2025'in en iyi nesne tespit modelleri
Popüler mimarilere, performans dengelerine ve pratik dağıtım faktörlerine bakarak 2026'daki en iyi nesne algılama modellerini keşfet.
Bu yılın başlarında, yapay zeka ve makine öğrenimi öncülerinden Andrew Ng, ajan tabanlı nesne algılama kavramını tanıttı. Bu yaklaşım, büyük miktarda eğitim verisine ihtiyaç duymadan, metin tabanlı komutlara göre nesneleri tespit etmek için bir akıl yürütme ajanı kullanır.
Görüntülerdeki ve videolardaki nesneleri devasa etiketli veri kümelerine gerek kalmadan tanımlayabilmek, daha akıllı ve daha esnek computer vision sistemlerine doğru atılmış bir adımdır. Ancak ajan tabanlı görsel yapay zeka henüz başlangıç aşamasındadır.
Bir görüntüdeki insanları veya trafik işaretlerini tespit etmek gibi genel görevleri yerine getirebilse de, daha hassas bilgisayarlı görü uygulamaları hala geleneksel nesne algılama modellerine dayanır. Bu modeller, tam olarak neye bakacaklarını ve nesnelerin nerede bulunduğunu öğrenmek için büyük ve dikkatlice etiketlenmiş veri kümeleriyle eğitilirler.
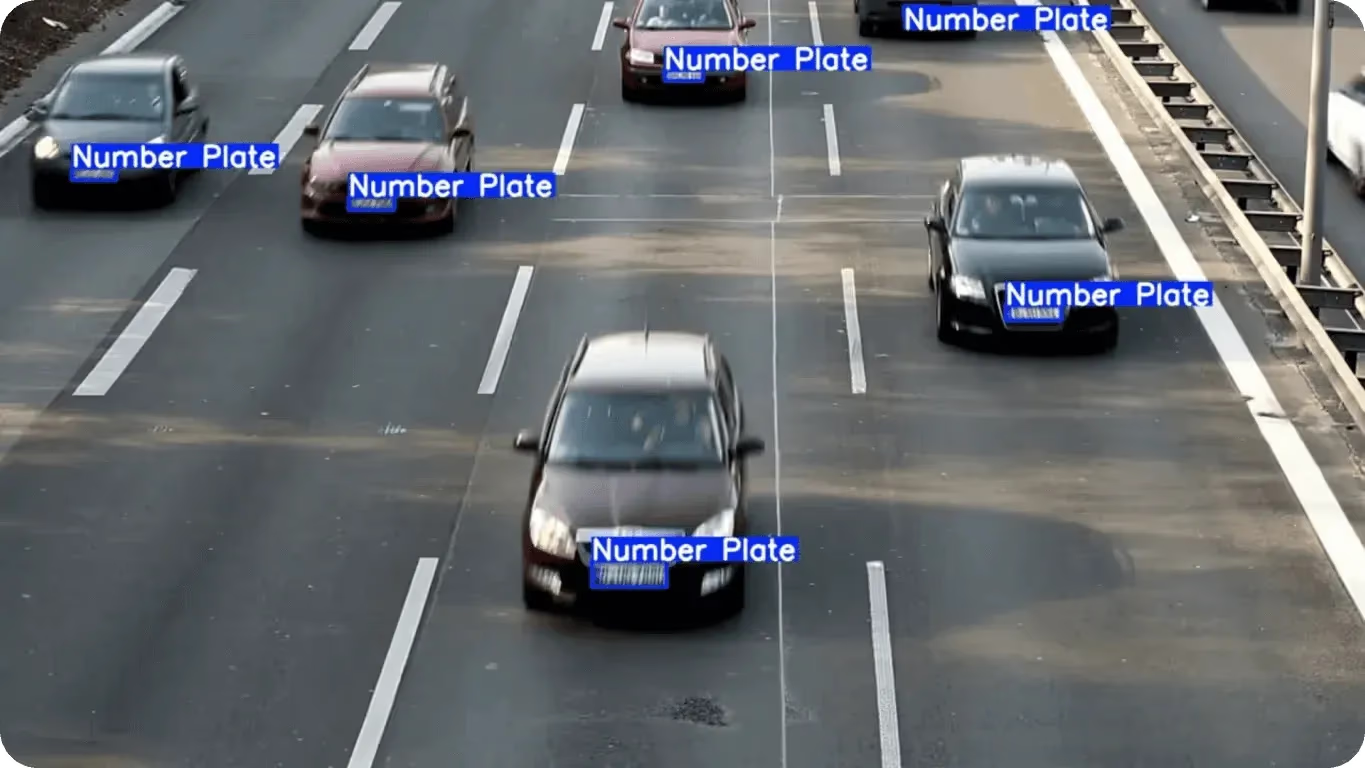
Şekil 1. Bir nesne algılama örneği. (Kaynak)
Geleneksel object detection önemlidir çünkü hem nesnenin ne olduğunu tanımlayan tanıma hem de görüntüde tam olarak nerede olduğunu belirleyen yerelleştirme işlevlerini sağlar. Bu kombinasyon, otonom araçlardan endüstriyel otomasyona ve sağlık teşhislerine kadar makinelerin gerçek dünyadaki karmaşık görevleri güvenilir bir şekilde gerçekleştirmesini sağlar.
