تأثير تصميم Ultralytics YOLO26 الأسرع والأكثر تركيزاً على الحافة
شاهد كيف أن Ultralytics YOLO26 أسرع على الحافة ولماذا يهم ذلك لتطبيقات الرؤية الحاسوبية من الجيل التالي التي تتطلب زمن انتقال منخفض وكفاءة.
في وقت سابق من هذا الأسبوع، أطلقت Ultralytics رسمياً Ultralytics YOLO26، وهو نموذج YOLO أسرع وأخف وأصغر يهدف إلى إعادة تعريف كيفية أداء أنظمة الرؤية الحاسوبية على الحافة. يدعم YOLO26 نفس مهام الرؤية الأساسية مثل نماذج YOLO السابقة، بما في ذلك اكتشاف الكائنات وتجزئة المثيلات.

الشكل 1. مثال لاستخدام YOLO26 لتجزئة كائن.
الاختلاف الجوهري بين YOLO26 والنماذج السابقة هو البيئة التي صُمم للعمل فيها. فبدلاً من التحسين بشكل أساسي لوحدات معالجة الرسومات (GPUs) السحابية أو الأداء المعتمد على المقاييس المعيارية، صُمم YOLO26 من الألف إلى الياء للنشر في العالم الحقيقي على أجهزة الحافة والأجهزة المضمنة.
بينما تنتقل الرؤية الحاسوبية من البحث إلى الإنتاج، أصبحت حقيقة قيود الأداء أكثر وضوحاً. تتشكل بيئات الحافة من خلال ميزانيات زمن انتقال ضيقة، وذاكرة محدودة، وقيود الطاقة والحرارة، والحاجة إلى سلوك يمكن التنبؤ به عبر منصات متنوعة.
في هذه الإعدادات، لا يعتمد أداء النظام العام فقط على سرعة الاستدلال الخام، بل أيضاً على مدى كفاءة تشغيل خط المعالجة بالكامل. غالباً ما تكون تكاليف المعالجة اللاحقة، وضغوط الذاكرة، ومسارات التنفيذ الخاصة بالمنصة بمثابة اختناقات.
يعالج YOLO26 هذه التحديات من خلال اتباع نهج أسرع وأكثر ملاءمة للحافة ينظر إلى خط الاستدلال بالكامل بدلاً من مقاييس النموذج الفردية. ومن خلال التركيز على تحسين الحافة، وتبسيط خط الاستدلال، وإزالة خطوات المعالجة اللاحقة غير الضرورية، يقدم YOLO26 تحسينات في السرعة تؤدي إلى زمن انتقال أقل وسلوك أكثر موثوقية في الإنتاج.
في هذه المقالة، سنستكشف كيف تترجم الخيارات المعمارية لنموذج YOLO26 إلى تحسينات في الأداء في العالم الحقيقي، ولماذا تغير السرعة على الحافة بشكل جذري ما هو ممكن لتطبيقات الرؤية الحاسوبية من الجيل التالي.
Link to this sectionحقيقة النشر على الحافة#
إن تشغيل نماذج الرؤية الحاسوبية على الحافة يختلف تماماً عن تشغيلها في السحابة. في البيئات السحابية، عادة ما تتمتع الأنظمة بإمكانية الوصول إلى وحدات GPU قوية، وكميات كبيرة من الذاكرة، وأجهزة مستقرة. أما عند الحافة، فلا تنطبق هذه الافتراضات.
تعتمد معظم عمليات النشر على الحافة على بنى أجهزة متنوعة، وليس وحدات GPU. وعادة ما تستخدم الأجهزة معالجات متخصصة متعددة لمهام مختلفة، والتي يتم تحسينها للكفاءة واستهلاك الطاقة المنخفض بدلاً من سعة الحوسبة الخام لوحدات GPU السحابية.
