Лучшие модели обнаружения объектов 2025 года
Исследуй лучшие модели детектирования объектов в 2026 году, ознакомившись с популярными архитектурами, компромиссами в производительности и практическими факторами развертывания.
Ранее в этом году Эндрю Ын, пионер в области ИИ и машинного обучения, представил концепцию агентного обнаружения объектов. Этот подход использует интеллектуального агента для обнаружения объектов на основе текстовой подсказки без необходимости использования огромных объемов обучающих данных.
Способность идентифицировать объекты на изображениях и видео без огромных размеченных наборов данных — это шаг к созданию более интеллектуальных и гибких систем computer vision. Однако агентный визуальный ИИ все еще находится на ранней стадии развития.
Хотя он справляется с общими задачами, например, обнаружением людей или дорожных знаков на изображении, более точные приложения компьютерного зрения все еще опираются на традиционные модели обнаружения объектов. Эти модели обучаются на больших, тщательно размеченных наборах данных, чтобы точно знать, что искать и где расположены объекты.
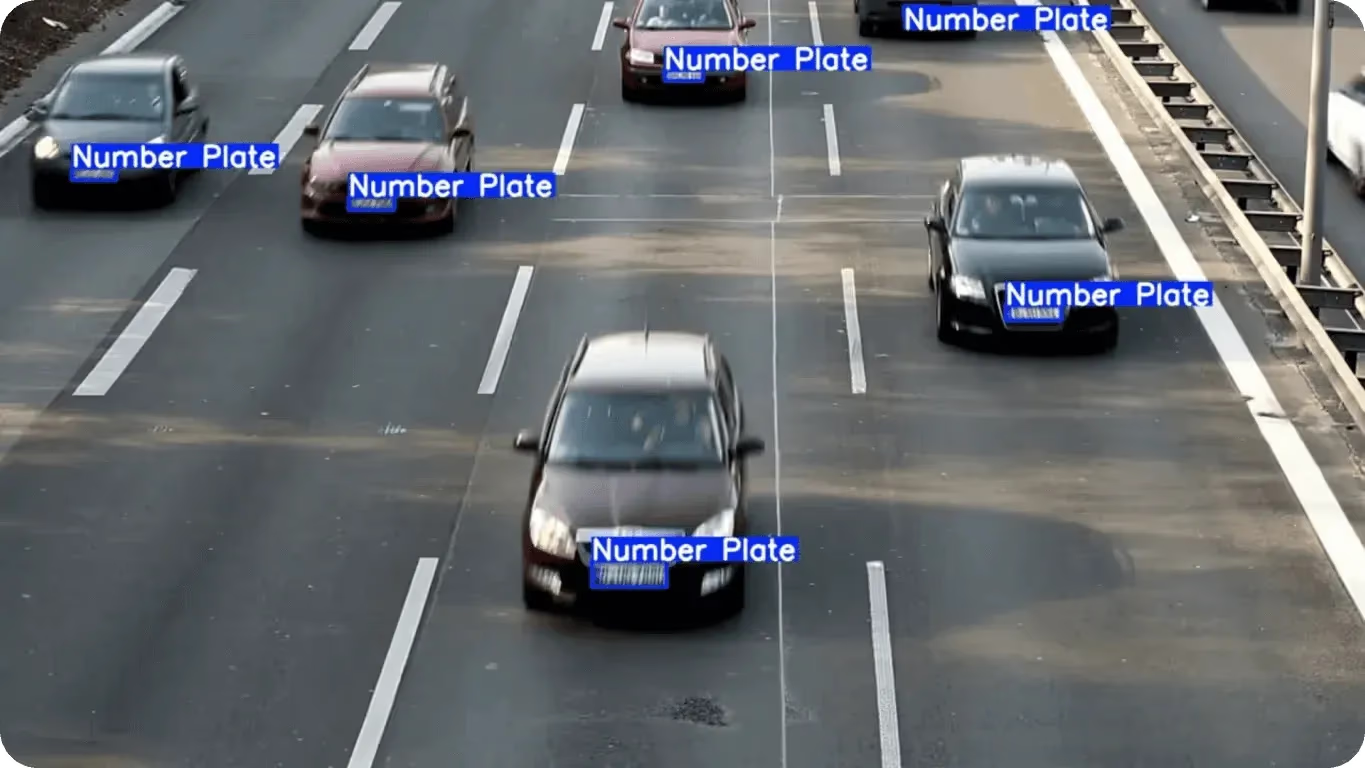
Рис 1. Пример обнаружения объектов. (Источник)
Традиционное object detection необходимо, потому что оно обеспечивает как распознавание (идентификацию того, что является объектом), так и локализацию (определение его точного местоположения на изображении). Эта комбинация позволяет машинам надежно выполнять сложные реальные задачи: от автономных транспортных средств до промышленной автоматизации и диагностики в здравоохранении.
