En iyi 8 açık kaynak nesne izleme aracı ve algoritması
Gerçek zamanlı video analizi için en iyi 8 açık kaynak nesne izleme aracını keşfet. Her birinin nasıl çalıştığını ve projen için doğru olanı nasıl seçeceğini gör.
Bir araba kırmızı ışıkta geçtiğinde ve sürücüye otomatik bir ceza gönderildiğinde ya da bir futbolcu sahada top sürerken kamera akıcı bir şekilde oyunu takip ettiğinde, yapay zeka arka planda sessizce çalışıyor demektir. Özellikle bu sistemler, makinelerin dünyadan gelen görsel bilgileri görmesini, yorumlamasını ve anlamasını sağlayan bir yapay zeka alt dalı olan bilgisayarlı görü üzerine kuruludur.
Bilgisayarlı görü içinde, bu uygulamaların arkasındaki temel görevlerden biri nesne takibi dir. Bu, bir videonun her karesindeki nesneleri tanımlamak ve ardından bu nesneler hareket ederken, diğerleriyle çakışırken veya yön değiştirirken onları takip etmek için kullanılır.
Günümüzde farklı kullanım durumları, performans ihtiyaçları ve karmaşıklık seviyeleri için tasarlanmış birçok nesne takibi aracı ve algoritması mevcuttur. Bazıları hıza odaklanır ve gerçek zamanlı olarak düzinelerce nesneyi takip edebilir; diğerleri ise tıkanma, hızlı hareket veya düşük ışık gibi zorlu koşullarda doğruluğa veya uzun vadeli kararlılığa öncelik verir.
Özellikle, açık kaynaklı projeler bu alanın ilerlemesinde büyük bir rol oynamıştır. Kodları açıkça erişilebilir olduğundan, geliştiriciler ve araştırmacılar bunların nasıl çalıştığını inceleyebilir, mevcut yöntemleri geliştirebilir ve bunları yeni uygulamalara uyarlayabilirler. Bu açıklık, nesne takibinin hızla evrilmesine ve gerçek dünya sistemlerine entegre edilmesinin kolaylaşmasına yardımcı olmuştur.
Bu makalede, sekiz popüler açık kaynaklı nesne takibi aracını ve algoritmasını keşfedeceğiz. Haydi başlayalım!
Link to this sectionNesne takibi nedir?#
Bir güvenlik görevlisinin bir otoparkın CCTV görüntülerini izlediği bir senaryo düşün. Kırmızı bir arabaya göz kulak olmaya karar veriyor. Video oynarken, zihninde o arabayı etiketliyor ve başka arabalar yanından geçse veya insanlar önünde yürüse bile, gittiği her yerde onu takip etmeye devam ediyor.
Yapay zeka destekli nesne takibi de buna benzer ancak otomatik olarak ve ölçekli bir şekilde çalışır. Başka bir deyişle nesne takibi, bir nesne videonun kareleri arasında hareket ederken onu izleme ve kimliğini bir kareden diğerine tutarlı tutma sürecidir.
Birçok sistemde bu süreç, her karedeki insan, araç veya yol tabelası gibi nesneleri bulan ve etiketleyen nesne tespiti ile başlar. Ardından, bu nesneler hareket ettikçe, göründükçe, kayboldukça veya çakıştıkça, takip sistemi tespitleri kareler arasında birbirine bağlar; böylece hangi nesnenin hangisi olduğunu ve zaman içinde her birinin nereye gittiğini bilir.

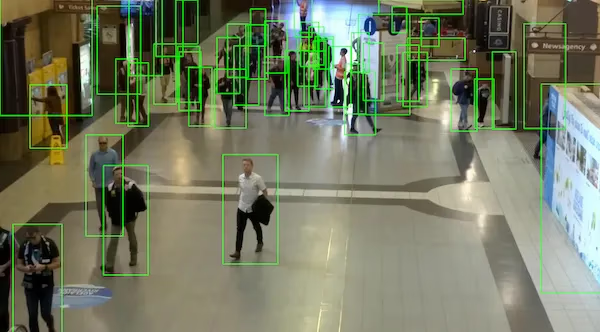
Şekil 1. Nesne takibine bir bakış (Kaynak)
İki yaygın takip türü vardır: tek bir ana nesneye (spor videosunda sadece topu takip etmek gibi) odaklanan tek nesne takibi (SOT) ve birçok nesneyi aynı anda takip edip her birine benzersiz bir kimlik atayan (yoğun bir kavşaktaki tüm arabaları takip etmek gibi) çoklu nesne takibi (MOT).