يعد زمن الانتقال قيداً رئيسياً آخر. غالباً ما تعمل أنظمة الحافة ضمن حدود زمنية حقيقية ضيقة، حيث يمكن أن تؤثر حتى التأخيرات الصغيرة على الاستجابة أو السلامة. في هذه الحالات، يهم زمن الانتقال من البداية إلى النهاية أكثر من سرعة الاستدلال الخام. يمكن أن يكون النموذج سريعاً على الورق ولكنه لا يزال قاصراً بمجرد إضافة المعالجة اللاحقة وحركة البيانات.
تلعب الذاكرة أيضاً دوراً كبيراً. تمتلك العديد من أجهزة الحافة ذاكرة محدودة وذاكرات تخزين مؤقت مشتركة. يمكن أن تؤدي الموترات الوسيطة الكبيرة والاستخدام غير الفعال للذاكرة إلى إبطاء الأنظمة، حتى عندما يكون النموذج نفسه فعالاً.
تضيف قيود الطاقة والحرارة المزيد من القيود. غالباً ما تعمل أجهزة الحافة بدون تبريد نشط وضمن ميزانيات طاقة ثابتة. يجب أن يكون الأداء فعالاً ومستداماً، وليس مجرد سريع في فترات قصيرة.
علاوة على كل هذا، تتطلب عمليات النشر على الحافة الاتساق. يجب أن تتصرف النماذج بنفس الطريقة عبر الأجهزة وأوقات التشغيل. يمكن أن تؤدي التعليمات البرمجية الخاصة بالمنصة أو خطوات المعالجة اللاحقة المعقدة إلى تقديم اختلافات طفيفة تجعل الأنظمة أصعب في النشر والصيانة.
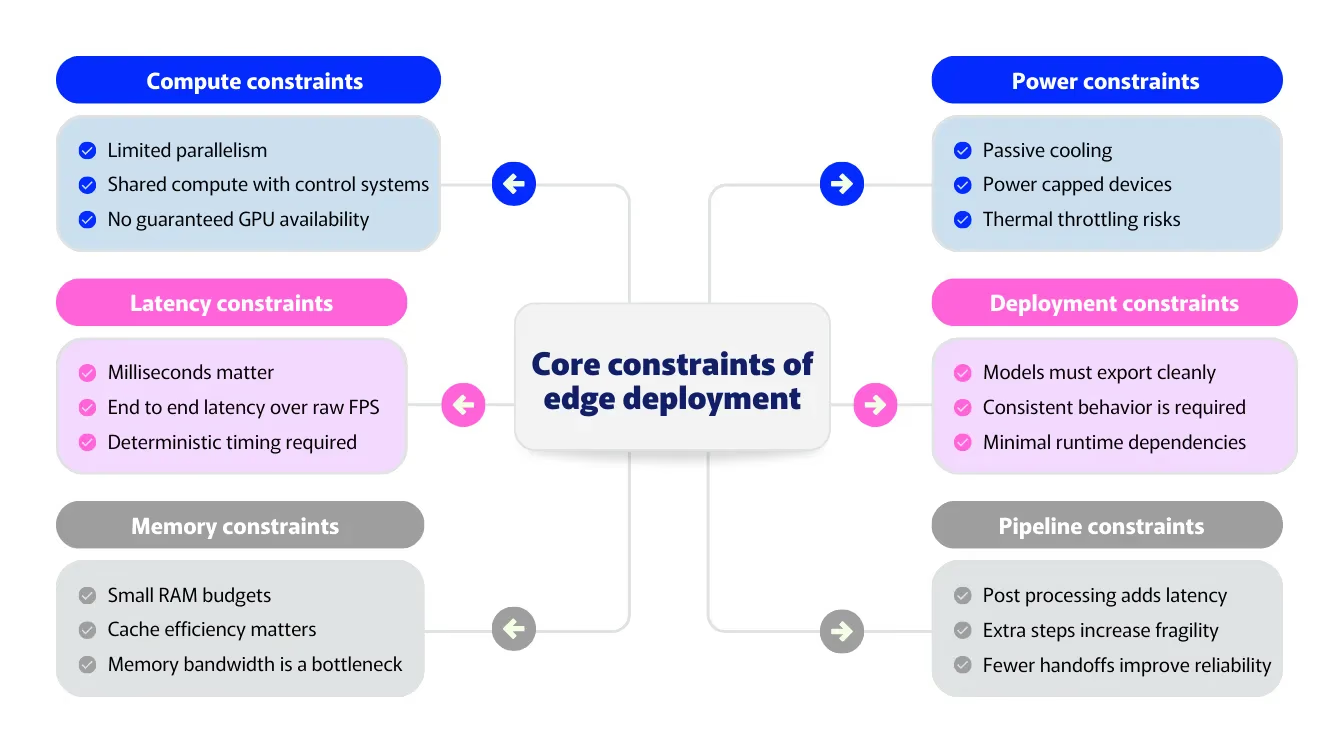
الشكل 2. نظرة على قيود النشر على الحافة. الصورة للمؤلف.
