Gece trafiğinde video algılama: Doğruluğun neden önemli olduğuna bir bakış
Düşük görüş mesafesinden parlama etkisine kadar, gece trafiği video algılama doğruluğunu neyin zorlaştırdığını ve bilgisayarlı görü'nün güvenliği ve akışı nasıl iyileştirdiğini öğren.

Yollar karanlıkta sadece sürücüler için değil, onları güvende tutmaktan sorumlu sistemler için de farklı görünür. Düşük görüş mesafesi, far parlaması ve hızla hareket eden yansımalar gece araç tespitini daha zorlu hale getirebilir.
Manuel gözlem veya hareket tabanlı kameralar gibi geleneksel yöntemler, esas olarak insan yargısına ve basit hareket ipuçlarına dayanır. Bu durum düşük ışıklı veya karmaşık trafik koşullarında güvenilmez olabilir. Bu yöntemler araçları veya yayaları yanlış tanımlayabilir, bu da hatalı tespitlere veya gözden kaçan durumlara yol açabilir.

Şekil 1. Gece vakti kötü aydınlatılmış bir yola örnek (Kaynak)
Yapay zeka (AI), derin öğrenme ve computer vision, araç tespiti ve tanımayı otomatikleştirerek aradaki boşluğu kapatabilir. Özellikle computer vision, makinelerin görsel verileri görmesini ve yorumlamasını sağlayan bir AI dalıdır. Gece trafik video tespiti söz konusu olduğunda, vision AI modelleri parlaklık veya hareketin ötesine geçerek doğruluğu artıran karmaşık desenleri tanımayı öğrenebilir.
Örneğin, Ultralytics YOLO26 ve Ultralytics YOLO11 gibi computer vision modelleri hızları ve hassasiyetleriyle bilinirler. Video ve görüntü verilerini gerçek zamanlı olarak işleyebilir, bir kare içindeki birden fazla nesneyi tespit edip sınıflandırabilir ve onları sekanslar boyunca takip edebilirler.
Bu yetenekler, farlar, gölgeler veya üst üste binen araçlar tespiti zorlaştırdığında bile nesne tespiti ve örnek segmentasyonu gibi çeşitli vision görevleriyle mümkün kılınır. Modelin nesneleri tanımlamasını, sınıflandırmasını ve ayırt etmesini sağlarlar.
Bu makalede, gece trafik izlemenin zorluklarını keşfedecek, computer vision'ın bunları nasıl ele aldığını görecek ve vision AI'ın gerçek dünya trafik izleme sistemlerinde nerede uygulandığına bakacağız. Hadi başlayalım!
Link to this sectionGece tespitindeki zorluklar#
Computer vision'ın gece trafik tespitinin zorluklarını nasıl çözdüğünü incelemeden önce, araçları karanlıkta tespit etmenin neden bu kadar zor olduğuna bakalım. Dikkate alınması gereken birkaç faktör şunlardır:
-
Düşük görüş mesafesi: Sınırlı ışık ve kötü aydınlatma koşulları, kameraların keskin ve ayrıntılı görüntüler yakalamasını zorlaştırır. Düşük görüntü kalitesiyle araçlar arka planla karışabilir veya tamamen yanlış tanımlanabilir.
-
Hava koşulları: Yağmur, sis, pus ve hatta toz video kalitesini daha da bozabilir. Bu koşullar, tespit sistemlerinin araçları çevrelerinden ayırmasını zorlaştırır.
-
Farlar ve arka lambalar: Parlak ışık huzmeleri ve yansımalar kameraların kapasitesini aşabilir. Bu, ışık noktalarının araç sanılmasına yol açarak hatalı araç tespitleri oluşturabilir, tespit algoritmalarını karıştırıp doğruluğu azaltabilir.
