استكشاف كشف الأجسام الصغيرة باستخدام Ultralytics YOLO11
اكتشف كيف يقدم Ultralytics YOLO11 كشفاً سريعاً ودقيقاً للأجسام الصغيرة عبر تطبيقات واقعية مثل المراقبة والروبوتات.

يمكن للطائرات بدون طيار المدمجة برؤية الذكاء الاصطناعي التحليق على ارتفاع مئات الأمتار فوق سطح الأرض، ومع ذلك يُتوقع منها اكتشاف شخص يظهر كبضع وحدات بكسل فقط في بث الفيديو الخاص بها. في الواقع، يمثل هذا تحديًا شائعًا في تطبيقات مثل الروبوتات، والمراقبة، والاستشعار عن بعد، حيث يجب على الأنظمة تحديد الأجسام الصغيرة جدًا داخل الصورة.
لكن نماذج كشف الأجسام التقليدية قد تواجه صعوبة في القيام بذلك. فالأجسام الصغيرة في الصور ومقاطع الفيديو تمثل معلومات بصرية محدودة للغاية. ببساطة، عندما ينظر النموذج إليها، لا يوجد الكثير من التفاصيل التي يمكن التعلم منها أو التعرف عليها.
خلف الكواليس، تعتمد هذه النماذج عادةً على بنية تعتمد على الشبكة العصبية التلافيفية (CNN). تمر الصور عبر طبقات الشبكة وتتحول إلى خرائط ميزات أو تمثيلات مبسطة تبرز الأنماط ذات الصلة بدلاً من وحدات البكسل الخام.
مع تحرك الصورة بشكل أعمق عبر الشبكة، تصبح خرائط الميزات هذه أصغر. وهذا يجعل الحساب أسرع، لكنه يعني أيضًا أن التفاصيل الدقيقة قد تختفي.
بالنسبة للأجسام الصغيرة جدًا، تكون هذه التفاصيل حاسمة. بمجرد اختفاء هذه التفاصيل، قد يواجه نموذج الرؤية الحاسوبية صعوبة في اكتشاف الجسم، مما قد يؤدي إلى مربعات إحاطة أقل دقة أو غير متسقة.
تجعل أنظمة الرؤية الحاسوبية الشاملة في الوقت الفعلي هذا الأمر أكثر صعوبة. تساعد الصور عالية الدقة في الحفاظ على التفاصيل، لكنها تبطئ الاستدلال وتتطلب المزيد من طاقة GPU. تعمل الدقات المنخفضة بشكل أسرع، لكن يصبح اكتشاف الأجسام الصغيرة أكثر صعوبة.
يصبح الأمر عملية موازنة مستمرة بين السرعة والدقة وحدود الأجهزة. بفضل التطورات التقنية الأخيرة، تم تصميم نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 و Ultralytics YOLO26 القادم لإدارة هذه المقايضة بشكل أكثر فعالية.

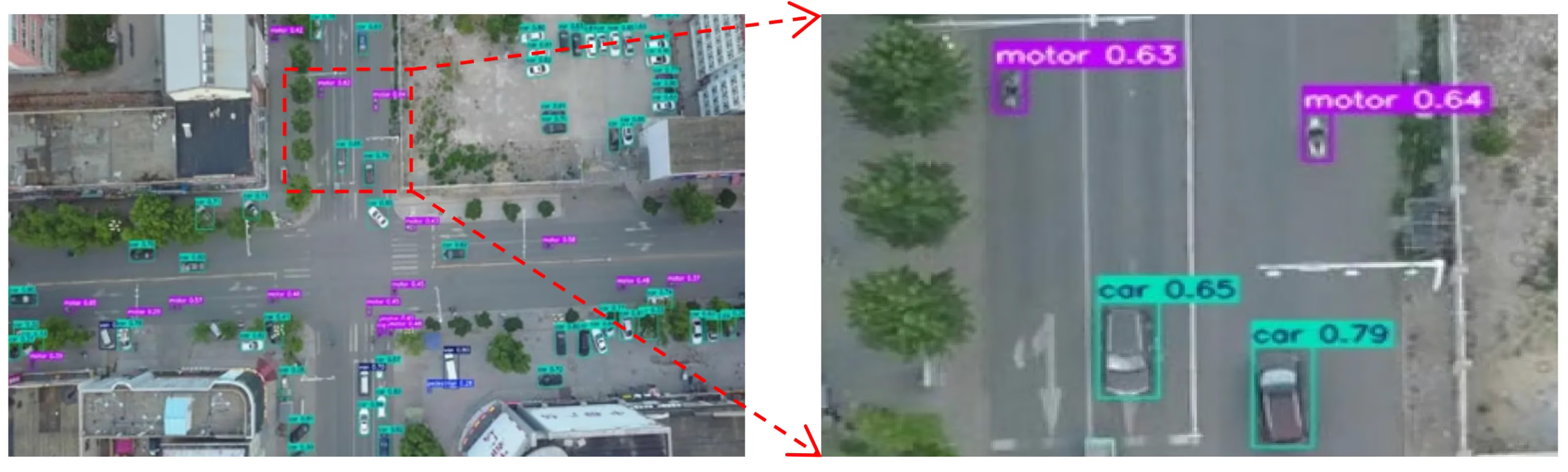
الشكل 1. استخدام YOLO11 لاكتشاف الأجسام الصغيرة في التصوير الجوي (المصدر)
