Ultralytics YOLO11'in çapraz (anchor-free) bir dedektör olmasının avantajları
Ultralytics YOLO11'in çapraz (anchor-free) nesne algılamayı nasıl desteklediğini ve bu model mimarisinin çeşitli uygulamalara getirdiği avantajları anla.

Görüntüleme Yapay Zekası modellerinin geçmişine bakarsak, bir görüntü veya video içindeki nesneleri tanımlamayı ve konumlandırmayı içeren temel bir bilgisayarlı görü görevi olan nesne tespiti kavramının 1960'lardan beri var olduğunu görürüz. Ancak, günümüzdeki çığır açan yeniliklerde bu kadar önemli olmasının temel nedeni, nesne tespiti tekniklerinin ve model mimarilerinin o zamandan bu yana hızla ilerleyip gelişmesidir.
Önceki bir makalemizde, nesne tespitinin evrimini ve Ultralytics YOLO modellerine giden yolu ele almıştık. Bugün, bu yolculuktaki daha spesifik bir dönüm noktasını keşfetmeye odaklanacağız: çapa tabanlı (anchor-based) dedektörlerden çapasız (anchor-free) dedektörlere geçiş.
Çapa tabanlı dedektörler, nesnelerin görüntüde nerede olduğunu tahmin etmek için "çapa" (anchor) adı verilen önceden tanımlanmış kutulara güvenirler. Buna karşılık, çapasız dedektörler bu önceden tanımlanmış kutuları atlar ve bunun yerine nesne konumlarını doğrudan tahmin ederler.
Bu değişim basit ve mantıksal bir değişiklik gibi görünse de, aslında nesne tespiti doğruluğunda ve verimliliğinde büyük iyileşmelere yol açtı. Bu makalede, çapasız dedektörlerin Ultralytics YOLO11 gibi gelişmelerle bilgisayarlı görü dünyasını nasıl yeniden şekillendirdiğini anlayacağız.
Link to this sectionÇapa tabanlı dedektörler nelerdir?#
Çapa tabanlı dedektörler, bir görüntüdeki nesnelerin yerini belirlemeye yardımcı olmak için çapa olarak bilinen önceden tanımlanmış kutuları kullanır. Bu çapaları, görüntünün üzerine yerleştirilmiş farklı boyut ve şekillerdeki bir kutu ızgarası olarak düşünebilirsin. Model daha sonra bu kutuları, tespit ettiği nesnelere uyacak şekilde ayarlar. Örneğin, model bir araba tanımlarsa, arabanın konumuna ve boyutuna daha doğru uyum sağlamak için çapa kutusunu değiştirir.
Her çapa görüntüdeki olası bir nesneyle ilişkilendirilir ve eğitim sırasında model, çapa kutularını nesnenin konumuna, boyutuna ve en-boy oranına daha iyi uyacak şekilde nasıl değiştireceğini öğrenir. Bu, modelin nesneleri farklı ölçeklerde ve yönlerde tespit etmesini sağlar. Ancak, doğru çapa kutusu setini seçmek zaman alıcı olabilir ve bunları hassas ayarlama süreci hatalara açık olabilir.
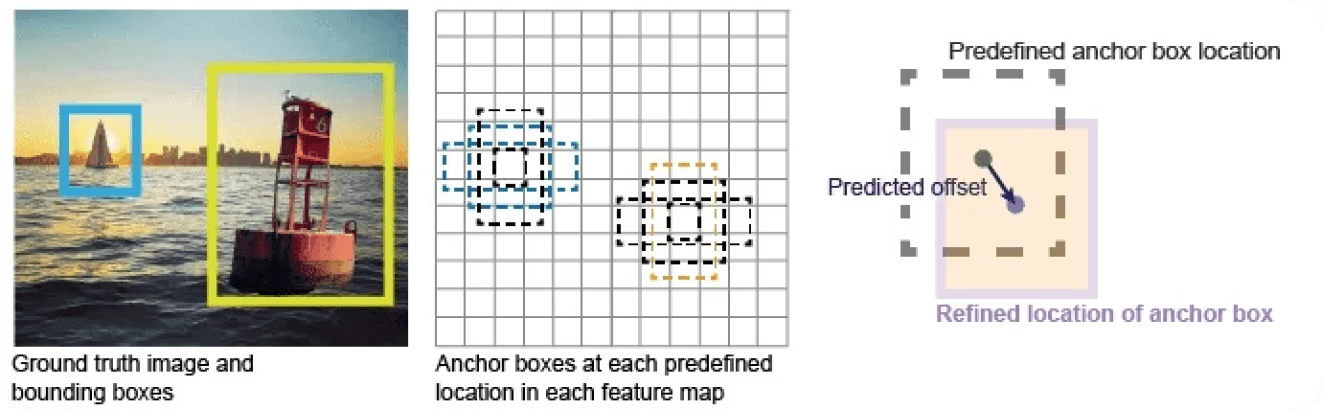
Şekil 1. Çapa Kutusu Nedir?