تحدد هذه القيود ما يعنيه الأداء حقاً عند الحافة. بعبارة أخرى، يتم تحديد الأداء من خلال خط المعالجة بالكامل، وليس من خلال مقياس واحد.
Link to this sectionلماذا تتطلب رؤية الحافة نموذج أداء مختلفاً#
إذاً، كيف ترتبط قيود النشر على الحافة بمتطلبات نموذج الرؤية الحاسوبية المصمم للحافة؟ يصبح الارتباط واضحاً بمجرد انتقال النماذج من إعدادات البحث إلى أنظمة العالم الحقيقي.
في البيئات السحابية، غالباً ما يتم قياس الأداء باستخدام معايير مثل سرعة الاستدلال والدقة. عند الحافة، لا تروي هذه المقاييس سوى جزء من القصة. تعمل أنظمة الرؤية عادة عبر أجهزة غير متجانسة، حيث يتم تفريغ استدلال الشبكة العصبية إلى مسرعات متخصصة بينما تعمل الأجزاء الأخرى من خط المعالجة على معالجات عامة الغرض.
في هذا السياق، لا تكفي سرعة النموذج. كيفية أداء النظام بأكمله بمجرد نشر النموذج هي المفتاح. يمكن أن يبدو النموذج سريعاً بمفرده، ولكنه لا يزال قاصراً إذا أضافت المعالجة اللاحقة، أو حركة البيانات، أو الخطوات الخاصة بالمنصة تكاليف إضافية.
لهذا السبب تتطلب رؤية الحافة نموذج أداء يركز على كفاءة مستوى النظام بدلاً من المقاييس المعيارية المعزولة. يعكس YOLO26 هذا التحول من خلال التركيز على تحسين الحافة، والاستدلال المبسط، والتنفيذ من البداية إلى النهاية المصمم للنشر في العالم الحقيقي.
Link to this sectionأساس السرعة: تصميم ملائم للحافة أولاً#
عند الحافة، يتم تحديد الأداء من خلال مدى توافق النموذج مع بنية الأجهزة الفعلية للجهاز. يضمن التصميم الموجه للحافة أولاً تشغيل أنظمة الرؤية بشكل موثوق عبر منصات العالم الحقيقي، بغض النظر عن المزيج المحدد لوحدات المعالجة المتاحة.
يعطي النهج الموجه للحافة الأولوية للتنفيذ المتوقع والفعال عبر الأجهزة غير المتجانسة، بدلاً من تكييف النماذج التي تم تحسينها لوحدات GPU السحابية بعد وقوع الأمر. ببساطة، يعني هذا تفضيل العمليات التي تترجم بشكل جيد إلى مسرعات الشبكة العصبية، وتقليل العمل غير العصبي خارج النموذج، وتقليل التعقيد غير الضروري الذي يمكن أن يبطئ التنفيذ من البداية إلى النهاية.
