3D nesne algılamayı ve uygulamalarını anlamak
2D ve 3D nesne algılamanın nasıl çalıştığını, temel farklarını ve otonom araçlar, robotik ve artırılmış gerçeklik gibi alanlardaki uygulamalarını keşfet.

Yıllar geçtikçe, nesne algılama giderek daha gelişmiş bir hale geldi. Basit iki boyutlu (2D) görüntülerdeki nesneleri tanımaktan, etrafımızdaki karmaşık üç boyutlu (3D) dünyadaki nesneleri tanımlamaya doğru ilerledi. Görüntünün bölümlerini depolanmış referans görüntülerle karşılaştırarak nesneleri bulmayı içeren şablon eşleştirme gibi erken teknikler 1970'lerde geliştirildi ve 2D nesne algılamanın temelini oluşturdu. 1990'larda, LIDAR (Işık Algılama ve Mesafe Ölçme) gibi teknolojilerin tanıtılması, sistemlerin derinlik ve uzamsal bilgileri daha kolay yakalamasını mümkün kıldı. Günümüzde, 2D görüntüleri 3D verilerle birleştiren çok modlu füzyon yöntemleri, son derece hassas 3D nesne algılama sistemlerinin yolunu açtı.
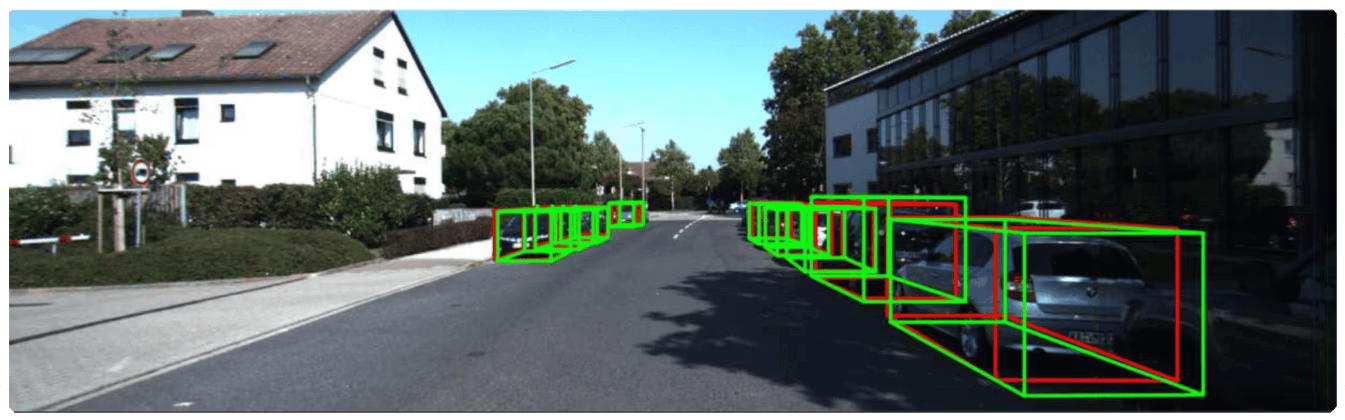
Şekil 1. Bir 3D nesne algılama örneği.
Bu makalede 3D nesne algılamanın ne olduğunu, nasıl çalıştığını ve 2D nesne algılamadan nasıl farklı olduğunu inceleyeceğiz. Ayrıca 3D nesne algılamanın bazı uygulama alanlarını tartışacağız. Hadi başlayalım!
Link to this section2D nesne algılamaya genel bakış#
3D nesne algılamaya göz atmadan önce, 2D nesne algılamanın nasıl çalıştığını anlayalım. 2D nesne algılama, bilgisayarların düz, iki boyutlu görüntülerdeki nesneleri tanımasını ve bulmasını sağlayan bir bilgisayarlı görü tekniğidir. Bir nesnenin resimdeki yatay (X) ve dikey (Y) konumunu analiz ederek çalışır. Örneğin, futbol sahasındaki oyuncuların olduğu bir görüntüyü Ultralytics YOLOv8 gibi bir 2D nesne algılama modeline verirsen, bu model görüntüyü analiz edebilir ve her bir nesnenin (bu durumda oyuncuların) etrafına sınırlayıcı kutular çizebilir, böylece konumlarını hassas bir şekilde tanımlayabilir.
