Ultralytics YOLO modelleri ile araç yeniden tanımlamayı geliştirme
Ultralytics YOLO modellerinin, hassas ve doğru tespitler sağlayarak araç yeniden tanımlama (vehicle re-identification) çözümlerinde nasıl rol oynayabileceğini öğren.

Bir Formula One yarışı izlediğinde, tuttuğun takımın aracını fark etmen kolaydır. Ferrari'nin parlak kırmızısı ya da Mercedes'in gümüş rengi, tur üstüne tur boyunca kendini belli eder.
Aynı şeyi bir makineden yapmasını istemek, temiz bir yarış pistinde değil de trafikle dolu kalabalık şehir sokaklarında çok daha zorlayıcıdır. Bu nedenle, araç yeniden tanımlama (vehicle re-ID), son zamanlarda yapay zeka dünyasında dikkatleri üzerine çekiyor.
Araç yeniden tanımlama, makinelere aynı aracı çoklu görüş açılı veya birbiriyle örtüşmeyen kameralar arasında tanıma yeteneği kazandırır. Ayrıca, geçici tıkanmalar (bir araç kısmen gizlendiğinde) veya ışık ve bakış açısındaki değişimlerden sonra araçları tanımlamayı hedefler.
Araç re-ID teknolojisini besleyen temel teknolojilerden biri computer vision (bilgisayarlı görü) alanıdır. Bilgisayarlı görü, yapay zekanın makinelere görsel bilgiyi, yani görüntü ve videoları anlama ve yorumlama becerisi kazandırmaya odaklanan bir alt alanıdır. Bu teknolojiyi kullanarak, yapay zeka sistemleri kentsel gözetim ve trafik izleme gibi uygulamalar için araç özelliklerini analiz edebilir ve bunları geniş kamera ağlarında güvenilir bir şekilde takip edebilir.
Özellikle Ultralytics YOLO11 ve yakında çıkacak olan Ultralytics YOLO26 gibi Vizyon Yapay Zeka modelleri, nesne algılama ve takip gibi görevleri destekler. Araçları her karede hızlıca tespit edebilir ve bir sahne boyunca hareketlerini izleyebilirler. Bu modeller araç yeniden tanımlama ağları ile birleştirildiğinde, görüş açıları veya ışık koşulları değişse bile sistem aynı aracı farklı kamera beslemeleri arasında tanıyabilir.
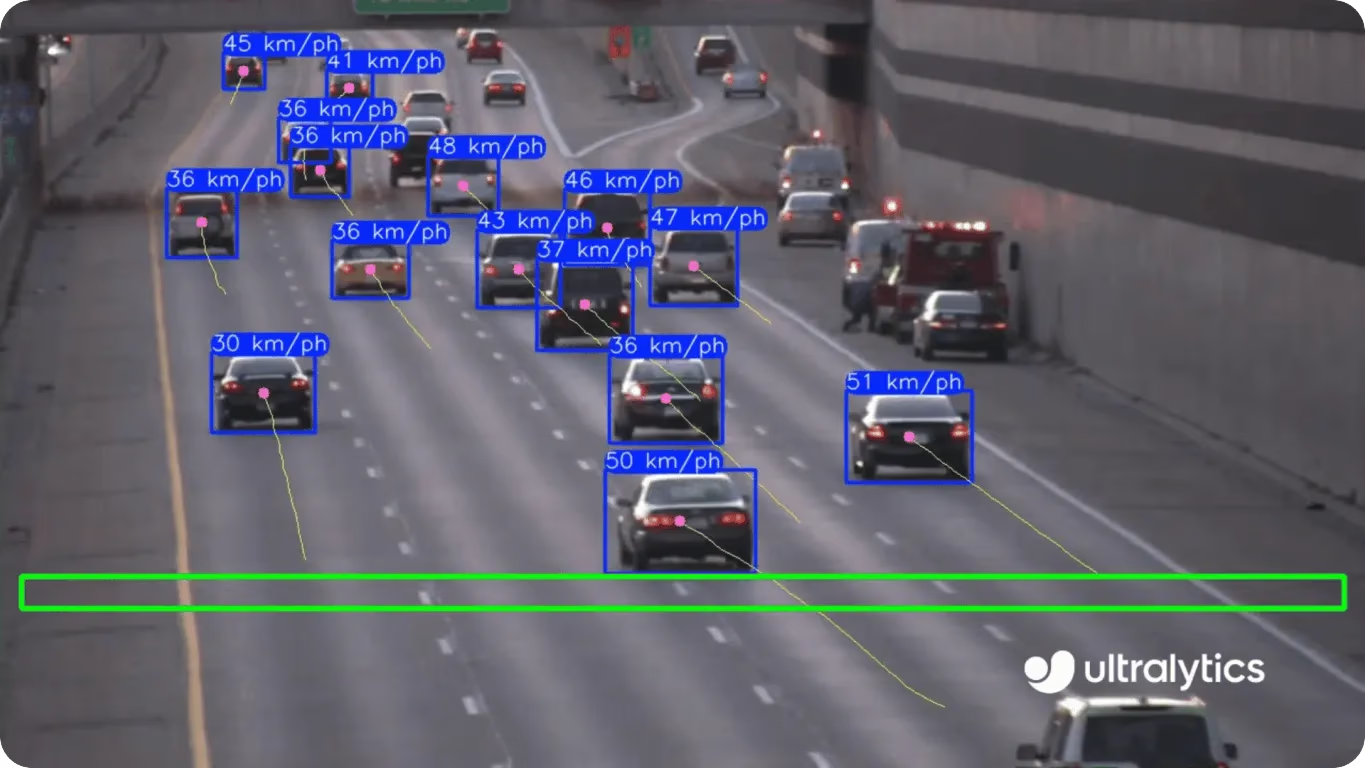
Şekil 1. Araç takibi ve hız tahmini için YOLO11 kullanımına bir örnek (Kaynak)
Bu makalede, araç yeniden tanımlamanın nasıl çalıştığına, bunu mümkün kılan teknolojiye ve akıllı ulaşım sistemlerinde nerelerde kullanıldığına bakıyoruz. Hadi başlayalım!
