Erkundung der Objekterkennung kleiner Objekte mit Ultralytics YOLO11
Entdecke, wie Ultralytics YOLO11 schnelle und präzise Erkennung kleiner Objekte in realen Anwendungen wie Überwachung und Robotik ermöglicht.

Drohnen mit integrierter Vision AI können hunderte Meter über dem Boden fliegen und dennoch eine Person erkennen, die im Videostream nur als wenige Pixel erscheint. Dies ist eine häufige Herausforderung in Bereichen wie Robotik, Überwachung und Fernerkundung, in denen Systeme sehr kleine Objekte innerhalb eines Bildes identifizieren müssen.
Herkömmliche Objekterkennungsmodelle haben damit jedoch oft Schwierigkeiten. Kleine Objekte in Bildern und Videos enthalten nur sehr begrenzte visuelle Informationen. Einfach ausgedrückt: Wenn ein Modell sie betrachtet, gibt es nur wenige Details, aus denen es lernen oder die es erkennen könnte.
Unter der Haube basieren diese Modelle typischerweise auf einer Architektur, die auf einem convolutional neural network (CNN) beruht. Bilder durchlaufen verschiedene Ebenen des Netzwerks und werden in Feature Maps oder vereinfachte Darstellungen umgewandelt, die relevante Muster anstelle von Rohpixeln hervorheben.
Während sich das Bild tiefer durch das Netzwerk bewegt, werden diese Feature Maps kleiner. Das macht die Berechnung zwar schneller, bedeutet aber auch, dass feine Details verschwinden können.
Für winzige Objekte sind diese Details entscheidend. Sobald sie verloren gehen, hat ein Computer-Vision-Modell möglicherweise Schwierigkeiten, das Objekt zu erkennen, was zu ungenaueren oder inkonsistenten Bounding Boxes führen kann.
Echtzeit-End-to-End-Computer-Vision-Systeme machen dies noch komplizierter. Hochauflösende Bilder helfen zwar, Details zu erhalten, verlangsamen aber die Inferenz und erfordern mehr GPU-Leistung. Niedrigere Auflösungen laufen zwar schneller, machen es aber noch schwieriger, kleine Objekte zu erkennen.
Es ist ein ständiger Balanceakt zwischen Geschwindigkeit, Genauigkeit und Hardwaregrenzen. Dank jüngster technologischer Fortschritte sind Computer-Vision-Modelle wie Ultralytics YOLO11 und das kommende Ultralytics YOLO26 darauf ausgelegt, diesen Kompromiss effektiver zu verwalten.

Abb. 1. Verwendung von YOLO11 zur Erkennung kleiner Objekte in Luftbildern (Quelle)
In diesem Artikel werden wir untersuchen, warum die Erkennung kleiner Objekte schwierig ist und wie YOLO11 sie erleichtern kann. Fangen wir an!
Link to this sectionWas ist die Erkennung kleiner Objekte und warum ist sie wichtig?#
Die Erkennung kleiner Objekte ist eine Aufgabe in der Computer Vision, einem Teilbereich der KI, die sich auf das Identifizieren und Lokalisieren von Objekten konzentriert, die nur einen sehr kleinen Teil eines Bildes einnehmen. Diese Objekte werden im Bild oft durch eine begrenzte Anzahl an Pixeln repräsentiert, den kleinsten Einheiten eines digitalen Bildes. Dies macht sie schwieriger zu erkennen als größere und deutlichere Ziele (die oft mehr Pixel enthalten).
Beispielsweise können Fahrzeuge in Luftaufnahmen, Werkzeuge in einer Fabrikhalle oder Personen auf Weitwinkel-Überwachungskameras als kleine Objekte im Bild erscheinen. Ihre Erkennung ist wichtig, da sie oft kritische Informationen enthalten, und viele reale Anwendungen, wie z. B. Überwachungssysteme, für eine korrekte Funktion auf diese Erkennungen angewiesen sind.