Teknolojik gelişmeler sayesinde, nesne algılama modelleri gelişmeye devam ediyor; daha hızlı, daha doğru ve gerçek dünya ortamlarına daha uygun hale geliyorlar. Bu makalede, günümüzde mevcut olan en iyi nesne algılama modellerinden bazılarını inceleyeceğiz. Hadi başlayalım!
Link to this sectionNesne algılama ihtiyacı#
Computer vision tasks gibi görüntü sınıflandırma işlemleri, bir görüntünün araba, insan veya başka bir nesne içerip içermediğini anlamak için kullanılabilir. Ancak, nesnenin görüntü içinde tam olarak nerede olduğunu belirleyemezler.
Nesne algılama burada devreye girer. Nesne algılama modelleri, hangi nesnelerin mevcut olduğunu belirleyebilir ve ayrıca tam konumlarını saptayabilir. Yerelleştirme olarak bilinen bu süreç, otonom bir aracı durdurmak, bir robot kolunu yönlendirmek veya tıbbi görüntülemede bir alanı vurgulamak gibi durumlarda makinelerin sahneleri daha doğru anlamasını ve uygun şekilde tepki vermesini sağlar.
Derin öğrenmenin yükselişi, nesne algılamayı dönüştürdü. El ile kodlanmış kurallara güvenmek yerine, modern modeller desenleri doğrudan ek açıklamalar ve görsel verilerden öğrenirler. Bu veri kümeleri modellere nesnelerin neye benzediğini, genellikle nerede göründüklerini ve küçük nesneler, karmaşık sahneler veya değişen ışık koşulları gibi zorlukların nasıl yönetileceğini öğretir.
Aslında, son teknoloji nesne algılama sistemleri birden fazla nesneyi aynı anda doğru bir şekilde tespit edebilir. Bu da nesne algılamayı otonom sürüş, robotik, sağlık hizmetleri ve endüstriyel otomasyon gibi uygulamalarda kritik bir teknoloji haline getirir.
Link to this sectionNesne algılama görevleri nasıl çalışır?#
Bir nesne algılama modeline giriş verisi, bir kamera, video karesi ve hatta tıbbi taramadan gelebilecek bir görüntüdür. Giriş görüntüsü, görsel verideki desenleri tanımak üzere eğitilmiş, tipik olarak evrişimli bir sinir ağı (CNN) olan bir sinir ağından geçirilir.
Ağ içinde görüntü aşamalı olarak analiz edilir. Tespit ettiği özelliklere dayanarak, model hangi nesnelerin mevcut olduğunu ve nerede göründüklerini tahmin eder.