في هذه المقالة، سنستكشف سبب صعوبة اكتشاف الأجسام الصغيرة وكيف يمكن لـ YOLO11 تسهيل الأمر. لنبدأ!
Link to this sectionما هو اكتشاف الأجسام الصغيرة ولماذا هو مهم؟#
اكتشاف الأجسام الصغيرة هو مهمة في الرؤية الحاسوبية، وهي فرع من فروع الذكاء الاصطناعي، تركز على تحديد وتحديد مواقع الأجسام التي تشغل جزءًا صغيرًا جدًا من الصورة. غالبًا ما يتم تمثيل هذه الأجسام داخل الصورة بعدد محدود من وحدات البكسل، وهي أصغر وحدات الصورة الرقمية. وهذا يجعلها أصعب في الاكتشاف مقارنة بالأهداف الأكبر والأكثر وضوحًا (التي غالبًا ما تحتوي على المزيد من البكسلات).
على سبيل المثال، يمكن للمركبات في التصوير الجوي، أو الأدوات في أرض المصنع، أو الأشخاص الذين تلتقطهم كاميرات المراقبة واسعة الزاوية، أن تظهر جميعها كأجسام صغيرة داخل الصورة. يعد اكتشافها أمرًا مهمًا لأنها غالبًا ما تحمل معلومات حيوية، وتعتمد العديد من التطبيقات الواقعية، مثل المراقبة، على هذه الاكتشافات لتعمل بشكل صحيح.
عندما يتم فقدان الأجسام الصغيرة، يمكن أن يتأثر أداء النظام وصنع القرار. تعد مراقبة المركبات الجوية غير المأهولة (UAV) مثالًا جيدًا، حيث قد يؤدي فقدان جسم متحرك صغير على الأرض إلى التأثير على دقة الملاحة أو التتبع.
Link to this sectionالتحديات المتعلقة باكتشاف الأجسام الصغيرة#
استخدمت الأنظمة السابقة ميزات مصممة يدويًا وطرق رؤية حاسوبية تقليدية، والتي واجهت صعوبات في المشاهد المزدحمة أو المتنوعة. حتى اليوم، مع أداء نماذج التعلم العميق بشكل أفضل بكثير، لا يزال اكتشاف الأهداف الصغيرة أمرًا صعبًا عندما تشغل جزءًا صغيرًا فقط من الصورة.
بعد ذلك، دعونا نلقي نظرة على بعض التحديات الشائعة التي تظهر عبر سيناريوهات العالم الحقيقي المختلفة عند اكتشاف الأجسام الصغيرة.
Link to this sectionالحجم، البكسلات، وفقدان المعلومات#
تحتوي الأجسام الصغيرة على عدد قليل جدًا من وحدات البكسل، مما يحد من مقدار التفاصيل البصرية التي يمكن للنموذج تعلمها خلال مراحل مثل استخراج الميزات. ونتيجة لذلك، يصعب اكتشاف أنماط مثل الحواف، والأشكال، والقوام، مما يجعل الأجسام الصغيرة أكثر عرضة للاندماج في الخلفية.
