Детекция дорожного движения ночью: почему точность имеет значение
Узнай, что делает детекцию ночного дорожного движения сложной задачей — от плохой видимости до бликов, и как компьютерное зрение повышает безопасность и улучшает транспортный поток.

Дороги ночью выглядят иначе не только для водителей, но и для систем, отвечающих за их безопасность. Плохая видимость, блики фар и быстро движущиеся отражения могут сделать обнаружение транспортных средств в ночное время более сложной задачей.
Традиционные методы, такие как визуальное наблюдение или камеры с датчиками движения, в основном полагаются на человеческое суждение и простые сигналы движения. Это может быть ненадежно в условиях низкой освещенности или сложной дорожной обстановки. Такие методы могут ошибочно идентифицировать транспортные средства или пешеходов, что приводит к ложным срабатываниям или пропущенным событиям.

Рис. 1. Пример плохо освещенной дороги ночью (Источник)
Искусственный интеллект (ИИ), глубокое обучение и computer vision помогают решить эту проблему за счет автоматизации обнаружения и распознавания транспортных средств. В частности, computer vision — это отрасль ИИ, которая позволяет машинам видеть и интерпретировать визуальные данные. Что касается обнаружения транспортных средств на видео в ночное время, модели vision AI могут выйти за рамки простого анализа яркости или движения, обучаясь распознаванию сложных закономерностей, что повышает точность.
Например, модели computer vision, такие как Ultralytics YOLO26 и Ultralytics YOLO11, известны своей скоростью и точностью. Они способны обрабатывать видео и изображения в режиме реального времени, обнаруживая и классифицируя несколько объектов в кадре, а также отслеживая их на протяжении всей последовательности.
Эти возможности реализуются благодаря различным задачам компьютерного зрения, таким как обнаружение объектов и сегментация экземпляров, даже когда свет фар, тени или перекрывающиеся транспортные средства затрудняют обнаружение. Это позволяет модели идентифицировать, классифицировать и различать объекты.
В этой статье мы изучим проблемы ночного мониторинга дорожного движения, узнаем, как computer vision помогает их решить, и где vision AI уже применяется в реальных системах контроля трафика. Давай начнем!
Link to this sectionПроблемы обнаружения в ночное время#
Прежде чем изучать, как computer vision решает проблемы обнаружения транспортных средств ночью, давай посмотрим, почему это так сложно. Вот несколько факторов, которые стоит учесть:
-
Низкая видимость: Ограниченное освещение и плохие условия освещенности затрудняют получение камерами четких и детализированных кадров. При снижении качества изображения транспортные средства могут сливаться с фоном или вовсе неверно идентифицироваться.
-
Погодные условия: Дождь, туман, дымка или даже пыль могут дополнительно ухудшить качество видео. Эти условия усложняют задачам обнаружения отделение транспортных средств от окружающей среды.
-
Фары и задние фонари: Яркие лучи и отражения могут перегружать камеры. Это может создавать ложное обнаружение транспортных средств, когда световые пятна принимаются за автомобили, сбивая с толку алгоритмы и снижая точность.
-
Перекрытие транспортных средств (окклюзия): В условиях интенсивного движения автомобили могут быть частично или полностью скрыты другими транспортными средствами. Окклюзия усложняет отслеживание, подсчет и классификацию, особенно когда несколько участников дорожного движения перекрывают друг друга в одном кадре.
Link to this sectionНеобходимость в ночных эталонных наборах данных и метриках#
Computer vision модели обучаются с использованием больших коллекций изображений, называемых наборами данных. Эти данные тщательно размечаются с указанием содержащихся в них объектов, таких как автомобили, грузовики, пешеходы и велосипеды, и служат основой для обучения. Изучая эти размеченные примеры, модель учится распознавать паттерны, что позволяет ей идентифицировать и обнаруживать объекты на новых видеозаписях.

Рис. 2. Использование computer vision для обнаружения транспортных средств и пешеходов в потоке (Источник)
Во время обучения модель извлекает признаки из данных и использует их для повышения точности обнаружения. Этот процесс помогает сократить количество пропущенных обнаружений и ложных тревог, когда модель сталкивается с реальными дорожными сценами.
Однако создание datasets или коллекций данных для ночных условий — гораздо более сложная задача. Низкое качество видео делает разметку трудоемкой и подверженной ошибкам. Кроме того, редкие, но важные события, такие как аварии или необычное поведение водителей, трудно зафиксировать в ночное время. Это приводит к ограниченному количеству обучающих примеров, на которых модель может учиться.
Чтобы решить эту проблему, исследователи разработали специализированные эталонные наборы данных (бенчмарки). Эталонный набор данных — это не просто коллекция изображений. Он включает стандартизированную разметку, протоколы оценки и метрики производительности, такие как precision, recall и mAP. Эти метрики позволяют тестировать и сравнивать различные алгоритмы в одинаковых условиях, обеспечивая честную и последовательную оценку.