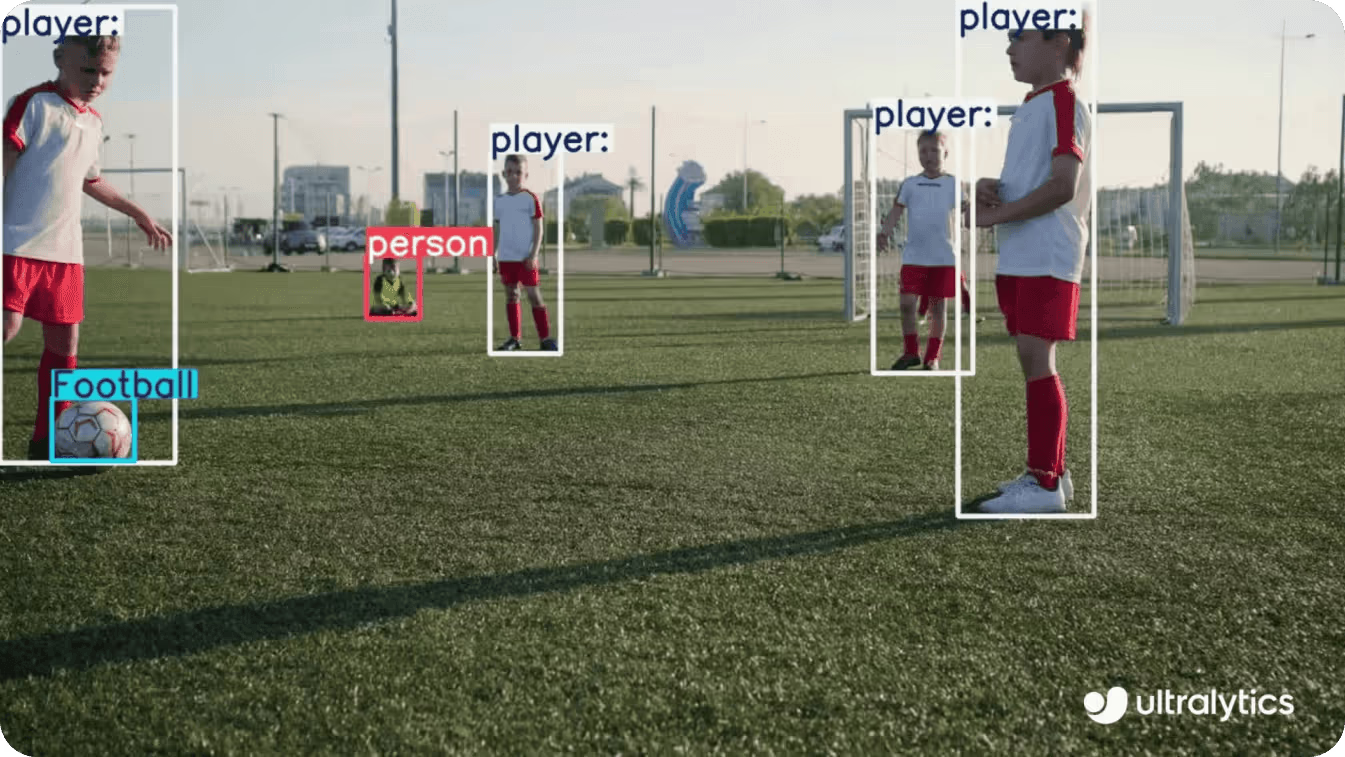
Şekil 2. Futbol sahasındaki oyuncuları algılamak için kullanılan YOLOv8 2D nesne algılama.
Ancak 2D nesne algılamanın sınırlamaları vardır. Sadece iki boyutu dikkate aldığı için derinliği anlayamaz. Bu durum, bir nesnenin ne kadar uzakta olduğunu veya boyutunun ne olduğunu yargılamayı zorlaştırabilir. Örneğin, uzaktaki büyük bir nesne, daha yakındaki küçük bir nesneyle aynı boyutta görünebilir, bu da kafa karıştırıcı olabilir. Derinlik bilgisinin eksikliği, robotik veya artırılmış gerçeklik gibi nesnelerin gerçek boyutunu ve mesafesini bilmenin gerekli olduğu uygulamalarda hatalara yol açabilir. İşte 3D nesne algılama ihtiyacı burada devreye giriyor.