بينما تتحرك الصور عبر الطبقات التلافيفية للشبكة العصبية، يتم ضغط المعلومات البصرية الموجودة في وحدات البكسل تدريجيًا إلى خرائط ميزات. يساعد هذا النموذج على البقاء فعالًا، لكنه يعني أيضًا أن التفاصيل الدقيقة تتلاشى.
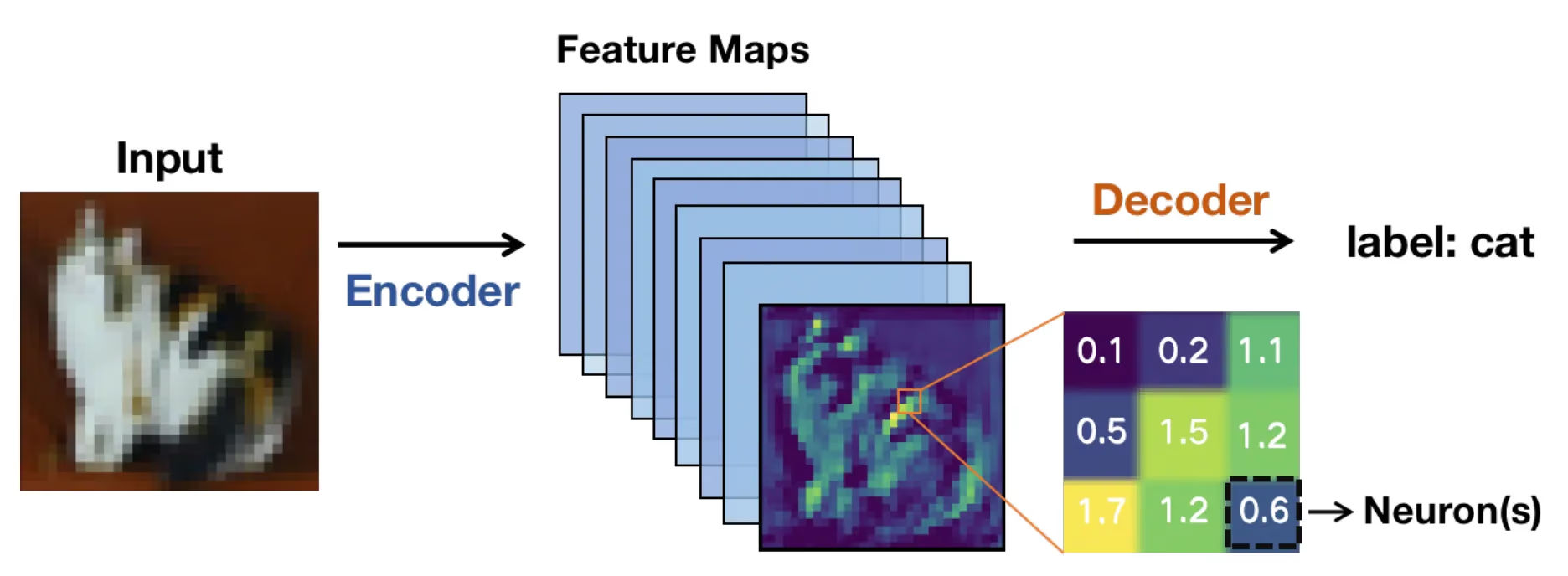
الشكل 2. تمثل خرائط الميزات الأنماط البصرية في الصورة (المصدر)
بالنسبة للأهداف الصغيرة، يمكن أن تختفي الإشارات المهمة قبل أن تتاح لشبكة الاكتشاف فرصة للعمل. عندما يحدث ذلك، تصبح عملية التحديد أقل موثوقية، وقد تتحرك مربعات الإحاطة أو تتداخل أو تفوت الأجسام المستهدفة تمامًا.
Link to this sectionالانسداد، تباين النطاق، والسياق#
غالبًا ما تنتج التحديات المتعلقة بالحجم عن الانسداد. يحدث الانسداد عندما تكون الأجسام، وخاصة الصغيرة منها، مخفية جزئيًا بواسطة أجسام أخرى في المشهد.