-
Araçların örtülmesi: Yoğun trafik koşullarında araçlar, diğerlerinin arkasında kısmen veya tamamen gizlenebilir. Örtülme (oklüzyon), özellikle birden fazla yol kullanıcısı tek bir kare içinde üst üste bindiğinde araç takibini, sayımını ve sınıflandırmasını zorlaştırır.
Link to this sectionGece benchmark veri setlerine ve metriklere duyulan ihtiyaç#
Computer vision modelleri, veri setleri olarak bilinen büyük görüntü koleksiyonları kullanılarak eğitilir. Bu veri setleri, arabalar, kamyonlar, yayalar ve bisikletler gibi içerdikleri nesnelerle dikkatlice etiketlenir ve eğitimin temelini oluşturur. Bu etiketli örnekleri inceleyerek model, yeni video görüntülerinde nesneleri tanımlamasını ve tespit etmesini sağlayan desenleri tanımayı öğrenir.

Şekil 2. Trafikte araçları ve yayaları tespit etmek için computer vision kullanımı (Kaynak)
Eğitim sırasında model, verilerden özellikleri çıkarır ve bunları tespit doğruluğunu artırmak için kullanır. Bu süreç, model gerçek dünya trafik sahnelerine maruz kaldığında gözden kaçan tespitleri ve hatalı alarmları azaltmaya yardımcı olur.
Ancak gece koşulları için datasets veya veri koleksiyonları oluşturmak çok daha zordur. Düşük video kalitesi, etiketlemeyi zaman alıcı ve hatalara açık hale getirir. Ayrıca, kazalar veya olağandışı sürüş davranışı gibi nadir ama önemli olayları gece ortamlarında yakalamak zor olabilir. Bu durum, modellerin öğrenebileceği eğitim örneği sayısının sınırlı kalmasına neden olur.
Bu sorunu çözmek için araştırmacılar özel benchmark veri setleri geliştirdiler. Bir benchmark veri seti, sadece bir görüntü koleksiyonundan fazlasıdır. Standart etiketler, değerlendirme protokolleri ve hassasiyet, duyarlılık ve mean average precision (mAP) gibi performans metriklerini içerir. Bu metrikler, farklı algoritmaları aynı koşullar altında test edip karşılaştırmayı mümkün kılarak adil ve tutarlı bir değerlendirme sağlar.
Örneğin, ExDark benchmark veri seti, 12 nesne kategorisinde (bisiklet, tekne, şişe, otobüs, araba, kedi, sandalye, fincan, köpek, motosiklet, insanlar, masa) 7.363 düşük ışıklı görüntü içerir. Her görüntü sınırlayıcı kutularla (bounding boxes) açıklanmıştır ve veri seti, zayıf aydınlatmada nesne tespiti ve sınıflandırmayı değerlendirmek için araştırmalarda yaygın olarak kullanılmaktadır.