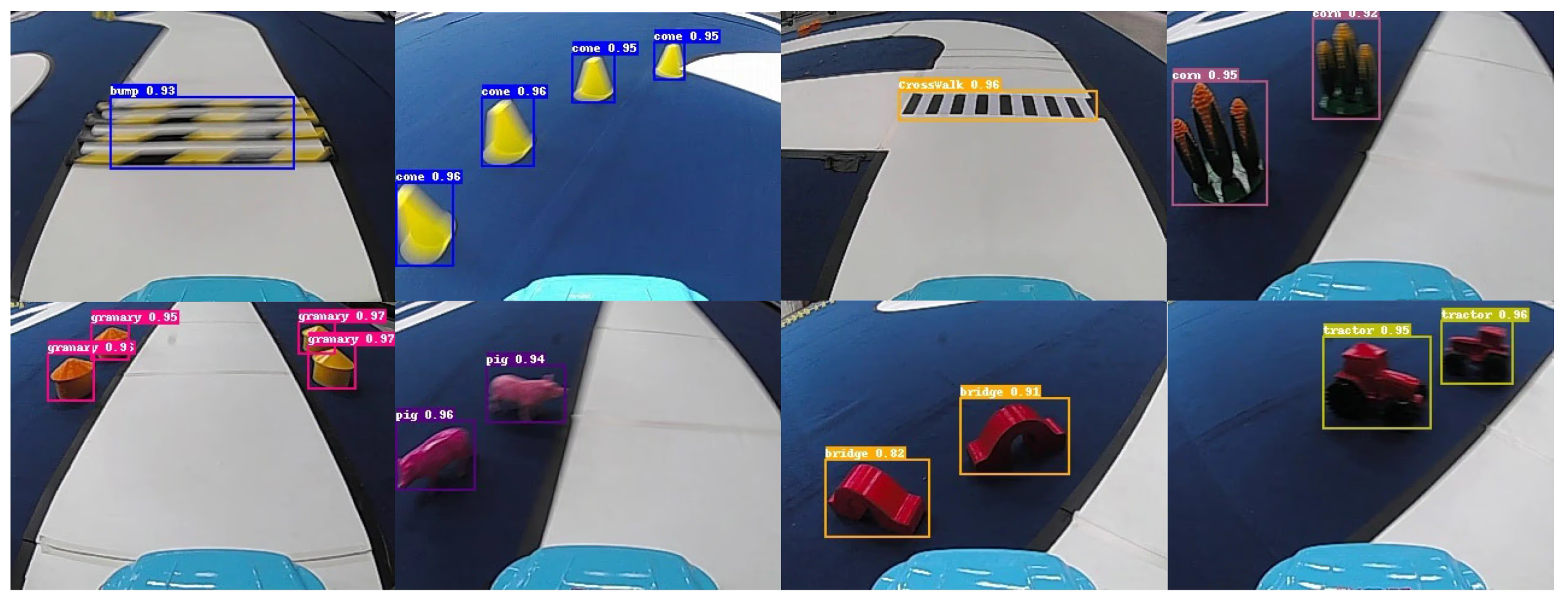
Bu tahminler, her bir tespit edilen nesnenin etrafına çizilen dikdörtgenler olan bounding box'lar kullanılarak temsil edilir. Model, her bounding box için bir sınıf etiketi (örneğin araba, kişi veya köpek) ve tahminle ilgili ne kadar emin olduğunu gösteren bir güven puanı (bu bir olasılık olarak da düşünülebilir) atar.
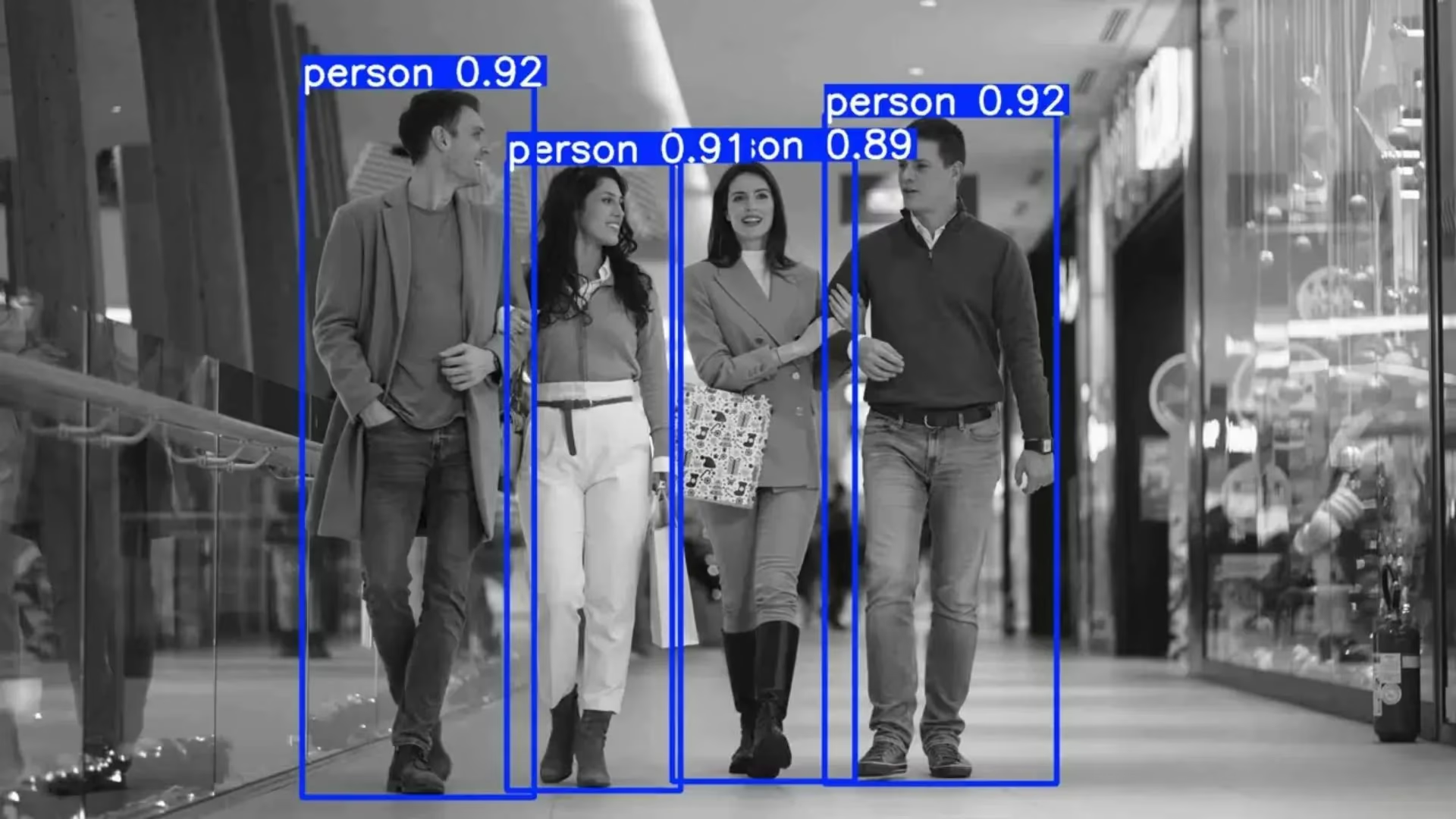
Şekil 2. Nesne algılama tahminleri bounding box'lar kullanılarak görselleştirilebilir.
Genel süreç, özellik çıkarmaya büyük ölçüde dayanır. Model; kenarlar, şekiller, dokular ve diğer ayırt edici özellikler gibi yararlı görsel desenleri tanımlamayı öğrenir. Bu desenler, ağın görüntüyü birden fazla ayrıntı düzeyinde anlamasına yardımcı olan özellik haritalarında kodlanır.
Link to this sectionNesneleri tespit etmek: İki aşamalı ve tek aşamalı#
Model mimarisine bağlı olarak, nesne dedektörleri hız, doğruluk ve karmaşıklığı dengeleyerek nesneleri bulmak için farklı stratejiler kullanır.