Link to this sectionAraç yeniden tanımlama nedir?#
Araç yeniden tanımlama, computer vision içinde önemli bir uygulama alanıdır. Bir aracın şehir içinde hareket ederken farklı, birbiriyle örtüşmeyen kameralar arasında aynı araç olarak tanınmasına ve kimliğinin tutarlı kalmasına odaklanır. Bu zorlayıcıdır çünkü her kamera aracı farklı bir açıdan, farklı ışık altında veya kısmi tıkanmalarla yakalayabilir.
Mavi bir sedanın bir kavşaktan geçip daha sonra başka bir sokakta, başka bir kamera tarafından izlenirken ortaya çıktığı bir senaryo düşün. Açı, ışık ve arka plan değişmiştir ve diğer arabalar görüşü kısa süreliğine engelleyebilir. Buna rağmen, araç re-ID sisteminin bunun aynı araç olduğunu belirlemesi gerekir.
Derin öğrenmedeki son gelişmeler, özellikle evrişimli sinir ağları (CNN'ler) ve transformer tabanlı modeller, bu süreci çok daha doğru hale getirdi. Bu modeller anlamlı görsel desenleri çıkarabilir ve birbirine benzeyen araçları ayırt ederken doğru olanı tanımlamaya devam edebilir.
Akıllı ulaşım sistemlerinde bu yetenek, kesintisiz izleme, rota oluşturma ve şehir çapında trafik analizini destekleyerek akıllı şehir sistemlerine araçların nasıl hareket ettiğine dair daha net bir tablo sunar. Güvenliği ve verimliliği artırmaya yardımcı olurlar.
Link to this sectionAraç yeniden tanımlamanın nasıl çalıştığını anlama#
Genellikle kavşaklardan, park alanlarından ve otoyollardan gelen video görüntüleri, aynı aracın farklı kameralar arasında görünüp görünmediğini belirlemek için araç yeniden tanımlama teknikleri kullanılarak analiz edilir. Bu kavram, sistemlerin bireyleri birden fazla görüş açısında takip ettiği kişi yeniden tanımlamaya benzer, ancak burada odak insan görünümü yerine araca özgü özellikleri analiz etmektir.
Bunu yapma süreci, her biri sistemin araçları tespit etmesine, görsel özelliklerini çıkarmasına ve bunları farklı bakış açıları arasında güvenilir bir şekilde eşleştirmesine yardımcı olmak için tasarlanmış birkaç temel adımdan oluşur.
Yüksek seviyede, sistem önce her karedeki araçları tespit eder ve ardından her biri için benzersiz bir dijital temsil veya embedding (gömme) oluşturmak üzere renk, şekil ve doku gibi özellikleri çıkarır. Bu gömmeler, iki görüşün aynı araca ait olup olmadığına karar vermek için genellikle nesne takibi ve uzamsal-zamansal kontrollerle desteklenerek zaman ve kameralar arasında karşılaştırılır.
