Интеграция компьютерного зрения в робототехнику с помощью Ultralytics YOLO11
Взгляни ближе на то, как модели компьютерного зрения, такие как Ultralytics YOLO11, делают роботов умнее и формируют будущее робототехники.

Роботы прошли долгий путь с момента появления Unimate, первого промышленного робота, изобретенного в 1950-х годах. То, что начиналось как заранее запрограммированные, основанные на правилах машины, теперь превратилось в интеллектуальные системы, способные выполнять сложные задачи и беспрепятственно взаимодействовать с реальным миром.
Сегодня роботы используются в самых разных отраслях: от производства и здравоохранения до сельского хозяйства, для автоматизации разнообразных процессов. Ключевым фактором развития робототехники стал ИИ и компьютерное зрение — область ИИ, которая помогает машинам понимать и интерпретировать визуальную информацию.
Например, модели компьютерного зрения, такие как Ultralytics YOLO11, повышают интеллект робототехнических систем. При интеграции в эти системы ИИ-зрение позволяет роботам распознавать объекты, ориентироваться в пространстве и принимать решения в реальном времени.
В этой статье мы рассмотрим, как YOLO11 может расширить возможности роботов с помощью передовых технологий компьютерного зрения, и изучим варианты применения в различных отраслях.
Link to this sectionОбзор ИИ и компьютерного зрения в робототехнике#
Основная функциональность робота зависит от того, насколько хорошо он понимает свое окружение. Эта осведомленность связывает его физическое оборудование с процессом принятия разумных решений. Без нее роботы могут только следовать жестким инструкциям и с трудом адаптируются к меняющейся обстановке или сложным задачам. Точно так же, как люди полагаются на зрение при навигации, роботы используют компьютерное зрение, чтобы интерпретировать окружающую среду, понимать ситуацию и предпринимать соответствующие действия.
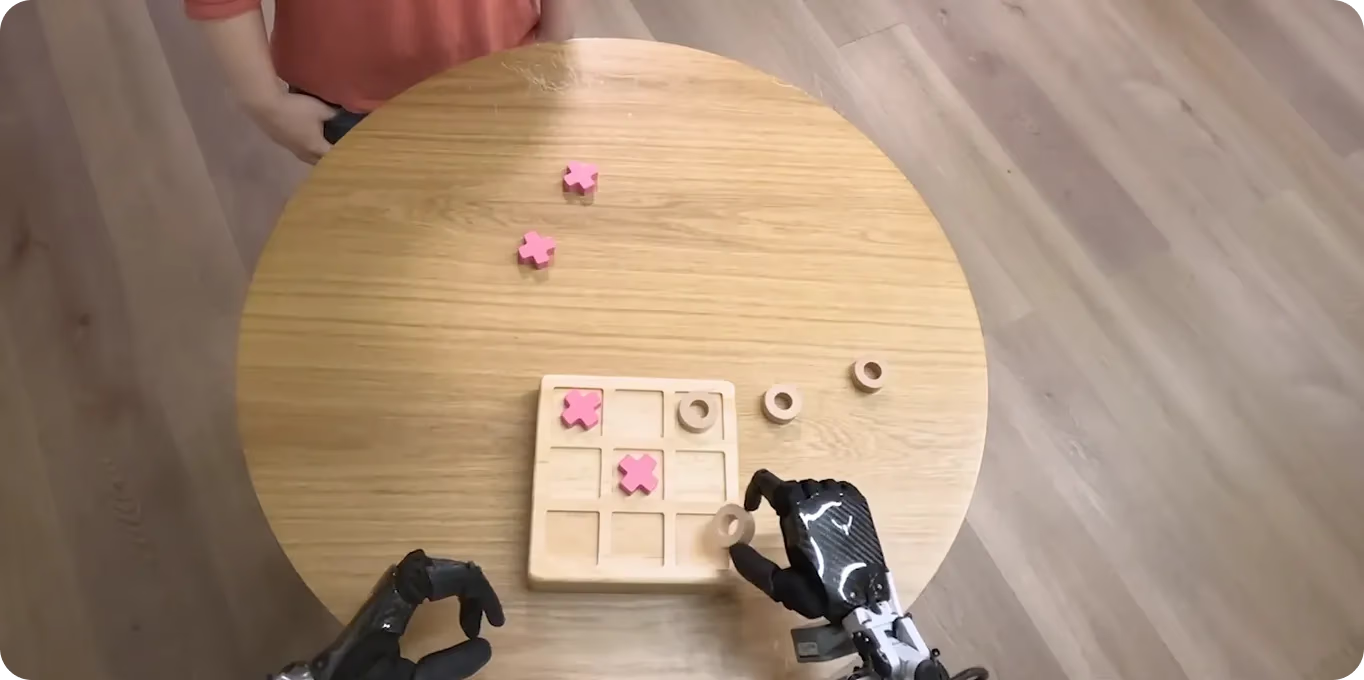
Рис. 1. Робот играет в крестики-нолики, используя компьютерное зрение для анализа поля и принятия стратегических решений.
