了解 3D 目标检测及其应用
探索 2D 和 3D 目标检测的工作原理、主要区别及其在自动驾驶汽车、机器人和增强现实等领域的应用。

多年来,对象检测 变得越来越先进。它已经从识别简单的二维 (2D) 图像中的对象,发展到识别我们周围复杂的三维 (3D) 世界中的对象。20 世纪 70 年代开发的模板匹配等早期技术,通过将图像的一部分与存储的参考图像进行比较来查找对象,这些技术为 2D 对象检测奠定了基础。20 世纪 90 年代,激光雷达 (LIDAR) 等技术的引入使系统能够更轻松地捕获深度和空间信息。如今,结合 2D 图像和 3D 数据的 多模态融合方法 为高精度 3D 对象检测系统铺平了道路。
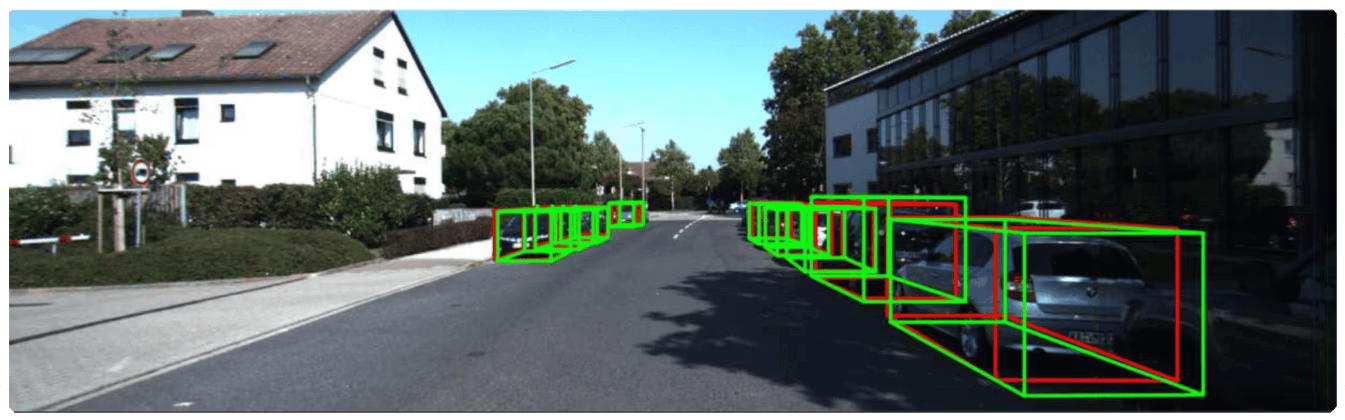
图 1。一个 3D 对象检测示例。
在本文中,我们将探讨什么是 3D 对象检测,它是如何工作的,以及它与 2D 对象检测有何不同。我们还将讨论 3D 对象检测的一些应用。让我们开始吧!
Link to this section2D 对象检测概述#
在深入了解 3D 对象检测之前,让我们先了解一下 2D 对象检测的工作原理。2D 对象检测是一种 计算机视觉技术,它使计算机能够识别并定位平面二维图像中的对象。其工作原理是分析对象在图片中的水平 (X) 和垂直 (Y) 位置。例如,如果你将一张足球场上球员的图像传给像 Ultralytics YOLOv8 这样的 2D 对象检测模型,它能够分析图像并围绕每个对象(本例中为球员)绘制边界框,从而精确地识别它们的位置。