صُمم YOLO26 مع وضع هذه القيود في الاعتبار. تركز بنيته على الأداء المتسق بدلاً من ذروة الإنتاجية في الظروف المثالية. من خلال تبسيط مسارات التنفيذ والقضاء على الحوسبة غير الضرورية، يقلل YOLO26 من التكاليف عبر خط الاستدلال ويحقق استفادة أفضل من التسريع المتاح للجهاز وتسلسل الذاكرة الهرمي.
يحسن هذا النهج أيضاً الموثوقية. يؤدي التحسين الموجه للحافة إلى توقيت أكثر قابلية للتنبؤ وعدد أقل من طفرات الأداء، وهو أمر بالغ الأهمية لأنظمة الزمن الحقيقي. بدلاً من الاعتماد على أجهزة متخصصة أو معالجة لاحقة ثقيلة لتحقيق السرعة، يؤكد YOLO26 على الكفاءة طوال خط الاستدلال.
Link to this sectionالاستدلال من البداية إلى النهاية وتكلفة المعالجة اللاحقة#
قد تتساءل عما يعنيه القضاء على خطوات المعالجة اللاحقة غير الضرورية. لفهم ذلك، دعنا نتراجع خطوة إلى الوراء وننظر إلى كيفية عمل أنظمة اكتشاف الكائنات التقليدية.
في العديد من خطوط معالجة اكتشاف الكائنات، لا ينتهي الاستدلال عندما ينتج النموذج تنبؤاته. بدلاً من ذلك، يخرج النموذج عدداً كبيراً من مربعات الإحاطة المتداخلة، والتي تحتاج بعد ذلك إلى التصفية والتحسين قبل استخدامها. تحدث عملية التنظيف هذه من خلال خطوات المعالجة اللاحقة التي تعمل خارج النموذج نفسه.
إحدى أكثر خطوات المعالجة اللاحقة شيوعاً هي كبت غير الأعظمية، أو NMS. تقارن NMS مربعات الإحاطة المتداخلة وتحتفظ فقط بالتنبؤات الأكثر ثقة، مما يزيل التكرارات التي تشير إلى نفس الكائن. على الرغم من أن هذا النهج فعال، إلا أنه يقدم حوسبة إضافية بعد اكتمال الاستدلال.
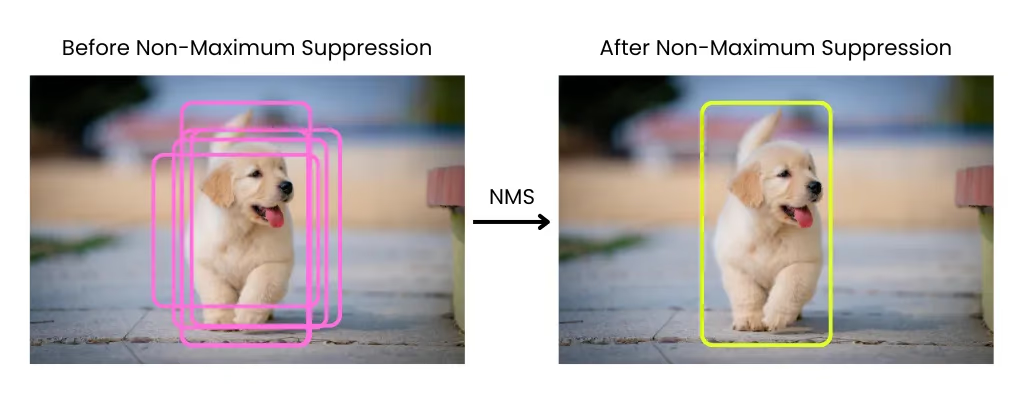
الشكل 3. فهم NMS. الصورة للمؤلف.
عند الحافة، يأتي هذا العمل الإضافي بتكلفة. خطوات المعالجة اللاحقة مثل NMS ليست مناسبة تماماً للمسرعات المتخصصة المستخدمة لاستدلال الشبكة العصبية، والتي تم تحسينها للحوسبة العصبية الكثيفة بدلاً من العمليات التي تستهلك الكثير من التحكم أو الذاكرة.