На самом деле компьютерное зрение является основой большинства задач робототехники. Оно помогает роботам обнаруживать объекты и избегать препятствий во время движения. Однако для этого недостаточно просто «видеть» мир; роботы также должны уметь быстро реагировать. В реальных условиях даже небольшая задержка может привести к дорогостоящим ошибкам. Такие модели, как Ultralytics YOLO11, позволяют роботам собирать аналитические данные в реальном времени и реагировать мгновенно, даже в сложных или незнакомых ситуациях.
Link to this sectionЗнакомство с Ultralytics YOLO11#
Прежде чем мы перейдем к тому, как YOLO11 интегрируется в робототехнические системы, давай разберем ключевые особенности YOLO11.
Модели Ultralytics YOLO поддерживают различные задачи компьютерного зрения, помогая получать быстрые данные в реальном времени. В частности, Ultralytics YOLO11 предлагает более высокую производительность, меньшие вычислительные затраты и повышенную точность. Например, её можно использовать для обнаружения объектов на изображениях и видео с высокой точностью, что делает её идеальной для применения в таких областях, как робототехника, здравоохранение и производство.
Вот несколько важных особенностей, которые делают YOLO11 отличным выбором для робототехники:
- Простота развертывания: её легко развертывать, и она беспрепятственно интегрируется с широким спектром программных и аппаратных платформ.
- Адаптивность: YOLO11 отлично работает в различных условиях и на разных конфигурациях оборудования, обеспечивая стабильную производительность даже в динамичной среде.
- Удобство использования: понятная документация и интерфейс YOLO11 помогают сократить время на обучение, упрощая интеграцию в робототехнические системы.
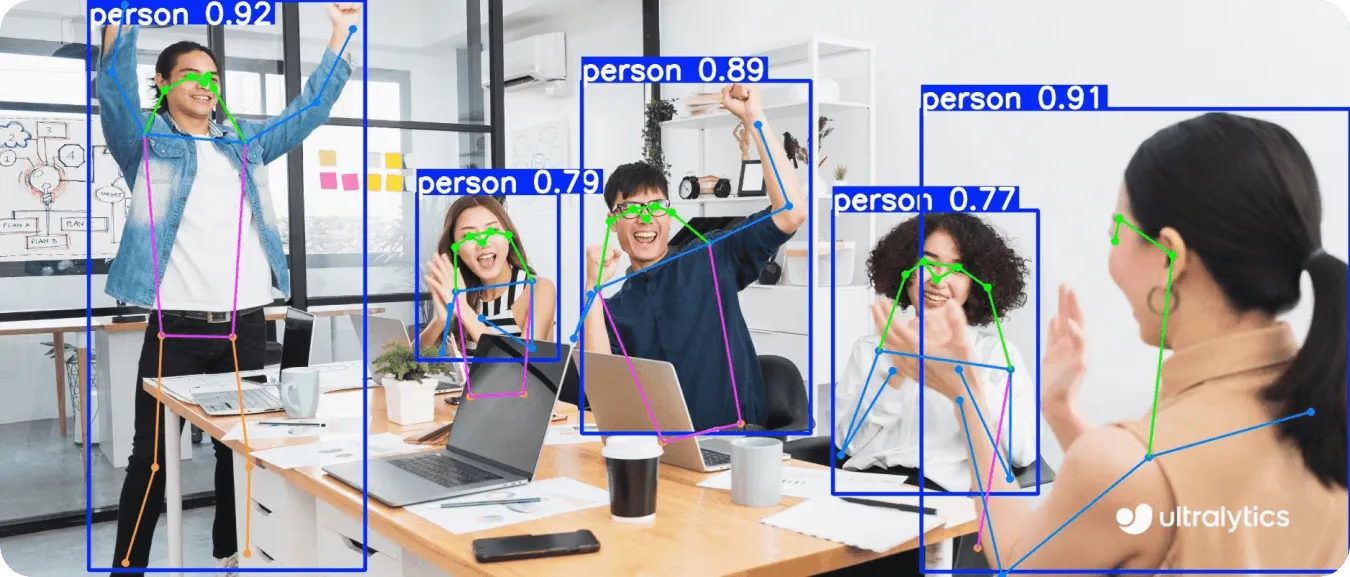
Рис. 2. Пример анализа позы людей на изображении с помощью YOLO11.