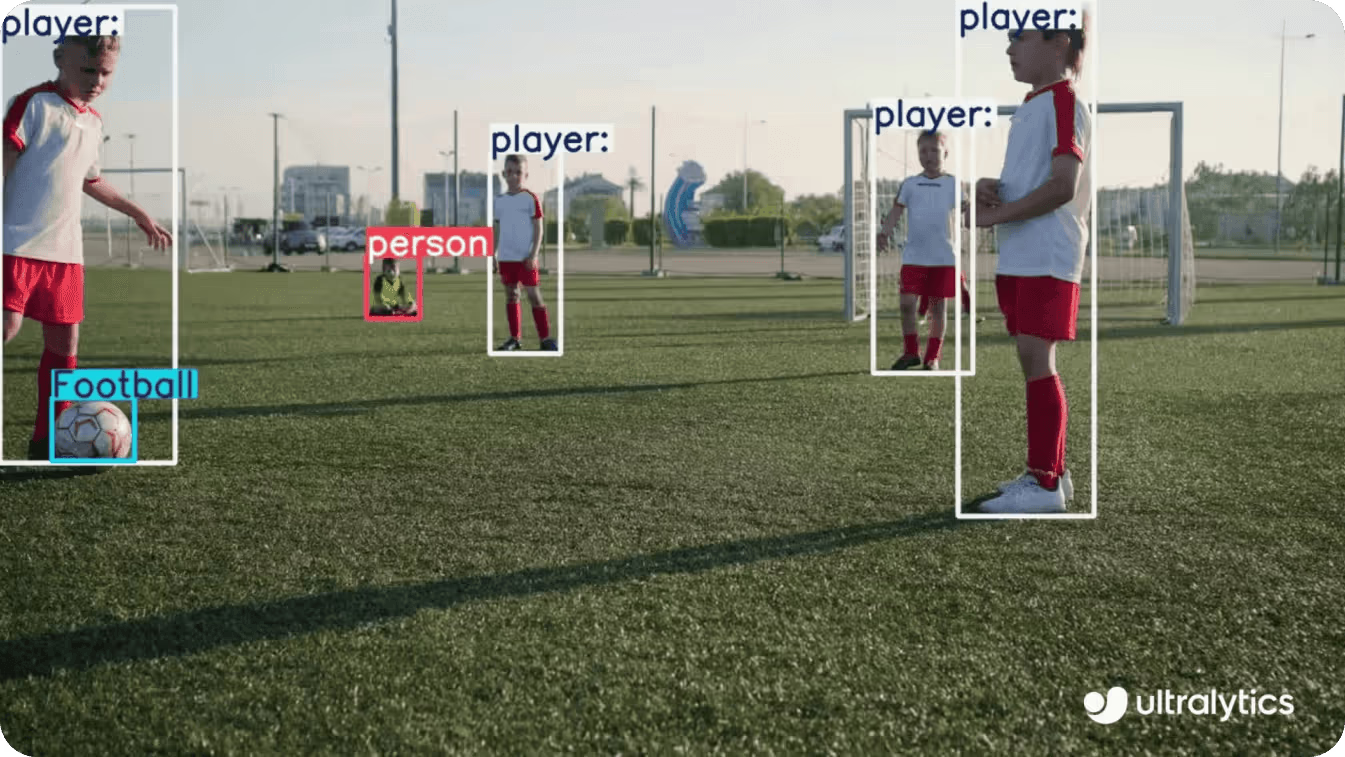
图 2。 用于检测足球场上球员的 YOLOv8 2D 对象检测。
然而,2D 对象检测有其局限性。因为它只考虑两个维度,所以它无法理解深度。这可能导致难以判断一个对象有多远或有多大。例如,一个远处的巨大对象可能看起来与一个较近的较小对象大小相同,这可能会造成混淆。缺乏深度信息会导致在 机器人技术 或 增强现实 等应用中出现不准确的情况,而在这些应用中,了解对象的真实大小和距离是必要的。这就是对 3D 对象检测的需求出现的原因。
Link to this section通过 3D 对象检测获得空间感知#
3D 对象检测 是一种先进的 计算机视觉 技术,允许计算机在三维空间中识别对象,从而使它们对周围世界有更深层的理解。与 2D 对象检测不同,3D 对象检测还考虑了深度数据。深度信息提供了更多细节,例如对象在哪里、有多大、有多远,以及它在真实 3D 世界中的位置。有趣的是,3D 检测还能更好地处理一个对象部分遮挡另一个对象(遮挡)的情况,并且即使在视角改变时也能保持可靠。它是需要精确空间感知的用例的强大工具。
3D 对象检测对于 自动驾驶汽车、机器人技术 和增强现实系统等应用至关重要。它通过使用激光雷达或立体摄像机等传感器来工作。这些传感器创建环境的详细 3D 地图,称为点云或深度图。然后对这些地图进行分析,以检测 3D 环境中的对象。
