الذكاء الاصطناعي في السيارات ذاتية القيادة
استكشف كيف تُمكّن الرؤية الحاسوبية في المركبات ذاتية القيادة من الإدراك واتخاذ القرار في الوقت الفعلي، مما يحسن السلامة وتجربة القيادة الشاملة.

لم تعد السيارات ذاتية القيادة مجرد فكرة مستقبلية؛ بل أصبحت واقعاً ملموساً مدفوعاً بالتطورات في الذكاء الاصطناعي (AI) للقيادة الذاتية. تعتمد هذه المركبات بشكل كبير على أنظمة ذكاء اصطناعي متقدمة، لا سيما رؤية الحاسوب، لفهم وتفسير العالم من حولها. تُمكّنها هذه التكنولوجيا من تحديد الأشياء، والتعرف على إشارات المرور، والتنقل بأمان عبر البيئات المعقدة في الوقت الفعلي.
مع تقييم سوق السيارات ذاتية القيادة العالمي بأكثر من 27 مليار دولار أمريكي في عام 2021—والذي من المتوقع أن ينمو ليصل إلى ما يقرب من 62 مليار دولار بحلول عام 2026—فمن الواضح أن الذكاء الاصطناعي للـ القيادة الذاتية يرسم ملامح مستقبل النقل. في هذه المقالة، سنلقي نظرة فاحصة على كيفية تطبيق رؤية الحاسوب في السيارات ذاتية القيادة، مع تغطية تطبيقات رئيسية مثل اكتشاف المشاة، والتعرف على إشارات المرور، وأنظمة الحفاظ على المسار، مما يوضح كيف تُحدث هذه الابتكارات تحولاً في مستقبل القيادة.
Link to this sectionدور الذكاء الاصطناعي في السيارات ذاتية القيادة#
يمكن للذكاء الاصطناعي مساعدة السيارات ذاتية القيادة بشكل كبير في فهم محيطها واتخاذ قرارات في الوقت الفعلي. دعونا نستكشف كيف يساعد الذكاء الاصطناعي، من بين تطبيقاته الكثيرة، في اكتشاف المشاة والتعرف على إشارات المرور، وهما عنصران أساسيان يعززان من موثوقية القيادة الذاتية.
Link to this sectionالذكاء الاصطناعي لاكتشاف المشاة#
تتطلب القيادة تركيزاً مستمراً ووعياً بما يحدث حولك أثناء تواجدك خلف المقود. يمكن للذكاء الاصطناعي في السيارات ذاتية القيادة المساعدة في جوانب لا حصر لها من استخدامنا اليومي للسيارات. على سبيل المثال، يمكن للذكاء الاصطناعي أن يلعب دوراً مهماً في الحفاظ على سلامة المشاة من خلال رصدهم والتنبؤ بحركاتهم. وفقاً لـ "دراسة حول اكتشاف المشاة في السيارات ذاتية القيادة"، تبدأ هذه العملية من كاميرات السيارة، المثبتة حول المركبة بالكامل لالتقاط رؤية شاملة للمحيط، بما في ذلك الطرق، والأرصفة، وممرات المشاة. تعمل هذه الكاميرات باستمرار على تلقي البيانات المرئية، مما يساعد السيارة على "رؤية" المشاة، حتى في المواقف المزدحمة أو الصعبة.
يمكن بعد ذلك معالجة البيانات المرئية المجمعة باستخدام نماذج رؤية الحاسوب مثل Ultralytics YOLOv8. وللقيام بذلك، تتمثل الخطوة الأولى في استخدام اكتشاف الأشياء الذي يستلزم تحديد موقع الأشياء المحتملة، مثل المشاة والمركبات وإشارات المرور، داخل الصورة. بمجرد اكتشافها، ينتقل نموذج الذكاء الاصطناعي إلى الخطوة التالية، وهي التصنيف—أي تحديد ماهية كل جسم تم اكتشافه. يتم تدريب النماذج على مجموعات بيانات ضخمة، مما يمكنها من التعرف على المشاة في أوضاع وظروف إضاءة وبيئات مختلفة، حتى عندما يكونون محجوبين جزئياً أو في حالة حركة.