Благодаря технологическим достижениям модели обнаружения объектов продолжают совершенствоваться, становясь быстрее, точнее и лучше приспособленными для реальных условий. В этой статье мы рассмотрим некоторые из лучших моделей обнаружения объектов, доступных сегодня. Давай начнем!
Link to this sectionПотребность в обнаружении объектов#
Computer vision tasks, такие как классификация изображений, можно использовать для определения того, содержит ли изображение автомобиль, человека или другой объект. Однако они не могут определить, где именно находится объект на изображении.
Именно здесь обнаружение объектов может быть очень полезным. Модели обнаружения объектов могут идентифицировать присутствующие объекты, а также точно определить их местоположение. Этот процесс, известный как локализация, позволяет машинам более точно понимать сцены и реагировать соответствующим образом, будь то остановка беспилотного автомобиля, управление рукой робота или выделение области на медицинском снимке.
Развитие глубокого обучения изменило обнаружение объектов. Вместо того чтобы полагаться на жестко запрограммированные правила, современные модели изучают закономерности непосредственно из аннотаций и визуальных данных. Эти наборы данных учат модели тому, как выглядят объекты, где они обычно появляются и как справляться с такими трудностями, как маленькие объекты, загроможденные сцены или меняющиеся условия освещения.
На самом деле, современные системы обнаружения объектов могут точно обнаруживать несколько объектов одновременно. Это делает обнаружение объектов важнейшей технологией в таких областях, как автономное вождение, робототехника, здравоохранение и промышленная автоматизация.
Link to this sectionКак работают задачи обнаружения объектов#
Входными данными для модели обнаружения объектов является изображение, которое может поступить с камеры, видеокадра или даже медицинского сканирования. Изображение обрабатывается через нейронную сеть, обычно сверточную нейронную сеть (CNN), обученную распознавать закономерности в визуальных данных.
Внутри сети изображение анализируется поэтапно. На основе обнаруженных признаков модель предсказывает, какие объекты присутствуют и где они находятся.
Эти предсказания представляются с использованием ограничивающих рамок (bounding boxes) — прямоугольников, нарисованных вокруг каждого обнаруженного объекта. Для каждой такой рамки модель присваивает метку класса (например, автомобиль, человек или собака) и показатель уверенности, указывающий на степень уверенности в предсказании (это также можно рассматривать как вероятность).