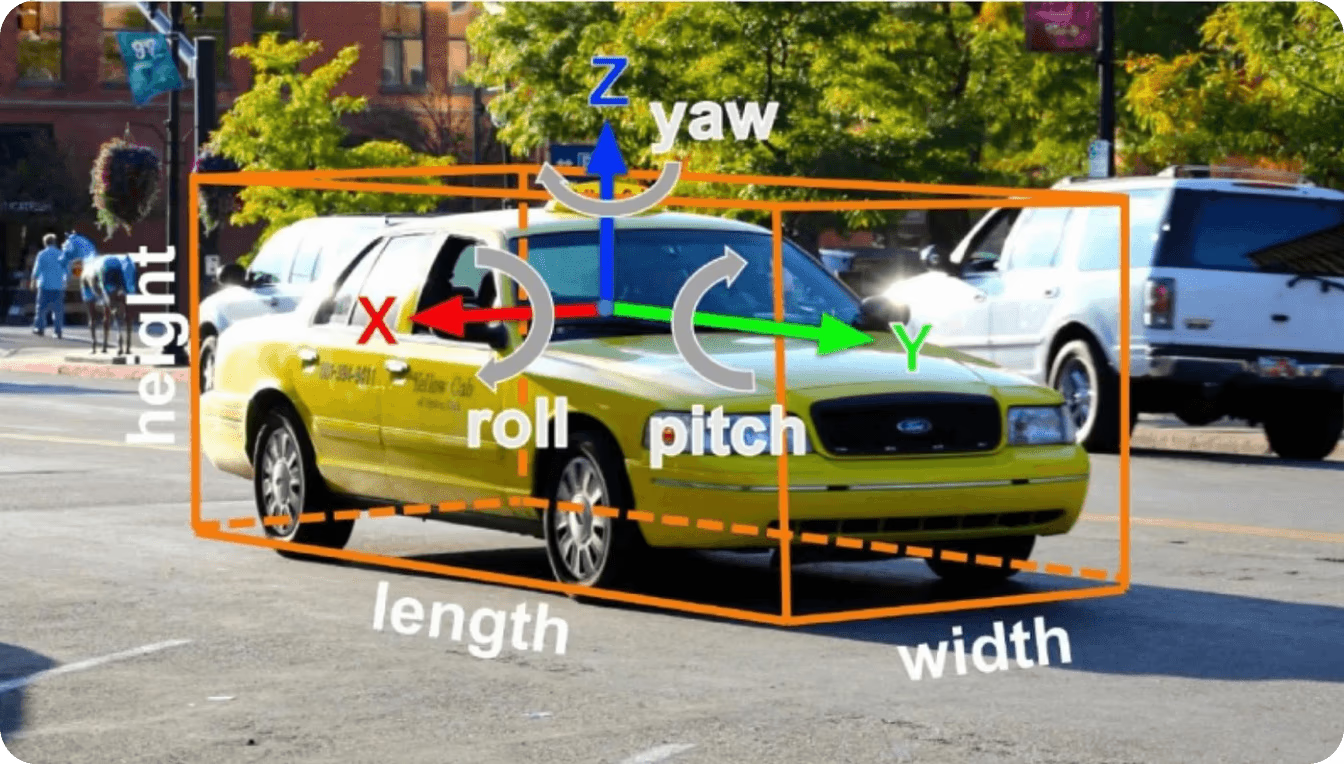
图 3。汽车的 3D 对象检测。
有许多专门为处理点云等 3D 数据而设计的先进 计算机视觉模型。例如,VoteNet 是一种使用 Hough 投票方法预测点云中对象中心位置的模型,这使得检测和 分类 对象变得更加容易和准确。同样,VoxelNet 是一种将点云转换为称为体素 (voxels) 的小立方体网格的模型,以简化数据分析。
Link to this section2D 和 3D 对象检测的主要区别#
现在我们已经了解了 2D 和 3D 对象检测,让我们探讨它们的主要区别。3D 对象检测比 2D 对象检测更复杂,因为它处理的是点云。分析 3D 数据(例如激光雷达生成的点云)需要更多的内存和计算能力。另一个区别是所涉及算法的复杂性。3D 对象检测模型需要更复杂,才能处理深度估计、3D 形状分析和对象方向分析。
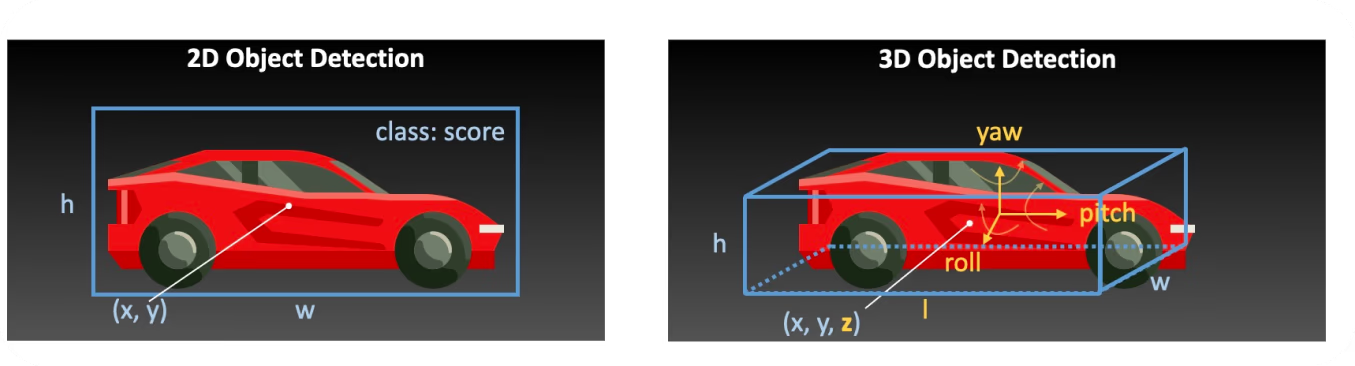
图 4。2D 与 3D 对象检测。
3D object detection models involve heavier mathematical and computational work than 2D object detection models. Processing 3D data in real-time can be challenging without advanced hardware and