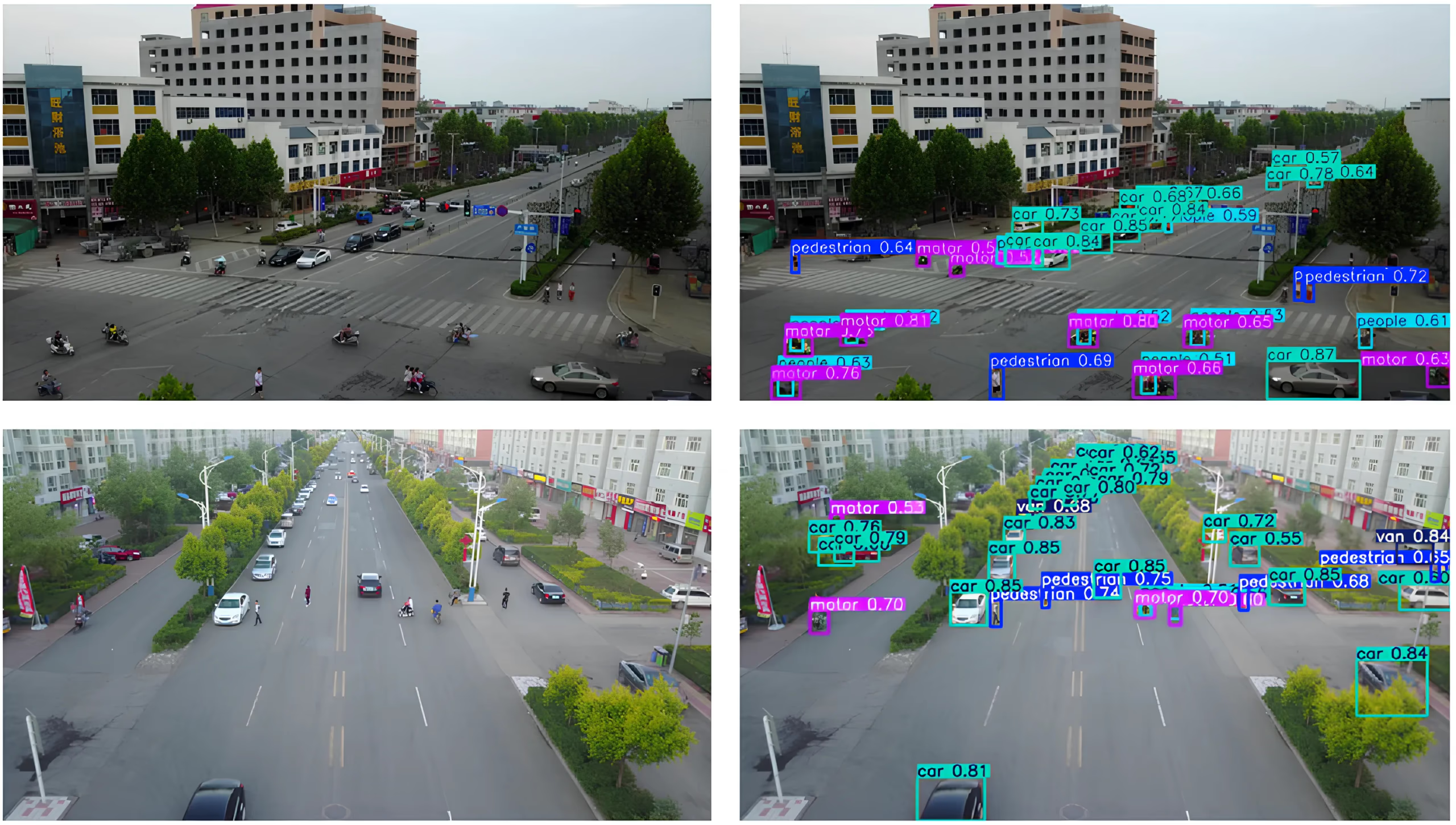
يقلل هذا من المساحة المرئية للهدف، مما يحد من المعلومات المتاحة لكاشف الأجسام. حتى الانسداد الصغير يمكن أن يربك شبكات الاكتشاف، خاصة عند دمجه مع مدخلات منخفضة الدقة. يمكن رؤية مثال مثير للاهتمام على ذلك في مجموعات بيانات المركبات الجوية بدون طيار مثل VisDrone، حيث قد يتم حجب المشاة أو الدراجات أو المركبات جزئيًا بواسطة المباني أو الأشجار أو غيرها من الأجسام المتحركة.
