Ultralytics YOLO26'nın daha hızlı, uç öncelikli tasarımının etkisi
Ultralytics YOLO26'nın uçta nasıl daha hızlı olduğunu ve bunun neden düşük gecikme süresi ve verimlilik talep eden yeni nesil bilgisayarlı görü uygulamaları için önemli olduğunu gör.
Bu haftanın başlarında Ultralytics, bilgisayarlı görü sistemlerinin uç noktalarda (edge) performansını yeniden tanımlamayı amaçlayan daha hızlı, daha hafif ve daha küçük bir YOLO modeli olan Ultralytics YOLO26'yı resmen piyasaya sürdü. YOLO26, nesne tespiti ve örnek segmentasyonu dahil olmak üzere önceki YOLO modelleriyle aynı temel görü görevlerini destekliyor.

Şekil 1. Bir nesneyi segmentlemek için YOLO26 kullanımına bir örnek.
YOLO26 ile önceki modeller arasındaki belirleyici fark, çalışmak üzere tasarlandığı ortamdır. YOLO26, öncelikle bulut grafik işlem birimleri (GPU'lar) veya kıyaslama odaklı performans için optimize edilmek yerine, uç cihazlarda ve gömülü donanımlarda gerçek dünya dağıtımı için sıfırdan tasarlandı.
Bilgisayarlı görü araştırmalardan üretime geçtikçe, performans kısıtlamalarının gerçekliği daha net hale geliyor. Uç ortamlar; sıkı gecikme bütçeleri, sınırlı bellek, güç ve termal kısıtlamalar ve farklı platformlarda öngörülebilir davranış ihtiyacı ile şekillenir.
Bu ayarlarda, toplam sistem performansı sadece ham çıkarım hızına değil, aynı zamanda tüm işlem hattının ne kadar verimli çalıştığına da bağlıdır. İşlem sonrası (post-processing) yükü, bellek baskısı ve platforma özel yürütme yolları genellikle darboğazlardır.
YOLO26, bireysel model metrikleri yerine tüm çıkarım hattına bakan daha hızlı ve uç nokta odaklı bir yaklaşım benimseyerek bu zorlukları ele alır. Uç nokta optimizasyonuna odaklanarak, çıkarım hattını basitleştirerek ve gereksiz işlem sonrası adımlarını kaldırarak YOLO26, üretimde daha düşük gecikme süresi ve daha güvenilir davranış sağlayan hız iyileştirmeleri sunar.
Bu makalede, YOLO26'nın mimari tercihlerinin gerçek dünyadaki performans iyileştirmelerine nasıl dönüştüğünü ve uç noktalarda daha hızlı olmanın yeni nesil bilgisayarlı görü uygulamaları için neleri mümkün kıldığını temelden nasıl değiştirdiğini keşfedeceğiz.
Link to this sectionUç nokta dağıtımının gerçekliği#
Bilgisayarlı görü modellerini uç noktada çalıştırmak, bulutta çalıştırmaktan çok farklıdır. Bulut ortamlarında sistemler genellikle güçlü GPU'lara, büyük miktarda belleğe ve kararlı donanıma erişebilir. Uç noktada ise aynı varsayımlar geçerli değildir.
Çoğu uç nokta dağıtımı, GPU'lar yerine çeşitli donanım mimarilerinde çalışır. Cihazlar genellikle, bulut GPU'larının ham bilgi işlem kapasitesinden ziyade verimlilik ve düşük güç için optimize edilmiş, farklı görevler için özelleşmiş birden fazla işlemci kullanır.
Gecikme süresi bir diğer önemli kısıtlamadır. Uç sistemler genellikle küçük gecikmelerin bile yanıt verebilirliği veya güvenliği etkileyebileceği sıkı gerçek zamanlı limitler altında çalışır. Bu durumlarda, uçtan uca gecikme, ham çıkarım hızından daha önemlidir. Bir model kağıt üzerinde hızlı olabilir ancak işlem sonrası adımlar ve veri hareketi eklendiğinde yetersiz kalabilir.
Bellek de büyük bir rol oynar. Birçok uç cihazın sınırlı belleği ve paylaşılan önbellekleri vardır. Büyük ara tensörler ve verimsiz bellek kullanımı, modelin kendisi verimli olsa bile sistemleri yavaşlatabilir.