optimizations. However, these differences make 3D object detection more suited for applications requiring better spatial understanding. On the other hand, 2D object detection is often used for simpler applications like security systems that need image recognition or video analysis.
Link to this section3D 对象检测的优缺点#
3D 对象检测具有多项优势,使其在传统的 2D 对象检测方法中脱颖而出。通过捕获对象的所有三个维度,它提供了有关其相对于现实世界的位置、大小和方向的精确细节。这种精度对于 自动驾驶汽车 等应用至关重要,在这些应用中,了解障碍物的确切位置对于安全至关重要。使用 3D 对象检测的另一个好处是,它可以帮助你更好地了解不同对象在 3D 空间中是如何相互关联的。
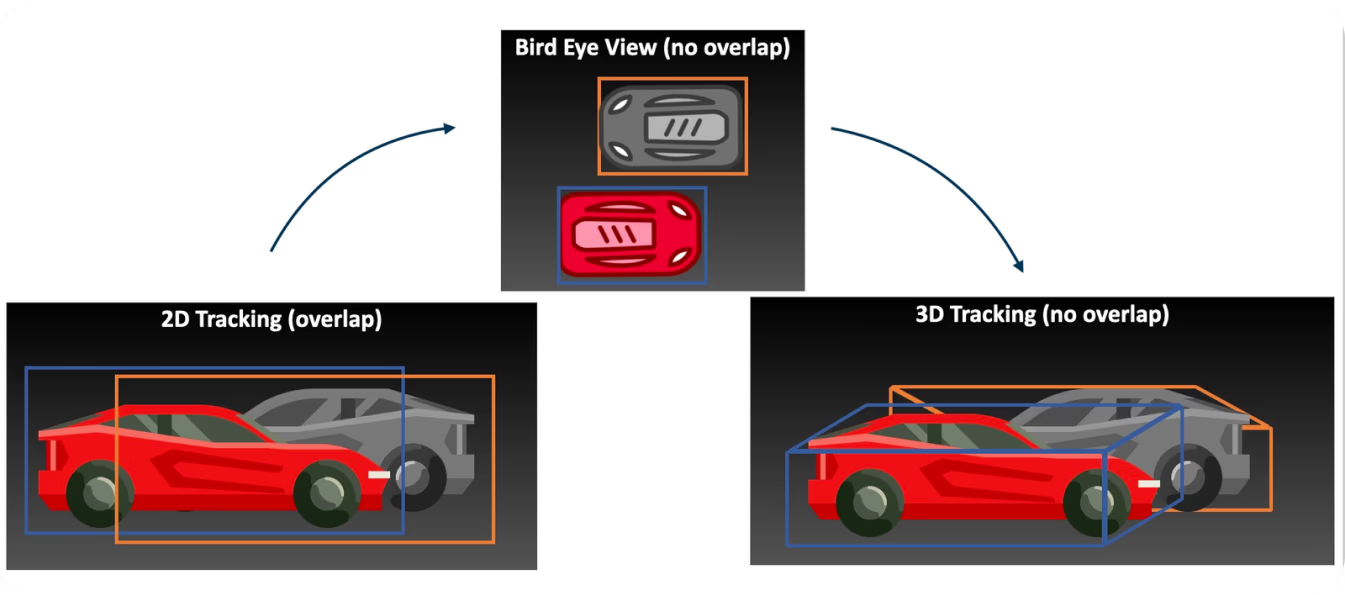
图 5。 使用 3D 对象检测解决遮挡问题。
尽管有很多好处,但 3D 对象检测也存在局限性。以下是需要记住的一些关键挑战:
- 更高的计算成本:使用 3D 数据需要更强大的硬件资源,成本会迅速增加。