Takip türü ne olursa olsun, çoğu sistem üç temel bileşene dayanır: her karedeki nesneleri bulmak için bir dedektör, bu nesnelerin nasıl hareket edeceğini tahmin etmek için bir hareket modeli ve yeni tespitleri daha önce takip edilen nesnelerle bağlamak için bir eşleştirme adımı. Bu parçalar, ham videoyu nesnelerin zaman içinde nasıl hareket ettiği ve etkileşime girdiği hakkında anlamlı bilgilere dönüştürür.
Link to this sectionAçık kaynaklı nesne takibi araçlarına duyulan ihtiyaç#
Detaylara girmeden önce şunu merak ediyor olabilirsin: açık kaynaklı nesne takibi araçlarını ve algoritmalarını bu kadar özel kılan nedir?
Açık kaynaklı araçlar, nesne takibinin kullanımını kolaylaştırmada ve daha geniş kitlelere ulaştırmada büyük bir rol oynamıştır. Kod açık olduğu için, geliştiriciler ve araştırmacılar bir takipçinin tam olarak nasıl çalıştığını görebilir, ondan bir şeyler öğrenebilir ve onu kara kutu gibi davranmak yerine kendi projelerine uyarlayabilirler.
Ayrıca güçlü topluluklardan da yararlanırlar. Birçok açık kaynaklı takip aracı, yeni özellikler ekleyen, hızı ve doğruluğu artıran, hataları düzelten ve araçları en son araştırmalarla uyumlu tutan aktif katılımcılar tarafından sürdürülmektedir. Bu sürekli iş birliği, farklı uygulamalarda güvenilir ve yararlı kalmalarına yardımcı olur.
Maliyet, önemli olmalarının bir diğer büyük nedenidir. Açık kaynaklı araçlar ücretsiz olduğundan, öğrenciler, startup'lar ve küçük ekipler lisans ücretleri veya abonelik maliyetleri hakkında endişelenmeden deneyler yapabilir, prototipler geliştirebilir ve gerçek sistemler kurabilirler.
Link to this sectionEn iyi 8 açık kaynak nesne izleme aracı ve algoritması#
Günümüzde takip sistemleri kurmak için çok çeşitli açık kaynaklı seçenek mevcuttur. Bazıları doğrudan hattına ekleyebileceğin takip algoritmaları veya modelleridir; bazıları ise bu modelleri çalıştırmayı, yönetmeyi ve entegre etmeyi kolaylaştıran kütüphaneler ve çerçevelerdir. Birlikte, temel takip mantığından gerçek bir projede ihtiyaç duyduğun çevre araçlara kadar her şeyi kapsarlar.
Şimdi, sekiz popüler açık kaynaklı nesne takibi aracına ve algoritmasına bir göz atalım.
Link to this sectionUltralytics YOLO modelleri ve Ultralytics Python paketi#
Nesne takibi için en kolay ve en pratik seçeneklerden biri, Ultralytics YOLO modellerini, Ultralytics Python paketi ile birlikte kullanmaktır. Ultralytics YOLO11 ve yakında çıkacak olan Ultralytics YOLO26 gibi Ultralytics YOLO modelleri; nesne tespiti, örnek segmentasyonu, poz tahmini ve nesne takibi dahil olmak üzere bir dizi görü görevini destekleyen bilgisayarlı görü modelleridir.

Şekil 2. YOLO11 kullanarak nesneleri tespit etme ve takip etme örneği. (Kaynak)
İlginç bir şekilde, modellerin kendileri kareler arasında nesneleri takip etmez. Bunun yerine, Ultralytics YOLO modellerini çalıştırmayı ve dağıtmayı basitleştiren bir kütüphane olan Ultralytics Python paketi, YOLO'nun kareden kareye tespitlerini BoT-SORT ve ByteTrack gibi özel çoklu nesne takibi algoritmalarıyla birleştirerek takibi mümkün kılar.