Güç ve termal limitler ek kısıtlamalar getirir. Uç cihazlar genellikle aktif soğutma olmadan ve sabit güç bütçeleri dahilinde çalışır. Performansın sadece kısa süreli patlamalarla hızlı değil, aynı zamanda verimli ve sürdürülebilir olması gerekir.
Tüm bunların ötesinde, uç nokta dağıtımları tutarlılık gerektirir. Modellerin cihazlar ve çalışma zamanları genelinde aynı şekilde davranması gerekir. Platforma özel kodlar veya karmaşık işlem sonrası adımları, sistemlerin dağıtılmasını ve bakımını zorlaştıran ince farklılıklar ortaya çıkarabilir.
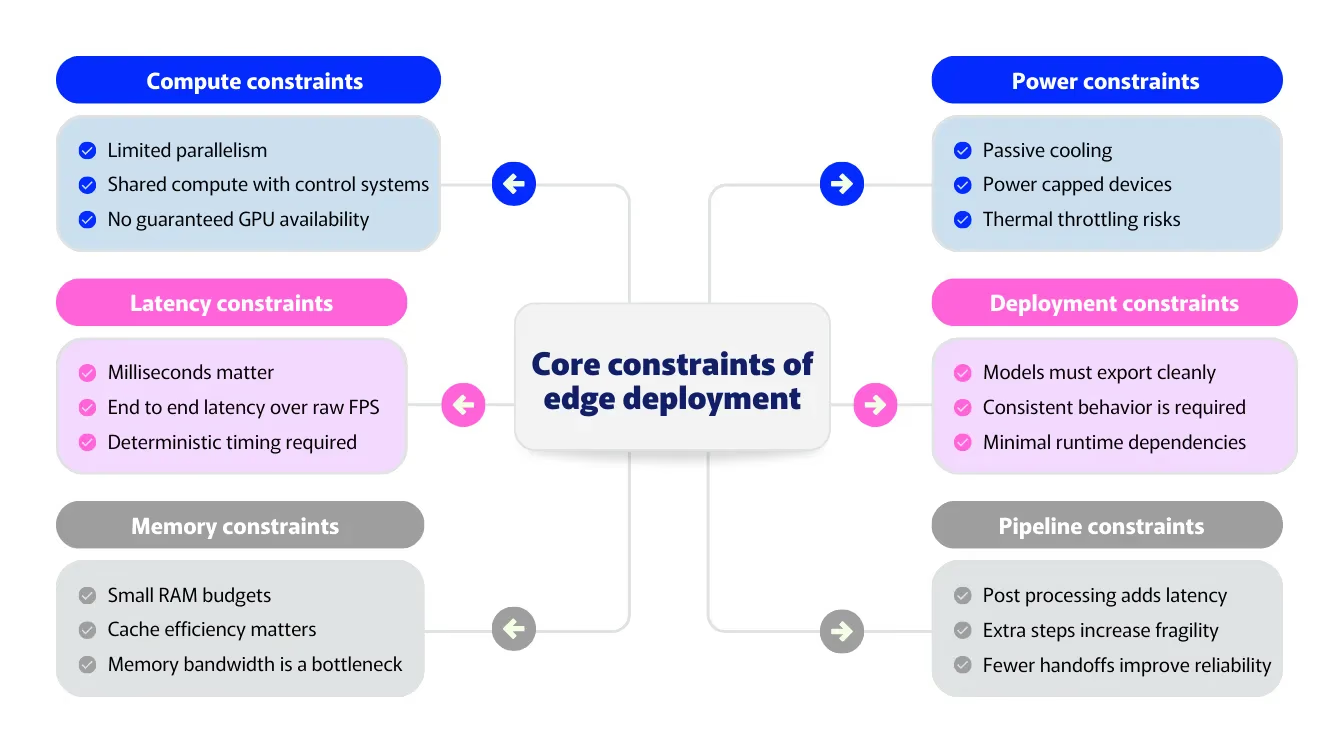
Şekil 2. Uç nokta dağıtımının kısıtlamalarına bir bakış. Görsel: Yazar.
Bu kısıtlamalar, uç noktada performansın gerçekten ne anlama geldiğini tanımlar. Başka bir deyişle, performans tek bir metrikle değil, tüm işlem hattı ile tanımlanır.