- 更复杂的数据需求:3D 对象检测通常依赖于 激光雷达 等先进传感器,这些传感器可能很昂贵,且不一定在所有环境中都可用。
- 数据采集和处理:3D 对象检测的复杂数据需求使得收集、准备和处理训练模型所需的大型数据集既耗时又消耗资源。
- 模型复杂性增加:用于 3D 对象检测的模型通常更复杂,与用于 2D 对象检测的模型相比具有更多的层和参数。
Link to this section3D 对象检测的应用#
现在我们已经讨论了 3D 对象检测的优缺点,让我们仔细看看 3D 对象检测的一些用例。
Link to this section自动驾驶汽车#
在 自动驾驶汽车 中,3D 对象检测对于感知汽车周围的环境至关重要。它让车辆能够探测到行人、其他车辆和障碍物。它还提供有关它们在现实世界中的位置、大小和方向的精确信息。通过 3D 对象检测系统获得的详细数据有助于为车内乘客提供更安全的自动驾驶体验。
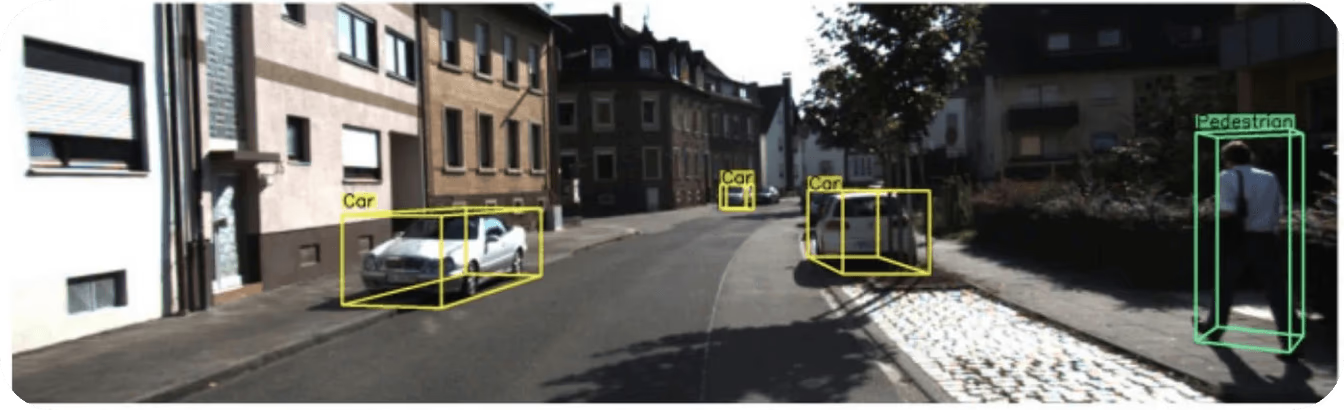
图 6。在自动驾驶汽车中使用 3D 对象检测。(来源:towardsdatascience.com)
Link to this section机器人技术#
机器人系统将 3D 对象检测用于多种应用。它们利用它在不同类型的环境中导航、拾取和放置对象,并与周围环境进行交互。这些用例在 仓库 或 制造工厂 等动态环境中尤为重要,机器人需要理解三维布局才能有效地工作。
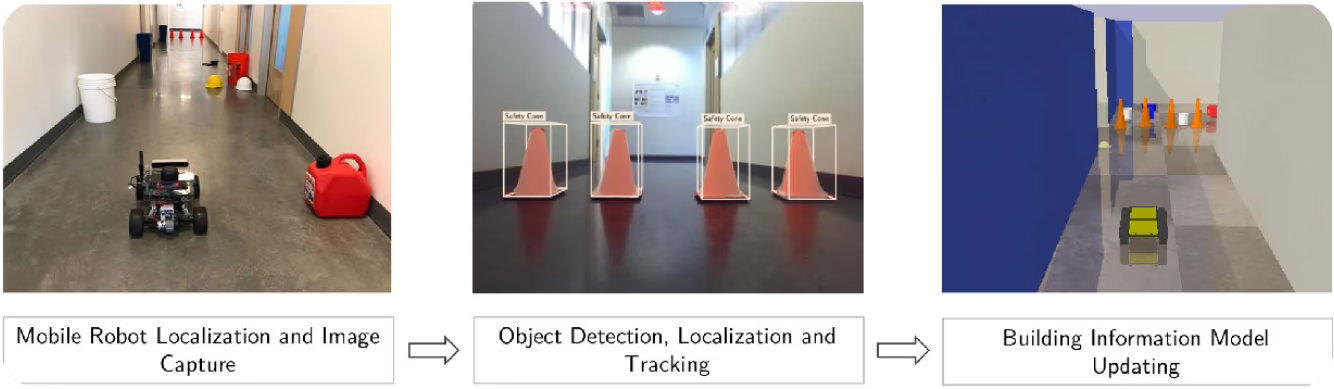