Link to this section3D nesne algılama ile uzamsal farkındalık kazanmak#
3D nesne algılama, bilgisayarların üç boyutlu bir alandaki nesneleri tanımlamasını sağlayan ve onlara etraflarındaki dünyaya dair çok daha derin bir anlayış kazandıran gelişmiş bir bilgisayarlı görü tekniğidir. 2D nesne algılamanın aksine, 3D nesne algılama derinlik verilerini de hesaba katar. Derinlik bilgisi; bir nesnenin nerede olduğu, ne kadar büyük olduğu, ne kadar uzakta olduğu ve gerçek 3D dünyada nasıl konumlandığı gibi daha fazla detay sağlar. İlginç bir şekilde, 3D algılama, bir nesnenin diğerini kısmen gizlediği durumları (tıkanıklıklar) daha iyi yönetebilir ve perspektif değiştiğinde bile güvenilir kalır. Hassas uzamsal farkındalık gerektiren kullanım durumları için güçlü bir araçtır.
3D nesne algılama, kendi kendine giden arabalar, robotik ve artırılmış gerçeklik sistemleri gibi uygulamalar için hayati öneme sahiptir. LiDAR veya stereo kameralar gibi sensörler kullanarak çalışır. Bu sensörler, nokta bulutları veya derinlik haritaları olarak bilinen, ortamın ayrıntılı 3D haritalarını oluşturur. Daha sonra bu haritalar, 3D ortamdaki nesneleri algılamak için analiz edilir.