Link to this sectionUç nokta görüsü neden farklı bir performans modeli gerektirir?#
Peki, uç nokta dağıtımının kısıtlamaları, uç nokta için oluşturulmuş bir bilgisayarlı görü modelinin gereksinimleriyle nasıl ilişkilidir? Modeller araştırma ortamlarından gerçek dünya sistemlerine taşındığında bağlantı netleşir.
Bulut ortamlarında performans genellikle çıkarım hızı ve doğruluk gibi kıyaslamalar kullanılarak ölçülür. Uç noktada bu metrikler hikayenin sadece bir kısmını anlatır. Görü sistemleri tipik olarak, sinir ağı çıkarımının özelleşmiş hızlandırıcılara aktarıldığı, işlem hattının diğer kısımlarının ise genel amaçlı işlemcilerde çalıştığı heterojen donanımlar üzerinde çalışır.
Bu bağlamda model hızı yeterli değildir. Model dağıtıldıktan sonra tüm sistemin nasıl performans gösterdiği anahtardır. Bir model kendi başına hızlı görünebilir, ancak işlem sonrası adımlar, veri hareketi veya platforma özel adımlar ek yük getirirse yine de yetersiz kalabilir.
İşte bu yüzden uç nokta görüsü, izole kıyaslamalar yerine sistem düzeyinde verimliliğe odaklanan bir performans modeli gerektirir. YOLO26, uç nokta odaklı optimizasyona, kolaylaştırılmış çıkarıma ve gerçek dünya dağıtımı için oluşturulmuş uçtan uca yürütmeye odaklanarak bu değişimi yansıtır.
Link to this sectionHızın temeli: Uç nokta odaklı bir tasarım#
Uç noktada performans, bir modelin cihazın gerçek donanım mimarisine ne kadar iyi eşlendiği ile tanımlanır. Önce uç nokta için tasarım yapmak, mevcut işlem birimlerinin özel kombinasyonuna bakılmaksızın görü sistemlerinin gerçek dünya platformlarında güvenilir bir şekilde çalışmasını sağlar.
Uç nokta odaklı bir yaklaşım, bulut GPU'ları için optimize edilmiş modelleri sonradan uyarlamak yerine, heterojen donanımlarda öngörülebilir ve verimli yürütmeye öncelik verir. Basitçe ifade etmek gerekirse bu, sinir ağı hızlandırıcılarına iyi çevrilen işlemleri tercih etmek, model dışındaki sinir ağı dışı çalışmaları en aza indirmek ve uçtan uca yürütmeyi yavaşlatabilecek gereksiz karmaşıklığı azaltmak anlamına gelir.
YOLO26 bu kısıtlamalar dikkate alınarak tasarlandı. Mimarisi, ideal koşullar altında zirve verimi yerine tutarlı performansa odaklanır. Yürütme yollarını basitleştirerek ve gereksiz hesaplamaları ortadan kaldırarak YOLO26, çıkarım hattındaki ek yükü azaltır ve cihazın mevcut hızlandırma ve bellek hiyerarşisinden daha iyi yararlanır.
Bu yaklaşım aynı zamanda güvenilirliği de artırır. Uç nokta odaklı optimizasyon, gerçek zamanlı sistemler için kritik olan daha öngörülebilir zamanlamaya ve daha az performans dalgalanmasına yol açar. Hız elde etmek için özelleşmiş donanıma veya yoğun işlem sonrası adımlara güvenmek yerine YOLO26, tüm çıkarım hattında verimliliği vurgular.
Link to this sectionUçtan uca çıkarım ve işlem sonrası adımlarının maliyeti#
Gereksiz işlem sonrası adımlarını ortadan kaldırmanın ne anlama geldiğini merak ediyor olabilirsin. Bunu anlamak için bir adım geri çekilelim ve geleneksel nesne tespiti sistemlerinin nasıl çalıştığına bakalım.
Birçok nesne tespiti hattında çıkarım, model tahminlerini ürettiğinde bitmez. Bunun yerine model, daha sonra kullanılabilecekleri şekilde filtrelenmesi ve iyileştirilmesi gereken çok sayıda örtüşen sınırlayıcı kutu (bounding box) çıktısı verir. Bu temizlik, modelin dışında çalışan işlem sonrası adımlarıyla gerçekleşir.
