Navigasyon uygulamalarında bilgisayarlı görü'yü keşfetmek
Navigasyon çözümlerindeki bilgisayarlı görü'nün daha akıllı ve güvenli seyahat deneyimleri için gerçek zamanlı haritalamayı, nesne tanımayı ve artırılmış gerçekliği nasıl geliştirdiğini gör.

Günümüzde telefonunuzu çıkarıp bir varış noktası girmek ve oraya ulaşmak için adım adım yol tariflerini takip etmek çok zahmetsiz geliyor. Sadece birkaç saniyenizi alan bir işlem. Ancak bu gündelik kolaylık, yıllarca süren teknolojik ilerlemenin bir sonucudur. Navigasyon, kağıt haritalardan ve pusulalardan dünyayı gerçek zamanlı olarak anlayıp ona tepki verebilen akıllı sistemlere kadar uzun bir yol kat etti.
Bu değişimin arkasındaki teknolojilerden biri, makinelerin görsel bilgileri tıpkı insanlar gibi yorumlamasına olanak tanıyan bir yapay zeka (YZ) dalı olan bilgisayarlı görü'dür. En yeni navigasyon araçları artık harita doğruluğunu artırmak, yol koşullarını izlemek ve kullanıcıları karmaşık ortamlarda yönlendirmek için uydulardan, araç içi kameralardan ve sokak düzeyindeki sensörlerden gelen gerçek zamanlı görüntüleri kullanıyor.
Bu makalede, bilgisayarlı görünün GPS haritalarını iyileştirerek, gerçek zamanlı trafik güncellemeleri sunarak ve artırılmış gerçeklik navigasyonu ile otonom araçlar gibi teknolojileri destekleyerek navigasyonu nasıl geliştirdiğini inceleyeceğiz.
Link to this sectionSürükleyici 3D haritalamaya sahip YZ navigasyon sistemleri#
İster şehrin diğer ucuna gidiyor ister yakındaki bir kafe arıyor olun, günlük yaşamda gezinmek için Google Maps gibi araçları kullanmak çok yaygınlaştı. YZ teknolojileri daha yaygın hale geldikçe, Google Maps tarafından 2023'te kullanıma sunulan ve kullanıcıların yolculuklarının bölümlerini bir 3D ortamında önizlemelerine olanak tanıyan Immersive View gibi giderek daha gelişmiş özellikler görüyoruz. Bu, YZ, fotogrametri ve bilgisayarlı görünün birleşimiyle mümkün olmaktadır.
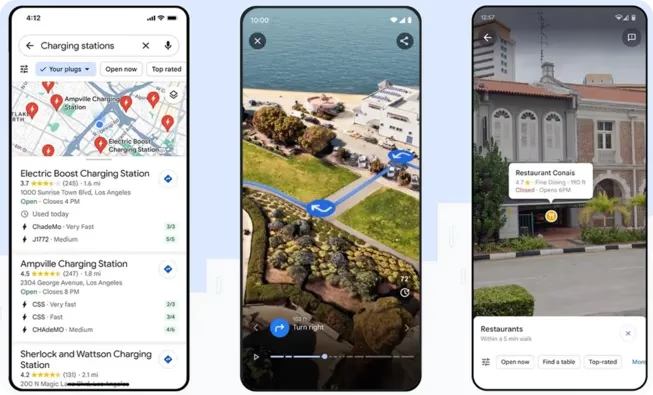
Şekil 1. Google Maps’ Immersive View.
Her şey, bir dizi özel ekipman tarafından çekilen milyarlarca yüksek çözünürlüklü görüntü ile başlar. Buna, şehir içinde dolaşan 360 derecelik kameralarla donatılmış araçlar olan Street View arabaları ve yürüyüş parkurları veya dar ara sokaklar gibi araçların ulaşamadığı yerlerde görüntü çekmek için kullanılan monte edilmiş kameralara sahip giyilebilir sırt çantaları olan Trekker cihazları dahildir.
Bu görüntüler, sokakların, binaların ve arazinin doğru 3D modellerini oluşturmak için farklı açılardan çekilmiş 2D fotoğrafları birleştiren bir teknik olan fotogrametri kullanılarak harita verileriyle hizalanır.
Bilgisayarlı görü, trafik işaretleri, kaldırımlar, yaya geçitleri ve bina girişleri gibi önemli özellikleri tanımlamak ve etiketlemek için nesne tespiti ve görüntü segmentasyonu kullanılarak bu modelleri analiz etmek için kullanılır.