ونتيجة لذلك، تقدم NMS زمن انتقال إضافياً وتكاليف ذاكرة إضافية، وتنمو تكلفتها مع زيادة عدد التنبؤات. حتى عندما يكون النموذج نفسه سريعاً، لا تزال NMS قادرة على استهلاك جزء كبير من إجمالي وقت التشغيل.
تزيد المعالجة اللاحقة أيضاً من تعقيد النظام. نظراً لأنها تعيش خارج النموذج، يجب تنفيذها بشكل منفصل لأوقات تشغيل وأهداف أجهزة مختلفة. غالباً ما يؤدي هذا إلى مسارات تعليمات برمجية خاصة بالمنصة، وسلوك غير متسق عبر الأجهزة، وخطوط نشر أكثر هشاشة.
والأهم من ذلك، أن المعالجة اللاحقة تكسر فكرة الأداء الحقيقي من البداية إلى النهاية. لا يعكس قياس سرعة استدلال النموذج كيفية تصرف النظام في الإنتاج. ما يهم في النهاية هو الوقت الإجمالي من الإدخال إلى الإخراج النهائي، بما في ذلك كل خطوة في خط المعالجة.
في هذه المواقف، تصبح المعالجة اللاحقة عنق زجاجة مخفياً عند الحافة. فهي تضيف زمن انتقال، وتستهلك موارد وحدة المعالجة المركزية، وتعقد النشر، كل ذلك بينما تقع خارج النموذج نفسه.
Link to this sectionكيف يزيل YOLO26 تقنية NMS ولماذا يجعل ذلك منه أسرع#
يزيل YOLO26 تقنية NMS من خلال معالجة السبب الجذري للتنبؤات المكررة بدلاً من تنظيفها بعد الاستدلال. بدلاً من إنتاج العديد من التنبؤات المتداخلة التي تحتاج إلى تصفية، تم تدريب النموذج لتوليد مجموعة أصغر من التنبؤات النهائية الواثقة مباشرة.
يصبح هذا ممكناً من خلال تغيير كيفية تعلم التنبؤات أثناء التدريب. يشجع YOLO26 علاقة أكثر وضوحاً واحد لواحد بين الكائنات والتنبؤات، مما يقلل التكرار من مصدره. ونتيجة لذلك، يتم حل التنبؤات المكررة داخل الشبكة نفسها بدلاً من خلال المعالجة اللاحقة الخارجية.
لإزالة NMS تأثير فوري على أداء الحافة. نظراً لأن NMS لا تتوافق جيداً مع مسرعات الشبكة العصبية، فإن القضاء عليها يقلل من حركة الذاكرة ويتجنب خطوات المعالجة غير العصبية المكلفة. يؤدي هذا إلى تقليل زمن الانتقال من البداية إلى النهاية ويجعل الأداء أكثر قابلية للتنبؤ، خاصة على أجهزة الحافة حيث يمكن للمعالجة اللاحقة بخلاف ذلك استهلاك جزء ملحوظ من إجمالي وقت التشغيل.
كما أنه يبسط خط الاستدلال. مع وجود خطوات أقل خارج النموذج، هناك حركة بيانات أقل وعمليات تسليم أقل بين المكونات. مخرجات النموذج هي بالفعل النتيجة النهائية، مما يجعل التنفيذ أكثر قابلية للتنبؤ.
Link to this sectionإزالة DFL لتمكين الأداء الحقيقي من البداية إلى النهاية#
ابتكار آخر في YOLO26 هو إزالة خسارة بؤرية التوزيع، أو DFL، التي كانت تستخدم في نماذج YOLO السابقة لانحدار مربع الإحاطة. بدلاً من التنبؤ بإحداثيات مفردة مباشرة، تعلمت النماذج التي تستخدم DFL توزيعاً للقيم المحتملة ثم استخلصت مربع إحاطة نهائياً من ذلك التوزيع. ساعد هذا النهج في تحسين دقة التوطين وكان خطوة مهمة للأمام في الأجيال السابقة.