Wenn kleine Objekte übersehen werden, kann dies die Systemleistung und Entscheidungsfindung beeinträchtigen. Die Überwachung mittels unbemannter Luftfahrzeuge (UAV) ist ein gutes Beispiel: Das Übersehen eines kleinen, sich bewegenden Objekts am Boden kann die Genauigkeit der Navigation oder Verfolgung beeinflussen.
Link to this sectionHerausforderungen bei der Erkennung kleiner Objekte#
Frühere Systeme nutzten manuell entwickelte Merkmale und klassische Computer-Vision-Methoden, die in belebten oder abwechslungsreichen Szenen Schwierigkeiten hatten. Auch heute, wo Deep-Learning-Modelle deutlich bessere Ergebnisse liefern, ist die Erkennung kleiner Ziele immer noch schwierig, wenn sie nur einen winzigen Teil des Bildes einnehmen.
Als Nächstes betrachten wir einige der häufigen Herausforderungen, die in verschiedenen realen Szenarien bei der Erkennung kleiner Objekte auftreten.
Link to this sectionGröße, Pixel und Informationsverlust#
Kleine Objekte enthalten sehr wenige Pixel, was die Menge an visuellen Details begrenzt, die ein Modell während Phasen wie der Merkmalsextraktion lernen kann. Infolgedessen sind Muster wie Kanten, Formen und Texturen schwieriger zu erkennen, wodurch kleine Objekte eher mit dem Hintergrund verschmelzen.
Während Bilder durch convolutional layers eines neuronalen Netzwerks wandern, werden die visuellen Informationen in den Pixeln allmählich in Feature Maps komprimiert. Dies hilft dem Modell, effizient zu bleiben, bedeutet aber auch, dass feine Details verblassen.
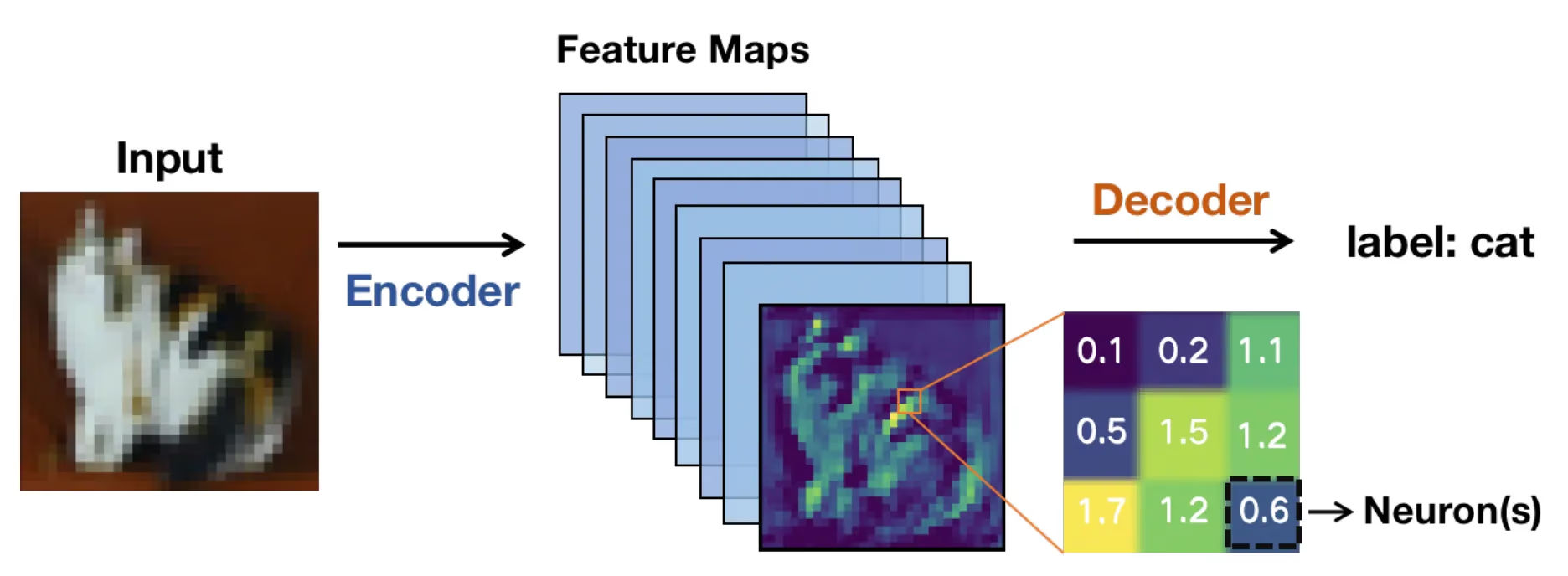
Abb. 2. Feature Maps stellen visuelle Muster in einem Bild dar (Quelle)
Bei kleinen Zielen können wichtige Hinweise verschwinden, bevor das Erkennungsnetzwerk reagieren kann. Wenn das passiert, wird die Lokalisierung unzuverlässiger, und Bounding Boxes können sich verschieben, überlappen oder die Zielobjekte ganz verfehlen.