Şekil 2. Immersive View, sokaktaki nesneleri segmentlere ayırmak için segmentasyon kullanır.
Etiketlenmiş veriler, görsel ipuçlarının bölgeler arasında nasıl farklılık gösterdiğini tanıyan YZ sistemlerini eğitmek için kullanılır. Örneğin sistem, genellikle sarı veya turuncu bir eşkenar dörtgen olan Amerika Birleşik Devletleri'ndeki bir "SLOW" tabelası ile genellikle kırmızı beyaz bir üçgen olan Japonya'daki benzer bir tabela arasında kolayca ayrım yapabilir. Bu anlayış düzeyi, navigasyon deneyimini daha doğru ve kültürel açıdan farkında hale getirir.
Son olarak Immersive View, canlı navigasyon rotalarını 3D ortamın üzerine bindirerek tam olarak nereye gittiğinizi gösteren pürüzsüz ve sezgisel bir deneyim sunar.
Link to this sectionNavigasyon çözümlerinde artırılmış gerçeklik#
Muhtemelen hepimiz kendi etrafımızda dönüp Google Maps'in bizi hangi yöne yönlendirdiğini anlamaya çalışmışızdır. İşte artırılmış gerçeklik (AR) navigasyonu, dijital bilgileri gerçek dünya kamera görüntüsünün üzerine bindiren bir teknoloji olarak tam da bu kafa karışıklığını çözmeyi hedefliyor. İnsanların şehir sokakları veya büyük kapalı alanlar gibi yoğun yerlerde yollarını bulma biçimini değiştiriyor.
Normal haritaları takip etmek, özellikle GPS sinyalleri zayıf olduğunda veya iyi çalışmadığında zor olabilir. AR navigasyonu, dijital yönleri, okları ve etiketleri doğrudan gerçek dünyanın canlı kamera görüntüsü üzerinde göstererek bunu çözer. Bu, kullanıcıların çevrelerindeki sokaklarla ve binalarla eşleşen rehberliği gördükleri anlamına gelir ve nereye gideceklerini bilmeyi çok daha kolaylaştırır.
Link to this sectionNavigasyonda artırılmış gerçeklik nasıl kullanılır?#
AR navigasyonu, cihazın kamerası aracılığıyla ortamı anlamak için bilgisayarlı görü modellerine güvenir. Bu, bina kenarları veya sokak tabelaları gibi özellikleri tespit eden ve bunları kayıtlı bir haritayla eşleştiren görüntü yerelleştirme gibi çeşitli görevleri içerir. Eşzamanlı yerelleştirme ve haritalama (SLAM), cihazın konumunu gerçek zamanlı olarak izlerken ortamın bir haritasını oluşturur.
Örneğin Zürih Havalimanı, iç mekan navigasyonu için Google Maps’ Live View'u uygulayan ilk havalimanı oldu. Yolcular, gerçek dünya ortamında bindirilmiş okları ve yönleri görmek, terminaller boyunca kapılara, mağazalara ve hizmetlere ulaşmak için telefon kameralarını kullanabilirler. Bu, karmaşık iç mekanlarda navigasyonu kolaylaştırarak yolcu deneyimini iyileştirir.

Şekil 3. Zürih Havalimanı, yolcuları iç mekanlarda yönlendirmek için bilgisayarlı görü ve AR kullanıyor.
Link to this sectionYZ navigasyon sistemleri ile yol güvenliğini artırma#
Şehir sokakları her geçen gün daha da kalabalıklaşıyor. Yoldaki daha fazla araba, kalabalık kaldırımlar ve sürekli hareketlilik ile trafiğin sorunsuz ve güvenli bir şekilde akmasını sağlamak giderek zorlaşıyor. Karmaşayı yönetmeye yardımcı olmak için birçok şehir YZ'ye ve bilgisayarlı görüye yöneliyor.
Kavşaklara ve yollar boyunca kurulan akıllı kameralar ve sensörler, sürekli bir görsel veri akışı yakalar. Bu görüntüler; kazaları tespit etmek, trafik akışını izlemek, çukurları fark etmek ve yasa dışı park etme veya riskli yaya davranışı gibi durumları yakalamak için gerçek zamanlı olarak işlenir.
Bunun ilginç bir örneği, Çin'in Hangzhou kentindeki Smart Airport Expressway'dir. Hangzhou şehir merkezini Xiaoshan Uluslararası Havalimanı'na bağlayan bu 20 kilometrelik otoyol, yüksek çözünürlüklü kameralar ve milimetre dalga radarlarıyla yükseltildi. Bu cihazlar sürekli olarak video ve sensör verisi toplar ve bunlar daha sonra bilgisayarlı görü kullanılarak analiz edilir.