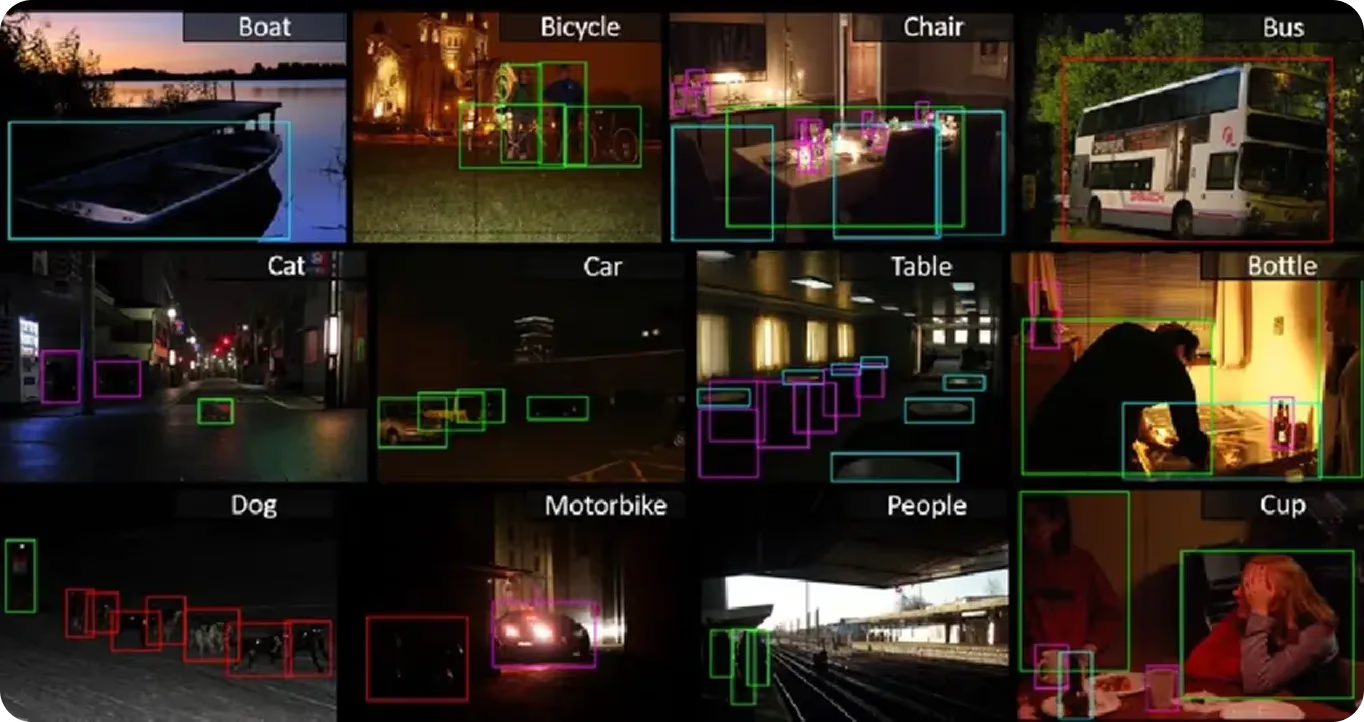
Şekil 3. ExDark veri setine bir bakış (Kaynak)
Benzer şekilde, NightOwls benchmark veri seti, yaklaşık 279.000 yaya açıklaması içeren yaklaşık 115.000 gece görüntüsü sağlar. Yol güvenliği ve gelişmiş sürücü destek sistemlerinde (ADAS) hayati bir rol oynayan yaya tespit sistemlerini değerlendirmek için önemli bir kaynak haline gelmiştir.
Link to this sectionComputer vision gece trafik video tespitine nasıl yardımcı olur#
Artık zorluklar ve veri setlerine duyulan ihtiyaç hakkında daha iyi bir anlayışa sahip olduğumuza göre, vision tabanlı sistemlerin gece trafik videolarını nasıl yorumlayabileceğine daha yakından bakalım.
YOLO11 ve YOLO26 gibi modeller, trafik durumunu düşük ışık koşullarında bile analiz etmeyi mümkün kılan nesne tespiti, takip ve örnek segmentasyonu gibi computer vision tasks destekler. İşte bu modellerin gece trafiğini analiz etmek için desteklediği vision AI görevlerine genel bir bakış:
- Object detection: Bu görev, genellikle etraflarına sınırlayıcı kutular çizerek her karedeki araçları, yayaları, bisikletleri ve diğer yol kullanıcılarını tanımlamak ve yerlerini belirlemek için kullanılabilir.
- Object tracking: Tespit edilen nesnelerin kareler boyunca takip edilmesine yardımcı olur, böylece aynı aracın veya yayanın zaman içinde tanınması sağlanır; bu da araç hızını tahmin etmeyi ve trafik akışını izlemeyi mümkün kılar.
- Instance segmentation: Üst üste geldiklerinde bile bireysel nesneleri ayırt edebilir ve karmaşık gece koşullarında doğruluğu artıran piksel düzeyinde ayrıntı sağlar.