YOLOv4 gibi çapa tabanlı dedektörler birçok uygulamada iyi çalışsa da, bazı dezavantajları vardır. Örneğin, çapa kutuları her zaman farklı şekil veya boyuttaki nesnelerle tam olarak hizalanmaz, bu da modelin küçük veya düzensiz şekilli nesneleri tespit etmesini zorlaştırır. Çapa kutusu boyutlarını seçme ve hassas ayarlama süreci de zaman alıcı olabilir ve çok fazla manuel çaba gerektirir. Bunun yanı sıra, çapa tabanlı modeller genellikle önceden tanımlanmış kutular bu daha karmaşık senaryolara iyi uyum sağlayamayabileceği için örtülü veya üst üste binen nesneleri tespit etmekte zorlanır.
Link to this sectionÇapasız nesne tespitine geçiş#
Çapasız dedektörler, 2018 yılında CornerNet ve CenterNet gibi modellerle dikkat çekmeye başladı. Bu modeller, önceden tanımlanmış çapa kutularına olan ihtiyacı ortadan kaldırarak nesne tespitine yeni bir yaklaşım getirdi. Nesnelerin nerede olduğunu tahmin etmek için farklı boyut ve şekillerdeki çapa kutularına güvenen geleneksel modellerin aksine, çapasız modeller nesnelerin konumlarını doğrudan tahmin eder. Bu modeller, tespit sürecini basitleştiren ve daha hızlı ve doğru hale getiren merkez gibi nesnenin anahtar noktalarına veya özelliklerine odaklanır.
Çapasız modellerin genel olarak nasıl çalıştığı aşağıdadır:
- Anahtar nokta tespiti: Bazı modeller, önceden tanımlanmış kutular kullanmak yerine merkez veya belirli köşeler gibi bir nesne üzerindeki önemli noktaları tanımlar. Bu anahtar noktalar, modellerin nesnenin nerede olduğunu ve ne kadar büyük olduğunu anlamasına yardımcı olur.
- Merkez tahmini: Bazı modeller bir nesnenin merkezini tahmin etmeye odaklanır. Merkez belirlendiğinde, model oradan tüm nesnenin boyutunu ve konumunu tahmin edebilir.
- Isı haritası regresyonu: Birçok çapasız model, her pikselin bir nesnenin olası konumunu temsil ettiği ısı haritalarını kullanır. Daha güçlü ısı haritası değerleri, o noktada bir nesnenin bulunduğuna dair daha yüksek güveni gösterir.
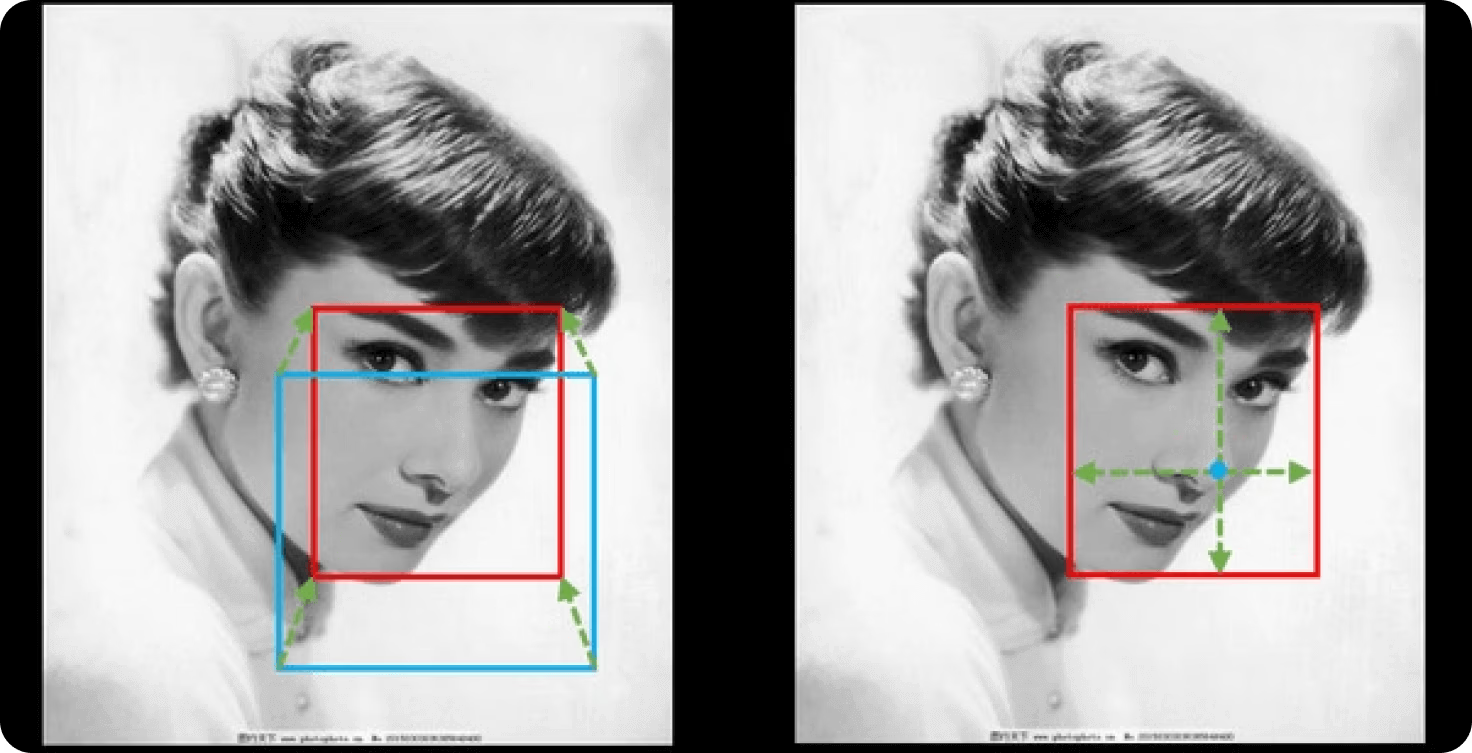