بينما تتفوق بعض نماذج رؤية الحاسوب في الاكتشاف والتصنيف، تركز نماذج أخرى على مهام مثل التنبؤ بحركة المشاة المكتشفين. في هذه الأنظمة، وبمجرد تصنيف الجسم كمشاة، يخطو نموذج الذكاء الاصطناعي خطوة أبعد من خلال التنبؤ بحركتهم التالية. على سبيل المثال، إذا كان شخص ما يقف عند حافة ممر المشاة، يمكن للسيارة توقع ما إذا كان قد يخطو إلى الطريق. تعد هذه القدرة التنبؤية ضرورية للمركبة لتتفاعل في الوقت الفعلي عن طريق الإبطاء أو التوقف أو تغيير الاتجاه لتجنب أي خطر محتمل. ولجعل هذه القرارات أكثر ذكاءً، يمكن لأنظمة الذكاء الاصطناعي دمج البيانات المرئية من الكاميرات مع مدخلات من مستشعرات أخرى مثل LIDAR، مما يمنح السيارة فهماً أكثر اكتمالاً لمحيطها.
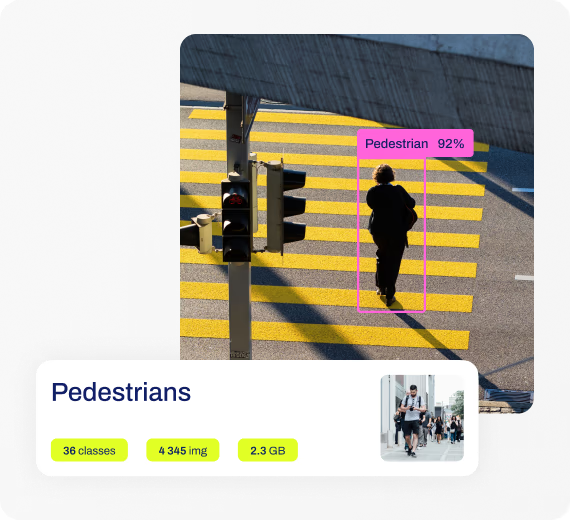
الشكل 1. Ultralytics YOLOv8 يكتشف أحد المشاة.
Link to this sectionالذكاء الاصطناعي للتعرف على إشارات المرور#
يعد التعرف على إشارات المرور، المعروف اختصاراً بـ TSR، جزءاً مهماً آخر في السيارات ذاتية القيادة. فهو يساعد المركبة على التعرف على إشارات الطريق والاستجابة لها في الوقت الفعلي، مثل علامات التوقف، والسرعة المحددة، والاتجاهات. وهذا يضمن التزام السيارة بقواعد المرور، وتجنب الحوادث، والسماح للركاب بالاستمتاع برحلة سلسة وآمنة.
في جوهر تقنية TSR توجد خوارزميات تعلم عميق تستخدم كاميرات السيارة لتحديد الإشارات. تحتاج هذه الأنظمة إلى العمل في ظروف مختلفة مثل المطر، أو الإضاءة المنخفضة، أو عندما يتم عرض الإشارة من زاوية معينة. تعتمد الأساليب القديمة على تقنيات مثل تحليل شكل ولون الإشارات، لكنها قد تفشل غالباً في المواقف المعقدة، مثل سوء الأحوال الجوية.