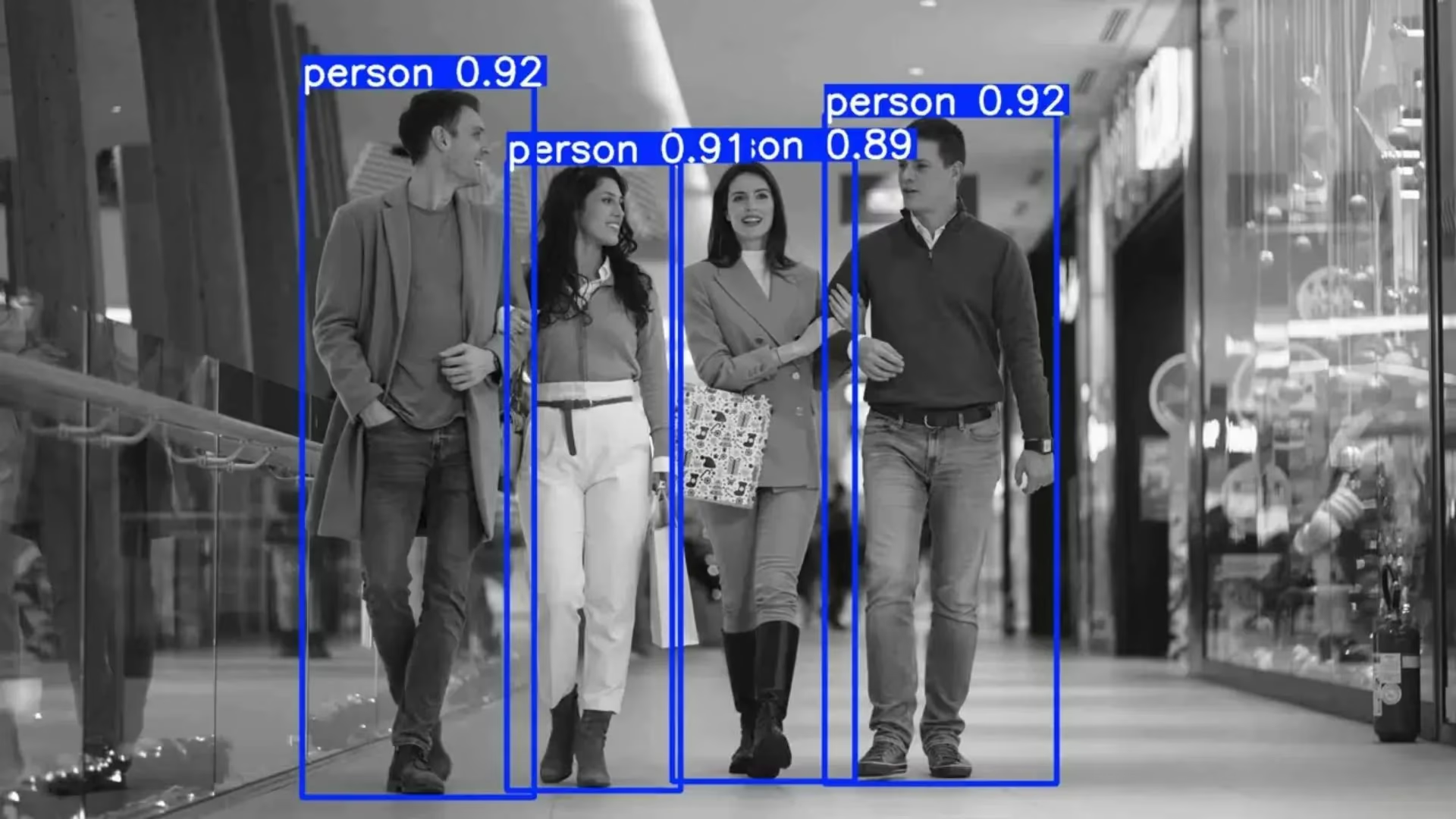
Рис 2. Предсказания обнаружения объектов можно визуализировать с помощью ограничивающих рамок.
Весь процесс в значительной степени опирается на извлечение признаков. Модель учится идентифицировать полезные визуальные паттерны, такие как края, формы, текстуры и другие отличительные характеристики. Эти паттерны кодируются в картах признаков, которые помогают сети понимать изображение на разных уровнях детализации.
Link to this sectionОбнаружение объектов: двухэтапные и одноэтапные методы#
В зависимости от архитектуры модели детекторы используют разные стратегии поиска объектов, балансируя между скоростью, точностью и сложностью.
Многие модели, особенно двухэтапные детекторы, такие как Faster R-CNN, фокусируются на определенных частях изображения, называемых областями интереса (ROI). Концентрируясь на этих областях, модель отдает приоритет регионам, в которых с большей вероятностью содержатся объекты, вместо того чтобы анализировать каждый пиксель одинаково.
С другой стороны, одноэтапные модели, такие как ранние версии YOLO, не выбирают конкретные ROI, как двухэтапные модели. Вместо этого они делят изображение на сетку и используют предопределенные рамки, называемые anchor boxes, вместе с картами признаков для предсказания объектов на всем изображении за один проход.
Сегодня передовые модели обнаружения объектов исследуют подходы без использования анкоров (anchor-free). В отличие от традиционных одноэтапных моделей, которые полагаются на предопределенные anchor boxes, anchor-free модели предсказывают местоположение и размер объектов непосредственно из карт признаков. Это может упростить архитектуру, снизить вычислительные затраты и повысить производительность, особенно при обнаружении объектов разной формы и размера.
Link to this sectionОбзор лучших моделей обнаружения объектов#
Сегодня существует множество моделей обнаружения объектов, каждая из которых разработана с учетом конкретных целей. Некоторые оптимизированы для работы в реальном времени, другие фокусируются на достижении максимальной точности. Выбор правильной модели для решения задачи компьютерного зрения часто зависит от твоего конкретного случая использования и требований к производительности.