ومع ذلك، بمرور الوقت، قدمت DFL أيضاً مقايضات. يزيد التنبؤ بالتوزيعات من الحوسبة ويضيف تعقيداً إلى بنية النموذج، مما قد يبطئ الاستدلال على وحدات المعالجة المركزية ويجعل النماذج أصعب في التصدير عبر تنسيقات النشر. فرضت DFL أيضاً نطاقات انحدار ثابتة، والتي يمكن أن تحد من المرونة عند اكتشاف كائنات كبيرة جداً.
يزيل YOLO26 تقنية DFL كجزء من تحركه نحو تصميم أبسط من البداية إلى النهاية. أعيد تصميم انحدار مربع الإحاطة ليكون أكثر مباشرة، مما يقلل من الحوسبة غير الضرورية مع الحفاظ على الدقة. يتماشى هذا التغيير مع نهج YOLO26 الخالي من NMS.
Link to this sectionمن أين تأتي سرعة استدلال وحدة المعالجة المركزية بنسبة 43%#
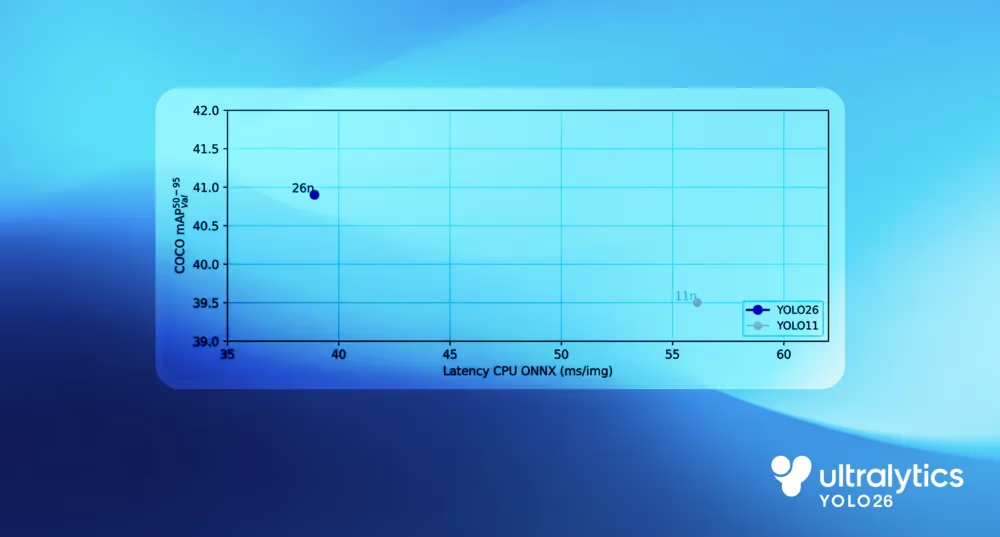
في المقاييس المعيارية المعتمدة على وحدة المعالجة المركزية، يُظهر YOLO26 تحسناً واضحاً في الأداء مقارنة بنماذج YOLO السابقة. بالمقارنة مع Ultralytics YOLO11، يوفر طراز YOLO26 nano استدلال وحدة معالجة مركزية أسرع بنسبة تصل إلى 43%، وهو فرق له تأثير ذو مغزى في عمليات النشر على الحافة في العالم الحقيقي.