Sistem sadece görüntü kaydetmekle kalmıyor, aynı zamanda yolda neler olduğunu da yorumluyor. Bilgisayarlı görü algoritmaları, araç çarpışmalarını tespit ediyor, trafik ihlallerini tanıyor ve hatta otoyol çıkışlarının yakınındaki yayaları veya olağandışı hareketleri tanımlıyor. Bu, trafik görevlilerinin fiziksel olarak sahada bulunmalarına gerek kalmadan olaylara saniyeler içinde müdahale etmelerini sağlıyor.
Veriler ayrıca gerçek zamanlı trafik koşullarını, araç ayrıntılarını ve ortaya çıkan sıkışıklığı gösteren otoyolun canlı, 3D sanal modeli olan bir dijital ikize aktarılır. Trafik memurları akışı yönetmek, akıllı uyarılar yayınlamak ve olaylara hızlı ve doğru bir şekilde yanıt vermek için bu görsel arayüzü izler.
Link to this sectionNavigasyonda bilgisayarlı görü ile desteklenen otonom mobilite#
Günümüzde navigasyon, A noktasından B noktasına gitmenin çok ötesine geçiyor. Artık ister yolda ister depoların içinde olsun, insanları taşıyan, malları yöneten ve gerçek zamanlı kararlar alan akıllı sistemlerin kritik bir parçası haline geldi.
Bu sistemlerin birçoğunun kalbinde, makinelerin görsel verileri yorumlamasını ve çevrelerine anında tepki vermesini sağlayan bilgisayarlı görü yer alır. Bu teknolojinin farklı ortamlarda navigasyonu nasıl dönüştürdüğünü görmek için bazı örneklere bakalım.
Link to this sectionBilgisayarlı görü ile gezinen depo robotları#
Robotlar, özellikle büyük ölçekli depo operasyonlarında lojistiğin geleceği için vazgeçilmez hale geliyor. E-ticaret talebi arttıkça şirketler, karmaşık ortamlarda gezinmek, öğeleri sıralamak ve envanteri hız ve hassasiyetle yönetmek için bilgisayarlı görü destekli makinelere giderek daha fazla güveniyor.
Örneğin, 750.000'den fazla robotun operasyonların verimli bir şekilde yürümesini sağlamak için insanlarla yan yana çalıştığı Amazon’un lojistik merkezlerini ele alalım. Bu robotlar, yoğun depo zeminlerinde gezinmek, öğeleri tanımlamak ve hızlı, doğru kararlar almak için büyük ölçüde bilgisayarlı görüye güveniyor.
Böyle bir sistem, envanter işlemlerini hızlandırmak için tasarlanmış bir robotik platform olan Sequoia'dır. Gelen ürünleri taramak, saymak ve düzenlemek için gelişmiş bilgisayarlı görü kullanır, depolama ve geri alma süreçlerini kolaylaştırmaya yardımcı olur.
Benzer şekilde, robotik bir kol olan Vulcan, raflardan güvenli bir şekilde ürün toplamak için kameralar ve görüntü analizi kullanır, her nesnenin şekline ve konumuna göre tutuşunu ayarlar ve hatta insan yardımının ne zaman gerekli olduğunu tanır. Bu arada, yine görüş özellikli bir robot olan Cardinal ise sıralama konusunda uzmanlaşmıştır: karışık paket yığınlarını tarar ve bunları tam olarak doğru giden araçlara yerleştirir.

Şekil 4. Cardinal bir yığından paketleri hassas bir şekilde kaldırıyor.
Link to this sectionOtonom araç navigasyonunda bilgisayarlı görü#
Şimdiye kadar bilgisayarlı görünün insanların ve robotların çevrelerinde gezinmelerine nasıl yardımcı olduğunu gördük. Ancak navigasyonun tamamen aracın gerçek zamanlı olarak neyi görebildiğine ve anlayabildiğine bağlı olduğu sürücüsüz arabalar gibi otonom sistemler için de aynı derecede önemlidir.
Buna iyi bir örnek Tesla Vision sistemi'dir. Tesla, radar ve diğer sensörleri kaldırıp arabanın çevresinin tam 360 derecelik görünümünü sağlayan bir kamera ağı lehine otonom sürüş için yalnızca kamera odaklı bir yaklaşım benimsedi. Bu kameralar görsel verileri, ortamı yorumlamak ve anlık sürüş kararları almak için derin sinir ağlarını kullanan Full Self-Driving (FSD) bilgisayarına besler.