Давай теперь рассмотрим некоторые из лучших моделей обнаружения объектов 2026 года.
Link to this sectionМодели Ultralytics YOLO#
Одним из наиболее широко используемых семейств моделей обнаружения объектов сегодня является семейство Ultralytics YOLO. YOLO, что расшифровывается как You Only Look Once, популярно во многих отраслях, потому что обеспечивает высокую производительность обнаружения, будучи при этом быстрым, надежным и удобным в работе.
Семейство Ultralytics YOLO включает Ultralytics YOLOv5, Ultralytics YOLOv8, Ultralytics YOLO11 и готовящуюся к выпуску Ultralytics YOLO26, предлагая ряд вариантов для различных требований к производительности и задачам. Благодаря легкому дизайну и оптимизации скорости, модели Ultralytics YOLO идеально подходят для обнаружения в реальном времени и могут быть развернуты на граничных устройствах с ограниченными вычислительными ресурсами и памятью.
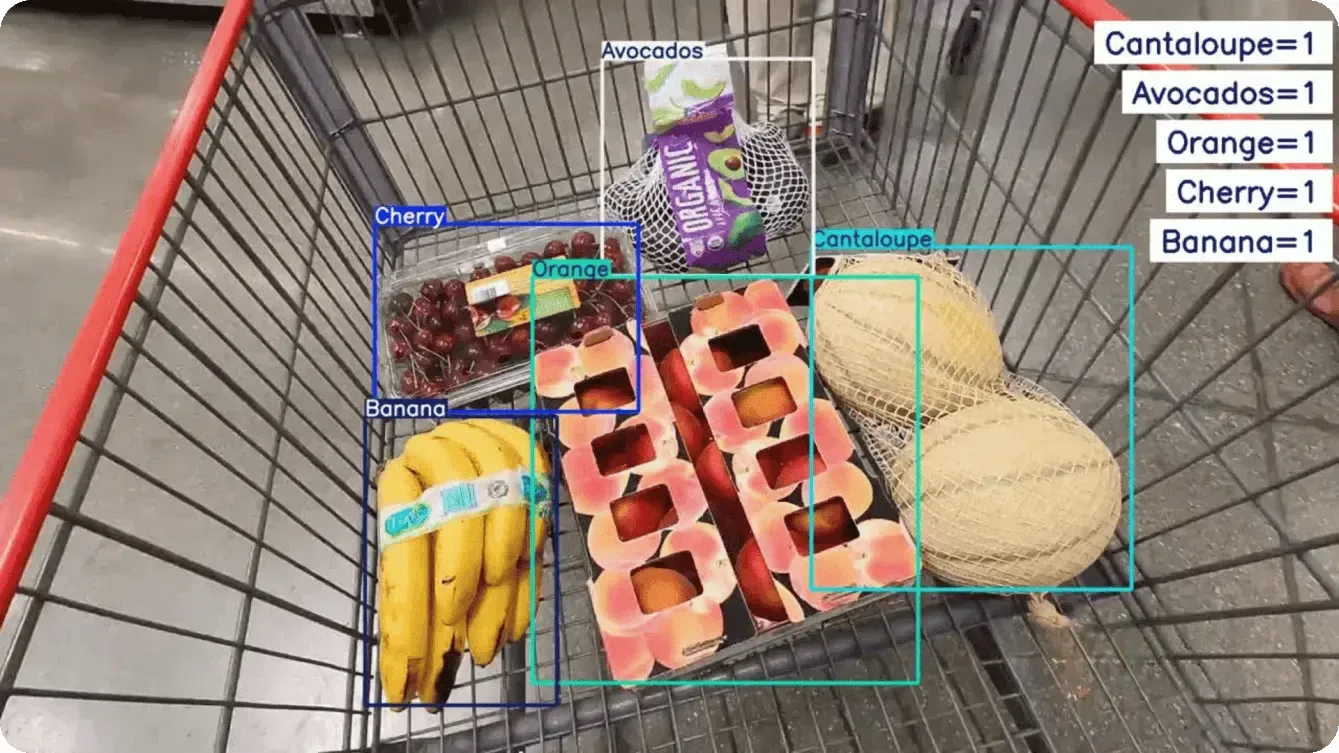
Рис 3. Использование Ultralytics YOLO11 для обнаружения объектов (Источник)
Помимо базового обнаружения объектов, эти модели очень универсальны. Они также поддерживают такие задачи, как сегментация экземпляров, которая очерчивает объекты на уровне пикселей, и оценка позы, которая идентифицирует ключевые точки на людях или объектах. Эта гибкость делает модели Ultralytics YOLO отличным выбором для широкого спектра приложений: от сельского хозяйства и логистики до розничной торговли и производства.
