O impacto do design mais rápido e focado na edge do Ultralytics YOLO26
Vê como o Ultralytics YOLO26 é mais rápido na edge e por que isso importa para aplicações de visão computacional de próxima geração que exigem baixa latência e eficiência.
No início desta semana, a Ultralytics lançou oficialmente o Ultralytics YOLO26, um modelo YOLO mais rápido, leve e menor, que visa redefinir o desempenho de sistemas de visão computacional na edge. O YOLO26 suporta as mesmas tarefas principais de visão que os modelos YOLO anteriores, incluindo detecção de objetos e segmentação de instâncias.

Fig 1. Um exemplo do uso do YOLO26 para segmentar um objeto.
A diferença marcante entre o YOLO26 e os modelos anteriores é o ambiente no qual ele foi projetado para operar. Em vez de otimizar principalmente para unidades de processamento gráfico (GPUs) em nuvem ou desempenho baseado em benchmarks, o YOLO26 foi desenvolvido desde o início para implantação no mundo real em dispositivos de edge e hardware embarcado.
À medida que a visão computacional avança da pesquisa para a produção, a realidade das restrições de desempenho torna-se mais clara. Ambientes de edge são moldados por orçamentos de latência apertados, memória limitada, energia, restrições térmicas e a necessidade de comportamento previsível em diversas plataformas.
Nesses cenários, o desempenho geral do sistema depende não apenas da velocidade bruta de inferência, mas também de quão eficientemente todo o pipeline opera. Sobrecarga de pós-processamento, pressão de memória e caminhos de execução específicos de plataforma são frequentemente os gargalos.
O YOLO26 aborda esses desafios adotando uma abordagem mais rápida e focada na edge, que analisa todo o pipeline de inferência em vez de métricas de modelo individuais. Ao focar na otimização de edge, simplificar o pipeline de inferência e remover etapas de pós-processamento desnecessárias, o YOLO26 entrega melhorias de velocidade que resultam em menor latência e comportamento mais confiável em produção.
Neste artigo, exploraremos como as escolhas arquiteturais do YOLO26 se traduzem em melhorias de desempenho no mundo real, e por que ser mais rápido na edge muda fundamentalmente o que é possível para aplicações de visão computacional de próxima geração.
Link to this sectionA realidade da implantação na edge#
Executar modelos de visão computacional na edge é muito diferente de executá-los na nuvem. Em ambientes de nuvem, os sistemas normalmente têm acesso a GPUs potentes, grandes quantidades de memória e hardware estável. Na edge, essas mesmas suposições não se aplicam.
A maioria das implantações de edge roda em diversas arquiteturas de hardware, não em GPUs. Dispositivos normalmente usam múltiplos processadores especializados para diferentes tarefas, os quais são otimizados para eficiência e baixo consumo de energia, em vez da capacidade bruta de computação de GPUs de nuvem.
A latência é outra grande restrição. Sistemas de edge operam frequentemente sob limites rígidos de tempo real, onde até pequenos atrasos podem afetar a capacidade de resposta ou a segurança. Nesses casos, a latência de ponta a ponta importa mais do que a velocidade bruta de inferência. Um modelo pode ser rápido no papel, mas ainda falhar quando o pós-processamento e a movimentação de dados são adicionados.
A memória também desempenha um papel importante. Muitos dispositivos de edge possuem memória limitada e caches compartilhados. Grandes tensores intermediários e o uso ineficiente de memória podem tornar os sistemas lentos, mesmo quando o modelo em si é eficiente.
Limites de energia e térmicos adicionam restrições extras. Dispositivos de edge frequentemente operam sem resfriamento ativo e dentro de orçamentos de energia fixos. O desempenho precisa ser eficiente e sustentável, não apenas rápido em rajadas curtas.
Além de tudo isso, as implantações de edge exigem consistência. Os modelos precisam se comportar da mesma forma em diferentes dispositivos e runtimes. Código específico de plataforma ou etapas complexas de pós-processamento podem introduzir diferenças sutis que tornam os sistemas mais difíceis de implantar e manter.