Link to this sectionИзучаем задачи компьютерного зрения, решаемые с помощью YOLO11#
Вот более подробный обзор некоторых задач компьютерного зрения, поддерживаемых YOLO11:
- Обнаружение объектов: возможность обнаружения объектов в реальном времени с помощью YOLO11 позволяет роботам мгновенно идентифицировать и определять местоположение объектов в поле своего зрения. Это помогает роботам избегать препятствий, выполнять динамическое планирование маршрута и осуществлять автоматизированную навигацию как в помещениях, так и на открытом пространстве.
- Сегментация экземпляров: определяя точные границы и формы отдельных объектов, YOLO11 позволяет роботам выполнять высокоточные операции захвата и перемещения, а также сложные сборочные задачи.
- Оценка позы: поддержка оценки позы в YOLO11 дает роботам возможность распознавать и интерпретировать движения и жесты человеческого тела. Это критически важно для безопасной совместной работы коллаборативных роботов (коботов) с людьми.
- Отслеживание объектов: YOLO11 позволяет отслеживать движущиеся объекты во времени, что делает её идеальной для задач автономной робототехники, где требуется мониторинг окружающей обстановки в реальном времени.
- Классификация изображений: YOLO11 может классифицировать объекты на изображениях, позволяя роботам сортировать предметы, обнаруживать аномалии или принимать решения на основе типа объекта, например, для идентификации медицинских принадлежностей в учреждениях здравоохранения.
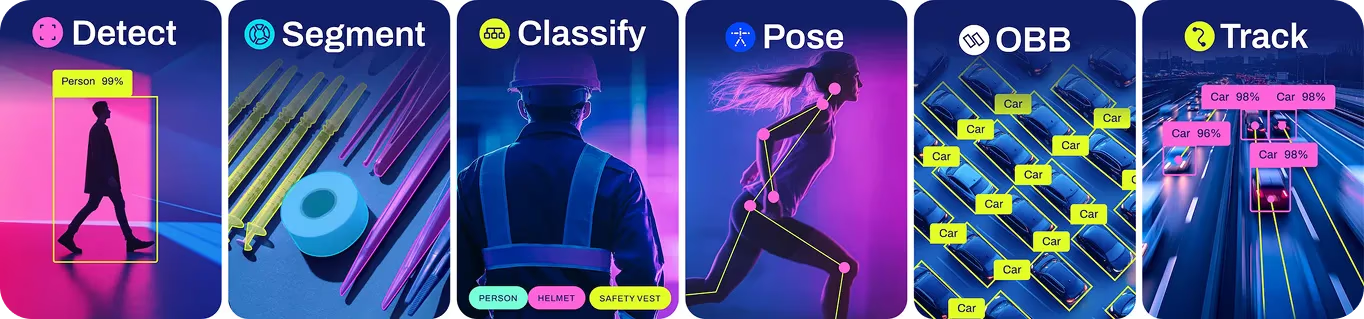
Рис. 3. Задачи компьютерного зрения, поддерживаемые YOLO11.