Еще одной ключевой причиной популярности моделей Ultralytics YOLO является Ultralytics Python package, который предоставляет простой и удобный интерфейс для обучения, донастройки и развертывания моделей. Ты можешь начать с предобученных весов, настроить модели под свои собственные наборы данных и развернуть их всего за несколько строк кода.
Link to this sectionRT-DETR и RT-DETRv2#
RT‑DETR (Real-Time Detection Transformer) и более новая RT‑DETRv2 — это модели обнаружения объектов, созданные для работы в реальном времени. В отличие от многих традиционных моделей, они могут принимать изображение и выдавать итоговые результаты обнаружения напрямую, без использования подавления немаксимумов (NMS).
NMS — это шаг, который удаляет лишние перекрывающиеся рамки, когда модель предсказывает один и тот же объект несколько раз. Пропуск NMS делает процесс обнаружения проще и быстрее.
Эти модели сочетают CNN с трансформерами. CNN находит визуальные детали, такие как края и формы, в то время как трансформер — это тип нейронной сети, который может смотреть на все изображение целиком и понимать, как разные части связаны друг с другом. Это всестороннее понимание позволяет модели обнаруживать объекты, которые находятся близко друг к другу или перекрываются.
RT‑DETRv2 улучшает оригинальную модель такими функциями, как многомасштабное обнаружение, которое помогает находить как маленькие, так и большие объекты, а также лучше справляется со сложными сценами. Эти изменения позволяют модели оставаться быстрой, повышая при этом точность.
Link to this sectionRF-DETR#
RF‑DETR — это основанная на трансформерах модель реального времени, разработанная для сочетания точности трансформерных архитектур со скоростью, необходимой для реальных приложений. Как и RT‑DETR и RT‑DETRv2, она использует трансформер для анализа всего изображения и CNN для извлечения тонких визуальных признаков, таких как края, формы и текстуры.
Модель предсказывает объекты непосредственно из входного изображения, пропуская anchor boxes и NMS, что упрощает процесс обнаружения и сохраняет высокую скорость вывода. RF‑DETR также поддерживает сегментацию экземпляров, позволяя очерчивать объекты на уровне пикселей в дополнение к предсказанию ограничивающих рамок.
Link to this sectionEfficientDet#
Выпущенная в конце 2019 года, EfficientDet — это модель обнаружения объектов, разработанная для эффективного масштабирования и высокой производительности. Что выделяет EfficientDet, так это составное масштабирование — метод, который масштабирует разрешение входа, глубину сети и ширину сети одновременно, а не регулирует только один фактор. Этот подход помогает модели поддерживать стабильную точность независимо от того, масштабируется ли она для высокопроизводительных задач или для легких развертываний.
Еще одним ключевым компонентом EfficientDet является эффективная пирамидальная сеть признаков (FPN), которая позволяет модели анализировать изображения в нескольких масштабах. Этот многомасштабный анализ критически важен для обнаружения объектов разных размеров, что позволяет EfficientDet надежно идентифицировать как маленькие, так и большие объекты на одном изображении.
Link to this sectionPP-YOLOE+#
Выпущенная в 2022 году, PP-YOLOE+ — это модель обнаружения объектов в стиле YOLO, что означает, что она обнаруживает и классифицирует объекты за один проход по изображению. Этот подход делает ее быстрой и подходящей для приложений реального времени, сохраняя при этом высокую точность.
Одним из ключевых улучшений в PP-YOLOE+ является обучение с согласованием задач (task-aligned learning), которое помогает показателям уверенности модели отражать точность локализации объектов. Это особенно полезно для обнаружения маленьких или перекрывающихся объектов.