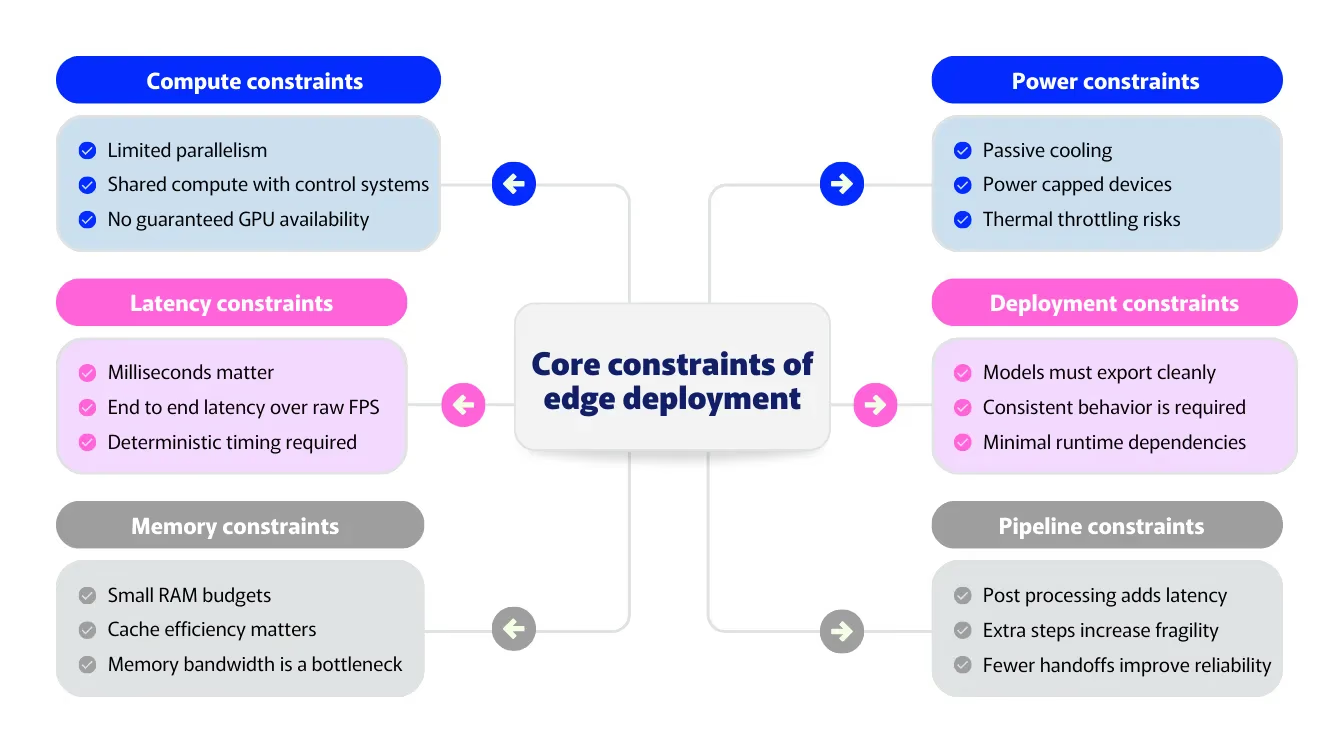
Fig 2. Um olhar sobre as restrições da implantação na edge. Imagem do autor.
Essas restrições definem o que o desempenho realmente significa na edge. Em outras palavras, o desempenho é definido por todo o pipeline, não por uma única métrica.
Link to this sectionPor que a visão na edge exige um modelo de desempenho diferente#
Então, como as restrições da implantação na edge estão relacionadas aos requisitos de um modelo de visão computacional construído para a edge? A conexão torna-se clara assim que os modelos saem dos ambientes de pesquisa para sistemas do mundo real.
Em ambientes de nuvem, o desempenho é frequentemente medido usando benchmarks como velocidade de inferência e precisão. Na edge, essas métricas contam apenas parte da história. Sistemas de visão operam tipicamente em hardware heterogêneo, onde a inferência da rede neural é delegada a aceleradores especializados enquanto outras partes do pipeline rodam em processadores de uso geral.
Neste contexto, a velocidade do modelo não é suficiente. Como todo o sistema performa assim que o modelo é implantado é fundamental. Um modelo pode parecer rápido por si só, mas ainda falhar se o pós-processamento, a movimentação de dados ou as etapas específicas de plataforma adicionarem sobrecarga.