Link to this sectionVerdeckung, Skalenvarianz und Kontext#
Größenbedingte Herausforderungen entstehen oft auch durch Verdeckung (Occlusion). Verdeckungen treten auf, wenn Objekte, insbesondere kleinere, teilweise von anderen Objekten in der Szene verdeckt werden.
Dies reduziert den sichtbaren Bereich eines Ziels, was die dem Objektdetektor zur Verfügung stehenden Informationen begrenzt. Selbst eine kleine Verdeckung kann Erkennungsnetzwerke verwirren, insbesondere in Kombination mit niedrig aufgelösten Eingaben. Ein interessantes Beispiel hierfür sind UAV-Datensätze wie VisDrone, bei denen Fußgänger, Fahrräder oder Fahrzeuge teilweise von Gebäuden, Bäumen oder anderen sich bewegenden Objekten blockiert werden können.
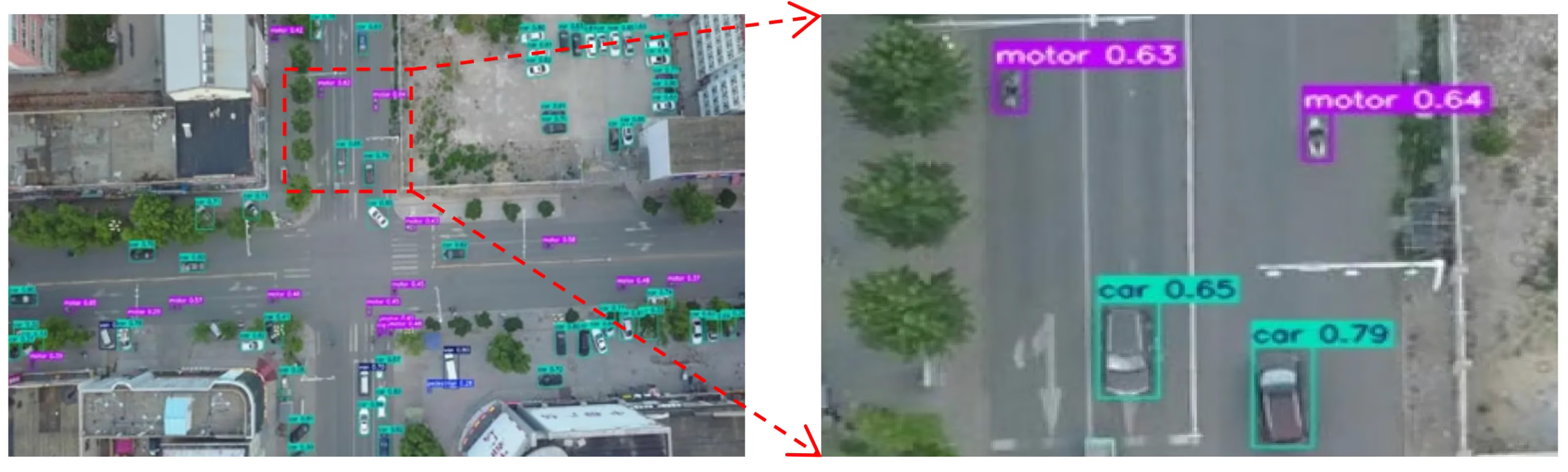
Abb. 3. Ein Beispiel aus dem VisDrone-Datensatz, das kleine Objekte zeigt (Quelle)
Ähnlich führt Skalenvarianz zu einer weiteren Schwierigkeit, wenn dasselbe Objekt je nach Entfernung und Kameraposition sehr klein oder relativ groß erscheint. Trotz dieser Hürden müssen Erkennungsalgorithmen diese kleinen Objekte über verschiedene Skalen hinweg erkennen, ohne an Genauigkeit einzubüßen.