Birçok nesne algılama modeli, özellikle Faster R-CNN gibi iki aşamalı dedektörler, ilgi bölgeleri (ROI) adı verilen görüntünün belirli kısımlarına odaklanır. Bu alanlara yoğunlaşarak model, her pikseli eşit derecede analiz etmek yerine nesneleri içerme olasılığı daha yüksek olan bölgelere öncelik verir.
Öte yandan, ilk YOLO modelleri gibi tek aşamalı modeller, iki aşamalı modellerin yaptığı gibi belirli ROI'leri seçmezler. Bunun yerine görüntüyü bir ızgaraya bölerler ve tüm görüntüdeki nesneleri tek bir geçişte tahmin etmek için özellik haritalarıyla birlikte anchor box adı verilen önceden tanımlanmış kutular kullanırlar.
Günümüzde, son teknoloji nesne algılama modelleri anchor-free yaklaşımları keşfediyor. Önceden tanımlanmış anchor box'lara dayanan geleneksel tek aşamalı modellerin aksine, anchor-free modeller nesne konumlarını ve boyutlarını doğrudan özellik haritalarından tahmin eder. Bu, mimariyi basitleştirebilir, hesaplama yükünü azaltabilir ve özellikle farklı şekil ve boyutlardaki nesneleri tespit etmek için performansı artırabilir.