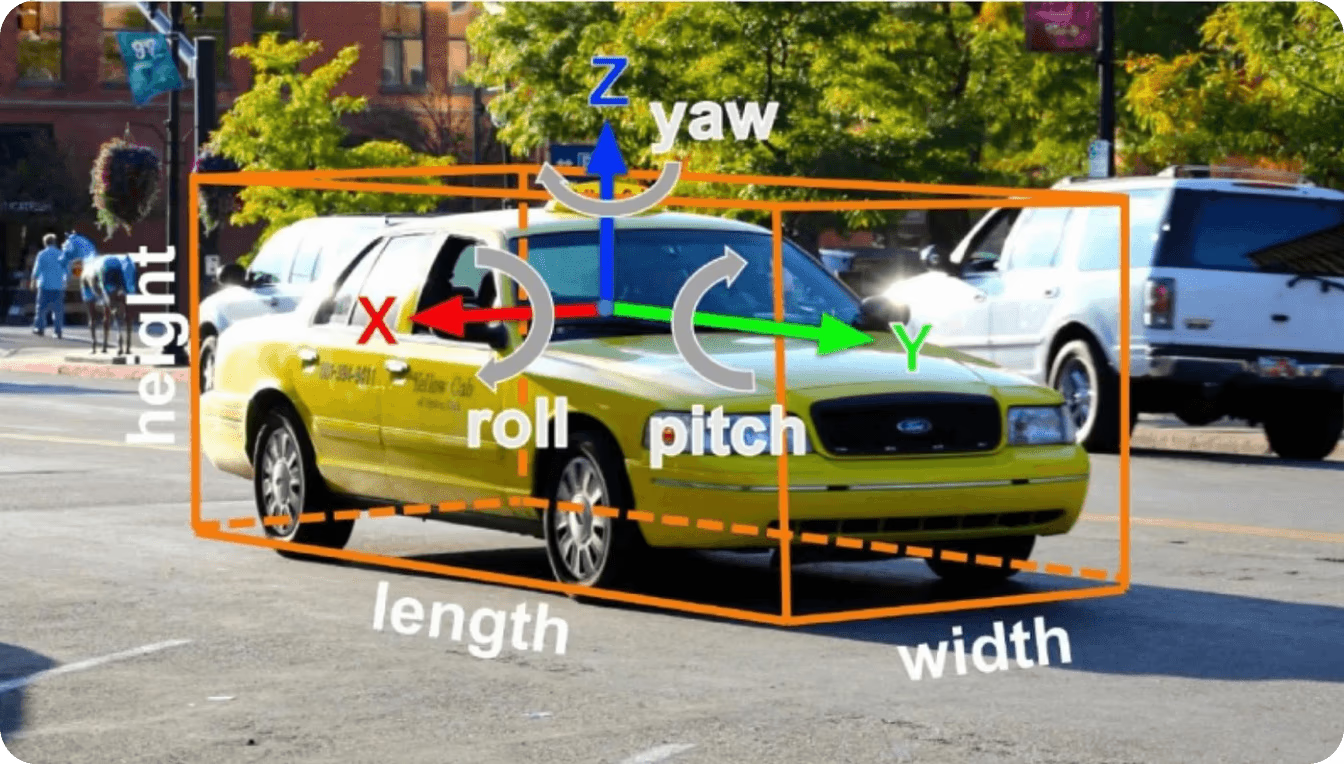
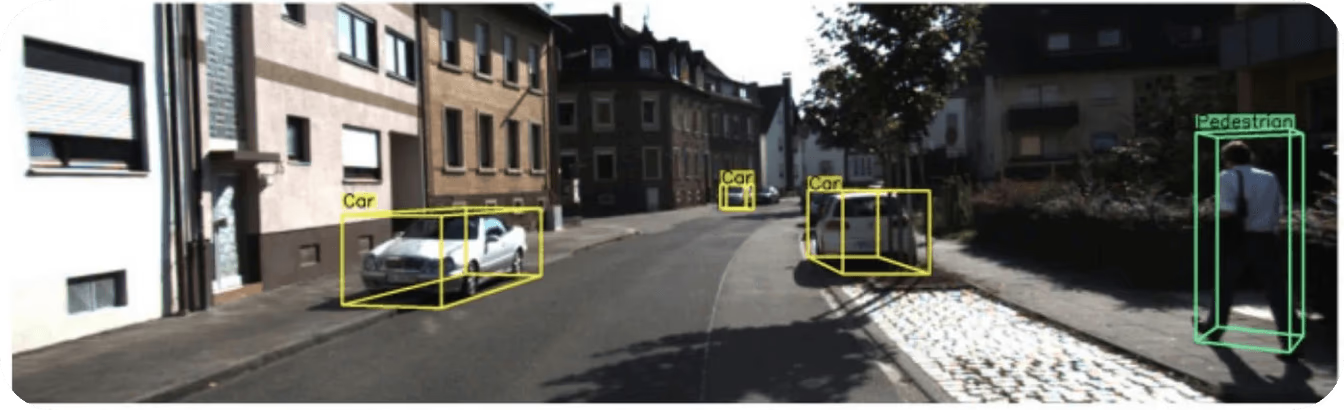
Şekil 3. Bir arabanın 3D nesne algılaması.
Nokta bulutları gibi 3D verileri işlemek için özel olarak tasarlanmış birçok gelişmiş bilgisayarlı görü modeli vardır. Örneğin, VoteNet, bir nokta bulutunda nesnenin merkezinin nerede olduğunu tahmin etmek için Hough oylaması adlı bir yöntem kullanan bir modeldir; bu da nesneleri doğru bir şekilde algılamayı ve sınıflandırmayı kolaylaştırır. Benzer şekilde, VoxelNet, veri analizini basitleştirmek için nokta bulutlarını voksel adı verilen küçük küplerden oluşan bir ızgaraya dönüştüren bir modeldir.
Link to this section2D ve 3D nesne algılama arasındaki temel farklar#
Artık 2D ve 3D nesne algılamayı anladığımıza göre, temel farklarını keşfedelim. 3D nesne algılama, nokta bulutlarıyla çalıştığı için 2D nesne algılamadan daha karmaşıktır. LiDAR tarafından oluşturulan nokta bulutları gibi 3D verileri analiz etmek, çok daha fazla bellek ve işlem gücü gerektirir. Bir diğer fark ise dahil olan algoritmaların karmaşıklığıdır. 3D nesne algılama modelleri, derinlik kestirimi, 3D şekil analizi ve bir nesnenin yöneliminin analizini yapabilmek için daha karmaşık olmalıdır.