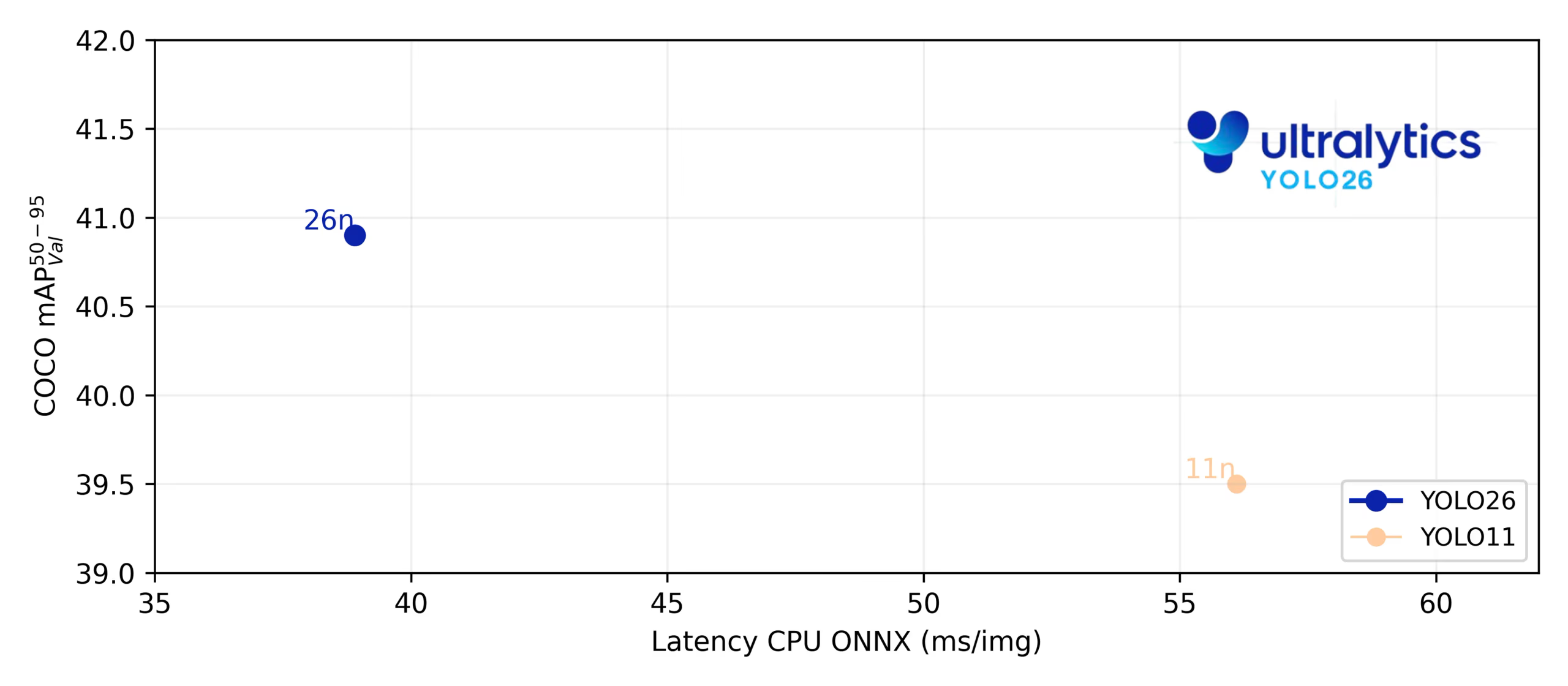
الشكل 4. قياس سرعة وحدة المعالجة المركزية لـ YOLO26.
يأتي هذا المكسب من تبسيط خط الاستدلال الكامل بدلاً من تحسين مكون واحد. يزيل التنفيذ من البداية إلى النهاية تكاليف المعالجة اللاحقة، وتقلل طريقة انحدار مربع الإحاطة الأكثر مباشرة من الحوسبة، وتعمل خيارات التصميم الموجهة لوحدة المعالجة المركزية أولاً على تحسين كفاءة التنفيذ على المعالجات عامة الغرض.
معاً، تقلل هذه التغييرات زمن الانتقال، وتخفض عبء عمل وحدة المعالجة المركزية، وتؤدي إلى أداء أسرع وأكثر اتساقاً على أجهزة الحافة في العالم الحقيقي.
Link to this sectionتأثير YOLO26 على النشر والتصدير على الحافة#
تمتد مكاسب أداء YOLO26 إلى ما هو أبعد من الاستدلال الأسرع. من خلال تبسيط النموذج وتقليل تكاليف الذاكرة، يصبح من الأسهل نشره وأكثر موثوقية للتشغيل عبر بيئات الحافة.