Yerleşik takip özelliğiyle, Ultralytics paketi ve Ultralytics YOLO modelleri, her karedeki nesneleri tespit etmek ve ardından hareket ettiklerinde, çakıştıklarında, kareden ayrıldıklarında ve daha sonra tekrar girdiklerinde takip edilebilmeleri için tutarlı kimlikler atamak amacıyla kullanılabilir. Bu yaklaşım, imalat ve perakende gibi sektörlerde giderek daha fazla benimsenmekte; kusur denetim iş akışları, envanter akışı takibi ve mağaza içi müşteri takibi gibi uygulamaları mümkün kılmaktadır.
Link to this sectionOpenCV takipçileri#
OpenCV, bir nesne takibi algoritması koleksiyonu içeren geniş bir bilgisayarlı görü kütüphanesidir. Bu kütüphane, 1999'dan beri OpenCV topluluğu tarafından geliştirilmekte ve sürdürülmektedir.
Derin öğrenmeye güvenmek yerine, bu takipçilerin çoğu korelasyon filtreleri ve çekirdek tabanlı teknikler gibi geleneksel bilgisayarlı görü yöntemlerini kullanır (bunlar, sinir ağlarını kullanarak özellikleri öğrenmek yerine, bir nesneyi bir kareden diğerine görsel görünümünü, yani renk ve dokusunu eşleştirerek takip eder).
Bu algoritmaları kullanırken, genellikle önce takip etmek istediğin nesneyi seçebilirsin ve takipçi, nesne hareket ettikçe sonraki karelerde en benzer görsel bölgeyi sürekli olarak arar.
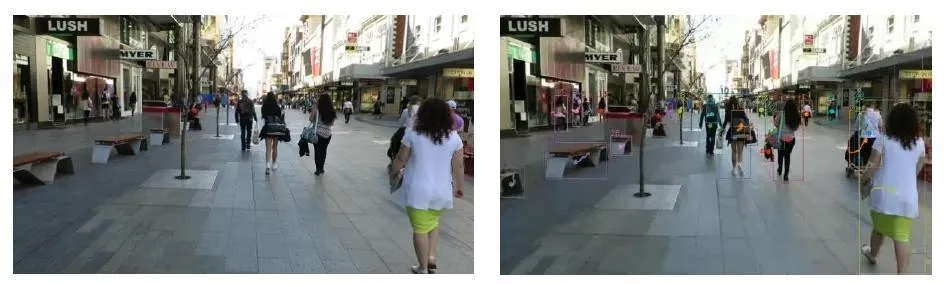
Şekil 3. OpenCV kullanarak nesne takibi (Kaynak)
Bu yöntemler karmaşık veya kalabalık sahnelerde modern derin öğrenme tabanlı takip sistemleri kadar sağlam olmayabilse de, hafif, hızlı ve çalıştırması kolay oldukları için hala yaygın olarak kullanılmaktadır. Ayrıca, bu takipçiler CPU'larda verimli bir şekilde çalıştığından ve genellikle bir GPU gerektirmediğinden, hızlı deneyler, sınıf içi öğrenim ve hobi projeleri için iyi çalışırlar.
Link to this sectionByteTrack#
ByteTrack, çoklu nesne takibi için en popüler açık kaynaklı algoritmalardan biridir. Modelin çok emin olduğu tespitleri eşleştirmek yerine, birçok sistemin normalde göz ardı ettiği düşük güvenli tespitlerden de yararlanır.
Bu, kısmen engellendiklerinde, uzakta olduklarında veya hızlı hareket ettiklerinde olduğu gibi kısa süreliğine görülmesi zor olan nesneleri takip etmesine yardımcı olur. Hızlı ve güvenilir olduğundan, ByteTrack gerçek zamanlı performansın ve tutarlı kimliklerin önemli olduğu trafik analizi, yaya takibi ve perakende izleme gibi uygulamalarda yaygın olarak kullanılır.
Daha önce belirtildiği gibi, tespit için Ultralytics YOLO modellerini kullanıyorsan, Ultralytics Python paketi aracılığıyla ByteTrack'i etkinleştirmek kolaydır. Ancak aynı zamanda özel hatlarda bağımsız olarak da kullanılabilir, bu da onu araştırma prototiplerinden C++ ile yazılmış üretim sistemlerine kadar her şeye uygun hale getirir.
