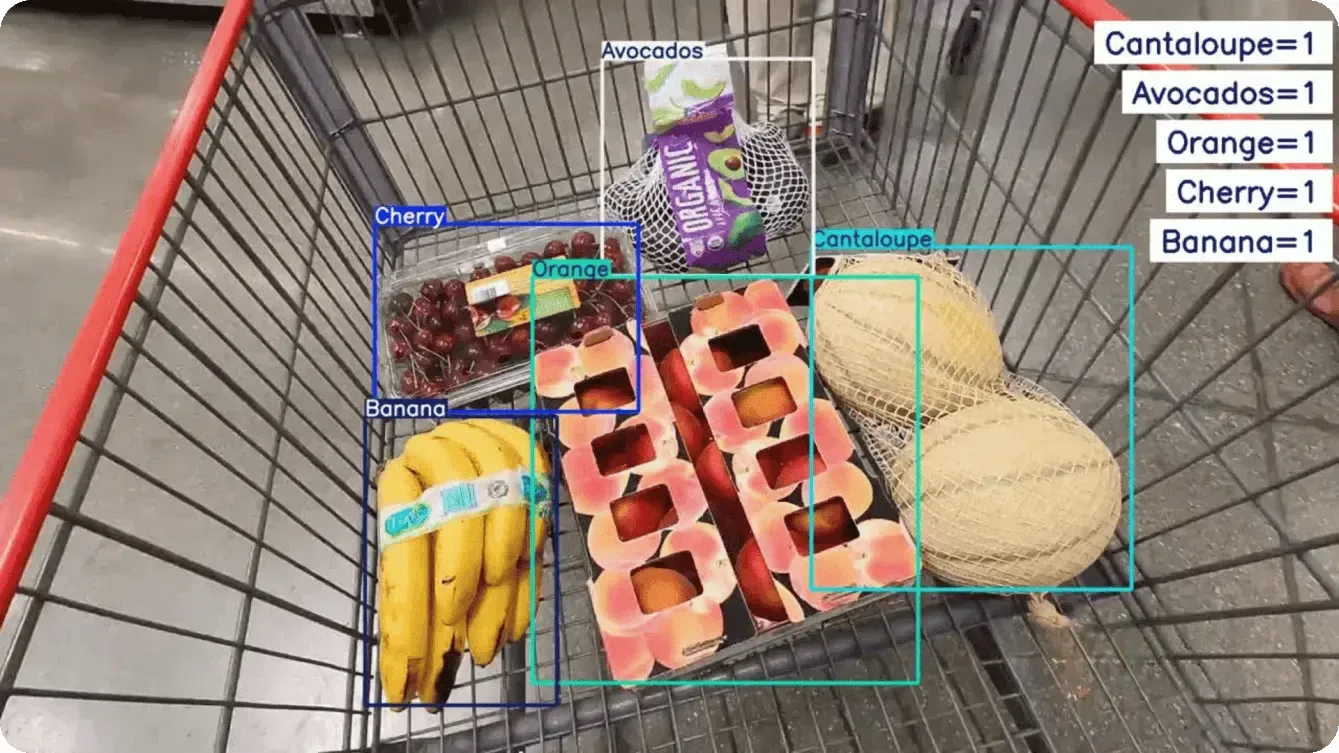
Fig 3. Usando Ultralytics YOLO11 para detecção de objetos (Fonte)
Além da detecção de objetos básica, esses modelos são altamente versáteis. Eles também suportam tarefas como segmentação de instância, que contorna objetos ao nível de pixel, e estimativa de pose, que identifica pontos-chave em pessoas ou objetos. Essa flexibilidade torna os modelos Ultralytics YOLO uma opção essencial para uma ampla gama de aplicações, desde agricultura e logística até varejo e manufatura.
Outra razão fundamental para a popularidade dos modelos Ultralytics YOLO é o Ultralytics Python package, que oferece uma interface simples e amigável para treinar, ajustar e implantar modelos. Desenvolvedores podem começar com pesos pré-treinados, personalizar os modelos para seus próprios datasets e implantá-los com apenas algumas linhas de código.