Link to this sectionEn iyi nesne algılama modellerine bir bakış#
Günümüzde, her biri belirli hedefler düşünülerek tasarlanmış birçok nesne algılama modeli bulunmaktadır. Bazıları gerçek zamanlı performans için optimize edilmişken, diğerleri en yüksek doğruluğa ulaşmaya odaklanır. Bir bilgisayarlı görü çözümü için doğru modeli seçmek genellikle özel kullanım durumunuza ve performans gereksinimlerinize bağlıdır.
Şimdi, 2026'nın en iyi nesne algılama modellerinden bazılarını keşfedelim.
Link to this sectionUltralytics YOLO modelleri#
Günümüzde en yaygın kullanılan nesne algılama modelleri ailelerinden biri Ultralytics YOLO model ailesidir. "You Only Look Once" (Sadece Bir Kez Bakarsın) anlamına gelen YOLO, hızlı, güvenilir ve üzerinde çalışması kolay olduğu için güçlü algılama performansı sunması nedeniyle endüstriler genelinde popülerdir.
Ultralytics YOLO ailesi; Ultralytics YOLOv5, Ultralytics YOLOv8, Ultralytics YOLO11 ve yakında çıkacak olan Ultralytics YOLO26 modellerini içerir ve farklı performans ve kullanım durumu gereksinimleri için çeşitli seçenekler sunar. Hafif tasarımları ve hız optimizasyonları sayesinde, Ultralytics YOLO modelleri gerçek zamanlı algılama için idealdir ve sınırlı bilgi işlem gücüne ve belleğe sahip uç cihazlarda dağıtılabilir.
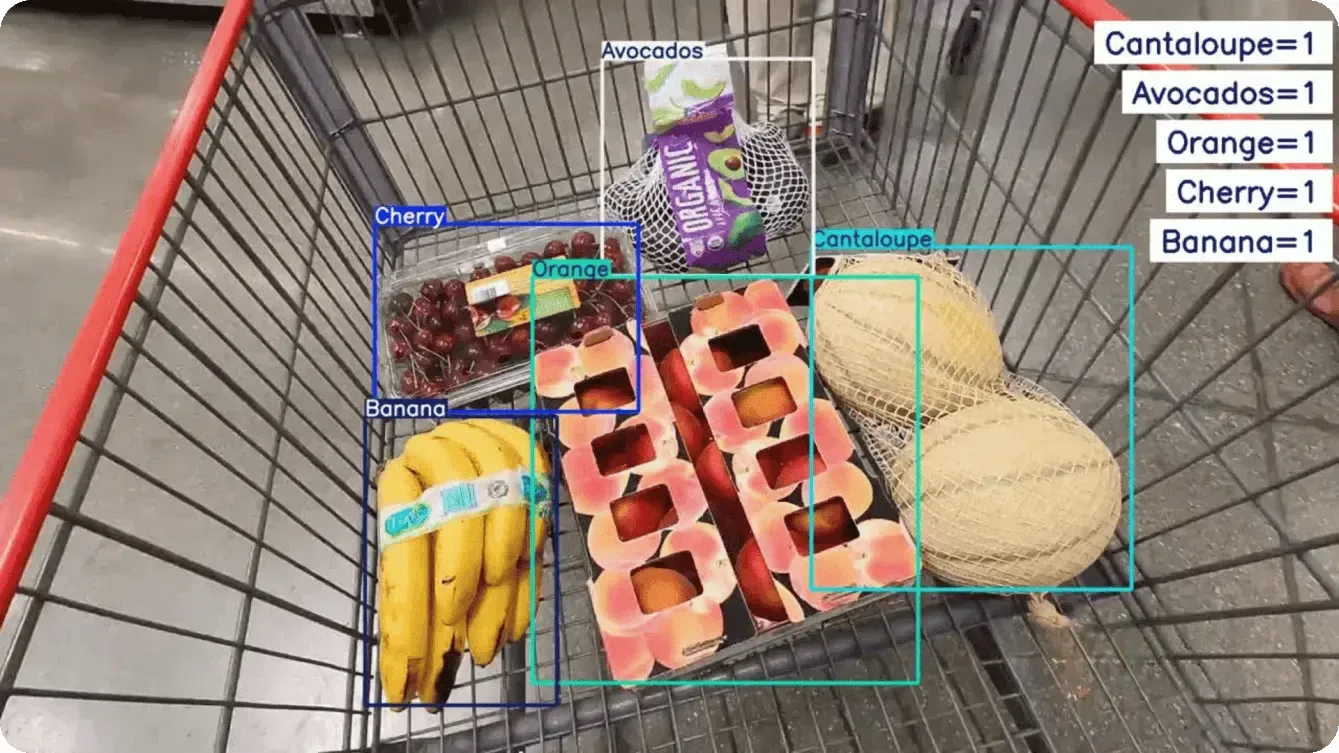
Şekil 3. Nesne algılama için Ultralytics YOLO11 kullanımı (Kaynak)
Temel nesne algılamanın ötesinde, bu modeller oldukça çok yönlüdür. Ayrıca, nesneleri piksel düzeyinde çizen instance segmentation ve insanlar veya nesneler üzerindeki kilit noktaları tanımlayan pose estimation gibi görevleri de desteklerler. Bu esneklik, Ultralytics YOLO modellerini tarım ve lojistikten perakende ve üretime kadar çok çeşitli uygulamalar için tercih edilen bir seçenek haline getirir.