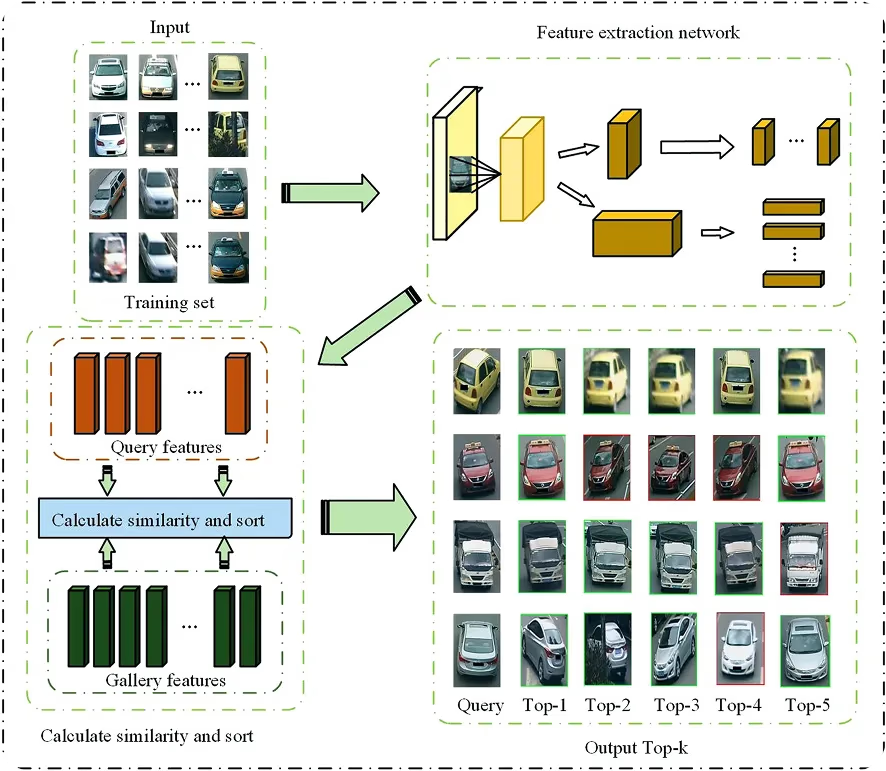
Şekil 2. Araç yeniden tanımlama nasıl çalışır. (Kaynak)
İşte bu sürece daha yakından bir bakış:
- Object detection: Sistem önce her video karesindeki araçları tanımlar ve konumlandırır, böylece hangi bölgelerin işleneceğini tam olarak bilir. Bu adım genellikle nesne algılama modelleri tarafından gerçekleştirilir.
- Öznitelik çıkarma: Algılamadan sonra, özel bir Re-ID veya öznitelik çıkarma ağı her araç kırpmasını analiz eder ve renk, şekil, doku ve ayırt edici parçalar gibi görsel detayları yakalayan öznitelik haritaları veya öznitelik temsilleri oluşturur.
- Embedding üretimi: Bu çıkarılan özellikler, özellik embedding'i adı verilen sayısal bir temsile dönüştürülür. Bu embedding, aracın farklı açılardan nasıl göründüğünü yakalayan dijital bir parmak izi gibi davranır. Eşleştirmeden önce, bu embedding'ler genellikle ışık, kontrast veya kamera ayarlarının neden olduğu farkların kimlik karşılaştırmasını engellememesi için normalize edilir. Normalizasyon, sistemin gürültü yerine anlamlı, kimlikle ilgili özelliklere odaklanmasını sağlar.
- Nesne takibi: Tek bir kamera görüşü içinde, takip algoritmaları kareler arasındaki algılamaları birbirine bağlayarak araç sahne içinde hareket ederken tutarlı bir kimliğin korunmasına yardımcı olur.
- Kameradan kameraya eşleştirme: Aynı aracı farklı kameralar arasında eşleştirmek için, sistem (Re-ID ağı tarafından oluşturulan) embedding'leri zamanlama ve konum bilgileriyle karşılaştırır. Bu adım, kameralar örtüşmese bile iki görüşün aynı araca ait olup olmadığını belirler.
Link to this sectionUltralytics YOLO modelleri araç yeniden tanımlamayı nasıl destekleyebilir?#
Ultralytics YOLO modelleri, araç yeniden tanımlama süreçlerinde önemli bir destekleyici rol oynar. Kendi başlarına Re-ID yapmasalar da, Re-ID ağlarının doğru kamera eşleştirmesi için ihtiyaç duyduğu hızlı algılama ve kararlı takip gibi diğer temel yetenekleri sağlarlar.
Şimdi, Ultralytics YOLO modellerinin YOLO11 gibi araç yeniden tanımlama sistemlerini nasıl geliştirebileceğine daha yakından bakalım.
Link to this sectionDoğru bir araç algılama modülü: Re-ID sistemlerinin ilk parçası#
Herhangi bir araç yeniden tanımlama sisteminin temeli doğru nesne algılamadır. YOLO11 gibi Ultralytics YOLO modelleri, kısmi tıkanmalar, yoğun trafik veya değişen ışık koşullarının olduğu meşgul sahnelerde bile araçları her karede hızlıca tespit edebildikleri için bunun için harika bir seçenektir.
Ayrıca özel olarak eğitilebilirler, yani modeli kendi veri setin üzerinde ince ayar yaparak taksiler, teslimat araçları veya filo araçları gibi belirli araç tiplerini tanımayı öğrenebilirsin. Bu, özellikle bir çözüm daha özelleşmiş bir algılama gerektirdiğinde kullanışlıdır. Temiz ve hassas sınırlayıcı kutular (bounding boxes) sağlayarak, Ultralytics YOLO modelleri Re-ID ağlarına çalışabilecekleri yüksek kaliteli girdiler sunar ve bu da kameralar arasında daha güvenilir bir eşleştirmeye yol açar.
Link to this sectionKararlı tek kamera takibini destekleme#
Araçlar tespit edildikten sonra, YOLO11 gibi modeller tek bir kamera görüşü içinde kararlı nesne takibini de destekleyebilir. Nesne takibi, tespit edilen bir aracı ardışık kareler boyunca izleme ve hareket ederken ona tutarlı bir ID atama sürecidir.