Kontext spielt ebenfalls eine wichtige Rolle bei der Erkennung. Große Objekte erscheinen beispielsweise meist mit einer klaren Umgebung, die hilfreiche visuelle Hinweise liefert. Kleine Ziele hingegen verfügen oft nicht über diese Kontextinformationen, was die Mustererkennung erschwert.
Link to this sectionDas Problem der versteckten Metriken bei der Erkennung kleiner Objekte#
Gängige Bewertungsmetriken wie Intersection over Union (IoU) messen, wie gut eine vorhergesagte Bounding Box mit der Ground-Truth-Box überlappt. Während IoU für größere Objekte gut funktioniert, verhält es sich bei kleinen Objekten ganz anders.
Kleine Objekte nehmen nur wenige Pixel ein, daher kann schon eine geringfügige Verschiebung der vorhergesagten Box einen großen proportionalen Fehler erzeugen und den IoU-Score drastisch senken. Das bedeutet, dass kleine Objekte oft die standardmäßige IoU-Schwelle nicht erreichen, die verwendet wird, um eine Vorhersage als korrekt zu werten, selbst wenn das Objekt im Bild sichtbar ist.
Infolgedessen werden Lokalisierungsfehler eher als falsch-positive oder falsch-negative Ergebnisse klassifiziert. Diese Einschränkungen haben Forscher dazu veranlasst, zu überdenken, wie Objekterkennungssysteme kleine, schwer zu erkennende Ziele bewerten und handhaben.
Link to this sectionMulti-Skalen-Merkmale: Der Schlüssel zur Echtzeit-Erkennung kleiner Objekte#
Während Forscher daran arbeiteten, die Erkennung kleiner Objekte zu verbessern, wurde deutlich, dass die Bewahrung und Repräsentation visueller Informationen über mehrere Skalen hinweg wesentlich ist. Diese Erkenntnis spiegelt sich in aktuellen arXiv-Forschungen und in Beiträgen bei Konferenzen wie den IEEE International Conferences und der European Computer Vision Association (ECCV) wider.
Wenn Bilder tiefer in ein neuronales Netzwerk eindringen, können kleine Objekte Details verlieren oder ganz verschwinden. Deshalb legen moderne Computer-Vision-Modelle wie YOLO11 einen starken Fokus auf eine bessere Merkmalsextraktion. Gehen wir als Nächstes die Kernkonzepte hinter Feature Maps und Feature Pyramid Networks durch, um sie besser zu verstehen.
Link to this sectionFeature Maps und Skalenrepräsentation#
Wenn ein Eingabebild, wie etwa ein Fernerkundungsbild, in ein neuronales Netzwerk eintritt, wird es allmählich in Feature Maps umgewandelt. Dabei handelt es sich um vereinfachte Darstellungen des Bildes, die visuelle Muster wie Kanten, Formen und Texturen hervorheben.