Ultralytics YOLO modellerinin popülaritesinin bir diğer önemli nedeni, modelleri eğitmek, ince ayar yapmak ve dağıtmak için basit ve kullanıcı dostu bir arayüz sağlayan Ultralytics Python package'tır. Geliştiriciler, önceden eğitilmiş ağırlıklarla başlayabilir, modelleri kendi veri kümeleri için özelleştirebilir ve sadece birkaç satır kodla dağıtabilirler.
Link to this sectionRT-DETR ve RT-DETRv2#
RT-DETR (Real-Time Detection Transformer) ve daha yeni olan RT-DETRv2, gerçek zamanlı kullanım için oluşturulmuş nesne algılama modelleridir. Birçok geleneksel modelin aksine, bir görüntüyü alabilir ve non-maximum suppression (NMS) kullanmadan nihai tespitleri doğrudan verebilirler.
NMS, bir model aynı nesneyi birden fazla kez tahmin ettiğinde ekstra örtüşen kutuları kaldıran bir adımdır. NMS'yi atlamak, algılama sürecini daha basit ve daha hızlı hale getirir.
Bu modeller CNN'leri transformer'larla birleştirir. CNN, kenarlar ve şekiller gibi görsel detayları bulurken, transformer, görüntünün tamamına bir kerede bakabilen ve farklı parçaların birbiriyle nasıl ilişkili olduğunu anlayabilen bir sinir ağı türüdür. Bu kapsamlı anlayış, modelin birbirine yakın veya örtüşen nesneleri tespit etmesini sağlar.
RT-DETRv2, hem küçük hem de büyük nesneleri bulmaya yardımcı olan multi-scale detection ve karmaşık sahnelerin daha iyi yönetilmesi gibi özelliklerle orijinal modeli geliştirir. Bu değişiklikler, doğruluğu artırırken modelin hızlı kalmasını sağlar.
Link to this sectionRF-DETR#
RF-DETR, transformer mimarilerinin doğruluğunu gerçek dünya uygulamaları için gereken hızla birleştirmek üzere tasarlanmış, transformer tabanlı bir gerçek zamanlı modeldir. RT-DETR ve RT-DETRv2 gibi, tüm görüntüyü analiz etmek için bir transformer ve kenarlar, şekiller ve dokular gibi ince görsel özellikleri çıkarmak için bir CNN kullanır.
Model, nesneleri doğrudan giriş görüntüsünden tahmin eder, anchor box'ları ve NMS'yi atlar; bu da algılama sürecini basitleştirir ve çıkarımı hızlı tutar. RF-DETR ayrıca instance segmentation'ı destekleyerek bounding box'ları tahmin etmenin yanı sıra nesneleri piksel düzeyinde çizebilmesine olanak tanır.
Link to this sectionEfficientDet#
2019'un sonlarında piyasaya sürülen EfficientDet, verimli ölçeklendirme ve yüksek performans için tasarlanmış bir nesne algılama modelidir. EfficientDet'i diğerlerinden ayıran şey, sadece tek bir faktörü ayarlamak yerine giriş çözünürlüğünü, ağ derinliğini ve ağ genişliğini aynı anda ölçeklendiren bir yöntem olan compound scaling'dir. Bu yaklaşım, modelin yüksek performanslı görevler için ölçeklendirilmiş veya hafif dağıtımlar için küçültülmüş olması fark etmeksizin istikrarlı bir doğruluk sağlamasına yardımcı olur.