Ultralytics Python paketi içindeki ByteTrack ve BoT-SORT gibi takip algoritmaları için yerleşik destek ile YOLO11, araçlar bir sahne içinde hareket ederken tutarlı ID'ler koruyabilir. Bu kararlı takip, Re-ID sistemi devreye girmeden önce kimlik değiştirmelerini azaltır ve bu da nihayetinde kameralar arası eşleştirmenin doğruluğunu artırır.
Link to this sectionDaha iyi kimlik kararlılığı için isteğe bağlı takipçi seviyesinde Re-ID#
Standart hareket tabanlı takibe ek olarak, Ultralytics Python paketi, BoT-SORT takipçisi içinde isteğe bağlı görünüm tabanlı Re-ID özellikleri içerir. Bu, takipçinin iki algılamanın aynı araca ait olup olmadığını belirlemek için sadece hareket desenlerini veya sınırlayıcı kutu örtüşmesini değil, görsel görünüm özelliklerini de kullanabileceği anlamına gelir.
Etkinleştirildiğinde, BoT-SORT algılayıcıdan veya bir YOLO11 sınıflandırma modelinden hafif görünüm embedding'leri çıkarır ve bunları kareler arasındaki kimliği doğrulamak için kullanır. Bu ek görünüm ipucu, takipçinin kısa tıkanmalar, birbirine yakın geçen araçlar veya kamera hareketinden kaynaklanan küçük kaymalar gibi zorlu durumlarda daha kararlı ID'ler tutmasına yardımcı olur.
Bu yerleşik Re-ID, tam kapsamlı bir kameralar arası araç yeniden tanımlamanın yerini alması amaçlanmasa da, tek bir kamera görüşü içindeki kimlik tutarlılığını iyileştirir ve sonraki Re-ID modüllerinin güvenebileceği daha temiz izler (tracklets) üretir. Bu görünüm tabanlı takip özelliklerini kullanmak için, bir BoT-SORT takipçi yapılandırma dosyasında “with_reid” ayarını “True” yaparak ve görünüm özelliklerini sağlayacak modeli seçerek Re-ID'yi etkinleştirmen yeterlidir.
Daha fazla ayrıntı için, mevcut Re-ID seçeneklerini ve bunların nasıl yapılandırılacağını açıklayan Ultralytics nesne takibi dokümantasyon sayfasına göz atabilirsin.
Link to this sectionRe-ID ağlarına yüksek kaliteli girdiler sağlama#
Takip sırasındaki kimlik kararlılığını artırmanın ötesinde, YOLO modelleri Re-ID ağı için temiz görsel girdiler hazırlamada da önemli bir rol oynar.
Bir araç tespit edildikten sonra, sınırlayıcı kutusu genellikle kırpılır ve eşleştirme için gereken görsel özellikleri çıkaran bir yeniden tanımlama ağına gönderilir. Re-ID modelleri büyük ölçüde bu kırpılmış görüntülere güvendiğinden, bulanık, yanlış hizalanmış veya eksik kırpmalar gibi kötü girdiler, daha zayıf embedding'lere ve daha az güvenilir bir kameralar arası eşleştirmeye yol açabilir.
Ultralytics YOLO modelleri, ilgili aracı tamamen yakalayan temiz, iyi hizalanmış sınırlayıcı kutular üreterek bu sorunları azaltmaya yardımcı olur. Daha net ve doğru kırpmalarla, Re-ID ağı renk, şekil, doku ve diğer ayırt edici özellikler gibi anlamlı detaylara odaklanabilir. Yüksek kaliteli girdiler, kameralar arasında daha güvenilir ve doğru bir Re-ID performansına yol açar.
Link to this sectionBir Re-ID modeliyle birleştirildiğinde kameralar arası eşleştirmeyi etkinleştirme#
Ultralytics YOLO modelleri kendi başlarına yeniden tanımlama yapmasalar da, bir Re-ID ağının araçları farklı kamera görüşleri arasında karşılaştırmak için ihtiyaç duyduğu kritik bilgiyi sağlarlar. YOLO11 gibi modeller, her kamera içinde araçları konumlandırma ve takip etme işini üstlenirken, Re-ID modeli farklı konumlardan alınan iki araç kırpmasının aynı kimliğe ait olup olmadığını belirler.
Bu bileşenler birlikte çalıştığında, algılama ve takip için YOLO ve öznitelik çıkarma için özel bir embedding modeli, eksiksiz bir çoklu kamera araç eşleştirme hattı oluşturur. Bu, aynı aracın daha geniş bir kamera ağında hareket ederken ilişkilendirilmesini mümkün kılar.
Örneğin, yakın zamanda yapılan bir çalışmada araştırmacılar, çevrimiçi bir çoklu kamera takip sisteminde araç dedektörü olarak hafif bir YOLO11 modeli kullandılar. Çalışma, YOLO11 kullanmanın doğruluktan ödün vermeden algılama süresini azalttığını ve bunun da sonraki takip ve kameralar arası eşleştirme performansını genel olarak artırdığını buldu.