Link to this sectionRT-DETR e RT-DETRv2#
O RT-DETR (Real-Time Detection Transformer) e o mais recente RT-DETRv2 são modelos de detecção de objetos criados para uso em tempo real. Diferente de muitos modelos tradicionais, eles podem pegar uma imagem e fornecer as detecções finais diretamente, sem usar NMS.
NMS é uma etapa que remove caixas sobrepostas extras quando um modelo prevê o mesmo objeto mais de uma vez. Ignorar o NMS torna o processo de detecção mais simples e rápido.
Esses modelos combinam CNNs com Transformers. A CNN encontra detalhes visuais como bordas e formas, enquanto o Transformer é um tipo de rede neural que pode observar a imagem inteira de uma vez e entender como diferentes partes se relacionam. Essa compreensão abrangente permite que o modelo detecte objetos que estão próximos ou sobrepostos.
O RT-DETRv2 melhora o modelo original com recursos como detecção multiescala, que ajuda a encontrar objetos pequenos e grandes, e um melhor gerenciamento de cenas complexas. Essas mudanças mantêm o modelo rápido enquanto melhoram a precisão.
Link to this sectionRF-DETR#
O RF-DETR é um modelo baseado em Transformer para tempo real, projetado para combinar a precisão de arquiteturas Transformer com a velocidade necessária para aplicações do mundo real. Como o RT-DETR e o RT-DETRv2, ele usa um Transformer para analisar a imagem inteira e uma CNN para extrair características visuais finas, como bordas, formas e texturas.
O modelo prevê objetos diretamente da imagem de entrada, ignorando anchor boxes e NMS, o que simplifica o processo de detecção e mantém a inferência rápida. O RF-DETR também suporta segmentação de instância, permitindo que ele contorne objetos ao nível de pixel, além de prever BBox.
Link to this sectionEfficientDet#
Lançado no final de 2019, o EfficientDet é um modelo de detecção de objetos projetado para escala eficiente e alto desempenho. O que diferencia o EfficientDet é o compound scaling, um método que escala a resolução de entrada, profundidade da rede e largura da rede simultaneamente, em vez de ajustar apenas um fator. Essa abordagem ajuda o modelo a manter uma precisão estável, seja dimensionado para tarefas de alto desempenho ou reduzido para implantações leves.
Outro componente chave do EfficientDet é seu FPN eficiente, que permite ao modelo analisar imagens em múltiplas escalas. Essa análise multiescala é crucial para detectar objetos de diferentes tamanhos, permitindo que o EfficientDet identifique de forma confiável tanto objetos pequenos quanto grandes dentro da mesma imagem.
Link to this sectionPP-YOLOE+#
Lançado em 2022, o PP-YOLOE+ é um modelo de detecção de objetos no estilo YOLO, o que significa que ele detecta e classifica objetos em uma única passada sobre a imagem. Essa abordagem o torna rápido e adequado para aplicações em tempo real, mantendo uma alta precisão.
Uma das principais melhorias no PP-YOLOE+ é o aprendizado alinhado à tarefa, que ajuda as pontuações de confiança do modelo a refletirem com precisão a localização dos objetos. Isso é especialmente útil para detectar objetos pequenos ou sobrepostos.