Gördüklerine dayanarak sistem, tıpkı insan bir sürücü gibi ama tamamen görsel girdilerle direksiyonu ne zaman kıracağına, hızlanacağına, fren yapacağına veya şerit değiştireceğine karar verir. Tesla, filosu genelinde devasa miktarlarda gerçek dünya sürüş verisi toplayıp bunlardan öğrenerek bu sistemi sürekli olarak iyileştiriyor.

Şekil 5. Tesla, güvenli ve otonom navigasyon için bilgisayarlı görü kullanır (Kaynak: Tesla).
Link to this sectionNavigasyonda bilgisayarlı görünün artıları ve eksileri#
İşte özellikle doğruluk, güvenlik ve gerçek zamanlı karar vermenin esas olduğu sistemlerde navigasyonda bilgisayarlı görü kullanmanın bazı temel avantajları:
- Yakıt tüketimini azaltır: Sürücülerin trafikten ve dur-kalklı rotalardan kaçınmasına yardımcı olarak, bilgisayarlı görü genel yakıt tüketimini ve seyahat süresini azaltabilir, bu da günlük işe gidip gelmeleri daha verimli hale getirir.
- Yol aşınmasını ve altyapı sorunlarını tespit eder: Görüntü tabanlı çözümler, bakım ekiplerine güvenilir, gerçek zamanlı veriler sağlayarak çukurları, silinmiş şerit çizgilerini, kırık tabelaları ve hasarlı altyapıyı tarayabilir.
- Diğer YZ araçlarıyla sorunsuz bir şekilde bütünleşir: Bilgisayarlı görü, son derece akıllı ve kişiselleştirilmiş bir navigasyon deneyimi oluşturmak için sesli asistanlar, davranış tahmin modelleri veya rota optimizasyon algoritmalarıyla birleştirilebilir.
Bilgisayarlı görü navigasyona birçok fayda sağlasa da, bu tür çözümleri uygularken dikkate alınması gereken birkaç önemli sınırlama da beraberinde gelir. İşte aklınızda bulundurmanız gereken bazı temel zorluklar:
- Genelleme eksikliği: Belirli ortamlarda veya senaryolarda eğitilen modeller, yeniden eğitim almadan yeni veya değişen bağlamlarda uygulandığında genellikle zorlanır.
- Aydınlatma sınırlamaları: Görüntü sistemleri, iyi çalışmak için iyi aydınlatmaya ve açık havaya güvenir. Sis, şiddetli yağmur veya karanlıkta, LiDAR veya radar gibi sensörlerle birleştirilmedikçe performansları düşer.
- Gizlilik riskleri: Kamera kullanan navigasyon sistemleri, insanların ve özel mülklerin görüntülerini izinsiz olarak kaydedebilir. Bu, geliştirme ve dağıtım sırasında dikkatle ele alınması gereken gizlilik sorunlarını gündeme getirir.
Link to this sectionÖne çıkanlar#
Bilgisayarlı görü; haritaları daha dinamik, trafik sistemlerini daha akıllı ve hareketliliği daha erişilebilir hale getirerek navigasyonu yeniden keşfediyor. Bir zamanlar statik olan rotalar, artık sürükleyici 3D önizlemeler, AR rehberliğinde yol tarifleri ve otonom ulaşım teknolojileri ile desteklenen gerçek zamanlı, etkileşimli deneyimlerdir.
Teknoloji ilerledikçe odak noktasının bu sistemleri daha kapsayıcı, uyarlanabilir ve sorumlu hale getirmeye kayacağı muhtemeldir. Sürekli ilerleme; çeşitli ortamlarda doğruluğu artırmaya, güvenilir performansı korumaya ve kullanıcı gizliliğini korumaya bağlı olacaktır. Navigasyonda bilgisayarlı görünün geleceği, sadece akıllı değil, aynı zamanda tasarımında ve etkisinde duyarlı çözümler inşa etmekte yatmaktadır.
Büyüyen topluluğumuza katılın! YZ hakkında bilgi edinmek için GitHub depomuzu keşfedin ve vizyon YZ projelerinize başlamak için lisanslama seçeneklerimize göz atın. Perakendede YZ ve tarımda bilgisayarlı görü gibi inovasyonlarla ilgileniyor musunuz? Daha fazlasını keşfetmek için çözüm sayfalarımızı ziyaret edin!