Link to this sectionПрименение ИИ в робототехнике: на базе YOLO11#
От интеллектуального обучения до промышленной автоматизации — такие модели, как YOLO11, помогают переосмыслить возможности роботов. Интеграция в робототехнику показывает, как модели компьютерного зрения стимулируют прогресс в автоматизации. Давай рассмотрим основные сферы, где YOLO11 может оказать значительное влияние.
Link to this sectionОбучение роботов с помощью компьютерного зрения#
Компьютерное зрение широко используется в антропоморфных роботах, позволяя им учиться, наблюдая за окружающей средой. Модели, подобные YOLO11, могут способствовать улучшению этого процесса за счет передового обнаружения объектов и оценки позы, что помогает роботам точно интерпретировать действия и поведение людей.
Анализируя тонкие движения и взаимодействия в реальном времени, роботов можно обучить воспроизведению сложных человеческих задач. Это позволяет им выйти за рамки заранее запрограммированных процедур и осваивать действия, такие как использование пульта дистанционного управления или отвертки, просто наблюдая за человеком.
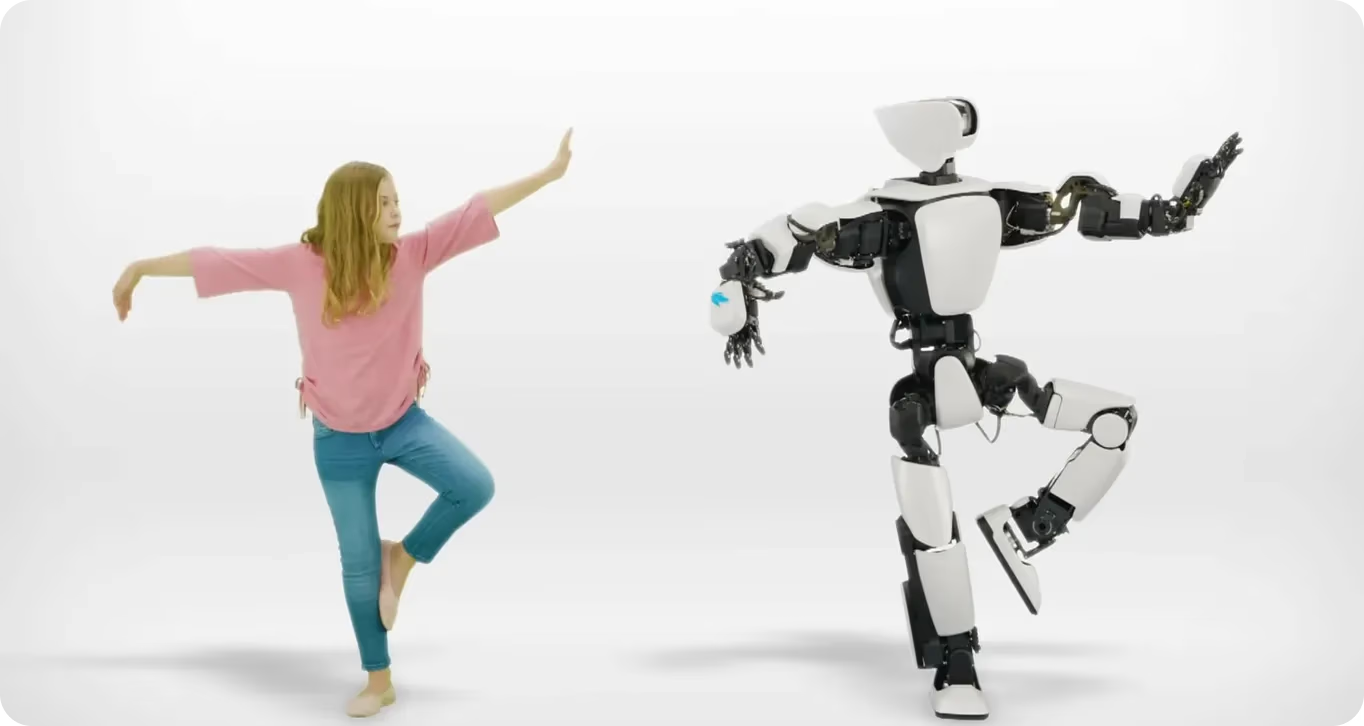
Рис. 4. Робот имитирует действия человека.