Je tiefer das Netzwerk geht, desto kleiner werden diese Feature Maps in ihrer räumlichen Ausdehnung. Diese Reduzierung hilft dem Modell, effizient zu arbeiten und sich auf Informationen auf hoher Ebene zu konzentrieren. Die Verkleinerung und tiefen Feature Maps reduzieren jedoch auch die räumlichen Details.
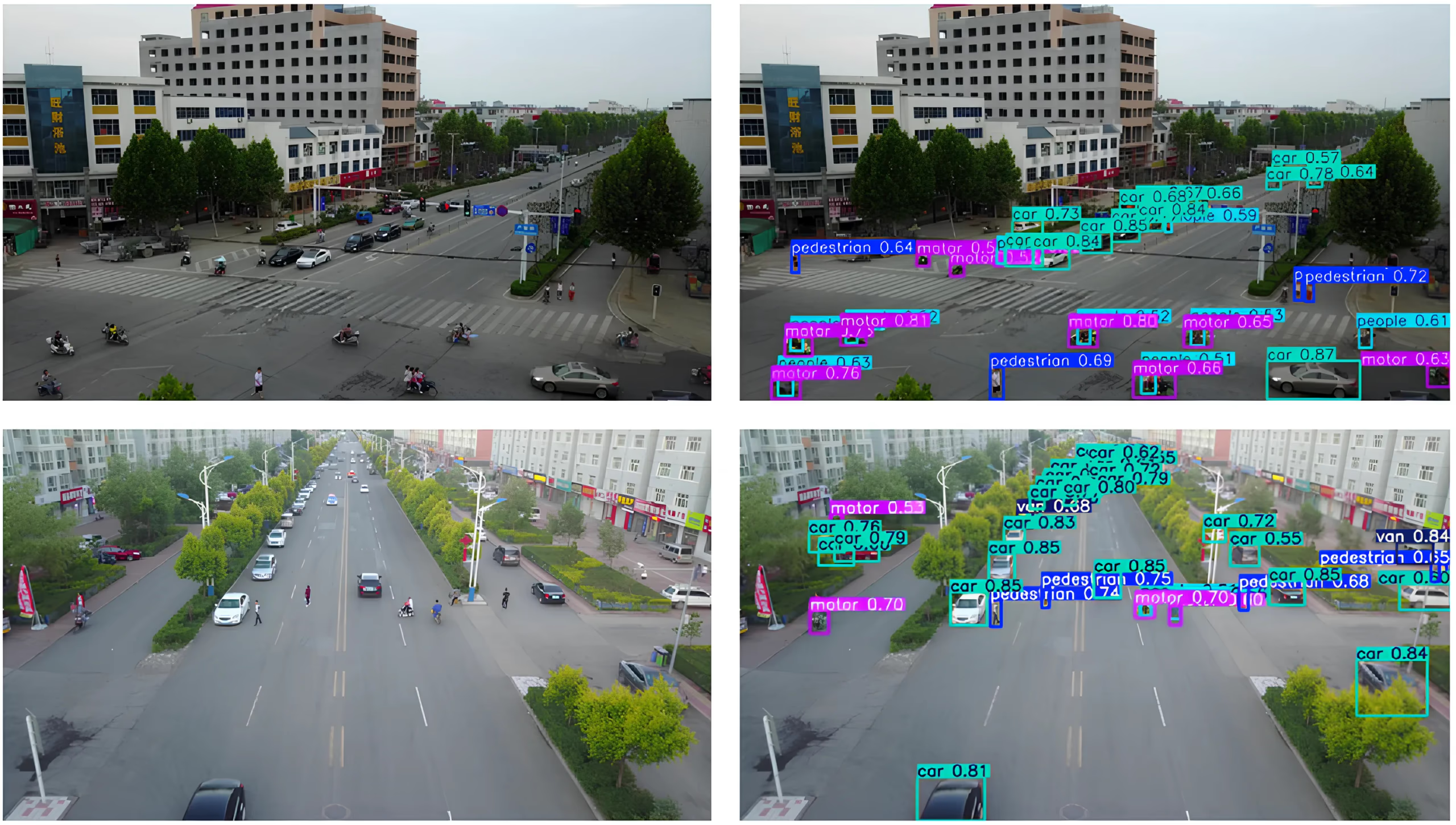
Abb. 4. Merkmalsextraktion ist der Schlüssel zur Erkennung kleiner Objekte. (Quelle)
Während große Objekte genug visuelle Informationen für eine genaue Erkennung behalten, können kleine Ziele nach nur wenigen Netzwerkschichten kritische Details verlieren. Wenn dies geschieht, kann ein Modell Schwierigkeiten haben, überhaupt zu erkennen, dass ein kleines Objekt existiert. Dies ist einer der Hauptgründe, warum kleine Objekte in Deep-Learning-Objekterkennungsmodellen übersehen werden.