É por isso que a visão na edge exige um modelo de desempenho que foque na eficiência em nível de sistema, em vez de benchmarks isolados. O YOLO26 reflete essa mudança ao focar na otimização de edge, inferência otimizada e execução de ponta a ponta criada para implantação no mundo real.
Link to this sectionA fundação para velocidade: Um design focado na edge#
Na edge, o desempenho é definido por quão bem um modelo se adapta à arquitetura real de hardware do dispositivo. Projetar para a edge primeiro garante que os sistemas de visão operem de forma confiável em plataformas reais, independentemente da combinação específica de unidades de processamento disponíveis.
Uma abordagem focada na edge prioriza a execução previsível e eficiente em hardware heterogêneo, em vez de adaptar modelos que foram otimizados para GPUs de nuvem após o fato. Simplificando, isso significa favorecer operações que se traduzem bem para aceleradores de rede neural, minimizando o trabalho não neural fora do modelo e reduzindo a complexidade desnecessária que pode tornar a execução de ponta a ponta lenta.
O YOLO26 foi projetado com essas restrições em mente. Sua arquitetura foca em desempenho consistente em vez de pico de throughput sob condições ideais. Ao simplificar os caminhos de execução e eliminar cálculos desnecessários, o YOLO26 reduz a sobrecarga em todo o pipeline de inferência e faz melhor uso da aceleração e hierarquia de memória disponíveis no dispositivo.
Essa abordagem também melhora a confiabilidade. A otimização focada na edge leva a um tempo mais previsível e menos picos de desempenho, o que é crítico para sistemas em tempo real. Em vez de depender de hardware especializado ou pós-processamento pesado para atingir velocidade, o YOLO26 enfatiza a eficiência em todo o pipeline de inferência.
Link to this sectionInferência de ponta a ponta e o custo do pós-processamento#
Você pode estar se perguntando o que significa eliminar etapas desnecessárias de pós-processamento. Para entender isso, vamos dar um passo atrás e observar como funcionam os sistemas tradicionais de detecção de objetos.
Em muitos pipelines de detecção de objetos, a inferência não termina quando o modelo produz suas previsões. Em vez disso, o modelo gera um grande número de bounding boxes sobrepostas, que precisam ser filtradas e refinadas antes de poderem ser usadas. Essa limpeza ocorre por meio de etapas de pós-processamento que rodam fora do próprio modelo.
Uma das etapas de pós-processamento mais comuns é a Non-Maximum Suppression, ou NMS. O NMS compara bounding boxes sobrepostas e mantém apenas as detecções mais confiantes, removendo duplicatas que se referem ao mesmo objeto. Embora essa abordagem seja eficaz, ela introduz um cálculo extra após a conclusão da inferência.
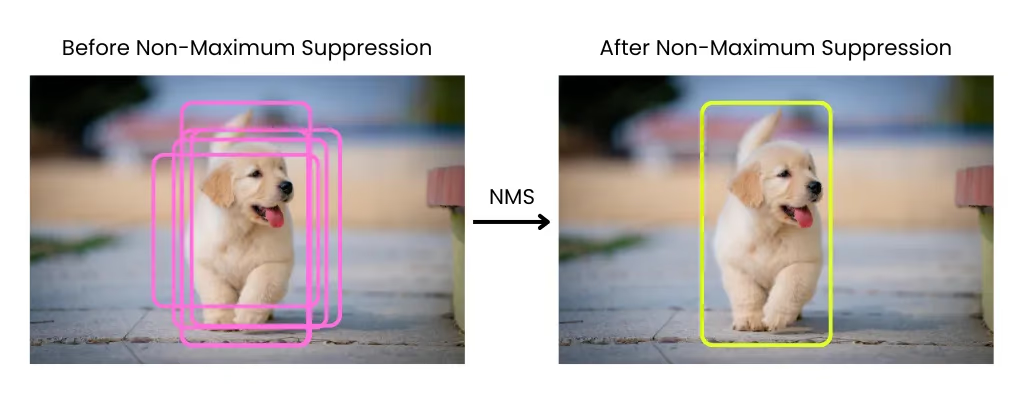
Fig 3. Entendendo o NMS. Imagem do autor.
Na edge, esse trabalho extra tem um custo. Etapas de pós-processamento como o NMS não são bem adequadas aos aceleradores especializados usados para inferência de rede neural, que são otimizados para computação neural densa em vez de operações intensivas em controle ou memória.