Şekil 2. Çapa Tabanlı Tespit ile Çapasız Tespit.
Çapasız modeller çapa kutularına dayanmadığı için daha basit bir tasarıma sahiptir. Bu, hesaplama açısından daha verimli oldukları anlamına gelir. Birden fazla çapa kutusunu işlemek zorunda olmadıkları için nesneleri daha hızlı tespit edebilirler; bu da otonom sürüş ve video gözetimi gibi gerçek zamanlı uygulamalarda önemli bir avantajdır.
Çapasız modeller ayrıca küçük, düzensiz veya örtülü nesneleri işleme konusunda çok daha iyidir. Çapa kutularına uydurmaya çalışmak yerine anahtar noktaları tespit etmeye odaklandıkları için çok daha esnektirler. Bu, çapa tabanlı modellerin başarısız olabileceği karmaşık veya karmaşık ortamlarda nesneleri doğru bir şekilde tespit etmelerini sağlar.
Link to this sectionUltralytics YOLO11: Çapasız bir dedektör#
Başlangıçta hız ve verimlilik için tasarlanan YOLO modelleri, kademeli olarak çapa tabanlı yöntemlerden çapasız tespite geçti ve YOLO11 gibi modelleri daha hızlı, daha esnek ve çok çeşitli gerçek zamanlı uygulamalar için daha uygun hale getirdi.
Çapasız tasarımın farklı YOLO sürümlerinde nasıl geliştiğine hızlıca bir göz atalım:
- Ultralytics YOLOv5u: Önceden tanımlanmış çapa kutularına olan ihtiyacı ortadan kaldıran Çapasız Bölünmüş Ultralytics Başlığını (Anchor-Free Split Ultralytics Head) tanıttı. Bunun yerine model, görüntüdeki nesnelerin nerede olduğunu doğrudan tahmin ederek süreci basitleştirdi ve esnekliği ve hızı artırdı.
- YOLOv6: Çapaların yalnızca eğitim sırasında kullanıldığı Çapa Destekli Eğitim (AAT) adı verilen yeni bir yöntem kullanıldı. Bu, modelin eğitim sırasında çapa tabanlı yöntemlerin yapısından yararlanmasını sağlarken, çalışma zamanında daha iyi hız ve uyarlanabilirlik için çapasız tespiti kullanmaya devam etmesine olanak tanıdı.
- Ultralytics YOLOv8: Çapasız Bölünmüş Ultralytics Başlığı'nı kullanarak tamamen çapasız tespite geçti. Bu, modeli özellikle çapa kutularına tam olarak uymayan küçük veya tuhaf şekilli nesneler için daha hızlı ve daha doğru hale getirdi.