Например, бенчмарк ExDark содержит 7363 изображения при низкой освещенности в 12 категориях объектов (велосипед, лодка, бутылка, автобус, автомобиль, кошка, стул, чашка, собака, мотоцикл, люди, стол). Каждое изображение снабжено bbox, и этот набор данных широко используется в исследованиях для оценки обнаружения и классификации объектов при плохом освещении.
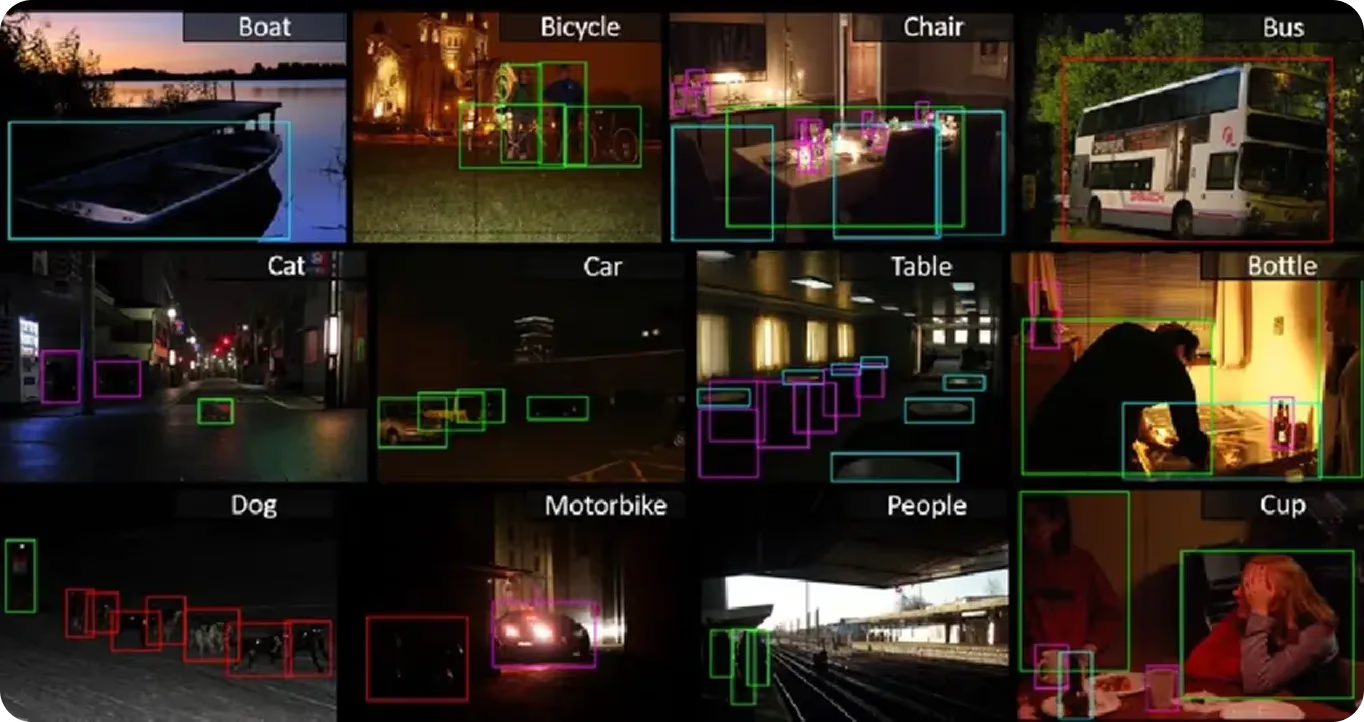
Рис. 3. Обзор набора данных ExDark (Источник)
Аналогично, бенчмарк NightOwls предоставляет около 115 000 ночных изображений с примерно 279 000 аннотаций пешеходов. Он стал ключевым ресурсом для оценки систем обнаружения пешеходов, которые играют жизненно важную роль в безопасности дорожного движения и системах помощи водителю (ADAS).
Link to this sectionКак computer vision помогает в обнаружении транспортных средств на видео в ночное время#
Теперь, когда у нас есть лучшее понимание проблем и потребности в данных, давай подробнее рассмотрим, как системы на основе компьютерного зрения могут интерпретировать ночные видео с дорог.
Модели вроде YOLO11 и YOLO26 поддерживают computer vision задачи, такие как обнаружение объектов, отслеживание и сегментация экземпляров, что позволяет анализировать дорожную ситуацию даже в условиях низкой освещенности. Вот обзор задач vision AI, которые поддерживают эти модели для анализа ночного трафика:
- Обнаружение объектов (Object detection): Эта задача используется для идентификации и локализации автомобилей, пешеходов, велосипедов и других участников дорожного движения в каждом кадре, обычно путем рисования bbox вокруг них.