Como resultado, o NMS introduz latência adicional e sobrecarga de memória, e seu custo aumenta à medida que o número de detecções cresce. Mesmo quando o modelo em si é rápido, o NMS ainda pode consumir uma parcela significativa do tempo total de execução.
O pós-processamento também aumenta a complexidade do sistema. Como ele vive fora do modelo, ele precisa ser implementado separadamente para diferentes runtimes e alvos de hardware. Isso frequentemente leva a caminhos de código específicos de plataforma, comportamento inconsistente entre dispositivos e pipelines de implantação mais frágeis.
Mais importante ainda, o pós-processamento quebra a ideia de um verdadeiro desempenho de ponta a ponta. Medir a velocidade de inferência do modelo não reflete como o sistema se comporta em produção. O que importa, no final das contas, é o tempo total da entrada até a saída final, incluindo cada etapa do pipeline.
Nessas situações, o pós-processamento torna-se um gargalo oculto na edge. Ele adiciona latência, consome recursos de CPU e complica a implantação, tudo isso enquanto permanece fora do próprio modelo.
Link to this sectionComo o YOLO26 remove o NMS e por que isso o torna mais rápido#
O YOLO26 remove o NMS atacando a causa raiz das detecções duplicadas em vez de limpá-las após a inferência. Em vez de produzir muitas previsões sobrepostas que precisam ser filtradas, o modelo é treinado para gerar diretamente um conjunto menor de detecções finais e confiantes.
Isso é possível alterando a forma como as detecções são aprendidas durante o treinamento. O YOLO26 incentiva um relacionamento mais claro de um para um entre objetos e previsões, reduzindo a redundância na fonte. Como resultado, detecções duplicadas são resolvidas dentro da própria rede em vez de por meio de pós-processamento externo.
Remover o NMS tem um impacto imediato no desempenho na edge. Como o NMS não se mapeia bem para aceleradores de rede neural, eliminá-lo reduz a movimentação de memória e evita etapas de processamento não neural caras. Isso reduz a latência de ponta a ponta e torna o desempenho mais previsível, especialmente em dispositivos de edge onde o pós-processamento poderia, de outra forma, consumir uma parcela notável do tempo total de execução.
Isso também simplifica o pipeline de inferência. Com menos etapas fora do modelo, há menos movimentação de dados e menos transferências entre componentes. A saída do modelo já é o resultado final, o que torna a execução mais previsível.
Link to this sectionRemovendo o DFL para permitir um verdadeiro desempenho de ponta a ponta#
Outra inovação no YOLO26 é a remoção da Distribution Focal Loss, ou DFL, que era usada em modelos YOLO anteriores para regressão de bounding box. Em vez de prever uma única coordenada diretamente, os modelos que usam DFL aprendiam uma distribuição de valores possíveis e então derivavam uma bounding box final a partir dessa distribuição. Essa abordagem ajudou a melhorar a precisão da localização e foi um passo importante nas gerações anteriores.
Com o tempo, no entanto, a DFL também introduziu trade-offs. Prever distribuições aumenta o cálculo e adiciona complexidade à arquitetura do modelo, o que pode tornar a inferência lenta em CPUs e dificultar a exportação de modelos em diferentes formatos de implantação. A DFL também impunha intervalos de regressão fixos, o que poderia limitar a flexibilidade ao detectar objetos muito grandes.
O YOLO26 remove a DFL como parte de seu movimento em direção a um design mais simples de ponta a ponta. A regressão de bounding box é redesenhada para ser mais direta, reduzindo cálculos desnecessários enquanto mantém a precisão. Essa mudança alinha-se à abordagem sem NMS do YOLO26.