Şekil 3. Birden fazla kamera arasında YOLO11 tabanlı çoklu araç takibi ve yeniden tanımlama. (Kaynak)
Link to this sectionAraç Re-ID için derin öğrenme tabanlı mimariler#
Artık Ultralytics YOLO modellerinin araç yeniden tanımlamayı nasıl destekleyebileceğine dair daha iyi bir anlayışa sahip olduğumuza göre, öznitelik çıkarma ve eşleştirme adımlarını yöneten derin öğrenme modellerine daha yakından bakalım. Bu modeller, araçların nasıl göründüğünü öğrenmekten, güçlü embedding'ler oluşturmaktan ve görsel olarak benzer araçları farklı kamera görüşleri arasında ayırt etmekten sorumludur.
İşte nesne yeniden tanımlama sistemlerinde kullanılan temel derin öğrenme bileşenlerinden bazı örnekler:
-
CNN'ler ile Feature extraction: ResNet50 veya ResNet101 gibi evrişimli sinir ağları, renk, şekil ve doku gibi bir aracı diğerinden ayıran unsurları tanımlayarak desen tanıma yoluyla derin özellikleri öğrenir. Bu öğrenilen desenler daha sonra aracın benzersiz dijital temsili olarak işlev gören embedding'lere dönüştürülür.
-
Attention mechanisms ve transformer'lar: Uzamsal dikkat dahil olmak üzere dikkat ağları ve katmanları, aracın farlar, pencereler veya plaka alanları gibi önemli bölgelerini vurgulamaya yardımcı olabilir. Uzamsal dikkat, modeli en bilgilendirici görsel ipuçlarının bulunduğu yere odaklarken, Vision Transformer (ViT) gibi transformer tabanlı modeller görüntü genelindeki küresel ilişkileri yakalar. Birlikte, araçlar birbirine çok benzediğinde ince ayrıntı doğruluğunu artırırlar.
-
Parça tabanlı ve çok dallı ağlar: Bazı Re-ID modelleri, çatı, stop lambaları veya yan paneller gibi belirli araç bölgelerini ayrı ayrı analiz eder ve ardından sonuçları birleştirir. Bu, araçlar kısmen gizlendiğinde veya zor açılardan görüntülendiğinde bile sistemin sağlam kalması anlamına gelir.
Bu mimari bileşenlere ek olarak, metrik öğrenme, araç Re-ID modellerinin eğitiminde kilit bir rol oynar. Üçlü kayıp (triplet loss), kontrast kayıp ve çapraz entropi kaybı gibi kayıp fonksiyonları, aynı aracın görüntülerini birbirine yaklaştırırken farklı olanları birbirinden uzaklaştırarak sistemin güçlü, ayırt edici embedding'ler öğrenmesine yardımcı olur.
Link to this sectionPopüler araç yeniden tanımlama veri setleri ve kıyaslamalar#
Bilgisayarlı görü araştırmalarında, bir veri setinin kalitesi, bir modelin dağıtıldıktan sonra ne kadar iyi performans göstereceği üzerinde büyük bir etkiye sahiptir. Bir veri seti, modelin öğrendiği etiketli görüntüleri veya videoları sağlar.
Araç yeniden tanımlama için bu son teknoloji veri setleri; ışık, bakış açısı değişiklikleri ve hava durumu varyasyonları gibi çeşitli koşulları yakalamalıdır. Bu çeşitlilik, modellerin gerçek dünya ulaşım ortamlarının karmaşıklığını yönetmesine yardımcı olur.
İşte araç yeniden tanımlama modellerinin eğitimi, optimizasyonu ve değerlendirilmesini destekleyen popüler veri setlerine bir bakış:
- VeRi-776 veri seti: 20 şehir kamerasından alınan 50.000'den fazla açıklama eklenmiş araç görüntüsünden oluşan bir koleksiyondur. Açıklamalar; araç kimliği, rengi, modeli ve plaka bölgelerini içererek detaylı öznitelik öğrenmeyi sağlar.
- VehicleID veri seti: Bu büyük ölçekli veri seti, 26.000'den fazla aracı temsil eden 200.000'den fazla görüntüye sahiptir. Ölçeklenebilirliği incelemek ve farklı yöntemler arasında temel karşılaştırmalar yapmak için sıklıkla seçilir.
- VeRi-Wild veri seti: Bakış açısı, hava durumu ve kısmi tıkanma farklılıkları dahil olmak üzere gerçek dünya değişkenliğini yansıtacak şekilde tasarlanmıştır. Model sağlamlığını ve genellemesini değerlendirmek için yaygın olarak kullanılır.