- Image classification: Bu görev, tüm bir görüntüyü veya tespit edilen bir nesneyi araba, otobüs, kamyon veya motosiklet gibi önceden tanımlanmış bir kategoriye atar.
- Oriented bounding box (OBB) detection: Bir nesnenin tam açısını ve yönünü yakalar, araçlar gece trafiğinde çapraz veya tuhaf konumlarda göründüğünde doğruluğu artırır.
Link to this sectionGece izleme için Ultralytics YOLO modellerini kullanmak#
Model eğitimini, veri setlerine olan ihtiyacı ve YOLO11 ile YOLO26 gibi modellerin desteklediği görevleri tartıştık. Ancak hepsini bir araya getirmek için üzerinden geçilmesi gereken bir kavram daha var: bu modellerin gece izlemede gerçekte nasıl uygulandığı.
Ultralytics YOLO modelleri kutudan çıktığı gibi önceden eğitilmiş versiyonlar olarak gelir, yani birçok gündelik nesneyi kapsayan COCO dataset gibi büyük, genel amaçlı veri setleri üzerinde zaten eğitilmişlerdir. Bu, modele nesneleri tespit etmek ve sınıflandırmak için güçlü bir temel yetenek kazandırır.
Ancak, bu veri setleri çok az düşük ışıklı veya gece örneği içerdiğinden, önceden eğitilmiş modeller parlama, gölgeler veya zayıf kontrast ile etkili bir şekilde başa çıkmakta iyi değildir. Gece trafik video tespiti için etkili olmaları adına, gerçek dünya gece koşullarını yansıtan özel veri setleri üzerinde ince ayar (fine-tuning) yapılmaları gerekir.
İnce ayar veya custom training, modelin far parlaması altındaki araçlar, yaya geçitlerindeki yayalar veya gece kalabalık kavşaklar gibi düşük ışıklı koşullarda yakalanmış ek etiketli görüntüler üzerinde eğitilmesini içerir, böylece gece sahnelerinin benzersiz özelliklerini öğrenir.
Özel olarak eğitildikten sonra model, düşük ışıklı koşullarda tespit, takip, segmentasyon veya sınıflandırma gibi görevleri çok daha yüksek doğrulukla destekleyebilir. Bu, trafik yetkililerinin bu modelleri gece araç sayımı, hız tahmini, uyarlanabilir sinyal kontrolü ve kaza önleme gibi pratik kullanım durumları için uygulamasına olanak tanır.
Link to this sectionGece trafik video tespiti için vision AI uygulamaları#
Sırada, computer vision'ın gerçek dünya gece trafik sistemlerinde nasıl benimsenebileceğine bakalım.
Link to this sectionAkıllı trafik sinyalleri, akıllı şehir planlamasını destekleyebilir#
Kentsel kavşaklar, özellikle görüşün düştüğü ve trafik akışının daha az tahmin edilebilir hale geldiği geceleri yönetilmesi en zor alanlardan bazılarıdır. Geleneksel sinyaller, gerçek zamanlı değişikliklere yanıt veremeyen sabit zamanlayıcılara dayanır. Araştırmalar, bunun sadece sürücüler için zaman kaybına yol açmadığını, aynı zamanda gereksiz fuel consumption and delays neden olduğunu göstermektedir.
Computer vision sistemlerinin bu zorluğun üstesinden gelmeye yardımcı olabileceği yer tam olarak burasıdır. Bu sistemler araç hareketlerini izleyebilir ve araç sayısını gerçek zamanlı olarak tespit edebilir. Veriler daha sonra uyarlanabilir trafik kontrol sistemlerine aktarılır. Bu, sinyallerin gerçek yol koşullarına yanıt olarak hızla ayarlanmasını sağlar. Dolayısıyla, bir şerit kalabalıkken diğeri boşsa, sinyal süresi tıkanıklıkları gidermek için anında ayarlanabilir.