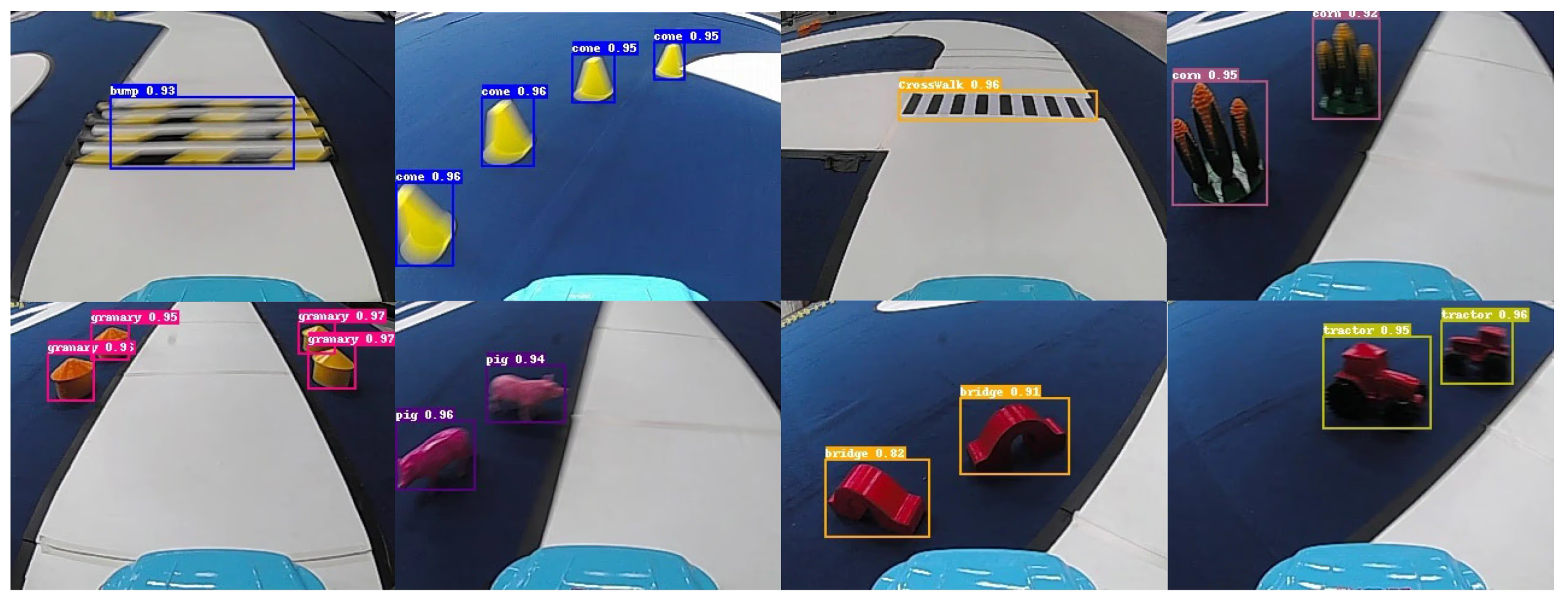
Fig 4. Detectando objetos usando PP-YOLOE+ (Fonte)
O modelo também usa uma arquitetura de cabeça desacoplada, que separa as tarefas de prever localizações de objetos e rótulos de classe. Isso permite que ele desenhe BBox com mais precisão enquanto classifica os objetos corretamente.
Link to this sectionGroundingDINO#
O GroundingDINO é um modelo de detecção de objetos baseado em Transformer que combina visão e linguagem. Em vez de depender de um conjunto fixo de categorias, ele permite que os usuários detectem objetos usando prompts de texto em linguagem natural.
Ao alinhar características visuais de uma imagem com descrições de texto, o modelo pode localizar objetos mesmo se esses rótulos exatos não estiverem nos seus dados de treinamento. Isso significa que você pode solicitar ao modelo descrições como “uma pessoa usando capacete” ou “um carro vermelho perto de um prédio”, e ele gerará BBox precisos ao redor dos objetos correspondentes.
Além disso, ao suportar detecção zero-shot, o GroundingDINO reduz a necessidade de retreinar ou ajustar o modelo para cada novo caso de uso, tornando-o altamente flexível em uma ampla gama de aplicações. Essa combinação de compreensão de linguagem e reconhecimento visual abre novas possibilidades para sistemas de IA interativos e adaptativos.
Link to this sectionMétricas comuns usadas para avaliar detectores de objetos#
Ao comparar vários modelos de detecção de objetos, você pode estar se perguntando como saber qual deles realmente tem o melhor desempenho. É uma boa pergunta, porque além da arquitetura do modelo e da qualidade dos seus dados, muitos fatores podem afetar o desempenho.
Pesquisadores frequentemente dependem de benchmarks compartilhados e métricas de desempenho padrão para avaliar modelos de forma consistente, comparar resultados e entender as compensações entre velocidade e precisão. Benchmarks padrão são especialmente importantes porque muitos modelos de detecção de objetos são avaliados nos mesmos datasets, como o dataset COCO.