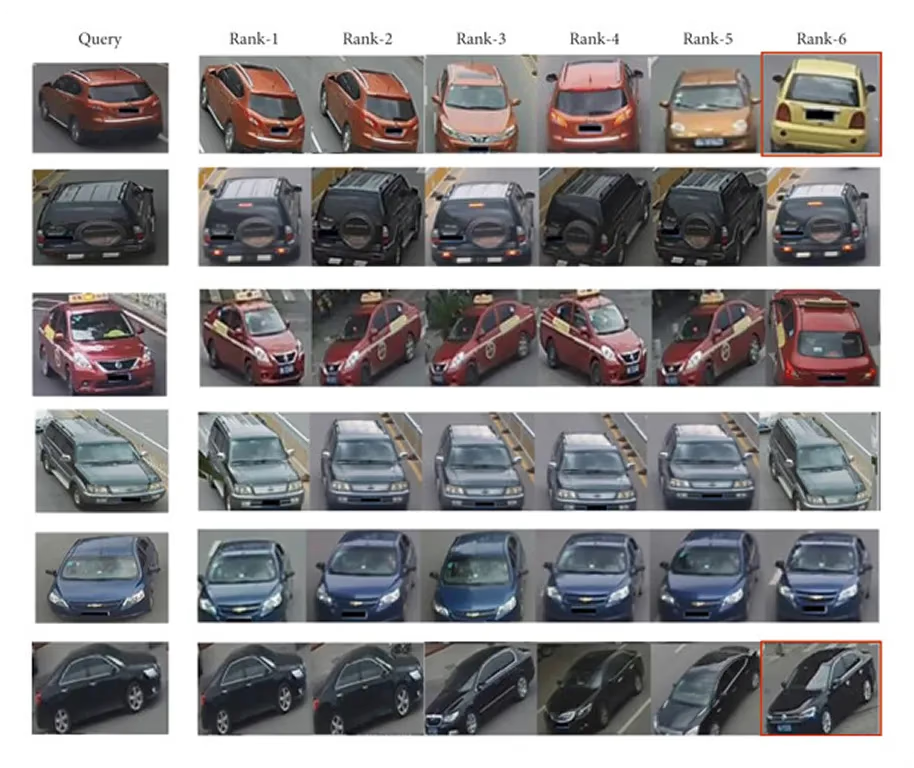
Şekil 4. VeRi-776 veri setindeki araç örneği. (Kaynak)
Bu veri setlerindeki model performansı genellikle mean average precision (mAP) ve Rank-1 veya Rank-5 doğruluğu gibi metrikler kullanılarak değerlendirilir. mAP, modelin belirli bir araç için tüm ilgili eşleşmeleri ne kadar doğru aldığını ölçerken, Rank-1 ve Rank-5 skorları doğru eşleşmenin sonuç listesinin en üstünde mi yoksa ilk birkaç tahmin içinde mi göründüğünü gösterir.
Bu kıyaslamalar, araştırmacılara farklı yaklaşımları karşılaştırmak için tutarlı bir yol sunar ve gerçek dünya kullanımı için daha doğru ve güvenilir araç yeniden tanımlama sistemlerinin geliştirilmesine rehberlik etmede önemli bir rol oynar.
Link to this sectionAraç yeniden tanımlamanın uygulamaları#
Artık temelleri ele aldığımıza göre, araç yeniden tanımlamanın pratik ulaşım, mobilite ve gözetim iş akışlarını desteklediği bazı gerçek dünya kullanım durumlarını inceleyelim.
Link to this sectionKentsel trafik gözetimi ve izleme#
Yoğun şehir yolları sürekli hareketle doludur ve trafik kameraları, bir araç farklı bölgeler arasında hareket ederken onu takip etmekte genellikle zorlanır. Işık değişiklikleri, kalabalık sahneler ve birbirinin neredeyse aynısı olan araçlar, kimliklerin kameralar arasında kaybolmasına neden olabilir.
Araç yeniden tanımlama, araçları net bir şekilde tespit ederek, ayırt edici özellikleri çıkararak ve düşük çözünürlüklü veya yoğun görüntülerde bile tutarlı ID'leri koruyarak bunu çözer. Sonuç, ağ genelinde daha sorunsuz ve sürekli bir takiptir; bu da trafik ekiplerine araçların şehir içinde nasıl hareket ettiğine dair daha net bir resim sunar ve tıkanıklıklara ve olaylara daha hızlı, daha bilinçli yanıt verilmesini sağlar.
Link to this sectionAkıllı park sistemleri#
Akıllı park tesisleri; giriş, çıkış, erişim kontrolü ve alan tahsisini yönetmek için tutarlı araç tanımlamaya güvenir. Ancak, bu ortamlardaki kameralar araçları genellikle yeraltı garajları, gölgeli alanlar veya gün batımındaki dış mekan otoparkları gibi zorlu ışık koşullarında ve sıra dışı açılardan yakalar.
Bu koşullar, aynı aracın farklı bölgelerde görülüp görülmediğini doğrulamayı zorlaştırır. Kimlikler tutarsız olduğunda, park kayıtları bozulabilir, erişim kontrolü daha az güvenilir hale gelebilir ve sürücüler gecikmeler yaşayabilir. Bu nedenle, birçok akıllı park sistemi, araç tesis içinde hareket ederken her biri için kararlı bir kimlik korumak amacıyla araç yeniden tanımlama modellerini bünyesine katar.