Link to this sectionDe onde vem o aumento de 43% na velocidade de inferência em CPU#
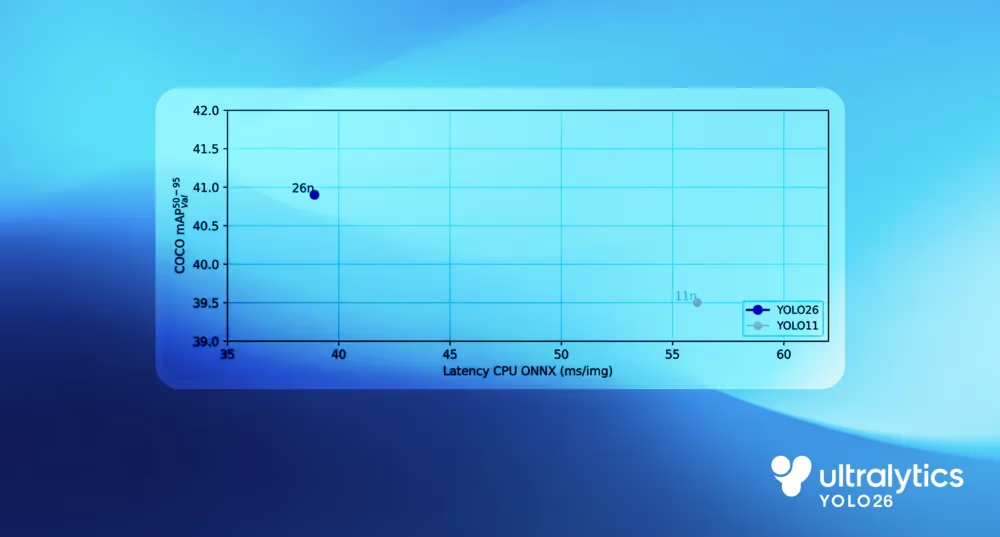
Em benchmarks baseados em CPU, o YOLO26 mostra uma clara melhoria de desempenho em relação aos modelos YOLO anteriores. Comparado ao Ultralytics YOLO11, o modelo nano do YOLO26 entrega até 43% mais velocidade de inferência em CPU, uma diferença que tem um impacto significativo em implantações de edge no mundo real.
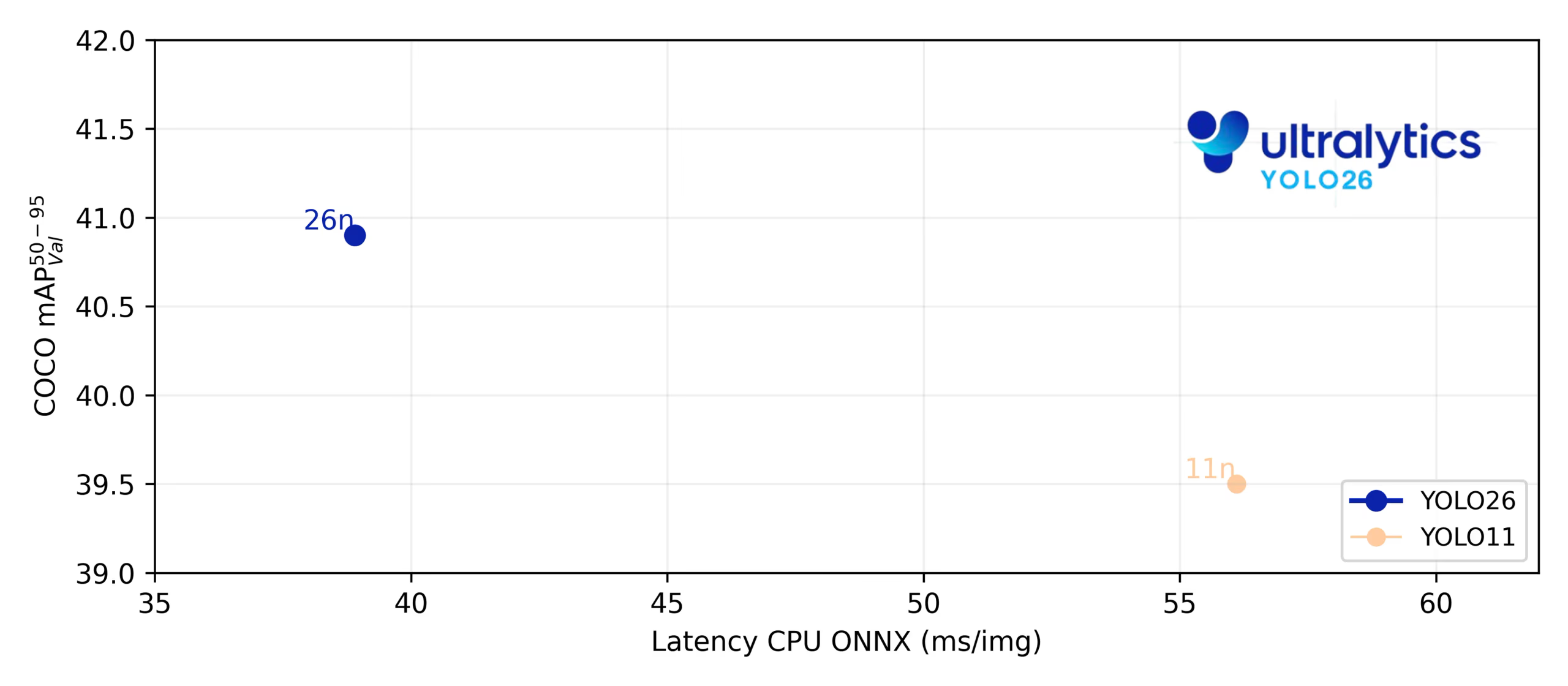
Fig 4. Benchmarking da velocidade de CPU do YOLO26.