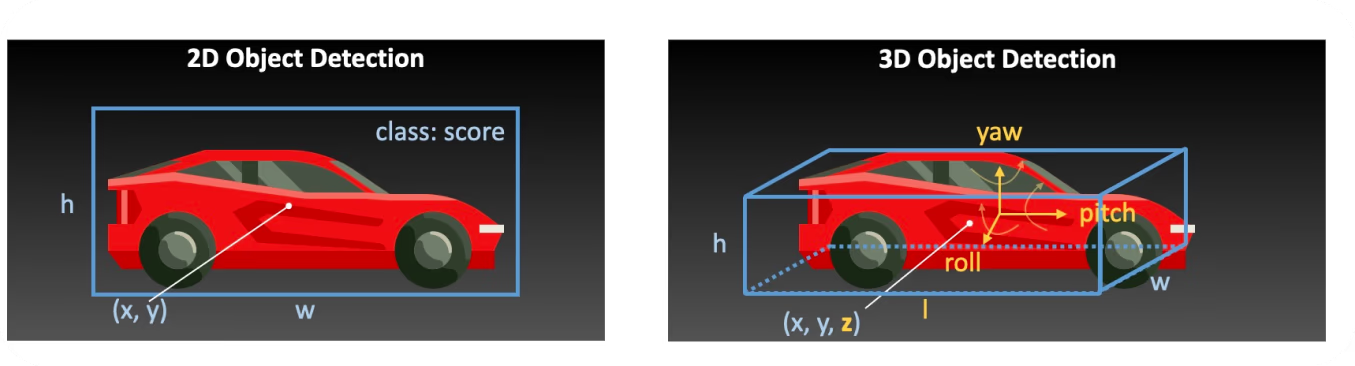
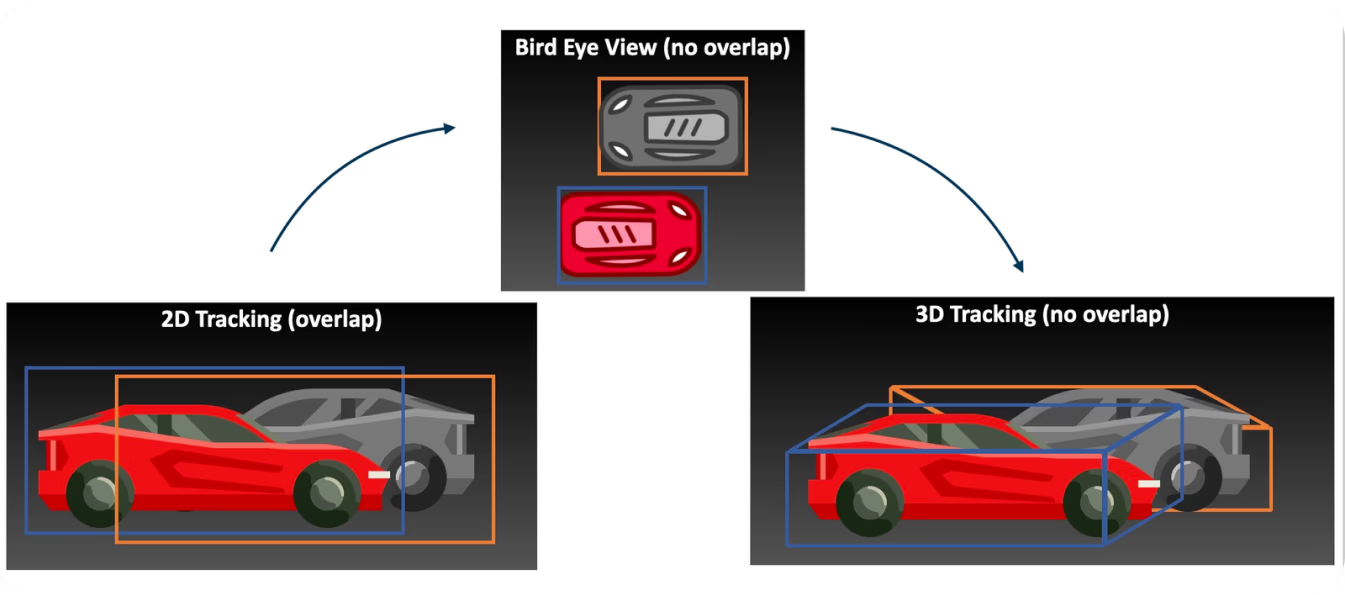
Şekil 4. 2D ve 3D Nesne Algılama karşılaştırması.
3D object detection models involve heavier mathematical and computational work than 2D object detection models. Processing 3D data in real-time can be challenging without advanced hardware and optimizations. However, these differences make 3D object detection more suited for applications requiring better spatial understanding. On the other hand, 2D object detection is often used for simpler applications like security systems that need image recognition or video analysis.
Link to this section3D nesne algılamanın artıları ve eksileri#
3D nesne algılama, onu geleneksel 2D nesne algılama yöntemlerinden ayıran çeşitli avantajlar sunar. Bir nesnenin üç boyutunu da yakalayarak, gerçek dünyaya göre konumu, boyutu ve yönelimi hakkında kesin detaylar sağlar. Bu tür bir hassasiyet, engellerin tam yerini bilmenin güvenlik için hayati önem taşıdığı kendi kendine giden arabalar gibi uygulamalar için çok önemlidir. 3D nesne algılamayı kullanmanın bir diğer avantajı da, farklı nesnelerin 3D uzayda birbirleriyle nasıl ilişkili olduğuna dair çok daha iyi bir anlayış kazanmana yardımcı olabilmesidir.