Link to this sectionDeepSORT#
Çoklu nesne takibi için yaygın olarak kullanılan bir diğer algoritma, Deep Simple Online and Real-Time Tracking'in kısaltması olan DeepSORT'tur. Bu, Simple Online and Real-Time Tracking'in kısaltması olan SORT'un gelişmiş bir sürümüdür.
ByteTrack'e benzer şekilde, SORT da tespit tabanlı takip yaklaşımını izler. Ancak SORT, bir nesnenin gelecekteki konumunu geçmiş hareketine dayanarak tahmin etmek için bir Kalman filtresi (matematiksel bir model) kullanır ve her nesnenin bir sonraki hamlesinin nereye olabileceğini öngörür.
Ardından, yeni tespitleri mevcut izlerle, esas olarak konuma ve sınırlayıcı kutu çakışmasına göre eşleştirir. Bu, SORT'u hızlı ve hafif kılar ancak nesneler çakıştığında, yolları kesiştiğinde veya kısa süreliğine görünmez olduğunda zorlanabilir.
DeepSORT, takip sürecine görünüm bilgisini ekleyerek SORT'u geliştirir. Hareket ve konuma ek olarak, nesnelerin nasıl göründüğünü öğrenen derin öğrenme tabanlı bir yeniden tanımlama veya re-id modeli kullanır. Bu, takipçinin hareketin onu diğerlerinden ayırt etmek için yeterli olmadığı durumlarda bile aynı nesneyi kareler arasında tanımasını sağlar.
Bu nedenle DeepSORT, insanların sıklıkla çakıştığı veya kısa süreliğine tıkandığı gözetim ve kalabalık izleme gibi uygulamalarda yaygın olarak kullanılır. Ancak bugün klasik bir temel olarak kabul edilir ve daha yeni takip yöntemleri genellikle daha zorlu sahnelerde daha iyi performans elde eder.
Link to this sectionNorfair#
Norfair, seni sabit bir takip hattına zorlamak yerine esnek olacak şekilde tasarlanmış hafif bir takip kütüphanesidir. Dedektör çıktıları, sınırlayıcı kutu merkezleri, anahtar noktalar veya özel koordinat verileri gibi bir dizi nokta olarak temsil edilebildiği sürece, neredeyse her dedektörün üzerine takip ekleyebilir.
Şekil 4. Norfair kullanarak gerçek dünya nesne takibi (Kaynak)
Bu esneklik, standart çoklu nesne takibi araçlarının yetersiz kalabileceği olağandışı girdiler veya dinamik hareket kalıpları içeren projeler için onu özellikle etkili kılar. Kütüphane ayrıca, tespitlerin kareler arasında nasıl eşleştirileceğini kontrol etmek için yerleşik mesafe fonksiyonları sağlar.
Bu mesafe fonksiyonları iki nokta veya nesnenin ne kadar benzer olduğunu ölçer ve kullanıcılara takip mantığı üzerinde tam kontrol sağlar. Norfair genellikle robotik, spor hareket analizi, drone navigasyonu ve poz işaretlerini veya anahtar noktaları takip etmeye büyük ölçüde dayanan uygulamalarda kullanılır.
Link to this sectionMMTracking#
MMTracking, MMDetection gibi yaygın olarak kullanılan bilgisayarlı görü kütüphanelerinin arkasındaki ekip olan OpenMMLab ekibinden açık kaynaklı bir takip araç kutusudur. MMDetection üzerine inşa edilmiş olup, takip sistemleri geliştirmek ve denemek için esnek bir çerçeve sağlar.
En büyük güçlerinden biri modüler tasarımıdır. Sizi tek bir hatla sınırlamak yerine MMTracking; dedektörler, takip modülleri ve bazı kurulumlarda yeniden tanımlama modelleri gibi farklı bileşenleri yapılandırmana ve değiştirine olanak tanır. Bu esneklik nedeniyle, ekiplerin yöntemleri karşılaştırmak, yeni fikirleri test etmek veya takip hatlarında ince ayar yapmak istedikleri araştırma ve ileri düzey projelerde özellikle popülerdir.