- Отслеживание объектов (Object tracking): Помогает сопровождать обнаруженные объекты между кадрами, позволяя распознавать один и тот же автомобиль или пешехода с течением времени, что дает возможность оценивать скорость движения и контролировать транспортный поток.
- Сегментация экземпляров (Instance segmentation): Позволяет различать отдельные объекты, даже когда они перекрываются, предоставляя детализацию на уровне пикселей, что повышает точность в сложных ночных условиях.
- Классификация изображений (Image classification): Эта задача присваивает всему изображению или обнаруженному объекту предопределенную категорию, например, автомобиль, автобус, грузовик или мотоцикл.
- Обнаружение ориентированных bbox (OBB): Фиксирует точный угол и ориентацию объекта, повышая точность, когда транспортные средства появляются по диагонали или в необычных положениях при ночном трафике.
Link to this sectionИспользование моделей Ultralytics YOLO для ночного мониторинга#
Мы обсудили обучение моделей, необходимость наборов данных и задачи, поддерживаемые моделями вроде YOLO11 и YOLO26. Но чтобы объединить все это, есть еще одна концепция: как эти модели применяются для ночного мониторинга на практике.
Модели Ultralytics YOLO доступны как предобученные версии, что означает, что они уже были обучены на больших универсальных наборах данных, таких как COCO dataset, охватывающих множество повседневных объектов. Это дает модели сильную базовую способность обнаруживать и классифицировать объекты.
Однако, поскольку эти наборы данных содержат очень мало примеров при низкой освещенности или ночью, предобученные модели не очень эффективно справляются с бликами, тенями или плохим контрастом. Чтобы сделать их эффективными для обнаружения на видео в ночное время, их необходимо дообучать на специализированных наборах данных, отражающих реальные ночные условия.
Fine-tuning или custom training включает обучение модели на дополнительных размеченных изображениях, снятых в условиях низкой освещенности, таких как транспортные средства в свете фар, пешеходы на переходах или оживленные перекрестки ночью, чтобы она изучила уникальные особенности ночных сцен.
После custom training модель может поддерживать такие задачи, как обнаружение, отслеживание, сегментация или классификация, с гораздо более высокой точностью в условиях низкой освещенности. Это позволяет транспортным властям применять такие модели для практических целей, таких как подсчет транспортных средств, оценка скорости, адаптивное управление сигналами и предотвращение аварий ночью.
Link to this sectionПриложения Vision AI для обнаружения транспортных средств на видео в ночное время#
Далее давай посмотрим, как computer vision внедряется в реальные ночные дорожные системы.
Link to this sectionУмные светофоры могут поддержать планирование умных городов#
Городские перекрестки — одни из самых сложных зон для управления, особенно ночью, когда видимость падает, а транспортный поток становится менее предсказуемым. Традиционные светофоры полагаются на фиксированные таймеры, которые не могут реагировать на изменения в режиме реального времени. Исследования показывают, что это не только тратит время водителей, но и приводит к ненужному расходу топлива и задержкам.
Именно здесь системы computer vision могут помочь преодолеть эту проблему. Эти системы способны отслеживать перемещения транспортных средств и подсчитывать их количество в режиме реального времени. Данные затем передаются в адаптивные системы управления трафиком. Это позволяет светофорам быстро реагировать на реальную ситуацию на дороге. Так что, если одна полоса перегружена, а другая пуста, тайминг светофора можно мгновенно настроить для ликвидации заторов.
Link to this sectionПредотвращение аварий#
Вождение ночью рискованнее, чем днем, из-за сниженной видимости, неравномерного освещения и бликов, что затрудняет оценку расстояний водителями. Исследования показывают, что частота смертельных ДТП на километр пути ночью может быть в три раза выше, чем днем.
Традиционные методы мониторинга, такие как стационарные камеры наблюдения, дорожные патрули, датчики присутствия и светофоры с фиксированным временем работы, действуют реактивно и могут не заметить опасные ситуации достаточно рано, чтобы предотвратить их.
Computer vision решения решают эту задачу, анализируя потоки видео в реальном времени и обнаруживая необычные паттерны на дороге или автомагистрали. Используя отслеживание объектов, эти системы могут отслеживать поведение транспортных средств и подавать сигналы тревоги, когда что-то кажется аномальным.
Например, если движущийся автомобиль перестраивается, едет слишком быстро в перегруженной зоне или внезапно замедляется, система может отметить это в режиме реального времени. Это означает, что власти могут отреагировать быстро и предотвратить аварии до того, как они произойдут.