Этот тип обучения полезен в разных отраслях. Например, в сельском хозяйстве роботы могут наблюдать за тем, как работники выполняют задачи по посадке, сбору урожая и уходу за посевами. Копируя действия людей, роботы могут адаптироваться к различным условиям фермерства без необходимости программирования для каждой ситуации.
Link to this sectionПрименение в медицинской робототехнике#
Аналогичным образом в здравоохранении компьютерное зрение приобретает все большее значение. Например, YOLO11 можно использовать в медицинских устройствах для помощи хирургам при проведении сложных процедур. Благодаря таким функциям, как обнаружение объектов и сегментация экземпляров, YOLO11 помогает роботам распознавать внутренние структуры организма, управлять хирургическими инструментами и совершать точные манипуляции.
Хотя это звучит как научная фантастика, недавние исследования демонстрируют практическое применение компьютерного зрения в хирургических процедурах. В интересном исследовании по автономной роботизированной диссекции для холецистэктомии (удаления желчного пузыря) исследователи интегрировали YOLO11 для сегментации тканей (классификация и разделение различных тканей на изображении) и обнаружение ключевых точек хирургических инструментов (идентификация специфических ориентиров на инструментах).
Система была способна точно различать различные типы тканей — даже когда ткани деформировались (меняли форму) во время процедуры — и динамически адаптировалась к этим изменениям. Это позволило робототехническим инструментам следовать по точным путям диссекции (хирургического разреза).
Link to this sectionУмное производство и промышленная автоматизация#
Роботы, способные захватывать и перемещать объекты, играют ключевую роль в автоматизации производственных операций и оптимизации цепочек поставок. Их скорость и точность позволяют выполнять задачи с минимальным вмешательством человека, такие как идентификация и сортировка предметов.
Благодаря точной сегментации экземпляров в YOLO11, роботизированные манипуляторы могут быть обучены обнаруживать и сегментировать объекты, движущиеся по конвейерной ленте, точно захватывать их и размещать в назначенных местах в зависимости от типа и размера.
Например, популярные автопроизводители используют роботов со зрением для сборки деталей автомобилей, повышая скорость и точность сборочной линии. Модели компьютерного зрения, такие как YOLO11, позволяют этим роботам работать бок о бок с людьми, обеспечивая плавную интеграцию автоматизированных систем в динамичные производственные условия. Это ведет к сокращению времени производства, снижению количества ошибок и повышению качества продукции.