Link to this sectionFairMOT#
FairMOT, aynı anda birçok nesneyi takip etmek için tasarlanmış bir çoklu nesne takibi çerçevesidir. Önce tespiti çalıştıran ve ardından nesneleri ayrı bir adım olarak kareler arasında bağlayan geleneksel tespit tabanlı takip hatlarının aksine, FairMOT tespit ve yeniden tanımlamayı tek bir ağda birlikte öğrenir.
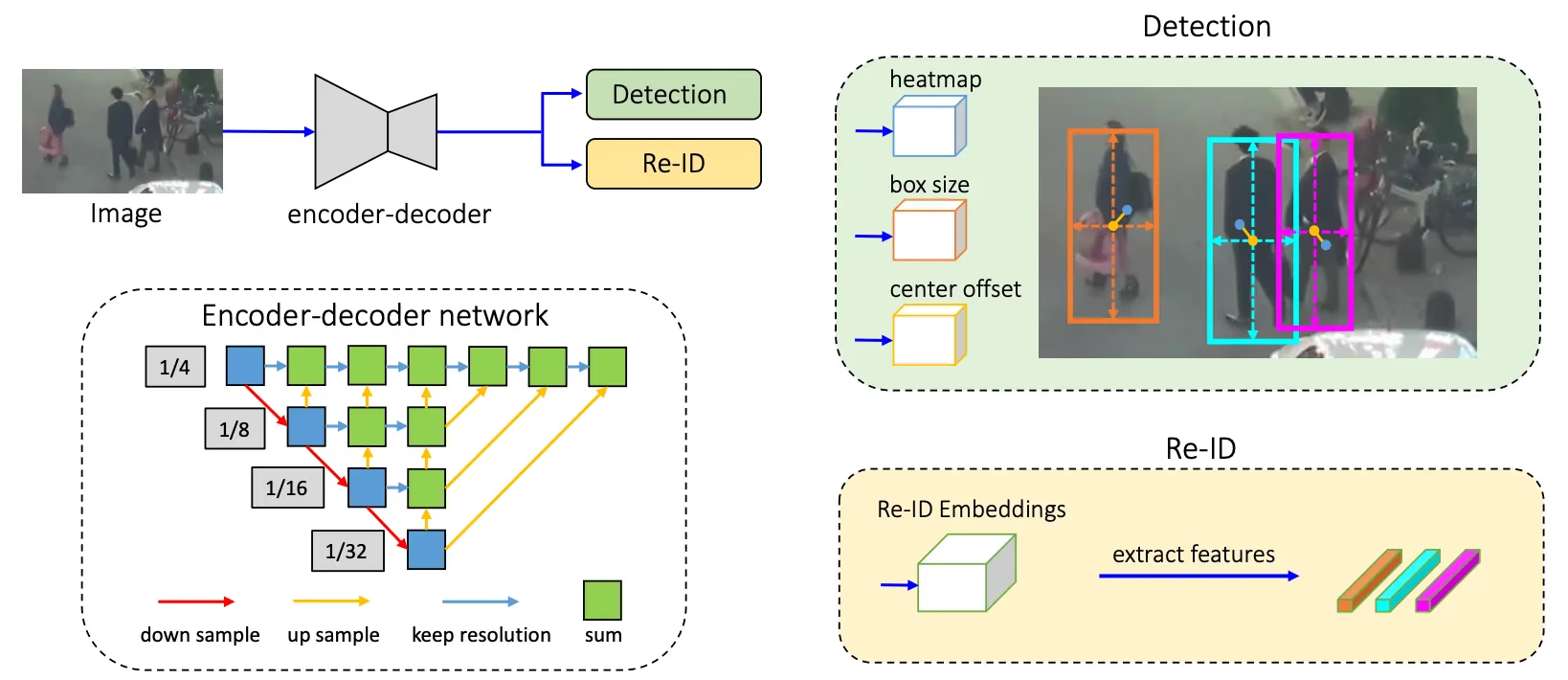
Şekil 5. FairMOT çerçevesinin nasıl çalıştığı (Kaynak)
Bu ortak kurulum, özellikle insanların sıklıkla çakıştığı veya hızlı hareket ettiği kalabalık sahnelerde daha tutarlı kimlikler tutmasına yardımcı olur. FairMOT, yaya takibi ve kalabalık izleme gibi senaryolarda yaygın olarak kullanılır; ayrıca gerçek zamanlı olarak birçok hedefi takip etmenin önemli olduğu perakende analitiği ve trafik izleme gibi ortamlarda da uygulanır.