الشكل 3. مثال من مجموعة بيانات VisDrone يظهر أجسامًا صغيرة (المصدر)
وبالمثل، يقدم تباين النطاق طبقة أخرى من الصعوبة عندما يظهر نفس الجسم صغيرًا جدًا أو كبيرًا نسبيًا اعتمادًا على المسافة وموقع الكاميرا. على الرغم من هذه العقبات، يجب على خوارزميات الاكتشاف التعرف على هذه الأجسام الصغيرة عبر نطاقات مختلفة دون فقدان الدقة.
يلعب السياق أيضًا دورًا مهمًا في الاكتشاف. على سبيل المثال، عادة ما تظهر الأجسام الكبيرة مع محيط واضح يوفر إشارات بصرية مفيدة. من ناحية أخرى، غالبًا ما تفتقر الأهداف الصغيرة إلى هذه المعلومات السياقية، مما يجعل التعرف على الأنماط أكثر صعوبة.
Link to this sectionمشكلة المقياس الخفي في اكتشاف الأجسام الصغيرة#
تقيس مقاييس التقييم الشائعة، مثل التقاطع فوق الاتحاد (IoU)، مدى تداخل مربع الإحاطة المتوقع مع مربع الحقيقة الأرضية. بينما يعمل IoU بشكل جيد للأجسام الأكبر، فإن سلوكه مختلف تمامًا بالنسبة للأجسام الصغيرة.
تشغل الأجسام الصغيرة بضع وحدات بكسل فقط، لذا فإن حتى التحول البسيط في المربع المتوقع يمكن أن يخلق خطأ تناسبيًا كبيرًا ويخفض درجة IoU بشكل حاد. وهذا يعني أن الأجسام الصغيرة غالبًا ما تفشل في تلبية عتبة IoU القياسية المستخدمة لحساب التنبؤ كصحيح، حتى عندما يكون الجسم مرئيًا في الصورة.
ونتيجة لذلك، من المرجح تصنيف أخطاء التحديد كإيجابيات كاذبة أو سلبيات كاذبة. دفعت هذه القيود الباحثين إلى إعادة التفكير في كيفية تقييم أنظمة كشف الأجسام والتعامل مع الأهداف الصغيرة التي يصعب اكتشافها.
Link to this sectionميزات متعددة النطاقات: مفتاح اكتشاف الأجسام الصغيرة في الوقت الفعلي#
بينما عمل الباحثون على تحسين اكتشاف الأجسام الصغيرة، أصبح من الواضح أن الحفاظ على المعلومات البصرية وتمثيلها عبر نطاقات متعددة أمر ضروري. يتردد صدى هذه الرؤية في أبحاث arXiv الأخيرة وفي الأوراق المقدمة في أماكن مثل مؤتمرات IEEE الدولية وجمعية الرؤية الحاسوبية الأوروبية (ECCV).
بينما تتحرك الصور بشكل أعمق عبر الشبكة العصبية، يمكن للأجسام الصغيرة أن تفقد التفاصيل أو تختفي تمامًا، وهذا هو السبب في أن نماذج الرؤية الحاسوبية الحديثة مثل YOLO11 تضع تركيزًا قويًا على استخراج ميزات أفضل. بعد ذلك، دعونا نمر عبر المفاهيم الأساسية وراء خرائط الميزات وشبكات الهرم الميزات لفهمها بشكل أفضل.
Link to this sectionخرائط الميزات وتمثيل النطاق#
عندما تدخل صورة مدخلة، مثل صورة الاستشعار عن بعد، إلى شبكة عصبية، يتم تحويلها تدريجيًا إلى خرائط ميزات. هذه هي تمثيلات مبسطة للصورة تسلط الضوء على الأنماط البصرية مثل الحواف، والأشكال، والقوام.
مع تعمق الشبكة، تصبح خرائط الميزات هذه أصغر في الحجم المكاني. يساعد هذا الاختزال النموذج على العمل بكفاءة والتركيز على المعلومات عالية المستوى. ومع ذلك، فإن تقليص وخرائط الميزات العميقة يقلل أيضًا من التفاصيل المكانية.