Link to this sectionKaza önleme#
Gece araba kullanmak gündüze göre daha risklidir çünkü görüşün azalması, düzensiz aydınlatma ve parlama sürücülerin mesafeleri tahmin etmesini zorlaştırır. Aslında araştırmalar, gece kilometre başına fatal accident rate oranının gün ışığına göre üç kat daha yüksek olabileceğini göstermektedir.
Sabit güvenlik kameraları, yol devriyeleri, araç varlık sensörleri ve sabit zamanlı sinyal sistemleri gibi geleneksel izleme yöntemleri reaktif olarak çalışır ve tehlikeli durumları oluşmadan önce önleyecek kadar erken tespit edemeyebilir.
Computer vision solutions, canlı video akışlarını analiz ederek ve yoldaki veya otoyoldaki olağandışı desenleri tespit ederek bu endişeyi giderebilir. Nesne takibini kullanarak, bu sistemler araç davranışını gerçek zamanlı olarak izleyebilir ve bir şeyler anormal göründüğünde uyarı verebilir.
Örneğin, hareket halindeki bir araç şerit değiştiriyorsa, sıkışık bir alanda çok hızlı hareket ediyorsa veya aniden yavaşlıyorsa, sistem bunu gerçek zamanlı olarak işaretleyebilir. Bu, yetkililerin hızlı bir şekilde yanıt verebileceği ve kazaları gerçekleşmeden önce önleyebileceği anlamına gelir.
Link to this sectionOtonom sürüş ve ADAS#
Otonom araçlar ve ADAS için gece sürüşü kendi zorluklarını beraberinde getirir. Düşük görüş mesafesi ve tahmin edilemeyen trafik desenleri, geleneksel sensörlerin güvenilir bir şekilde performans göstermesini zorlaştırır, bu da güvenlik endişelerini artırır.
Computer vision, nesne tespiti, şerit takibi ve segmentasyon gibi görevleri yerine getirerek bu sistemleri geliştirir ve araçların zayıf aydınlatma koşullarında bile yayaları, diğer arabaları ve engelleri tanımasını sağlar. Çevreyi 3D olarak haritalayan radar veya LiDAR (Işık Algılama ve Uzaklık Belirleme) ile birleştirildiğinde, eklenen görsel katman ADAS'ın erken uyarılar sağlamasına ve otonom araçların geceleri daha güvenli bir şekilde ilerlemek için ihtiyaç duydukları farkındalığa sahip olmasına yardımcı olur.

Şekil 4. Hem gündüz hem de gece koşullarında yakalanan araç görüntüleri (Kaynak)
Link to this sectionKolluk kuvvetleri ve ihlal tespiti#
Speeding, dünya çapında her üç trafik ölümünden birinden sorumludur ve risk sadece gece daha da kötüleşir. Karanlık, trafik polisinin ihlalleri yakalamasını zorlaştırır, çünkü gün ışığında net olan ayrıntılar genellikle karardıktan sonra bulanıklaşır.
Bu yüzden boş yollarda hız yapma, kırmızı ışıkta geçme veya yanlış şeride girme gibi suçlar genellikle cezasız kalır. Computer vision, kızılötesi kameralar kullanarak düşük ışıklı koşullarda bile ihlalleri tespit ederek bu sorunu ele alır. Bu sistemler, olayların kaydedildiği tespit bölgeleri oluşturarak yanlış pozitifleri azaltır ve net, doğrulanabilir kanıtlar sağlar. Ulaştırma yetkilileri için bu, daha az kör nokta ve manuel kontrollere daha az bağımlılık anlamına gelir.
Link to this sectionGece trafik video tespitinin artıları ve eksileri#
İşte gece trafik video tespiti için vision AI kullanmanın bazı avantajları.