Link to this sectionMedindo a precisão e a velocidade de detecção#
Aqui está uma visão mais detalhada de algumas métricas comuns usadas para avaliar modelos de detecção de objetos:
- IoU (Intersection over Union): Esta métrica mede quanto uma BBox prevista se sobrepõe ao objeto real em uma imagem. Ela compara a caixa desenhada pelo modelo com a caixa ground-truth, que é a localização do objeto conforme rotulado no dataset. IoU é calculado como a área de sobreposição dividida pela área de união das duas caixas. Um IoU mais alto indica que o modelo está posicionando a caixa com mais precisão, enquanto um IoU mais baixo significa que a previsão é menos precisa. Em termos simples, o IoU mostra o quão próximas as previsões do modelo correspondem às localizações reais dos objetos.
- mAP (Mean average precision): É a métrica principal usada para avaliar o desempenho geral da detecção de objetos. Ela considera tanto o número de objetos que o modelo detecta corretamente quanto a precisão dessas detecções em diferentes níveis de confiança e categorias de objetos.
- FPS (Frames per second) e latência: FPS mostra quantas imagens ou quadros de vídeo um modelo pode processar em um segundo. Por exemplo, um modelo rodando a 30 FPS pode lidar com 30 quadros a cada segundo. FPS mais alto significa que o sistema pode responder mais rapidamente, o que é importante para casos de uso como vídeo ao vivo, monitoramento de tráfego ou robótica. A latência, por outro lado, mede quanto tempo o modelo leva para processar uma única imagem ou quadro, desde o momento em que é recebido até o momento em que o resultado está pronto.
Link to this sectionPrós e contras de usar algoritmos de detecção de objetos#
Aqui estão algumas das principais vantagens de usar modelos de detecção de objetos em aplicações do mundo real:
- Escala entre setores: A detecção de objetos pode ser aplicada a uma ampla gama de casos de uso, desde monitoramento de tráfego e análise de varejo até saúde, agricultura e manufatura.
- Reduz o esforço manual: Automatizar inspeção visual e tarefas de monitoramento reduz a necessidade de supervisão humana constante e ajuda as equipes a focarem em trabalhos de maior valor.
- Beneficia-se de ecossistemas open-source: Comunidades open-source ativas e recursos no GitHub facilitam o acesso a modelos pré-treinados, a experimentação e a personalização de soluções.
Apesar desses prós, existem limitações práticas que podem afetar o desempenho dos modelos de detecção de objetos. Aqui estão alguns fatores vitais a considerar:
- Requisitos de dados de alta qualidade: Modelos de detecção de objetos dependem de grandes datasets bem anotados para treinamento. Criar e manter esses dados pode ser demorado, caro e difícil de escalar.
- Demandas computacionais: Modelos que oferecem maior precisão de detecção geralmente exigem um poder de processamento significativo, tanto durante o treinamento quanto na implantação em tempo real. Isso normalmente significa usar GPUs de alto desempenho, o que pode aumentar os custos de infraestrutura.
- Sensibilidade às condições do mundo real: Variações na iluminação, ângulos de câmera, clima e cenas lotadas podem afetar o desempenho da detecção, tornando necessários testes e ajustes contínuos.
Link to this sectionPrincipais pontos#
O melhor modelo de detecção de objetos para o seu projeto de computer vision depende do seu caso de uso, configuração de dados, requisitos de desempenho e restrições de hardware. Alguns modelos são otimizados para velocidade, enquanto outros focam em precisão, e a maioria das aplicações do mundo real precisa de um equilíbrio entre ambos. Graças a frameworks open-source e comunidades ativas no GitHub, esses modelos estão se tornando mais fáceis de avaliar, adaptar e implantar para uso prático.
Para saber mais, explore nosso GitHub repository. Participe da nossa comunidade e confira nossas páginas de soluções para ler sobre aplicações como IA na saúde e computer vision na indústria automotiva. Descubra nossas opções de licenciamento para começar hoje com a visão de IA.