Link to this sectionFeature Pyramid Networks und Multi-Skalen-Lernen#
Feature Pyramid Networks, oft FPN genannt, wurden eingeführt, um den Verlust räumlicher Details auszugleichen. Sie fungieren als unterstützendes Modul, das Informationen aus mehreren Ebenen kombiniert, damit Modelle kleine Objekte effektiver erkennen können. Dieser Prozess wird auch als Feature Aggregation und Feature Fusion bezeichnet.
Flache Schichten liefern feine räumliche Details, während tiefere Schichten semantischen Kontext hinzufügen, was ein effektives Multi-Skalen-Lernen ermöglicht. Im Gegensatz zum naiven Upsampling, das Feature Maps einfach vergrößert, bewahrt FPN bedeutungsvolle Informationen und verbessert die Erkennung kleiner Objekte.
Moderne Ansätze bauen auf dieser Idee auf, indem sie adaptive Feature Fusion und kontextbewusste Designs verwenden, um die Erkennung kleiner Ziele weiter zu verbessern. Mit anderen Worten: FPN hilft Modellen, sowohl das große Ganze als auch die winzigen Details gleichzeitig zu sehen. Diese Optimierung ist bei kleinen Objekten unerlässlich.
Link to this sectionWie sich Objekterkennungsmodelle zur Handhabung kleiner Objekte entwickelt haben#
Hier ist ein Einblick, wie sich Objekterkennungsmodelle im Laufe der Zeit entwickelt und verbessert haben, um Objekte unterschiedlicher Größe besser zu erkennen, einschließlich sehr kleiner:
- Frühe Erkennungsmethoden: Frühe Ansätze zur Objekterkennung stützten sich auf manuell entwickelte Merkmale und regelbasierte Algorithmen, die in der klassischen Bildverarbeitung verwurzelt waren. Da diese Merkmale fest definiert waren, verschlechterte sich die Leistung bei unterschiedlichen Bildern.
- Einführung von Machine Learning und Deep Learning: Die Einführung von Machine Learning und Deep Learning markierte einen bedeutenden Wandel in der Forschung zur Objekterkennung. Anstatt sich auf vordefinierte Regeln zu verlassen, lernten neuronale Netzwerke visuelle Repräsentationen direkt aus Trainingsdaten, was die Anpassungsfähigkeit an unterschiedliche Objektgrößen und Szenen verbesserte.
- Convolutional Networks: Diese neuronalen Netzwerke lernen, Muster in Bildern zu erkennen. Jede Schicht nimmt unterschiedliche Details auf, beginnend mit einfachen Kanten und Farben, dann Formen und schließlich vollständige Objekte, was sie für moderne Computer Vision unerlässlich macht.
- Two-Stage-Objektdetektoren: Two-Stage-Detektoren wie Faster R-CNN, eingeführt von Girshick und Ren, generierten zunächst Kandidatenregionen und klassifizierten diese dann. Dieser Ansatz verbesserte die Genauigkeit bei kleinen Objekten, erhöhte jedoch die Rechenkosten und verringerte die Echtzeit-Leistung.