Şekil 5. 3D Nesne Algılama ile Tıkanıklıkların Çözülmesi.
Birçok faydasına rağmen, 3D nesne algılama ile ilgili sınırlamalar da vardır. Akılda tutulması gereken bazı temel zorluklar şunlardır:
- Daha yüksek hesaplama maliyetleri: 3D verilerle çalışmak daha güçlü donanım kaynakları gerektirir ve maliyet hızla artabilir.
- Daha karmaşık veri gereksinimleri: 3D nesne algılama genellikle pahalı olabilen ve her ortamda bulunmayabilen LiDAR gibi gelişmiş sensörlere güvenir.
- Veri toplama ve işleme: 3D nesne algılamanın karmaşık veri gereksinimleri, modelleri eğitmek için gereken büyük veri setlerini toplamayı, hazırlamayı ve işlemeyi hem zaman alıcı hem de kaynak yoğun hale getirir.
- Artan model karmaşıklığı: 3D nesne algılama için kullanılan modeller genellikle 2D nesne algılama için kullanılanlardan daha fazla katmana ve parametreye sahip, daha karmaşık modellerdir.
Link to this section3D nesne algılamanın uygulamaları#
Artık 3D nesne algılamanın artılarını ve eksilerini tartıştığımıza göre, 3D nesne algılamanın bazı kullanım durumlarına daha yakından bakalım.
Link to this sectionOtonom araçlar#
Kendi kendine giden arabalarda, 3D nesne algılama, arabanın çevresini algılamak için hayati öneme sahiptir. Araçların yayaları, diğer arabaları ve engelleri algılamasını sağlar. Ayrıca gerçek dünyadaki konumları, boyutları ve yönelimleri hakkında kesin bilgi sağlar. 3D nesne algılama sistemleri aracılığıyla elde edilen ayrıntılı veriler, araçtaki yolcular için çok daha güvenli bir sürüş deneyimine yardımcı olur.
Şekil 6. Otonom Araçlarda 3D Nesne Algılama Kullanımı. (kaynak: towardsdatascience.com)
Link to this sectionRobotik#
Robotik sistemler 3D nesne algılamayı çeşitli uygulamalar için kullanır. Farklı türdeki ortamlarda gezinmek, nesneleri almak ve yerleştirmek ve çevreleriyle etkileşime girmek için kullanırlar. Bu tür kullanım durumları, robotların etkili bir şekilde işlev görebilmesi için üç boyutlu düzenleri anlaması gereken depolar veya üretim tesisleri gibi dinamik ortamlarda özellikle önemlidir.
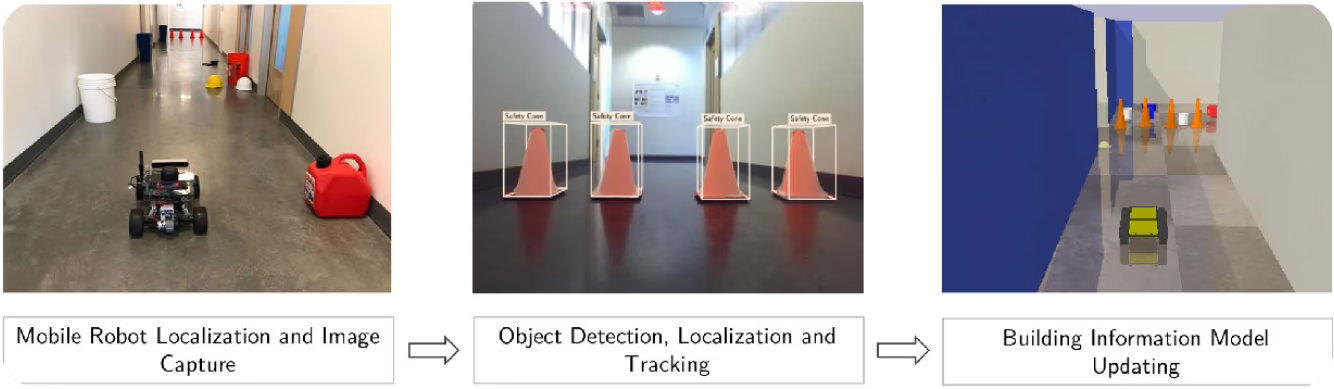
Şekil 7. 3D Nesne Algılama Kullanan Bir Mobil Robot.