En yaygın işlem sonrası adımlarından biri Non-Maximum Suppression veya NMS'dir. NMS, örtüşen sınırlayıcı kutuları karşılaştırır ve yalnızca en yüksek güvene sahip tespitleri tutarak aynı nesneye işaret eden kopyaları kaldırır. Bu yaklaşım etkili olsa da çıkarım tamamlandıktan sonra ekstra hesaplama getirir.
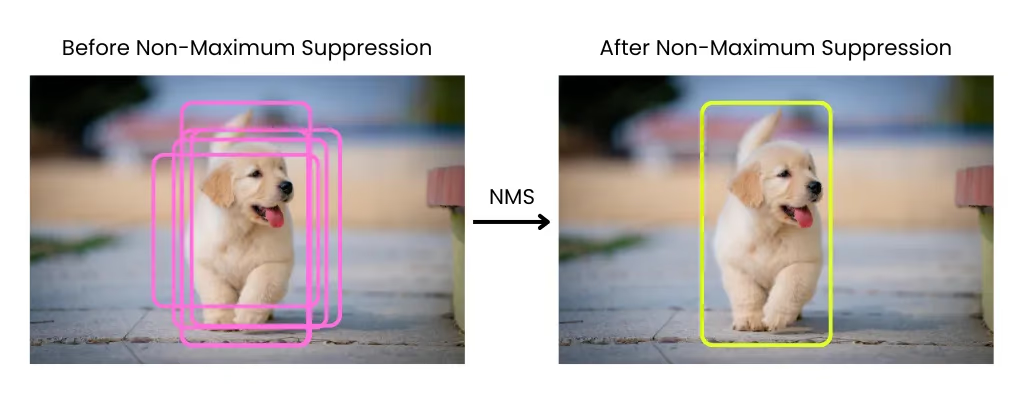
Şekil 3. NMS'yi anlamak. Görsel: Yazar.
Uç noktada bu ekstra işin bir maliyeti vardır. NMS gibi işlem sonrası adımları, kontrol odaklı veya bellek yoğun işlemlerden ziyade yoğun sinir ağı hesaplaması için optimize edilmiş sinir ağı çıkarımı için kullanılan özelleşmiş hızlandırıcılara pek uygun değildir.
Sonuç olarak NMS, ek gecikme ve bellek yükü getirir ve maliyeti tespit sayısı arttıkça artar. Modelin kendisi hızlı olsa bile NMS yine de toplam çalışma süresinin önemli bir kısmını tüketebilir.
İşlem sonrası adımları aynı zamanda sistem karmaşıklığını da artırır. Modelin dışında yer aldığı için, farklı çalışma zamanları ve donanım hedefleri için ayrı ayrı uygulanması gerekir. Bu durum genellikle platforma özel kod yollarına, cihazlar genelinde tutarsız davranışlara ve daha kırılgan dağıtım hatlarına yol açar.
En önemlisi, işlem sonrası adımları gerçek uçtan uca performans fikrini bozar. Model çıkarım hızını ölçmek, sistemin üretimde nasıl davrandığını yansıtmaz. Nihayetinde önemli olan, hattaki her adım dahil olmak üzere girdiden nihai çıktıya kadar geçen toplam süredir.
Bu durumlarda işlem sonrası adımları uç noktada gizli bir darboğaz haline gelir. Modelin kendisinin dışında yer alırken gecikme ekler, CPU kaynaklarını tüketir ve dağıtımı karmaşıklaştırır.
Link to this sectionYOLO26, NMS'yi nasıl kaldırır ve bu neden onu daha hızlı yapar?#
YOLO26, NMS'yi kaldırır; kopya tespitleri çıkarımdan sonra temizlemek yerine sorunun kökenine odaklanarak bu işlemi gerçekleştirir. Filtrelenmesi gereken birçok örtüşen tahmin üretmek yerine model, doğrudan daha küçük bir güvenilir, nihai tespit kümesi oluşturacak şekilde eğitilir.
Bu, eğitim sırasında tespitlerin nasıl öğrenildiğinin değiştirilmesiyle mümkün kılınmıştır. YOLO26, nesneler ve tahminler arasında daha net bir bire bir ilişkiyi teşvik ederek yedekliliği kaynağında azaltır. Sonuç olarak kopya tespitler, harici işlem sonrası adımları yerine ağın kendi içinde çözülür.