Link to this sectionSiamMask#
SiamMask, bir sınırlayıcı kutu ile birlikte bir segmentasyon maskesi üreterek birçok takipçiden bir adım öteye giden tek bir nesne takibi yöntemidir. Basitçe ifade etmek gerekirse, hedefin etrafına sadece bir dikdörtgen çizmez. Hedef şekil değiştirdiğinde, döndüğünde veya kısmen gizlendiğinde yardımcı olabilecek şekilde nesnenin şeklini piksel düzeyinde ana hatlarıyla belirtir.

Şekil 6. SiamMask kullanarak nesne takibi ve segmentasyonu (Kaynak)
Bu yaklaşım, takipçinin önce ilk kareden hedefin küçük bir referans görüntüsünü (genellikle şablon olarak adlandırılır) aldığı bir Siamese takip tasarımı kullanır. Ardından, her yeni karede daha geniş bir bölgeyi arar ve o şablonla en yüksek benzerliğe sahip noktayı bulur.
SiamMask bu eşleştirme tabanlı fikir üzerine inşa edilmiştir. Ayrıca hedef için piksel düzeyinde bir maske tahmin eder, böylece video oynarken hem nesnenin konumu hem de daha hassas bir ana hat elde edersin.
Link to this sectionBir nesne takibi aracı seçerken temel faktörler#
Günümüzde yapay zeka alanında mevcut olan çeşitli açık kaynaklı nesne takibi aracı seçenekleriyle, bilgisayarlı görü projen için en iyi seçenek, özel kullanım durumunun gerektirdiklerine bağlıdır. İşte dikkate alman gereken bazı faktörler:
- Doğruluk: Bu, görme sisteminin çakışma, tıkanma veya hızlı hareket sırasında bile kararlı kimlikleri koruması gereken kalabalık veya görsel olarak karmaşık sahnelerde en önemlisidir.
- Hız: Robotik, trafik izleme ve spor analitiği gibi gerçek zamanlı uygulamalar için yanıt verebilirlik, kusursuz hassasiyetten daha önemli olabilir.
- Entegrasyon kolaylığı: Bazı nesne takibi araçlarının tak-çalıştır özelliği kolaydır ve sadece birkaç satır kodla çalışır, bazıları ise daha fazla kurulum, yapılandırma veya özel hat çalışması gerektirir.
- Dağıtım kısıtlamaları: GPU sunucuları, uç cihazlar veya mobil donanım gibi hedef ortam, hangi takip yaklaşımının pratik olduğunu belirleyebilir.
- Ölçeklenebilirlik: Sistemin aynı anda birçok nesneyi takip etmesi veya birden fazla video akışını işlemesi gerekiyorsa, takipçi performansta büyük bir düşüş olmadan verimli bir şekilde ölçeklenmelidir.
Her nesne takibi aracının veya algoritmasının farklı bir amacı vardır. Nihayetinde, doğru seçim; özel gereksinimlerine, çalışma zamanı kısıtlamalarına, performans ölçümlerine ve projenin ne kadar özelleştirilebilir bir takip yaklaşımı gerektirdiğine bağlıdır.
Link to this sectionÖne çıkanlar#
Nesne takibi, erken dönem el yapımı tekniklerden günümüzün hareketi, kimliği ve davranışı etkileyici bir doğrulukla yorumlayan son teknoloji derin öğrenme sistemlerine evrilmiştir. Açık kaynaklı araçlar bu ilerlemenin itici gücü olmuştur. Güçlü algoritmalara erişimi demokratikleştirir, denemeleri teşvik eder ve araştırmacıların kısıtlayıcı lisanslama veya ağır altyapı olmadan sofistike takip hatları kurmalarını sağlar.
Yapay zeka hakkında daha fazla bilgi edinmek için topluluğumuza ve GitHub depomuza göz at. Tarımda yapay zeka ve imalatta bilgisayarlı görü üzerine çözüm sayfalarımızı keşfet. Lisanslama seçeneklerimizi keşfet ve kendi görü modelini oluşturmaya başla.