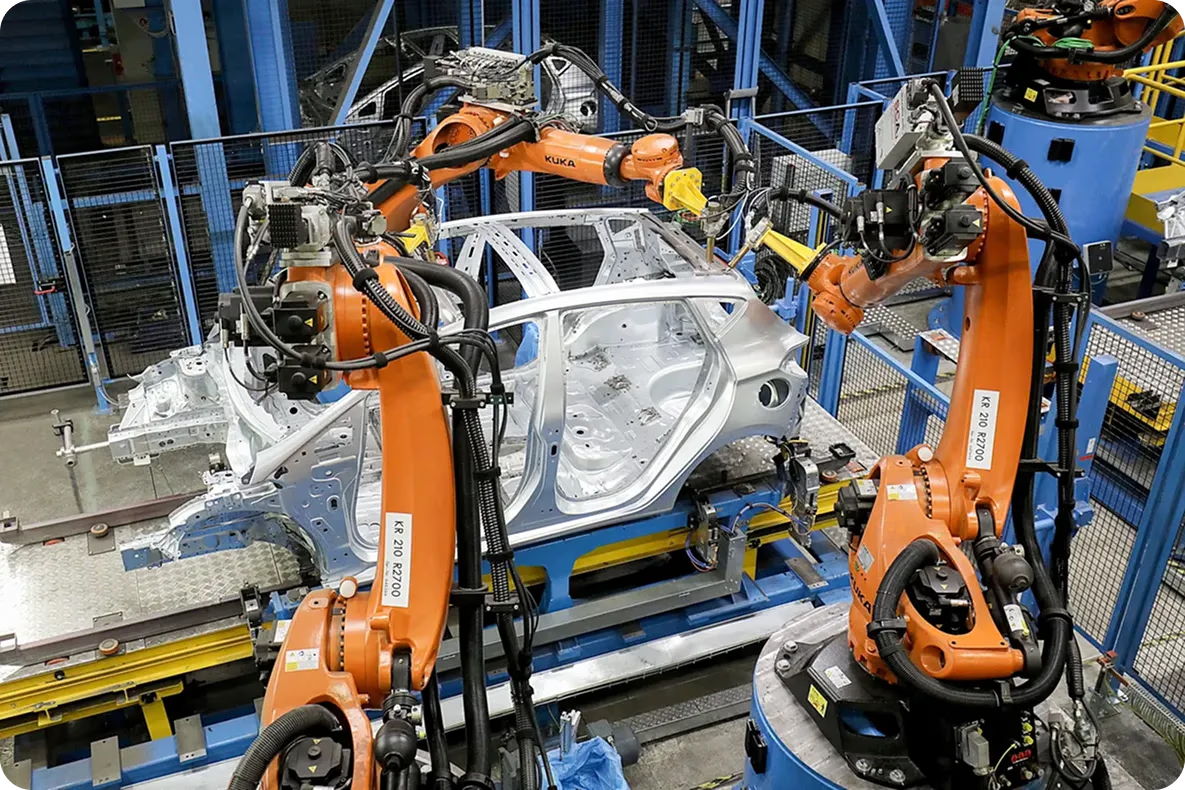
Рис. 5. Роботизированный манипулятор со зрением собирает автомобиль.
Link to this sectionПреимущества интеграции Ultralytics YOLO11 в робототехнику#
YOLO11 предлагает несколько ключевых преимуществ, которые делают её идеальной для бесшовной интеграции в автономные робототехнические системы. Вот некоторые из основных преимуществ:
- Низкая задержка вывода: YOLO11 может обеспечивать высокоточные прогнозы с низкой задержкой даже в динамических условиях.
- Облегченные модели: разработанные для оптимизации производительности, облегченные модели YOLO11 позволяют небольшим роботам с ограниченной вычислительной мощностью обладать продвинутыми возможностями зрения без ущерба для эффективности.
- Энергоэффективность: YOLO11 разработана с учетом энергоэффективности, что делает её идеальной для роботов с питанием от аккумуляторов, которым необходимо экономить энергию, сохраняя при этом высокую производительность.
Link to this sectionОграничения ИИ-зрения в робототехнике#
Хотя модели компьютерного зрения предоставляют мощные инструменты для робототехники, существуют некоторые ограничения, которые необходимо учитывать при интеграции в реальные системы. К ним относятся:
- Дорогостоящий сбор данных: обучение эффективных моделей для специализированных задач робототехники часто требует больших, разнообразных и хорошо размеченных наборов данных, получение которых обходится дорого.
- Изменчивость внешней среды: роботы работают в непредсказуемых условиях, где такие факторы, как освещение или загроможденный фон, могут повлиять на производительность моделей зрения.
- Проблемы калибровки и выравнивания: обеспечение правильной калибровки систем зрения и их согласованности с другими сенсорами робота жизненно важно для точной работы, а рассогласование может привести к ошибкам в принятии решений.
Link to this sectionБудущее развития робототехники и ИИ#
Системы компьютерного зрения — это не просто инструменты для сегодняшних роботов; это фундамент будущего, в котором роботы смогут действовать автономно. Благодаря способностям обнаружения в реальном времени и поддержке множества задач они идеально подходят для робототехники следующего поколения.
На самом деле текущие рыночные тенденции показывают, что компьютерное зрение становится все более важным в робототехнике. Отраслевые отчеты подчеркивают, что компьютерное зрение является второй по распространенности технологией на мировом рынке ИИ-робототехники.