Esse ganho vem da simplificação de todo o pipeline de inferência em vez da otimização de um único componente. A execução de ponta a ponta remove a sobrecarga de pós-processamento, um método de regressão de bounding box mais direto reduz os cálculos, e escolhas de design focadas em CPU melhoram a eficiência da execução em processadores de uso geral.
Juntas, essas mudanças reduzem a latência, diminuem a carga de trabalho da CPU e levam a um desempenho mais rápido e consistente em hardware de edge real.
Link to this sectionO impacto do YOLO26 na implantação e exportação para edge#
Os ganhos de desempenho do YOLO26 vão além de uma inferência mais rápida. Ao simplificar o modelo e reduzir a sobrecarga de memória, ele torna-se mais fácil de implantar e mais confiável para rodar em ambientes de edge.
O design de ponta a ponta do YOLO26 também simplifica a exportação. Com menos componentes auxiliares e sem etapas externas de pós-processamento, os modelos exportados são totalmente autônomos. Isso reduz dependências específicas de plataforma e ajuda a garantir um comportamento consistente entre runtimes e alvos de hardware.
Na prática, isso significa que o YOLO26 pode ser implantado com mais facilidade em dispositivos de edge, como câmeras, robôs e sistemas embarcados, usando vários formatos de exportação. O que você exporta é o que você executa, com menos etapas de integração e menor risco de desvios na implantação.
Link to this sectionA inferência rápida na edge possibilita a robótica e a visão computacional industrial#
Até aqui, vimos como o design focado na edge do YOLO26 melhora o desempenho em nível de sistema. O impacto real, no entanto, está em como ele torna a visão computacional mais fácil de integrar em aplicações do mundo real.
Por exemplo, em robótica e ambientes industriais, sistemas de visão operam frequentemente sob restrições rígidas de tempo real. Decisões precisam ser tomadas de forma rápida e consistente, usando computação limitada e sem depender de conectividade com a nuvem. Com o Ultralytics YOLO26, cumprir esses requisitos torna-se prático.
Aplicações como navegação de robôs e manipulação de objetos se beneficiam de menor latência e inferência mais previsível, permitindo que robôs respondam suavemente a mudanças em seu ambiente. Da mesma forma, em ambientes industriais, modelos de visão podem rodar diretamente em linhas de produção para detectar defeitos, rastrear componentes e monitorar processos sem introduzir atrasos ou complexidade adicional.
Ao permitir uma inferência rápida e confiável em hardware de edge, o YOLO26 ajuda a tornar a visão computacional uma parte natural da robótica e de sistemas industriais, em vez de um desafio para implantar e manter.
Link to this sectionPrincipais pontos#
O YOLO26 foi criado para a edge, onde restrições do mundo real, como latência, memória e confiabilidade, definem o que é possível. Ao projetar o modelo em torno da execução focada em CPU, inferência de ponta a ponta e implantação mais simples, o YOLO26 torna prático integrar visão computacional em sistemas reais. Essa abordagem focada na edge permite uma ampla gama de aplicações, desde robótica e visão industrial até IA embarcada e em dispositivos, onde o desempenho e a previsibilidade são o que mais importa.
Junte-se à nossa comunidade em crescimento e explore nosso repositório GitHub para recursos práticos de IA. Para construir com IA visual hoje, explore nossas opções de licenciamento. Aprenda como a IA na agricultura está transformando o campo e como a visão computacional na saúde está moldando o futuro visitando nossas páginas de soluções.