NMS'yi kaldırmanın uç nokta performansında anında bir etkisi olur. NMS sinir ağı hızlandırıcılarına iyi eşlenmediğinden, onu ortadan kaldırmak bellek hareketini azaltır ve pahalı sinir ağı dışı işleme adımlarından kaçınır. Bu, uçtan uca gecikmeyi düşürür ve özellikle işlem sonrası adımlarının aksi takdirde toplam çalışma süresinin önemli bir kısmını tüketebileceği uç cihazlarda performansı daha öngörülebilir hale getirir.
Ayrıca çıkarım hattını basitleştirir. Modelin dışında daha az adım olmasıyla, daha az veri hareketi ve bileşenler arasında daha az el değişimi olur. Modelin çıktısı zaten nihai sonuçtur, bu da yürütmeyi daha öngörülebilir hale getirir.
Link to this sectionGerçek uçtan uca performansı sağlamak için DFL'nin kaldırılması#
YOLO26'daki bir diğer yenilik, daha önceki YOLO modellerinde sınırlayıcı kutu regresyonu için kullanılan Distribution Focal Loss veya DFL'nin kaldırılmasıdır. DFL kullanan modeller, doğrudan tek bir koordinat tahmin etmek yerine, olası değerlerin bir dağılımını öğrenmiş ve ardından bu dağılımdan nihai bir sınırlayıcı kutu türetmiştir. Bu yaklaşım, yerelleştirme doğruluğunu artırmaya yardımcı olmuş ve önceki nesillerde önemli bir ileri adımdı.
Ancak zamanla DFL, ödünleşimler de getirdi. Dağılımları tahmin etmek hesaplamayı artırır ve model mimarisine karmaşıklık katar; bu da CPU'larda çıkarımı yavaşlatabilir ve modellerin dağıtım formatları arasında dışa aktarılmasını zorlaştırabilir. DFL ayrıca, çok büyük nesneleri tespit ederken esnekliği sınırlayabilen sabit regresyon aralıkları dayatıyordu.
YOLO26, daha basit ve uçtan uca bir tasarıma geçişinin bir parçası olarak DFL'yi kaldırır. Sınırlayıcı kutu regresyonu daha doğrudan olacak şekilde yeniden tasarlanmış, doğruluk korunurken gereksiz hesaplama azaltılmıştır. Bu değişiklik, YOLO26'nın NMS'siz yaklaşımıyla uyumludur.
Link to this section%43 daha hızlı CPU çıkarımı nereden geliyor?#
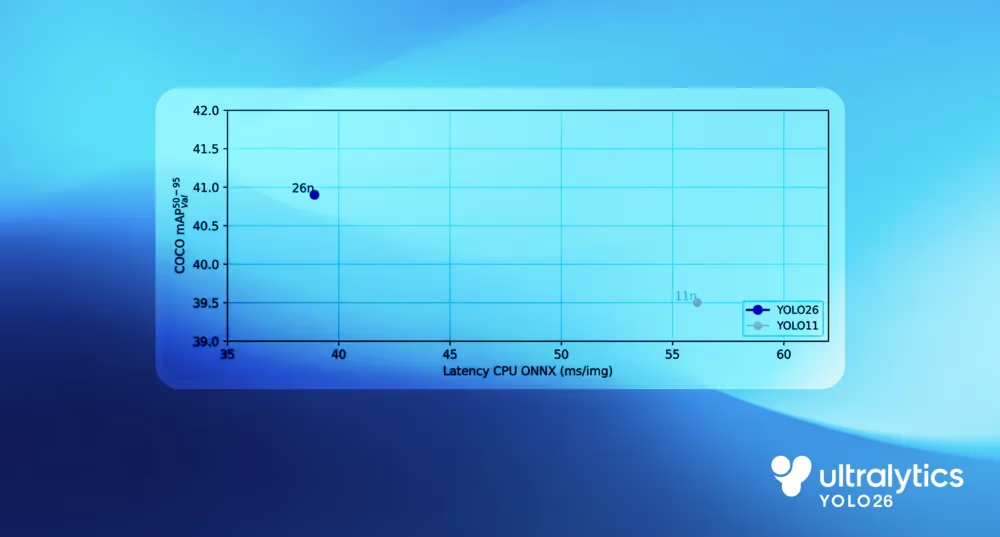
CPU tabanlı kıyaslamalarda YOLO26, önceki YOLO modellerine göre net bir performans iyileşmesi gösterir. Ultralytics YOLO11 ile karşılaştırıldığında, YOLO26 nano modeli %43'e kadar daha hızlı CPU çıkarımı sağlar; bu fark, gerçek dünya uç nokta dağıtımlarında anlamlı bir etkiye sahiptir.