- Ultralytics YOLO11: YOLOv8'in çapasız yaklaşımını temel alarak, çapa kutularını tamamen ortadan kaldırarak tespiti daha da optimize eder. Bu, hayvan davranışı izleme ve perakende analitiği gibi gerçek zamanlı uygulamalar için daha hızlı ve daha doğru tespit sağlar.
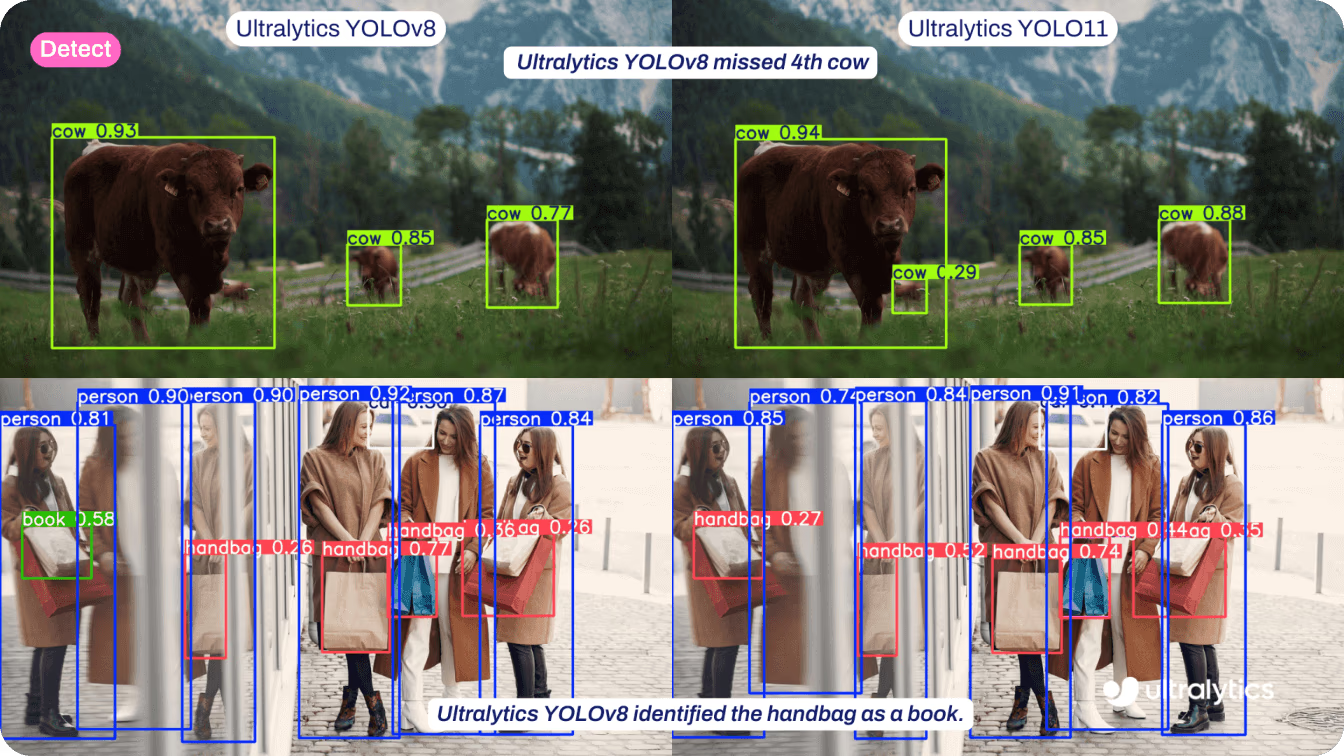
Şekil 3. Ultralytics YOLOv8 ve Ultralytics YOLO11 karşılaştırması.
Link to this sectionYOLO11'in gerçek dünya uygulamaları#
YOLO11 kullanarak çapasız tespitin faydalarına harika bir örnek otonom araçlardır. Sürücüsüz arabalarda yayaları, diğer araçları ve engelleri hızlı ve doğru bir şekilde tespit etmek güvenlik için çok önemlidir. YOLO11'in çapasız yaklaşımı, önceden tanımlanmış çapa kutularına güvenmek yerine, bir yayanın merkezi veya başka bir aracın sınırları gibi nesnelerin anahtar noktalarını doğrudan tahmin ederek tespit sürecini basitleştirir.

Şekil 4. YOLO11'de Çapasız Tespitin Faydaları (Görsel: Yazar).