الشكل 4. استخراج الميزات هو المفتاح لاكتشاف الأجسام الصغيرة. (المصدر)
بينما تحتفظ الأجسام الكبيرة بمعلومات بصرية كافية للاكتشاف الدقيق، قد تفقد الأهداف الصغيرة تفاصيل مهمة بعد طبقات قليلة فقط من الشبكة. عندما يحدث هذا، قد يواجه النموذج صعوبة في التعرف على وجود جسم صغير حتى. هذا هو أحد الأسباب الرئيسية لفقدان الأجسام الصغيرة في نماذج كشف الأجسام العميقة.
Link to this sectionشبكات هرم الميزات والتعلم متعدد النطاقات#
شبكات هرم الميزات، والتي تسمى غالبًا FPN، تم تقديمها لمعالجة فقدان التفاصيل المكانية، وهي تعمل كوحدة داعمة تجمع المعلومات من طبقات متعددة حتى تتمكن النماذج من اكتشاف الأجسام الصغيرة بشكل أكثر فعالية. تُعرف هذه العملية أيضًا باسم تجميع الميزات ودمج الميزات.
توفر الطبقات الضحلة تفاصيل مكانية دقيقة، بينما تضيف الطبقات العميقة سياقًا دلاليًا، مما يسمح بتعلم ميزات فعال متعدد النطاقات. على عكس إعادة التعيين الساذجة، التي تقوم ببساطة بتكبير خرائط الميزات، تحافظ FPN على المعلومات الهادفة وتحسن اكتشاف الأجسام الصغيرة.
تبني الأساليب الحديثة على هذه الفكرة باستخدام دمج الميزات التكيفي والتصاميم الواعية بالسياق لتعزيز اكتشاف الأهداف الصغيرة بشكل أكبر. بمعنى آخر، تساعد FPN النماذج على رؤية الصورة الكبيرة والتفاصيل الدقيقة في نفس الوقت. هذا التحسين ضروري عندما تكون الأجسام صغيرة.
Link to this sectionكيف تطورت نماذج كشف الأجسام للتعامل مع الأجسام الصغيرة#
إليك لمحة عن كيفية تطور نماذج كشف الأجسام وتقدمها بمرور الوقت لاكتشاف الأجسام ذات الأحجام المختلفة بشكل أفضل، بما في ذلك الأجسام الصغيرة جدًا:
- طرق الكشف المبكرة: اعتمدت أساليب كشف الأجسام المبكرة على ميزات مصممة يدويًا وخوارزميات قائمة على القواعد متجذرة في معالجة الصور الكلاسيكية. نظرًا لأن هذه الميزات كانت ثابتة، تدهور الأداء مع الصور المختلفة.
- إدخال تعلم الآلة والتعلم العميق: مثل اعتماد تعلم الآلة والتعلم العميق تحولًا كبيرًا في أبحاث كشف الأجسام. بدلاً من الاعتماد على قواعد محددة مسبقًا، تعلمت الشبكات العصبية تمثيلات بصرية مباشرة من بيانات التدريب، مما أدى إلى تحسين القدرة على التكيف عبر أحجام الأجسام والمشاهد المختلفة.
- الشبكات التلافيفية: تتعلم هذه الشبكات العصبية رؤية الأنماط في الصور. تلتقط كل طبقة تفاصيل مختلفة، بدءًا من الحواف والألوان البسيطة، ثم الأشكال، وفي النهاية الأجسام الكاملة، مما يجعلها ضرورية للرؤية الحاسوبية الحديثة.
- كاشفات الأجسام ثنائية المرحلة: قدمت الكاشفات ثنائية المرحلة، مثل Faster R-CNN، التي قدمها Girshick و Ren، مناطق مرشحة ثم صنفتها. أدى هذا النهج إلى تحسين الدقة للأجسام الصغيرة ولكنه زاد من التكلفة الحسابية وقلل من الأداء في الوقت الفعلي.