Şekil 5. Sol tarafta seçilen araç görüntüsünü ve sağ tarafta eşleşen arama sonuçlarını gösteren bir araç yeniden tanımlama örneği. (Kaynak)
Link to this sectionKolluk kuvvetleri ve adli tıp#
Trafik izlemenin üzerine inşa edilen araç yeniden tanımlama, kolluk kuvvetleri ve adli soruşturmalarda da önemli bir rol oynar. Birçok durumda, memurların bir aracı birkaç kamera boyunca takip etmesi gerekir ancak plakalar okunamaz, eksik veya kasıtlı olarak gizlenmiş olabilir.
Kalabalık sahneler, düşük görüş mesafesi ve kısmi tıkanmalar, farklı araçların birbirine aldatıcı derecede benzer görünmesine neden olarak manuel tanımlamayı yavaş ve güvenilmez hale getirebilir. Araç yeniden tanımlama, yalnızca plakalara güvenmek yerine görsel özelliklerini analiz ederek bir aracın örtüşmeyen kamera ağlarındaki hareketini izlemek için kullanılabilir.
Bu, müfettişlerin bir aracın hareketlerini daha kolay takip edebileceği, farklı konumlarda ne zaman göründüğünü anlayabileceği ve bir olaydan önce ve sonra izlediği yolu doğrulayabileceği anlamına gelir. Yapay zeka destekli araç re-ID; şüpheli araçları izleme, olay görüntülerini inceleme veya bir olaydan önce ya da sonra aracın hangi yöne gittiğini belirleme gibi görevleri de destekler.
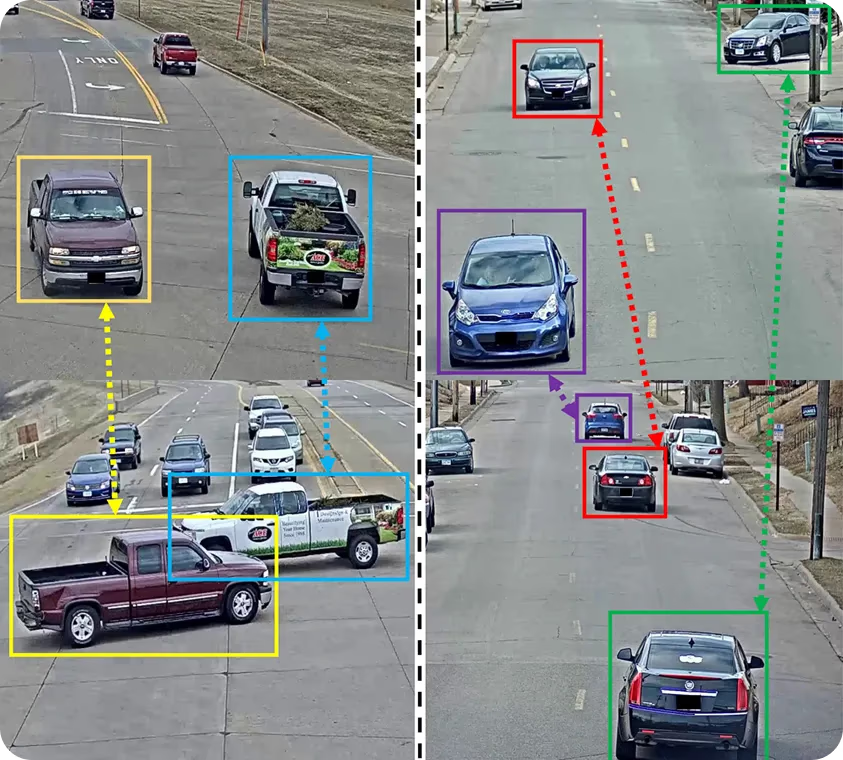
Şekil 6. Çeşitli perspektiflerle farklı kameralar arasında eşleşen araçlar. (Kaynak)
Link to this sectionFilo ve lojistik takibi#
Filo ve lojistik operasyonları, araç hareketini izlemek için genellikle GPS, RFID etiketleri ve manuel kayıtlara güvenir, ancak bu araçlar yükleme alanları, depo sahaları ve dahili yol ağları gibi güvenlik veya saha kameraları tarafından kapsanan alanlarda boşluklar bırakır.
Araçlar sıklıkla birbiriyle örtüşmeyen kameralar arasında hareket eder, yapıların arkasında kaybolur veya filodaki diğer araçlarla neredeyse aynı görünür; bu da aynı aracın farklı konumlarda görülüp görülmediğini doğrulamayı zorlaştırır. Araç yeniden tanımlama sistemleri, araç tesis içinde hareket ederken her biri için tutarlı bir kimlik korumak amacıyla görsel detayları ve zamanlama bilgilerini analiz ederek bu boşlukları kapatmaya yardımcı olabilir.
Bu, filo yöneticilerine merkezlerindeki aktivitelerin daha eksiksiz bir görünümünü sunarak teslimat yollarını doğrulama, olağan dışı hareketleri tanımlama ve araçların beklenen rotaları takip etmesini sağlama gibi görevleri destekler.