في ورقة بحثية بعنوان "نهج قائم على YOLOv8 لاكتشاف إشارات المرور متعددة الفئات"، يصف المؤلفون استخدام نموذج YOLOv8 لتحديد مناطق الصور التي توجد فيها إشارات المرور. تم تدريب النموذج على مجموعة بيانات تتضمن صوراً لإشارات المرور في ظروف مختلفة، مثل الزوايا، والإضاءة، والمسافات المتنوعة. بمجرد أن يقوم نموذج YOLOv8 بـ اكتشاف المناطق التي تحتوي على إشارات المرور، فإنه يصنفها بدقة، محققاً دقة مثيرة للإعجاب بنسبة 80.64%. يمكن لهذه القدرات أن تساعد المركبات ذاتية القيادة في فهم ظروف الطريق من خلال تحديد إشارات المرور المهمة في الوقت الفعلي، مما قد يساهم في اتخاذ قرارات قيادة أكثر أماناً.

الشكل 2. نموذج رؤية الحاسوب يكتشف ويصنف إشارة مرور بدقة، مما يتيح التنقل الآمن للمركبات ذاتية القيادة. (المصدر: computervision.zone)
Link to this sectionفوائد الذكاء الاصطناعي في السيارات ذاتية القيادة#
يغير الذكاء الاصطناعي تدريجياً طريقة عمل السيارات ذاتية القيادة، مما يجعلها أكثر أماناً وكفاءة. بفضل الخوارزميات الذكية والقدرة على معالجة البيانات بسرعة، يمكن لهذه السيارات رصد المخاطر، واتخاذ قرارات قيادة أفضل، وحتى تقليل أثرها على البيئة. فيما يلي بعض الفوائد الرئيسية التي يجلبها الذكاء الاصطناعي للسيارات ذاتية القيادة.
Link to this sectionتحسين السلامة#
يتمتع الذكاء الاصطناعي بالقدرة على تعزيز السلامة في السيارات ذاتية القيادة من خلال تمكين الاكتشاف والاستجابة للمخاطر في الوقت الفعلي. وفقاً لتقرير صادر عن الإدارة الوطنية للسلامة على الطرق السريعة (NHTSA)، فإن 94% من الحوادث الخطيرة ترجع إلى خطأ بشري. يمتلك الذكاء الاصطناعي القدرة على تقليل مثل هذه الحوادث من خلال التفاعل بشكل أسرع من السائقين البشر، مما قد يقلل من معدلات الحوادث بنسبة 90% مع زيادة تقدم الأنظمة ذاتية القيادة.
Link to this sectionتدفق مروري أكثر سلاسة وكفاءة في استهلاك الوقود#
لا يساعد الذكاء الاصطناعي في اكتشاف أشياء المركبات ذاتية القيادة في السلامة فحسب، بل يحسن أيضاً من تدفق حركة المرور. باستخدام الذكاء الاصطناعي، يمكن لهذه المركبات تعديل سرعتها، والحفاظ على المسافة المثلى، وتقليل الحاجة إلى الكبح أو التسارع المفاجئ، وكل ذلك يساعد في تقليل الازدحام المروري. كما تعمل خوارزميات الذكاء الاصطناعي على تحسين كفاءة الوقود من خلال ضمان اتباع السيارات لأكثر الطرق كفاءة، وتجنب التوقفات غير الضرورية، وإدارة استهلاك الوقود بشكل أفضل من السائقين البشر. ونتيجة لذلك، لا يعمل الذكاء الاصطناعي على تحسين تجربة القيادة فحسب، بل يساهم أيضاً في تقليل الانبعاثات وتكاليف الوقود.
Link to this sectionمستقبل السيارات ذاتية القيادة#
يدور مستقبل السيارات ذاتية القيادة حول تحقيق المستوى الخامس من الاستقلالية (Level 5)، وهو ما يعني قيادة ذاتية بالكامل دون الحاجة إلى تدخل بشري، بغض النظر عن البيئة أو الموقف. لفهم الاتجاه الذي تسير فيه التكنولوجيا، من المهم تقسيم مستويات القيادة الذاتية الخمسة كما حددتها جمعية مهندسي السيارات (SAE):
- المستوى 0: لا يوجد أتمتة. السائق البشري هو المسؤول تماماً.
- المستوى 1: مساعدة السائق. أنظمة أساسية مثل مثبت السرعة تساعد في القيادة ولكنها تتطلب إشرافاً بشرياً.