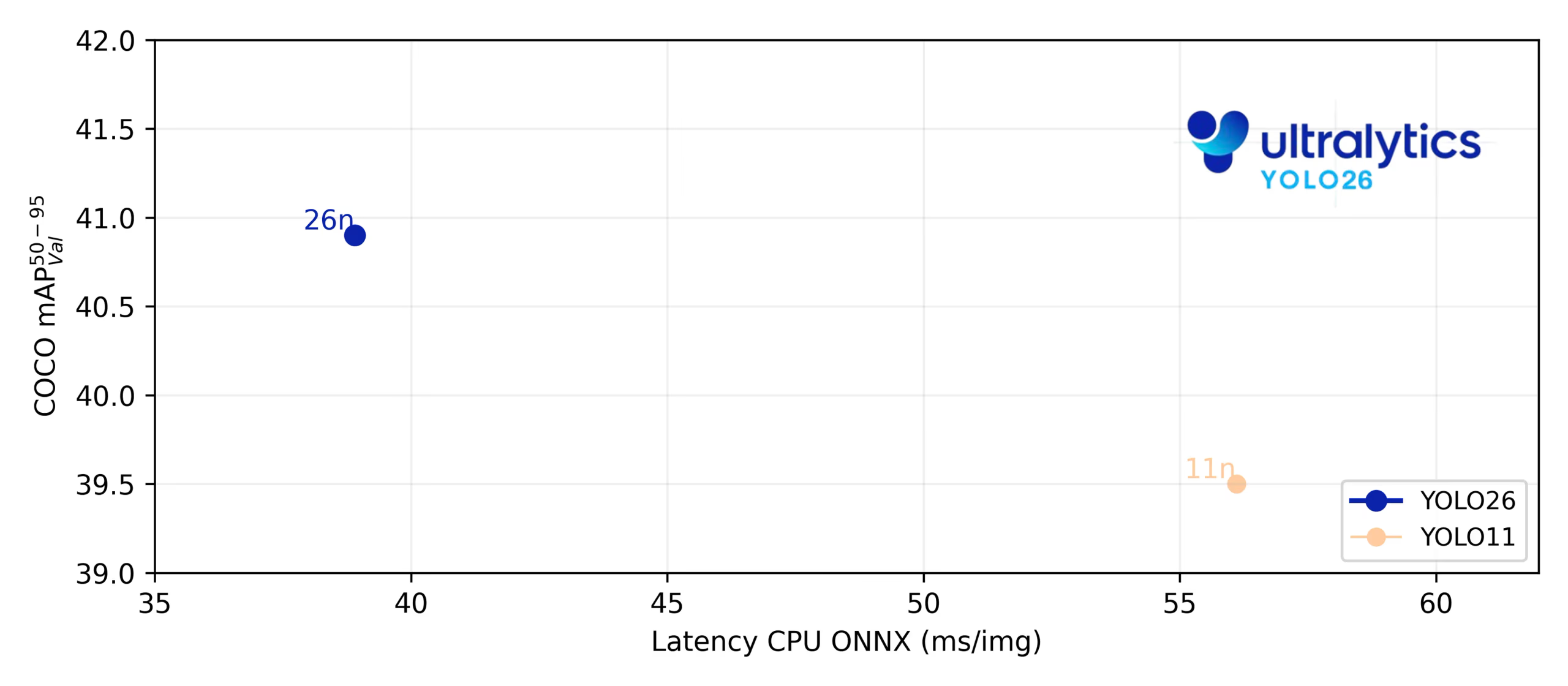
Şekil 4. YOLO26 CPU Hızını kıyaslama.
Bu kazanım, tek bir bileşeni optimize etmek yerine tüm çıkarım hattını basitleştirmekten gelir. Uçtan uca yürütme işlem sonrası ek yükünü kaldırır, daha doğrudan bir sınırlayıcı kutu regresyon yöntemi hesaplamayı azaltır ve CPU odaklı tasarım tercihleri genel amaçlı işlemcilerde yürütme verimliliğini artırır.