- One-Stage-Objektdetektoren: One-Stage-Detektoren wie SSD (Single-Shot Detector) und die YOLO (You Only Look Once)-Familie, einschließlich YOLOv3, Ultralytics YOLOv5 und später Ultralytics YOLOv8, führen die Erkennung in einem einzigen Durchgang durch. Dieses Design verbessert die Inferenzgeschwindigkeit erheblich, während gleichzeitig eine wettbewerbsfähige Genauigkeit beibehalten wird.
- Neueste State-of-the-Art-Modelle: Neuere Objekterkennungsmodelle legen einen stärkeren Fokus auf Echtzeit-Leistung und Edge-Deployment. Kürzlich veröffentlichte Ultralytics YOLO-Modelle, wie Ultralytics YOLO11 und das kommende Ultralytics YOLO26, sind darauf ausgelegt, hohe Genauigkeit mit Inferenz mit niedriger Latenz in Einklang zu bringen, was sie für die Erkennung von Objekten aller Größen, einschließlich kleiner Ziele, auf Geräten mit begrenzter Rechenleistung gut geeignet macht.
Link to this sectionVerwendung von YOLO11 für Anwendungsfälle der Erkennung kleiner Objekte#
Nachdem wir nun ein besseres Verständnis davon haben, wie die Erkennung kleiner Objekte funktioniert, schauen wir uns einige reale Anwendungen an, bei denen YOLO11 eingesetzt werden kann.
Link to this sectionUAV und Luftbildfotografie#
Stell dir eine Drohne vor, die hoch über einer belebten Stadtstraße fliegt. Aus dieser Höhe schrumpfen Autos, Fahrräder und sogar Menschen auf dem Bildschirm zu nur wenigen Pixeln zusammen.
UAV- und Luftbildmodule erfassen oft Szenen wie diese, in denen interessante Objekte winzig sind und von unübersichtlichen Hintergründen umgeben sind, was sie für Computer-Vision-Modelle schwer erkennbar macht.
In solchen Szenarien kann YOLO11 eine ideale Modellwahl sein. Zum Beispiel könnte eine Drohne, die mit einem Modell wie YOLO11 ausgestattet ist, den Verkehr in Echtzeit überwachen und Fahrzeuge, Radfahrer und Fußgänger erkennen, während sie sich durch die Szene bewegen, selbst wenn jedes Objekt nur einen kleinen Teil des Bildes einnimmt. Dies ermöglicht eine schnellere Entscheidungsfindung und genauere Erkenntnisse in Anwendungen wie Verkehrsmanagement, öffentlicher Sicherheit oder Stadtplanung.
Link to this sectionRobotik und Automatisierung#
Roboter werden oft in Umgebungen eingesetzt, in denen Genauigkeit und Timing entscheidend sind. In Bereichen wie Lagerhäusern, Fabriken und auf Feldern muss ein Roboter möglicherweise sehr kleine Objekte erkennen, wie z. B. ein Teil an einem Fließband, ein Etikett auf einem Paket oder eine kleine Pflanzenknospe auf einem Feld, und schnell reagieren.
Die Erkennung von Objekten dieser Größe kann kompliziert sein, insbesondere wenn sie im Kamerabild nur als wenige Pixel erscheinen oder teilweise von anderen Objekten verdeckt werden. Das Übersehen dieser kleinen Details kann die Automatisierung verlangsamen oder die Fähigkeit des Roboters beeinträchtigen, eine Aufgabe zu erfüllen.
YOLO11 kann in diesen Situationen einen Unterschied machen. Seine verbesserte Merkmalsextraktion und schnelle Inferenz ermöglichen es Robotern, kleine Objekte in Echtzeit zu erkennen und sofort zu handeln.
YOLO11 unterstützt auch die Instanzsegmentierung, die Robotern helfen kann, Objektgrenzen und Greifpunkte präziser zu verstehen, anstatt nur allgemeine Bounding Boxes zu lokalisieren. Zum Beispiel könnte ein Roboterarm mit integriertem YOLO11 kleine Komponenten auf einem Förderband erkennen, ihre genaue Form segmentieren und sie aufgreifen, bevor sie außer Reichweite geraten, was dem System hilft, effizient und zuverlässig zu bleiben.