- Ölçeklenebilirlik: İnce ayar yapıldıktan sonra modeller birçok kamera veya kavşakta dağıtılabilir ve şehir genelinde izlemeyi destekleyebilir.
- Tahminleme analitiği: Geçmiş video verileri, tıkanıklık ve kaza eğilimli bölgeleri tahmin etmek için kullanılabilir, önleyici tedbirleri destekler.
- Kaynak optimizasyonu: Yetkililere yol devriyelerini ve acil durum hizmetlerini daha verimli bir şekilde tahsis etmeye yardımcı olan gerçek zamanlı içgörüler sağlar.
Faydalarına rağmen, vision AI kullanarak gece trafik tespiti bazı sınırlamalarla da gelir. Akılda tutulması gereken bazı faktörler şunlardır:
-
Veri bağımlılığı: Vision AI sistemlerinin doğruluğu, çok çeşitli gece koşullarını yakalayan büyük, high-quality datasets erişimine büyük ölçüde bağlıdır.
-
Çevresel zorluklar: Yağmur, sis veya pus gibi hava faktörlerinin yanı sıra kirli veya yanlış hizalanmış kamera lensleri gibi pratik sorunlar tespit performansını düşürebilir ve düzenli bakım gerektirebilir.
-
Donanım gereksinimleri: Gelişmiş AI modellerini çalıştırmak genellikle yüksek performanslı GPU'lar veya özel uç cihazlar gerektirir, bu da büyük ölçekli kurulumu maliyetli ve karmaşık hale getirebilir.
Link to this sectionGece akıllı ulaşım sistemleri için önümüzdeki yol#
Şehirler büyüdükçe ve yollar yoğunlaştıkça, gece trafik tespiti daha akıllı ve duyarlı sistemlere doğru ilerliyor. Örneğin, termal kameralar ve kızılötesi sensörler, insanlardan ve araçlardan gelen ısı imzalarını tespit edebilir, bu da tam karanlıkta bile görmeyi mümkün kılar. Bu, standart kameraların parlama veya düşük ışıkla mücadele ederken oluşan hataları azaltır.

Şekil 5. Gece görüş teknolojisi, gece yaya tespitini iyileştirir (Kaynak)
Bir diğer büyüyen yaklaşım ise camera-LiDAR fusion yöntemidir. Kameralar yolun ayrıntılı görüntülerini sağlarken, LiDAR hassas bir 3D harita oluşturur. Birlikte kullanıldıklarında, özellikle düşük ışıkta veya orta şiddetli siste şeritlerin, araçların ve engellerin tespit edilme doğruluğunu artırırlar.
Aynı zamanda, düşük ışıklı görüntü iyileştirme, yaya tanıma ve plaka tanımlamadaki gelişmeler, computer vision'ın yeteneklerini genişletiyor. Bu iyileştirmelerle, kötü aydınlatılmış yollar ve kavşaklar bile daha fazla güvenilirlik ve daha az hata ile izlenebiliyor.
Link to this sectionÖne çıkanlar#
Araçları geceleri tespit etmek trafik izleme için her zaman bir zorluk olmuştur, ancak computer vision bunu daha yönetilebilir hale getiriyor. Parlamanın etkisini azaltarak ve karmaşık trafik sahnelerini işleyerek, yolların karanlıktan sonra nasıl davrandığına dair daha doğru bir resim sunuyor. Bu sistemler gelişmeye devam ettikçe, geceleri daha güvenli, daha akıllı ve daha verimli ulaşımın yolunu açıyorlar.
Vision AI'ı projelerinize entegre etmeye hazır mısınız? Aktif community topluluğumuza katılın ve AI in the automotive endüstrisi ve vision AI in robotics gibi yenilikleri keşfedin. Daha fazlasını öğrenmek için GitHub repository depomuzu ziyaret edin. Computer vision'a bugün başlamak için licensing options seçeneklerimize göz atın.