Bu değişiklikler birlikte gecikmeyi azaltır, CPU iş yükünü düşürür ve gerçek dünya uç nokta donanımında daha hızlı, daha tutarlı performansa yol açar.
Link to this sectionYOLO26'nın uç nokta dağıtımı ve dışa aktarımlar üzerindeki etkisi#
YOLO26'nın performans kazanımları, daha hızlı çıkarımın ötesine geçer. Modeli basitleştirerek ve bellek yükünü azaltarak, uç ortamlarda dağıtımı daha kolay ve çalıştırılması daha güvenilir hale gelir.
YOLO26'nın uçtan uca tasarımı, dışa aktarımı da basitleştirir. Daha az yardımcı bileşen ve harici işlem sonrası adımları olmaması sayesinde, dışa aktarılan modeller tamamen kendi kendine yeterlidir. Bu, platforma özel bağımlılıkları azaltır ve çalışma zamanları ile donanım hedefleri genelinde tutarlı davranış sağlamaya yardımcı olur.
Uygulamada bu, YOLO26'nın çeşitli dışa aktarım formatları kullanılarak kameralar, robotlar ve gömülü sistemler gibi uç cihazlara daha kolay dağıtılabileceği anlamına gelir. Dışa aktardığın şey, daha az entegrasyon adımı ve daha az dağıtım kayması riskiyle çalıştırdığın şeydir.
Link to this sectionDaha hızlı uç nokta çıkarımı, robotik ve endüstriyel görü yapay zekasını mümkün kılar#
Şimdiye kadar YOLO26'nın uç nokta odaklı tasarımının performansı sistem düzeyinde nasıl iyileştirdiğine baktık. Ancak gerçek etki, görü yapay zekasını gerçek dünya uygulamalarına entegre etmeyi nasıl kolaylaştırdığıdır.
Örneğin, robotik ve endüstriyel ortamlarda görü sistemleri genellikle katı gerçek zamanlı kısıtlamalar altında çalışır. Kararların hızlı ve tutarlı bir şekilde, sınırlı bilgi işlem gücü kullanılarak ve bulut bağlantısına güvenmeden verilmesi gerekir. Ultralytics YOLO26 ile bu gereksinimleri karşılamak pratik hale gelir.
Robot navigasyonu ve nesne manipülasyonu gibi uygulamalar, daha düşük gecikme ve daha öngörülebilir çıkarımdan yararlanarak robotların ortamlarındaki değişikliklere sorunsuz bir şekilde yanıt vermesini sağlar. Benzer şekilde endüstriyel ayarlarda, görü modelleri doğrudan üretim hatlarında çalışarak gecikmelere veya ek karmaşıklığa neden olmadan kusurları tespit edebilir, bileşenleri izleyebilir ve süreçleri izleyebilir.
Uç nokta donanımında hızlı, güvenilir çıkarımı mümkün kılarak YOLO26, görü yapay zekasının dağıtılması ve bakımı zor bir zorluk olmaktan ziyade robotik ve endüstriyel sistemlerin doğal bir parçası haline gelmesine yardımcı olur.
Link to this sectionÖne çıkanlar#
YOLO26, gecikme, bellek ve güvenilirlik gibi gerçek dünya kısıtlamalarının nelerin mümkün olduğunu tanımladığı uç nokta için oluşturuldu. Modeli CPU odaklı yürütme, uçtan uca çıkarım ve daha basit dağıtım etrafında tasarlayan YOLO26, görü yapay zekasını gerçek sistemlere entegre etmeyi pratik hale getirir. Bu uç nokta odaklı yaklaşım, performans ve öngörülebilirliğin en önemli olduğu robotik ve endüstriyel görüden gömülü ve cihaz içi yapay zekaya kadar çok çeşitli uygulamaları mümkün kılar.
Büyüyen topluluğumuza katıl ve uygulamalı yapay zeka kaynakları için GitHub depomuzu keşfet. Bugün görü yapay zekası ile bir şeyler inşa etmek için lisanslama seçeneklerimizi incele. Çözüm sayfalarımızı ziyaret ederek tarımda yapay zekanın tarımı nasıl dönüştürdüğünü ve sağlık hizmetlerinde görü yapay zekasının geleceği nasıl şekillendirdiğini öğren.