Link to this sectionAraç re-id görevlerinin artıları ve eksileri#
İşte yapay zeka destekli araç yeniden tanımlamayı kullanmanın temel faydalarından bazıları:
- Azaltılmış manuel iş yükü: Araç re-ID, aksi takdirde kapsamlı manuel inceleme gerektirecek kimlik eşleştirme görevlerini otomatikleştirerek, video görüntülerini analiz etmek için gereken zamanı ve çabayı önemli ölçüde azaltır.
- Otomasyon ve gerçek zamanlı içgörüler: Algılama, takip ve özellik eşleştirmeyi birleştirerek, araç re-ID sürekli otomatik izlemeyi destekler ve daha hızlı olay müdahalesi için gerçek zamanlı uyarılar sağlayabilir.
- Ölçeklenebilirlik ve uyarlanabilirlik: Re-ID modelleri, güçlü özellik öğrenme, çok ölçekli özellik çıkarma ve görsel değişimler altında kararlı kalan değişmez temsiller yoluyla yeni ortamlara, ışık koşullarına veya kamera açılarına uyum sağlayabilir. Bu yetenekler, onları hem büyük şehir ağları hem de daha küçük dağıtımlar için uygun hale getirir.
Araç yeniden tanımlama birçok avantaj sunsa da, dikkate alınması gereken bazı sınırlamalar da vardır. İşte gerçek dünya ortamlarındaki güvenilirliğini etkileyen birkaç faktör:
- Yüksek hesaplama talebi: Öznitelik çıkarma, embedding üretimi ve kameralar arası eşleştirme, özellikle büyük kamera ağlarını izlerken önemli miktarda işlem gücü gerektirir.
- Çevresel değişkenlik: Gece ışığı, hava durumu değişiklikleri, gölgeler ve tıkanmalar gibi faktörler, modelin sahneler arasında tutarlı kimlikleri koruma yeteneğini düşürebilir.
- Veri seti ve alan sınırlamaları: Sınırlı veya idealize edilmiş veri setleri üzerinde eğitilen modeller, daha fazla ince ayar veya alan uyarlaması olmadan gerçek dünya koşullarına iyi genellenemeyebilir.
Link to this sectionAraç yeniden tanımlama yöntemleri için önümüzdeki yol#
Araç yeniden tanımlama, teknoloji geliştikçe ilerlemeye devam ediyor. IEEE, CVPR ve arXiv'deki son yayınların yanı sıra uluslararası konferanslardaki sunumlar, çoklu veri kaynaklarını ve daha gelişmiş özellik mantığını birleştiren daha zengin modellere doğru net bir geçişe işaret ediyor. Bu alandaki gelecekteki çalışmalar muhtemelen daha sağlam, verimli ve ölçeklenebilir bir şekilde gerçek dünya değişkenliğini ele alabilen sistemler oluşturmaya odaklanacaktır.
Örneğin, umut verici bir yön, transformer-based modellerin ve çizge toplama ağlarının kullanılmasıdır. Transformer'lar bir görüntünün tamamını analiz edebilir ve tüm görsel detayların nasıl bir araya geldiğini anlayabilir; bu da sistemin açı veya ışık değişse bile aynı aracı tanımasına yardımcı olur.
Graf tabanlı modeller, farklı araç parçalarını veya kamera görüntülerini bir ağdaki bağlantılı noktalar olarak ele alarak bunu bir adım öteye taşıyor. Bu, sistemin bu anahtar noktalar arasındaki korelasyonu anlamasını ve araç kimlikleri ile ayırt edici özellikler hakkında daha iyi kararlar vermesini sağlıyor.
Bir diğer önemli ilerleme ise multi-modal data fusion ve özellik birleştirmedir. Yeni sistemler yalnızca görüntülere güvenmek yerine, görsel bilgileri GPS verileri veya sensörlerden gelen hareket desenleri gibi diğer multimedya sinyalleriyle birleştiriyor. Bu ekstra bağlam, araçlar kısmen engellendiğinde, aydınlatma zayıf olduğunda veya kamera açıları aniden değiştiğinde sistemin doğruluğunu korumasını kolaylaştırıyor.
Link to this sectionÖne çıkanlar#
Araç yeniden tanımlama, akıllı ulaşım sistemlerinde temel bir metodoloji haline geliyor ve şehirlerin araçları farklı kameralar arasında daha güvenilir bir şekilde takip etmesine yardımcı oluyor. Derin öğrenmedeki ilerlemeler ve daha zengin, daha çeşitli veri setleri kullanılarak yapılan daha iyi doğrulama sayesinde, bu sistemler gerçek dünya koşullarında daha doğru ve kullanışlı hale geliyor.
Teknoloji geliştikçe, inovasyonu gizlilik, güvenlik ve etik konularındaki sorumlu uygulamalarla dengelemek önem taşıyor. Genel olarak bu ilerlemeler, daha akıllı, daha güvenli ve daha verimli ulaşım ağlarının yolunu açıyor.
GitHub repository sayfamızı ziyaret ederek ve community sayfamıza katılarak yapay zeka hakkında daha fazla bilgi edinin. AI in robotics ve computer vision in manufacturing hakkında bilgi edinmek için çözüm sayfalarımıza göz atın. Bugün yapay zeka ile çalışmaya başlamak için our licensing options sayfasına göz atın!