يعمل تصميم YOLO26 من البداية إلى النهاية أيضاً على تبسيط التصدير. مع وجود عدد أقل من المكونات المساعدة وعدم وجود خطوات معالجة لاحقة خارجية، تكون النماذج المصدرة مكتفية ذاتياً بالكامل. وهذا يقلل من التبعيات الخاصة بالمنصة ويساعد على ضمان سلوك متسق عبر أوقات التشغيل وأهداف الأجهزة.
عملياً، يعني هذا أنه يمكن نشر YOLO26 بسهولة أكبر على أجهزة الحافة مثل الكاميرات، والروبوتات، والأنظمة المضمنة، باستخدام تنسيقات تصدير متنوعة. ما تصدره هو ما تشغله، مع خطوات تكامل أقل ومخاطر أقل لحدوث انحراف في النشر.
Link to this sectionاستدلال الحافة الأسرع يتيح الروبوتات وذكاء الرؤية الصناعي#
حتى الآن، نظرنا إلى كيفية تحسين تصميم YOLO26 الموجه للحافة أولاً للأداء على مستوى النظام. ومع ذلك، يكمن التأثير الحقيقي في كيفية جعل ذكاء الرؤية الاصطناعي أسهل في التكامل مع تطبيقات العالم الحقيقي.
على سبيل المثال، في الروبوتات والبيئات الصناعية، غالباً ما تعمل أنظمة الرؤية تحت قيود زمن حقيقي صارمة. يجب اتخاذ القرارات بسرعة وبشكل متسق، باستخدام حوسبة محدودة ودون الاعتماد على الاتصال بالسحابة. مع Ultralytics YOLO26، يصبح تلبية هذه المتطلبات أمراً عملياً.
تستفيد تطبيقات مثل ملاحة الروبوت ومعالجة الكائنات من زمن انتقال أقل واستدلال أكثر قابلية للتنبؤ، مما يسمح للروبوتات بالاستجابة بسلاسة للتغيرات في بيئتها. وبالمثل، في الإعدادات الصناعية، يمكن لنماذج الرؤية أن تعمل مباشرة على خطوط الإنتاج لاكتشاف العيوب، وتتبع المكونات، ومراقبة العمليات دون تقديم تأخيرات أو تعقيد إضافي.
من خلال تمكين الاستدلال السريع والموثوق على أجهزة الحافة، يساعد YOLO26 في جعل ذكاء الرؤية الاصطناعي جزءاً طبيعياً من الروبوتات والأنظمة الصناعية، بدلاً من أن يكون تحدياً للنشر والصيانة.
Link to this sectionأبرز النقاط#
صُمم YOLO26 للحافة، حيث تحدد قيود العالم الحقيقي مثل زمن الانتقال، والذاكرة، والموثوقية ما هو ممكن. من خلال تصميم النموذج حول التنفيذ الموجه لوحدة المعالجة المركزية أولاً، والاستدلال من البداية إلى النهاية، والنشر الأبسط، يجعل YOLO26 ذكاء الرؤية الاصطناعي عملياً للدمج في الأنظمة الحقيقية. يتيح هذا النهج الموجه للحافة أولاً مجموعة واسعة من التطبيقات، من الروبوتات ورؤية الصناعة إلى الذكاء الاصطناعي المضمن وعلى الجهاز، حيث يكون الأداء والقابلية للتنبؤ أكثر أهمية.
انضم إلى مجتمعنا المتنامي واستكشف مستودع GitHub الخاص بنا للحصول على موارد الذكاء الاصطناعي العملية. للبناء باستخدام ذكاء الرؤية اليوم، استكشف خيارات الترخيص الخاصة بنا. تعرف على كيفية تحويل الذكاء الاصطناعي في الزراعة للزراعة وكيف يشكل ذكاء الرؤية في الرعاية الصحية المستقبل من خلال زيارة صفحات الحلول الخاصة بنا.