Link to this sectionArtırılmış ve sanal gerçeklik (AR/VR)#
3D nesne algılamanın bir başka ilginç kullanım durumu ise artırılmış ve sanal gerçeklik uygulamalarıdır. 3D nesne algılama, sanal nesneleri gerçekçi bir VR veya AR ortamına doğru bir şekilde yerleştirmek için kullanılır. Bunu yapmak, bu tür teknolojilerin genel kullanıcı deneyimini artırır. Ayrıca VR/AR sistemlerinin fiziksel nesneleri tanımasını ve izlemesini sağlayarak, dijital ve fiziksel öğelerin sorunsuz bir şekilde etkileşime girdiği sürükleyici ortamlar oluşturur. Örneğin, AR/VR başlıklarını kullanan oyuncular, 3D nesne algılama yardımıyla çok daha sürükleyici bir deneyim yaşayabilir. Bu, 3D alanlardaki sanal nesnelerle etkileşimleri çok daha ilgi çekici hale getirir.
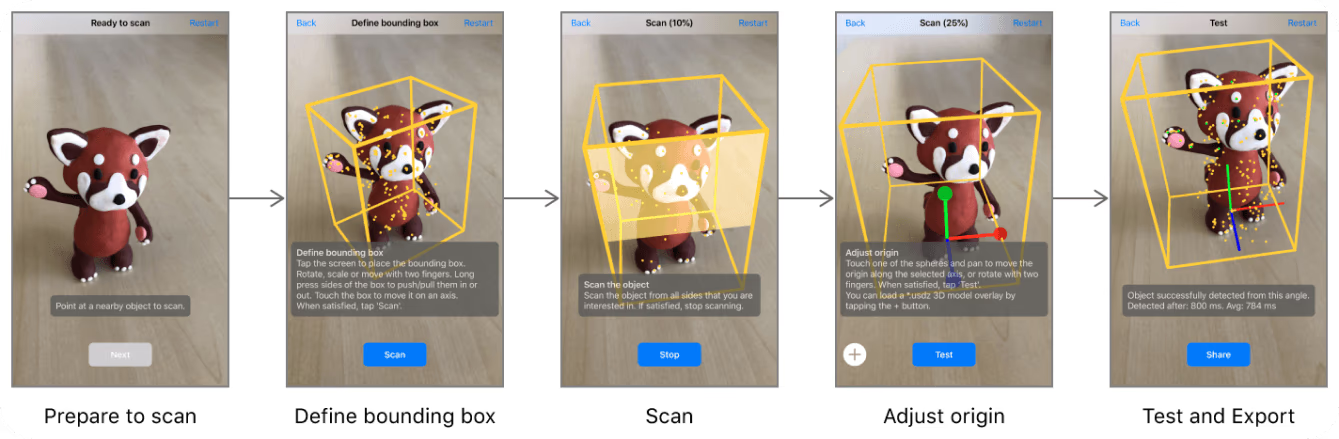
Şekil 8. Bir AR uygulaması için kullanılan 3D nesne tanıma örneği.
Link to this section3D nesne algılama üzerine son düşünceler#
3D nesne algılama, sistemlerin derinliği ve uzayı 2D nesne algılama yöntemlerinden daha etkili bir şekilde anlamasını mümkün kılar. Bir nesnenin boyutunu, mesafesini ve konumunu bilmenin önemli olduğu kendi kendine giden arabalar, robotlar ve AR/VR gibi uygulamalarda kilit bir rol oynar. 3D nesne algılama daha fazla işlem gücü ve karmaşık veri gerektirse de, doğru ve ayrıntılı bilgi sağlama yeteneği onu birçok alanda çok değerli bir araç haline getirir. Teknoloji ilerledikçe, 3D nesne algılamanın verimliliği ve erişilebilirliği muhtemelen artacak ve çeşitli endüstrilerde daha geniş bir benimseme ve inovasyonun yolunu açacaktır.
Stay connected with our community to keep up with the latest in AI! Visit our GitHub repository to see how we’re using AI to create cutting-edge solutions in industries like manufacturing and healthcare. 🚀