- كاشفات الأجسام أحادية المرحلة: تقوم الكاشفات أحادية المرحلة، مثل SSD (كاشف اللقطة الواحدة) وعائلة YOLO (أنت تنظر مرة واحدة فقط)، بما في ذلك YOLOv3، و Ultralytics YOLOv5، و Ultralytics YOLOv8 اللاحق، بإجراء الاكتشاف في تمريرة واحدة. يحسن هذا التصميم سرعة الاستدلال بشكل كبير مع الحفاظ على دقة تنافسية.
- أحدث النماذج المتطورة: تضع نماذج كشف الأجسام الأحدث تركيزًا أقوى على الأداء في الوقت الفعلي والنشر على الحافة. تم تصميم إصدارات نماذج Ultralytics YOLO الأخيرة، مثل Ultralytics YOLO11 و Ultralytics YOLO26 القادم، لتحقيق التوازن بين الدقة العالية والاستدلال منخفض التأخير، مما يجعلها مناسبة تمامًا لاكتشاف الأجسام بجميع أحجامها، بما في ذلك الأهداف الصغيرة، على الأجهزة ذات القدرة الحسابية المحدودة.
Link to this sectionاستخدام YOLO11 لحالات استخدام اكتشاف الأجسام الصغيرة#
الآن بعد أن أصبح لدينا فهم أفضل لكيفية عمل اكتشاف الأجسام الصغيرة، دعونا نلقي نظرة على زوج من التطبيقات الواقعية التي يمكن تطبيق YOLO11 فيها.
Link to this sectionالطائرات بدون طيار والتصوير الجوي#
تخيل طائرة بدون طيار تحلق عالياً فوق شارع مدينة مزدحم. من هذا الارتفاع، تتقلص السيارات والدراجات وحتى الناس إلى بضع وحدات بكسل فقط على الشاشة.
غالبًا ما تلتقط وحدات الطائرات بدون طيار والتصوير الجوي مشاهد مثل هذه، حيث تكون الأجسام محل الاهتمام صغيرة جدًا ومحاطة بخلفيات مزدحمة، مما يجعل اكتشافها تحديًا لنماذج الرؤية الحاسوبية.
في هذه الأنواع من السيناريوهات، يمكن أن يكون YOLO11 خيارًا مثاليًا للنموذج. على سبيل المثال، يمكن لطائرة بدون طيار مجهزة بنموذج مثل YOLO11 مراقبة حركة المرور في الوقت الفعلي، واكتشاف المركبات وراكبي الدراجات والمشاة أثناء تحركهم عبر المشهد، حتى عندما يشغل كل جسم جزءًا صغيرًا فقط من الصورة. وهذا يتيح اتخاذ قرارات أسرع ورؤى أكثر دقة في تطبيقات مثل إدارة المرور، أو السلامة العامة، أو التخطيط الحضري.
Link to this sectionالروبوتات والأتمتة#
غالبًا ما تُستخدم الروبوتات في بيئات تكون فيها الدقة والتوقيت حاسمين. في إعدادات مثل المستودعات، والمصانع، والمزارع، قد يحتاج الروبوت إلى التعرف على أجسام صغيرة جدًا، مثل جزء على خط التجميع، أو ملصق على طرد، أو برعم نبات صغير في حقل، والاستجابة بسرعة.
يمكن أن يكون اكتشاف الأجسام بهذا الحجم معقدًا، خاصة عندما تظهر كبضع وحدات بكسل فقط في بث الكاميرا أو تكون محجوبة جزئيًا بواسطة أجسام أخرى. قد يؤدي فقدان هذه التفاصيل الصغيرة إلى إبطاء الأتمتة أو التأثير على قدرة الروبوت على إكمال المهمة.
يمكن لـ YOLO11 إحداث فرق في هذه المواقف. استخراج الميزات المحسن والاستدلال السريع يمكن الروبوتات من اكتشاف الأجسام الصغيرة في الوقت الفعلي واتخاذ إجراءات فورية.
يدعم YOLO11 أيضًا تجزئة المثيلات، والتي يمكن أن تساعد الروبوتات على فهم حدود الأجسام ونقاط الإمساك بشكل أكثر دقة، بدلاً من مجرد تحديد مربعات الإحاطة العامة. على سبيل المثال، يمكن لذراع روبوتية مدمجة بـ YOLO11 رصد المكونات الصغيرة على حزام ناقل، وتجزئة شكلها الدقيق، والتقاطها قبل خروجها عن النطاق، مما يساعد النظام على البقاء فعالًا وموثوقًا.