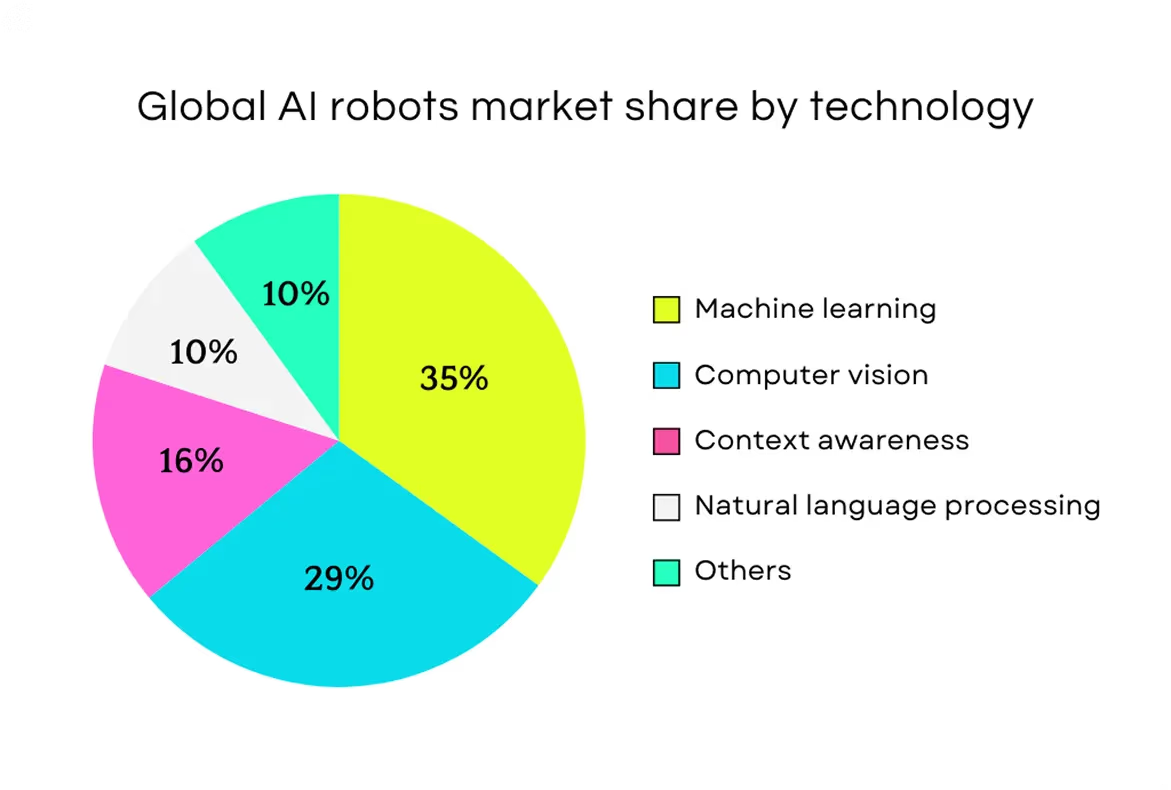
Рис. 6. Доля мирового рынка ИИ-роботов по технологиям.
Link to this sectionОсновные выводы#
Благодаря способности обрабатывать визуальные данные в реальном времени, YOLO11 может помочь роботам точнее обнаруживать, идентифицировать объекты и взаимодействовать с окружающим миром. Это имеет огромное значение в таких сферах, как производство, где роботы могут сотрудничать с людьми, и здравоохранение, где они могут ассистировать при сложных хирургических операциях.
По мере развития робототехники интеграция компьютерного зрения в такие системы будет иметь решающее значение для расширения возможностей роботов по эффективному выполнению широкого спектра задач. Будущее робототехники выглядит многообещающим, а ИИ и компьютерное зрение способствуют созданию еще более умных и адаптивных машин.
Присоединяйся к нашему сообществу и загляни в наш репозиторий на GitHub, чтобы узнать больше о последних достижениях в области ИИ. Исследуй различные варианты применения ИИ в здравоохранении и компьютерного зрения в сельском хозяйстве на наших страницах с решениями. Ознакомься с нашими планами лицензирования, чтобы создавать свои собственные решения в области компьютерного зрения.