EfficientDet'in bir diğer önemli bileşeni, modelin görüntüleri birden fazla ölçekte analiz etmesine olanak tanıyan efficient feature pyramid network (FPN)'dir. Bu multi-scale analiz, farklı boyutlardaki nesneleri tespit etmek için çok önemlidir ve EfficientDet'in aynı görüntü içindeki hem küçük hem de büyük nesneleri güvenilir bir şekilde tanımlamasını sağlar.
Link to this sectionPP-YOLOE+#
2022'de piyasaya sürülen PP-YOLOE+, YOLO tarzı bir nesne algılama modelidir, yani görüntü üzerinde tek bir geçişte nesneleri tespit eder ve sınıflandırır. Bu yaklaşım, yüksek doğruluğu korurken onu hızlı ve gerçek zamanlı uygulamalar için uygun hale getirir.
PP-YOLOE+'daki önemli iyileştirmelerden biri, modelin güven puanlarının nesnelerin ne kadar doğru yerleştirildiğini yansıtmasına yardımcı olan task-aligned learning'dir. Bu özellikle küçük veya örtüşen nesneleri tespit etmek için kullanışlıdır.
Şekil 4. PP-YOLOE+ kullanarak nesneleri tespit etme (Kaynak)
Model ayrıca, nesne konumlarını tahmin etme ve sınıf etiketlerini belirleme görevlerini birbirinden ayıran bir decoupled head mimarisi kullanır. Bu, nesneleri doğru şekilde sınıflandırırken bounding box'ları daha hassas bir şekilde çizebilmesini sağlar.
Link to this sectionGroundingDINO#
GroundingDINO, görüyü ve dili birleştiren, transformer tabanlı bir nesne algılama modelidir. Sabit bir kategori kümesine güvenmek yerine, kullanıcıların doğal dil metin komutlarını kullanarak nesneleri tespit etmesine olanak tanır.
Bir görüntüden elde edilen görsel özellikleri metin açıklamalarıyla eşleştirerek, model, o kesin etiketler eğitim verisinde olmasa bile nesneleri bulabilir. Bu, modele "kask takan bir kişi" veya "binanın yanındaki kırmızı bir araba" gibi açıklamalarla komut verebileceğin ve eşleşen nesnelerin etrafında doğru bounding box'lar oluşturacağı anlamına gelir.
Ayrıca, zero-shot detection'ı destekleyerek, GroundingDINO modeli her yeni kullanım durumu için yeniden eğitme veya ince ayar yapma ihtiyacını azaltır ve bu da onu çok çeşitli uygulamalarda son derece esnek hale getirir. Dil anlama ve görsel tanımanın bu birleşimi, etkileşimli ve uyarlanabilir yapay zeka sistemleri için yeni olanaklar açar.
Link to this sectionNesne dedektörlerini değerlendirmek için kullanılan yaygın metrikler#
Çeşitli nesne algılama modellerini karşılaştırırken, hangisinin aslında en iyi performansı gösterdiğini nasıl anlayacağını merak ediyor olabilirsin. Bu iyi bir soru, çünkü model mimarisi ve verilerinin kalitesinin ötesinde, performansı etkileyebilecek birçok faktör vardır.
Araştırmacılar, modelleri tutarlı bir şekilde değerlendirmek, sonuçları karşılaştırmak ve hız ile doğruluk arasındaki ödünleşimleri anlamak için genellikle paylaşılan kıyaslamalara ve standart performans metriklerine güvenirler. Standart kıyaslamalar özellikle önemlidir çünkü birçok nesne algılama modeli COCO veri kümesi gibi aynı veri kümeleri üzerinde değerlendirilir.
Link to this sectionAlgılama doğruluğunu ve hızını ölçme#
İşte nesne algılama modellerini değerlendirmek için kullanılan bazı yaygın metrikler:
- Intersection over union (IoU): Bu metrik, tahmin edilen bir bounding box'ın görüntüdeki gerçek nesneyle ne kadar örtüştüğünü ölçer. Model tarafından çizilen kutuyu, veri kümesinde etiketlendiği gibi nesnenin konumu olan ground-truth kutusu ile karşılaştırır. IoU, örtüşme alanının iki kutunun birleşim alanına bölünmesiyle hesaplanır. Daha yüksek bir IoU, modelin kutuyu daha doğru yerleştirdiğini gösterirken, daha düşük bir IoU tahminin daha az hassas olduğu anlamına gelir. Basit bir ifadeyle IoU, modelin tahminlerinin gerçek nesne konumlarıyla ne kadar yakından eşleştiğini gösterir.