Link to this sectionما الذي يجعل YOLO11 فعالاً لاكتشاف الأجسام الصغيرة#
مع توفر العديد من نماذج الرؤية الحاسوبية اليوم، قد تتساءل عما يجعل Ultralytics YOLO11 متميزًا.
إليك بضعة أسباب تجعل Ultralytics YOLO11 خيارًا رائعًا للتطبيقات التي تحتاج فيها الأجسام الصغيرة إلى الاكتشاف:
- استخراج ميزات أفضل: يستخدم YOLO11 بنية هيكل وعنق محسنة لتعزيز استخراج الميزات، مما يتيح كشف أجسام أكثر دقة.
- النظام البيئي وسهولة الاستخدام: حزمة Ultralytics Python هي مكتبة توفر وظائف مدمجة لتحميل وتدريب والتحقق من ونشر نماذج مثل YOLO11. نظرًا لأن هذه المهام تتطلب بضعة أسطر فقط من التعليمات البرمجية، يمكن للفرق تجربة النماذج وصقلها بسرعة لاكتشاف الأجسام الصغيرة.
- محسن للنشر على الحافة: يمكن لـ YOLO11 العمل بكفاءة على أجهزة الحافة مثل NVIDIA Jetson و Raspberry Pi وأنظمة الكاميرات الصناعية. ببساطة، إنه يتيح مهام رؤية الذكاء الاصطناعي في الوقت الفعلي مباشرة على الجهاز.
Link to this sectionاستراتيجيات عملية للاستخدام عند اكتشاف الأجسام الصغيرة باستخدام YOLO11#
بالإضافة إلى استخدام نموذج مثل YOLO11، فإن الطريقة التي تعد بها التعليقات التوضيحية الخاصة بك، ومجموعة البيانات الشاملة، وإجراء تدريب النموذج يمكن أن تحدث فرقًا كبيرًا في أداء الاكتشاف.
إليك نظرة عامة سريعة على ما يجب التركيز عليه:
- تعزيز البيانات المناسب: يمكن لتعزيز البيانات الخفيف، مثل القياس أو القص، مساعدة النموذج على التعميم على صور جديدة. ومع ذلك، قد يؤدي التعزيز العدواني واسع النطاق إلى تشويه أو إزالة الأجسام الصغيرة، مما يجعل من الصعب على النموذج تعلمها.
- النظر في حالات الفشل: يساعد تحليل الأماكن التي يخطئ فيها النموذج أو يسيء تحديد الأجسام في إنشاء خط أساس وكشف ما إذا كانت المشكلات تنبع من مجموعة البيانات، أو فقدان المعلومات أثناء استخراج الميزات، أو الحاجة إلى ضبط إعدادات التدريب.
- تكوين مجموعة البيانات: يجب أن تحتوي مجموعة البيانات الخاصة بك على أمثلة كافية للأجسام الصغيرة حتى يتمكن النموذج من تعلم أنماط هادفة، ويجب أن تظل متوازنة حتى لا تطغى الأجسام الأكبر على الأصغر أثناء التدريب.
Link to this sectionأبرز النقاط#
يعد اكتشاف الأجسام الصغيرة أمرًا صعبًا لأن الأهداف الصغيرة تفقد تفاصيلها أثناء تحرك الصور عبر نموذج الرؤية الحاسوبية. يحسن YOLO11 كيفية الحفاظ على هذه التفاصيل، مما يجعل اكتشاف الأجسام الصغيرة أكثر موثوقية دون التضحية بالأداء في الوقت الفعلي. يسمح هذا التوازن لـ YOLO11 بدعم كشف دقيق وفعال في تطبيقات العالم الحقيقي.
انضم إلى مجتمعنا المتنامي! استكشف مستودع GitHub الخاص بنا لمعرفة المزيد عن الذكاء الاصطناعي. اكتشف ابتكارات مثل الرؤية الحاسوبية في التجزئة و الذكاء الاصطناعي في صناعة السيارات من خلال زيارة صفحات الحلول الخاصة بنا. للبدء في البناء باستخدام الرؤية الحاسوبية اليوم، تحقق من خيارات الترخيص لدينا.