YOLO11'in hesaplama açısından pahalı ve yavaş olabilen bir çapa ızgarasını her nesneye göre ayarlaması veya uydurması gerekmez. Bunun yerine anahtar özelliklere odaklanarak daha hızlı ve verimli hale gelir. Örneğin, bir yaya aracın yoluna girdiğinde, YOLO11 kişi kısmen gizlenmiş veya hareket halinde olsa bile anahtar noktaları belirleyerek konumunu hızla tespit edebilir. Çapa kutuları olmadan değişen şekil ve boyutlara uyum sağlama yeteneği, YOLO11'in nesneleri daha güvenilir ve daha yüksek hızlarda tespit etmesini sağlar; bu da otonom sürüş sistemlerinde gerçek zamanlı karar verme için hayati öneme sahiptir.
YOLO11'in çapasız yeteneklerinin gerçekten öne çıktığı diğer uygulamalar şunlardır:
- Perakende ve envanter yönetimi: YOLO11, raflardaki ürünler üst üste yığılmış veya kısmen engellenmiş olsalar bile onları izlemeyi kolaylaştırır. Bu, daha hızlı ve doğru envanter takibine yardımcı olur ve hataları azaltır.
- Tıbbi görüntüleme: YOLO11, tıbbi taramalardaki tümörleri veya diğer anormallikleri tespit edebildiği sağlık hizmetlerinde de etkilidir. Düzensiz şekilli nesnelerle çalışma yeteneği, karmaşık durumların teşhisinde doğruluğu artırmaya yardımcı olur.
- Yaban hayatı izleme: Yaban hayatı araştırmalarında YOLO11, yoğun ormanlarda veya zorlu arazilerde hayvanları takip edebilir ve araştırmacıların davranışları izlemesine veya nesli tükenmekte olan türleri korumasına yardımcı olur.
- Spor analitiği: YOLO11, spor etkinlikleri sırasında oyuncuları, top hareketlerini veya diğer unsurları gerçek zamanlı olarak takip ederek takımlar, antrenörler ve yayıncılar için değerli bilgiler sağlamak amacıyla kullanılabilir.
Link to this sectionÇapasız modellerle çalışırken dikkate alınması gerekenler#
YOLO11 gibi çapasız modeller birçok avantaj sunsa da, bazı sınırlamaları da vardır. Dikkate alınması gereken temel pratik konulardan biri, çapasız modellerin bile örtülmeler veya çok fazla üst üste binen nesnelerle zorlanabilmesidir. Bunun arkasındaki mantık, bilgisayarlı görünün insan görüşünü taklit etmeyi amaçlamasıdır ve biz bazen örtülü nesneleri tanımlamakta zorlandığımız gibi, yapay zeka modelleri de benzer zorluklarla karşılaşabilir.
Bir diğer ilginç faktör ise model tahminlerinin işlenmesiyle ilgilidir. Çapasız modellerin mimarisi çapa tabanlı olanlardan daha basit olmasına rağmen, bazı durumlarda ek iyileştirme gerekli hale gelir. Örneğin, non-maximum suppression (NMS) gibi işleme sonrası teknikleri, çakışan tahminleri temizlemek veya kalabalık sahnelerde doğruluğu artırmak için gerekli olabilir.
Link to this sectionYOLO11 ile yapay zekanın geleceğine çapa atmak#
Çapa tabanlı tespitten çapasız tespite geçiş, nesne tespitinde önemli bir ilerleme olmuştur. YOLO11 gibi çapasız modellerle süreç basitleştirilir, bu da hem doğruluk hem de hızda iyileşmelere yol açar.
YOLO11 aracılığıyla, çapasız nesne tespitinin hızlı ve hassas tespitin kritik olduğu sürücüsüz arabalar, video gözetimi ve tıbbi görüntüleme gibi gerçek zamanlı uygulamalarda nasıl mükemmelleştiğini gördük. Bu yaklaşım, YOLO11'in değişen nesne boyutlarına ve karmaşık sahnelere daha kolay uyum sağlamasını sağlayarak çeşitli ortamlarda daha iyi performans sunar.
Bilgisayarlı görü gelişmeye devam ettikçe, nesne tespiti sadece daha hızlı, daha esnek ve daha verimli hale gelecektir.
GitHub depomuzu keşfet ve yapay zeka ile ilgili her şeyden haberdar olmak için etkileşimli topluluğumuza katıl. Görüntüleme Yapay Zekasının üretim ve tarım gibi sektörleri nasıl etkilediğine göz at.