- المستوى 2: أتمتة جزئية. يمكن للمركبة التحكم في كل من التوجيه والتسارع، ولكن يجب أن يظل السائق منتبهاً ومستعداً لتولي القيادة.
- المستوى 3: أتمتة مشروطة. يمكن للمركبة إدارة معظم مهام القيادة، ولكن يلزم التدخل البشري في المواقف المعقدة.
- المستوى 4: أتمتة عالية. يمكن للسيارة قيادة نفسها في معظم البيئات والظروف، على الرغم من أنه قد لا يزال يلزم وجود سائق في الظروف القاسية.
- المستوى 5: أتمتة كاملة. المركبة ذاتية القيادة بالكامل ويمكنها العمل في جميع الظروف دون أي مدخلات بشرية.
حالياً، تعمل معظم المركبات المتاحة تجارياً عند المستوى 2 من الاستقلالية، حيث يمكن للسيارة المساعدة في التوجيه والتحكم في السرعة ولكنها لا تزال تتطلب بقاء السائق منتبهاً. مرسيدس-بنز هي واحدة من أوائل الشركات التي حققت المستوى 3 من الاستقلالية، والذي يسمح للسائقين في ظل ظروف محددة برفع أيديهم عن عجلة القيادة، وإبعاد أعينهم عن الطريق — والاستمتاع بمحيطهم.
ومع ذلك، فإن الوصول إلى المستوى 5 من الاستقلالية—حيث يمكن للمركبات التنقل عبر جميع التضاريس، من مراكز المدن المزدحمة إلى الطرق الريفية النائية، بدون خرائط أو تدخل بشري—يمثل تحديات كبيرة. تشمل هذه التحديات تطوير ذكاء اصطناعي متقدم يمكنه اتخاذ قرارات في الوقت الفعلي في بيئات غير متوقعة، والتعامل مع الظروف الجوية المعقدة، وضمان السلامة عبر جميع سيناريوهات القيادة.
Link to this sectionأبرز النقاط#
يعد الذكاء الاصطناعي المفتاح لجعل السيارات ذاتية القيادة أكثر واقعية. فهو يساعد هذه المركبات على اكتشاف الأشياء، والتعرف على إشارات المرور، والبقاء في مساراتها، وبفضل نماذج رؤية الحاسوب مثل YOLOv8، المساعدة في إدارة حركة المرور، وتحسين إدارة مواقف السيارات، مما يجعل القيادة أكثر أماناً وسلاسة. تسمح تقنيات مثل YOLO وCNNs للسيارات باتخاذ قرارات ذكية على الطريق. في الوقت الحالي، تعمل معظم السيارات ذاتية القيادة عند المستوى 2، حيث تساعد في القيادة ولكنها لا تزال بحاجة إلى انتباه بشري، ويجري اختبار المستوى 3 من الاستقلالية، مما يسمح بالقيادة المحدودة بدون استخدام اليدين.
التحدي الكبير القادم هو الوصول إلى المستوى 5 من الاستقلالية، حيث يمكن للسيارات قيادة نفسها في أي ظرف دون مساعدة بشرية. سيتطلب هذا المزيد من العمل للتعامل مع الأحداث غير المتوقعة وإنشاء أنظمة قادرة على اتخاذ قرارات في الوقت الفعلي في جميع المواقف. مع تحسن الذكاء الاصطناعي، تقترب السيارات ذاتية القيادة بالكامل، مما يعد بطرق أكثر أماناً وتجربة قيادة أكثر راحة.
هل تشعر بالفضول تجاه الذكاء الاصطناعي؟ استكشف مستودع GitHub الخاص بنا للتعمق في المشاريع الرائدة والتواصل مع مجتمعنا المتنامي. من اختراقات الرعاية الصحية إلى الابتكارات في القيادة الذاتية، نحن نقود مستقبل الذكاء الاصطناعي!