Link to this sectionWas macht YOLO11 effektiv für die Erkennung kleiner Objekte?#
Bei der Vielzahl an Computer-Vision-Modellen, die heute verfügbar sind, fragst du dich vielleicht, was Ultralytics YOLO11 auszeichnet.
Hier sind ein paar Gründe, warum Ultralytics YOLO11 eine großartige Option für Anwendungen ist, bei denen kleine Objekte erkannt werden müssen:
- Bessere Merkmalsextraktion: YOLO11 verwendet eine verbesserte Backbone- und Neck-Architektur, um die Merkmalsextraktion zu optimieren und eine präzisere Objekterkennung zu ermöglichen.
- Ökosystem und Benutzerfreundlichkeit: Das Ultralytics Python-Paket ist eine Bibliothek, die integrierte Funktionen zum Laden, Trainieren, Validieren und Bereitstellen von Modellen wie YOLO11 bietet. Da diese Arbeitsabläufe nur wenige Zeilen Code erfordern, können Teams schnell experimentieren und Modelle für die Erkennung kleiner Objekte feinabstimmen.
- Optimiert für Edge-Deployment: YOLO11 kann effizient auf Edge-Geräten wie NVIDIA Jetson, Raspberry Pi und industriellen Kamerasystemen ausgeführt werden. Einfach ausgedrückt ermöglicht es Vision AI-Aufgaben in Echtzeit direkt auf dem Gerät.
Link to this sectionPraktische Strategien für die Erkennung kleiner Objekte mit YOLO11#
Zusätzlich zur Verwendung eines Modells wie YOLO11 können die Art und Weise, wie du deine Annotationen vorbereitest, der gesamte Datensatz und der Trainingsprozess des Modells einen erheblichen Unterschied in der Erkennungsleistung ausmachen.
Hier ist ein kurzer Überblick darüber, worauf du dich konzentrieren solltest:
- Richtige Datenerweiterung: Leichte Datenerweiterung (Augmentierung), wie Skalieren oder Zuschneiden, kann dem Modell helfen, auf neuen Bildern besser zu verallgemeinern. Aggressive, großflächige Erweiterungen können jedoch kleine Objekte verzerren oder entfernen, wodurch das Modell sie schwerer erlernen kann.
- Überprüfung von Fehlerfällen: Die Analyse der Fälle, in denen das Modell Objekte übersieht oder falsch identifiziert, hilft dabei, eine Basis zu schaffen und aufzudecken, ob die Probleme im Datensatz liegen, Informationen bei der Merkmalsextraktion verloren gehen oder ob Trainingseinstellungen angepasst werden müssen.
- Datensatzkomposition: Dein Datensatz sollte genügend Beispiele für kleine Objekte enthalten, damit das Modell sinnvolle Muster lernen kann, und er sollte ausgewogen bleiben, damit größere Objekte die kleineren während des Trainings nicht überlagern.
Link to this sectionWichtige Erkenntnisse#
Die Erkennung kleiner Objekte ist schwierig, da kleine Ziele Details verlieren, während Bilder ein Computer-Vision-Modell durchlaufen. YOLO11 verbessert die Bewahrung dieser Details und macht die Erkennung kleiner Objekte zuverlässiger, ohne die Echtzeit-Leistung zu opfern. Dieses Gleichgewicht ermöglicht es YOLO11, eine genaue und effiziente Erkennung in realen Anwendungen zu unterstützen.
Werde Teil unserer wachsenden Community! Erkunde unser GitHub-Repository, um mehr über KI zu erfahren. Entdecke Innovationen wie Computer Vision im Einzelhandel und KI in der Automobilindustrie, indem du unsere Lösungsseiten besuchst. Um noch heute mit Computer Vision zu bauen, schau dir unsere Lizenzoptionen an.