图 7。使用 3D 对象检测的移动机器人。
Link to this section增强现实和虚拟现实 (AR/VR)#
3D 对象检测的另一个有趣用例是在增强现实和虚拟现实应用中。3D 对象检测用于在逼真的 VR 或 AR 环境中精确放置虚拟对象。这样做可以提升此类技术的整体用户体验。它还允许 VR/AR 系统识别和跟踪物理对象,创造出数字元素和物理元素无缝交互的沉浸式环境。例如,使用 AR/VR 头显的 游戏玩家 在 3D 对象检测的帮助下可以获得更具沉浸感的体验。它使 3D 空间中与虚拟对象的交互变得更加引人入胜。
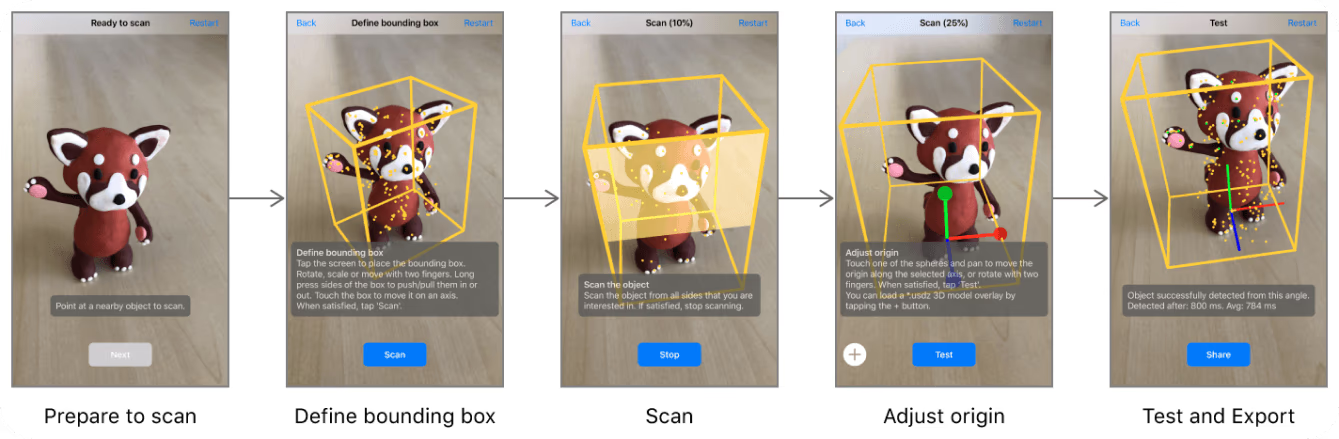
图 8。 用于 AR 应用的 3D 对象识别示例。
Link to this section关于 3D 对象检测的最后想法#
3D 对象检测使系统能够比 2D 对象检测方法更有效地理解深度和空间。它在自动驾驶汽车、机器人和 AR/VR 等应用中发挥着关键作用,在这些应用中,了解对象的大小、距离和位置非常重要。虽然 3D 对象检测需要更多的处理能力和复杂的数据,但它提供准确详细信息的能力使其成为许多领域非常有价值的工具。随着技术的进步,3D 对象检测的效率和可访问性可能会提高,从而为各行各业的更广泛应用和创新铺平道路。
加入我们的 社区 以跟上 AI 的最新动态!访问我们的 GitHub 存储库,了解我们如何利用 AI 在 制造业 和 医疗保健 等行业创造尖端解决方案。🚀