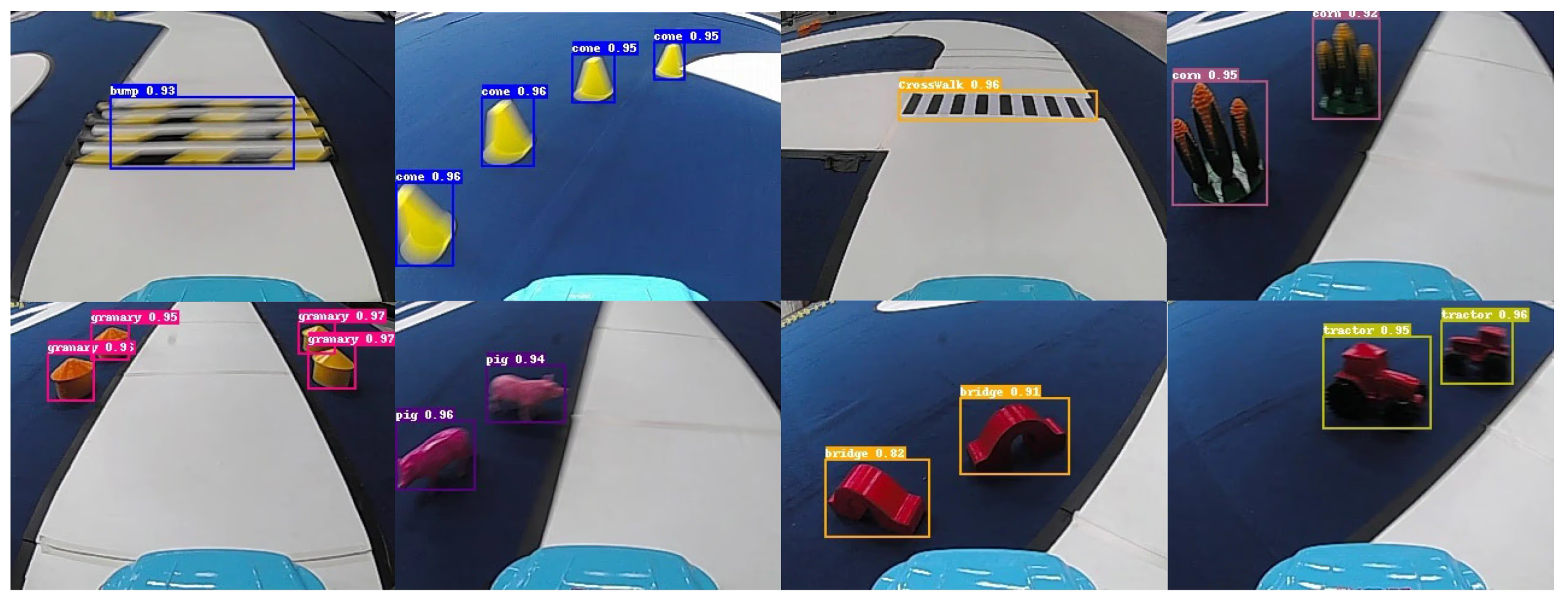
Рис 4. Обнаружение объектов с помощью PP-YOLOE+ (Источник)
Модель также использует архитектуру с разделенной головой, которая отделяет задачи предсказания местоположения объекта и меток классов. Это позволяет ей более точно рисовать ограничивающие рамки, правильно классифицируя объекты.
Link to this sectionGroundingDINO#
GroundingDINO — это трансформерная модель обнаружения объектов, объединяющая зрение и язык. Вместо того чтобы полагаться на фиксированный набор категорий, она позволяет пользователям обнаруживать объекты с помощью текстовых подсказок на естественном языке.
Сопоставляя визуальные признаки с изображения с текстовыми описаниями, модель может находить объекты, даже если этих точных меток не было в обучающих данных. Это означает, что ты можешь дать модели подсказку вроде «человек в каске» или «красная машина рядом со зданием», и она создаст точные ограничивающие рамки вокруг соответствующих объектов.
Кроме того, благодаря поддержке обнаружения с нулевым обучением (zero-shot detection), GroundingDINO снижает потребность в переобучении или донастройке модели для каждого нового случая использования, что делает ее очень гибкой для широкого спектра приложений. Это сочетание понимания языка и визуального распознавания открывает новые возможности для интерактивных и адаптивных систем ИИ.
Link to this sectionОбщие метрики, используемые для оценки детекторов объектов#
Когда ты сравниваешь различные модели обнаружения объектов, ты можешь задаться вопросом, как определить, какая из них работает лучше всего. Это хороший вопрос, потому что помимо архитектуры модели и качества данных, на производительность может влиять множество факторов.