Link to this sectionАвтономное вождение и ADAS#
Для автономных транспортных средств и ADAS ночное вождение несет свои вызовы. Низкая видимость и непредсказуемые паттерны движения усложняют надежную работу традиционных датчиков, что вызывает вопросы безопасности.
Computer vision улучшает эти системы, беря на себя задачи обнаружения объектов, отслеживания полос и сегментации, позволяя автомобилям распознавать пешеходов, другие машины и препятствия даже при плохом освещении. В сочетании с радаром или LiDAR (Light Detection and Ranging), которые создают 3D-карту окружения, дополнительный визуальный слой помогает ADAS предоставлять ранние предупреждения и дает автономным автомобилям осведомленность, необходимую для более безопасного передвижения ночью.

Рис. 4. Кадры с дорог в дневное и ночное время (Источник)
Link to this sectionПравоохранительные органы и выявление нарушений#
Превышение скорости является причиной одной из трех смертей на дорогах во всем мире, и риск только возрастает ночью. Темнота затрудняет поимку нарушителей для полиции, так как детали, четкие днем, часто размываются в темноте.
Именно поэтому такие нарушения, как превышение скорости на пустых дорогах, проезд на красный свет или выезд на чужую полосу, часто остаются безнаказанными. Computer vision решает эту проблему с помощью инфракрасных камер, которые замечают нарушения даже при слабом свете. Эти системы создают зоны обнаружения, где фиксируются инциденты, снижая количество ложных срабатываний и предоставляя четкие проверяемые доказательства. Для транспортных властей это означает меньше слепых зон и меньшую зависимость от ручных проверок.
Link to this sectionПлюсы и минусы обнаружения на видео в ночное время#
Вот некоторые преимущества использования vision AI для ночного обнаружения на дорогах.
- Масштабируемость: После дообучения модели могут быть развернуты на многих камерах или перекрестках, обеспечивая мониторинг в масштабах всего города.
- Предиктивная аналитика: Исторические данные с камер могут использоваться для прогнозирования заторов и зон, склонных к авариям, поддерживая профилактические меры.
- Оптимизация ресурсов: Предоставляет властям инсайты в реальном времени, помогая более эффективно распределять дорожные патрули и службы экстренной помощи.
Несмотря на преимущества, ночное обнаружение с помощью vision AI имеет и свои ограничения. Вот несколько факторов, которые стоит учитывать:
-
Зависимость от данных: Точность систем vision AI сильно зависит от доступа к большим high-quality datasets, охватывающим широкий спектр ночных условий.
-
Экологические факторы: Погодные условия, такие как дождь, туман или дымка, а также практические проблемы, вроде грязных или смещенных линз камер, могут снизить производительность и требуют регулярного обслуживания.
-
Аппаратные требования: Запуск продвинутых моделей ИИ часто требует высокопроизводительных GPU или специализированных edge-устройств, что может сделать крупномасштабное развертывание дорогим и сложным.
Link to this sectionБудущее интеллектуальных транспортных систем в ночное время#
По мере роста городов и увеличения интенсивности движения системы ночного обнаружения становятся все более интеллектуальными и отзывчивыми. Например, тепловизоры и инфракрасные датчики могут обнаруживать тепловые сигнатуры людей и транспортных средств, что позволяет «видеть» даже в полной темноте. Это снижает ошибки, возникающие, когда стандартные камеры не справляются с бликами или низким освещением.

Рис. 5. Технология ночного видения улучшает обнаружение пешеходов ночью (Источник)
Еще один растущий подход — camera-LiDAR fusion. Камеры предоставляют детальные изображения дороги, а LiDAR создает точную 3D-карту. Используемые вместе, они повышают точность обнаружения полос, транспортных средств и препятствий, особенно при слабом свете или умеренном тумане.
В то же время достижения в области улучшения изображений при низкой освещенности, распознавания пешеходов и идентификации номерных знаков расширяют возможности computer vision. Благодаря этим улучшениям даже плохо освещенные дороги и перекрестки могут контролироваться с большей надежностью и меньшим количеством ошибок.
Link to this sectionОсновные выводы#
Обнаружение транспортных средств ночью всегда было сложной задачей для мониторинга, но computer vision делает ее более управляемой. Снижая влияние бликов и справляясь со сложными дорожными сценами, он обеспечивает более точную картину того, как ведут себя дороги в темное время суток. По мере развития этих систем они прокладывают путь к более безопасным, умным и эффективным перевозкам ночью.
Готов интегрировать vision AI в свои проекты? Присоединяйся к нашему активному сообществу и узнавай об инновациях, таких как ИИ в автомобильной индустрии и vision AI в робототехнике. Загляни в наш GitHub репозиторий, чтобы узнать больше. Чтобы начать работу с computer vision уже сегодня, изучи наши варианты лицензирования.