- Mean average precision (mAP): Genel nesne algılama performansını değerlendirmek için kullanılan birincil metriktir. Modelin kaç nesneyi doğru tespit ettiğini ve bu tespitlerin farklı güven düzeyleri ve nesne kategorileri genelindeki doğruluğunu dikkate alır.
- Frames per second (FPS) ve gecikme: FPS, bir modelin bir saniyede kaç görüntü veya video karesini işleyebileceğini gösterir. Örneğin, 30 FPS'de çalışan bir model her saniye 30 kareyi işleyebilir. Daha yüksek FPS, sistemin daha hızlı tepki verebileceği anlamına gelir; bu da canlı video, trafik izleme veya robotik gibi kullanım durumları için önemlidir. Gecikme ise, modelin tek bir görüntü veya kareyi, alındığı andan sonucun hazır olduğu ana kadar işlemesinin ne kadar sürdüğünü ölçer.
Link to this sectionNesne algılama algoritmalarını kullanmanın avantajları ve dezavantajları#
İşte gerçek dünya uygulamalarında nesne algılama modellerini kullanmanın temel avantajlarından bazıları:
- Endüstriler genelinde ölçeklenir: Nesne algılama, trafik izleme ve perakende analitiğinden sağlık, tarım ve üretime kadar çok çeşitli kullanım durumlarına uygulanabilir.
- Manuel çabayı azaltır: Görsel inceleme ve izleme görevlerinin otomatikleştirilmesi, sürekli insan gözetimi ihtiyacını azaltır ve ekiplerin daha yüksek değerli çalışmalara odaklanmasına yardımcı olur.
- Açık kaynak ekosistemlerinden yararlanır: GitHub'daki aktif açık kaynak toplulukları ve kaynakları, önceden eğitilmiş modellere erişmeyi, denemeler yapmayı ve çözümleri özelleştirmeyi kolaylaştırır.
Bu artılara rağmen, nesne algılama modellerinin performansını etkileyebilecek pratik sınırlamalar vardır. İşte dikkate alman gereken bazı hayati faktörler:
- Yüksek kaliteli veri gereksinimleri: Nesne algılama modelleri, eğitim için büyük, iyi açıklanmış veri kümelerine dayanır. Bu verileri oluşturmak ve sürdürmek zaman alıcı, maliyetli ve ölçeklendirilmesi zor olabilir.
- Hesaplama talepleri: Daha yüksek algılama doğruluğu sağlayan modeller, hem eğitim hem de gerçek zamanlı dağıtım sırasında genellikle önemli miktarda işlem gücü gerektirir. Bu da tipik olarak altyapı maliyetlerini artırabilen yüksek performanslı GPU'ların kullanılmasını gerektirir.
- Gerçek dünya koşullarına duyarlılık: Işıklandırma, kamera açıları, hava durumu ve kalabalık sahnelerdeki değişiklikler algılama performansını etkileyebilir, bu da sürekli test ve ayarlamayı gerekli kılar.
Link to this sectionÖne çıkanlar#
Bilgisayarlı görü projen için en iyi nesne algılama modeli; kullanım durumuna, veri kurulumuna, performans gereksinimlerine ve donanım kısıtlamalarına bağlıdır. Bazı modeller hız için optimize edilmişken, diğerleri doğruluğa odaklanır ve çoğu gerçek dünya uygulaması her ikisinin bir dengesine ihtiyaç duyar. GitHub'daki açık kaynaklı çerçeveler ve aktif topluluklar sayesinde, bu modellerin pratik kullanım için değerlendirilmesi, uyarlanması ve dağıtılması kolaylaşıyor.
Daha fazla bilgi edinmek için GitHub repository sayfamızı keşfet. Community sayfamıza katıl ve AI in healthcare ve computer vision in the automotive endüstrisi gibi uygulamalar hakkında okumak için çözümler sayfalarımıza göz at. Görsel yapay zeka ile hemen çalışmaya başlamak için licensing options seçeneklerimizi keşfet.