Исследователи часто полагаются на общие бенчмарки и стандартные метрики производительности, чтобы последовательно оценивать модели, сравнивать результаты и понимать компромиссы между скоростью и точностью. Стандартные бенчмарки особенно важны, потому что многие модели обнаружения объектов оцениваются на одних и тех же наборах данных, таких как COCO.
Link to this sectionИзмерение точности и скорости обнаружения#
Вот более подробный взгляд на некоторые общие метрики, используемые для оценки моделей обнаружения объектов:
- Intersection over union (IoU): Эта метрика измеряет, насколько предсказанная ограничивающая рамка перекрывается с реальным объектом на изображении. Она сравнивает рамку, нарисованную моделью, с ground-truth рамкой, которая является местоположением объекта согласно разметке в наборе данных. IoU рассчитывается как площадь пересечения, деленная на площадь объединения двух рамок. Более высокий IoU указывает на то, что модель размещает рамку более точно, тогда как более низкий IoU означает, что предсказание менее точно. Проще говоря, IoU показывает, насколько предсказания модели соответствуют реальному местоположению объекта.
- Mean average precision (mAP): Это основная метрика, используемая для оценки общей производительности обнаружения объектов. Она учитывает как количество объектов, которые модель обнаруживает правильно, так и точность этих обнаружений на разных уровнях уверенности и категориях объектов.
- Frames per second (FPS) и задержка: FPS показывает, сколько изображений или видеокадров модель может обработать за одну секунду. Например, модель, работающая на 30 FPS, может обработать 30 кадров в секунду. Более высокий FPS означает, что система может реагировать быстрее, что важно для таких сценариев, как живое видео, мониторинг трафика или робототехника. Задержка, с другой стороны, измеряет, сколько времени требуется модели для обработки одного изображения или кадра с момента его получения до готовности результата.
Link to this sectionПлюсы и минусы использования алгоритмов обнаружения объектов#
Вот некоторые из ключевых преимуществ использования моделей обнаружения объектов в реальных приложениях:
- Масштабируемость по отраслям: Обнаружение объектов можно применять в широком спектре случаев: от мониторинга трафика и аналитики в ритейле до здравоохранения, сельского хозяйства и производства.
- Снижение ручного труда: Автоматизация задач визуального контроля и мониторинга снижает потребность в постоянном контроле со стороны человека и помогает командам сосредоточиться на более ценной работе.
- Преимущества open-source экосистем: Активные сообщества разработчиков open-source и ресурсы на GitHub облегчают доступ к предобученным моделям, проведение экспериментов и адаптацию решений.
Несмотря на эти плюсы, существуют практические ограничения, которые могут повлиять на то, как работают модели обнаружения объектов. Вот некоторые важные факторы, которые стоит учесть:
- Требования к высококачественным данным: Модели обнаружения объектов полагаются на большие, хорошо размеченные наборы данных для обучения. Создание и поддержание таких данных может быть трудоемким, дорогостоящим и сложным процессом для масштабирования.
- Вычислительные требования: Модели, обеспечивающие более высокую точность обнаружения, часто требуют значительной вычислительной мощности как во время обучения, так и при развертывании в реальном времени. Это обычно означает использование высокопроизводительных GPU, что может увеличить расходы на инфраструктуру.
- Чувствительность к реальным условиям: Изменения освещения, углов камеры, погоды и загроможденные сцены могут повлиять на производительность обнаружения, поэтому необходимо постоянное тестирование и настройка.
Link to this sectionОсновные выводы#
Лучшая модель обнаружения объектов для твоего проекта компьютерного зрения зависит от случая использования, настройки данных, требований к производительности и аппаратных ограничений. Некоторые модели оптимизированы для скорости, другие фокусируются на точности, и большинству реальных приложений требуется баланс того и другого. Благодаря open-source фреймворкам и активным сообществам на GitHub, эти модели становится проще оценивать, адаптировать и развертывать для практического использования.
Чтобы узнать больше, изучи наш GitHub repository. Присоединяйся к нашему community и загляни на страницы наших решений, чтобы прочитать о таких приложениях, как AI в здравоохранении и компьютерное зрение в автомобильной промышленности. Ознакомься с нашими вариантами лицензирования, чтобы начать работу с визуальным ИИ уже сегодня.






