Integrando visão computacional em robótica com Ultralytics YOLO11
Veja mais de perto como modelos de visão computacional como o Ultralytics YOLO11 estão tornando os robôs mais inteligentes e moldando o futuro da robótica.

Os robôs percorreram um longo caminho desde o Unimate, o primeiro robô industrial, inventado na década de 1950. O que começou como máquinas pré-programadas e baseadas em regras evoluiu agora para sistemas inteligentes capazes de executar tarefas complexas e interagir perfeitamente com o mundo real.
Hoje, os robôs são usados em todos os setores, desde a manufatura e saúde até a agricultura, para diversas automações de processos. Um fator chave na evolução da robótica é a IA e a visão computacional, um ramo da IA que ajuda as máquinas a compreender e interpretar informações visuais.
Por exemplo, modelos de visão computacional como o Ultralytics YOLO11 estão melhorando a inteligência dos sistemas robóticos. Quando integrados a esses sistemas, a visão por IA permite que os robôs reconheçam objetos, naveguem em ambientes e tomem decisões em tempo real.
Neste artigo, veremos como o YOLO11 pode aprimorar robôs com capacidades avançadas de visão computacional e explorar suas aplicações em diversos setores.
Link to this sectionUma visão geral da IA e visão computacional na robótica#
A funcionalidade central de um robô depende do quão bem ele compreende o que o rodeia. Essa consciência conecta seu hardware físico à tomada de decisões inteligentes. Sem ela, os robôs só conseguem seguir instruções fixas e têm dificuldade em se adaptar a ambientes em mudança ou lidar com tarefas complexas. Assim como os humanos dependem da visão para navegar, os robôs usam visão computacional para interpretar seu ambiente, entender a situação e tomar as medidas adequadas.
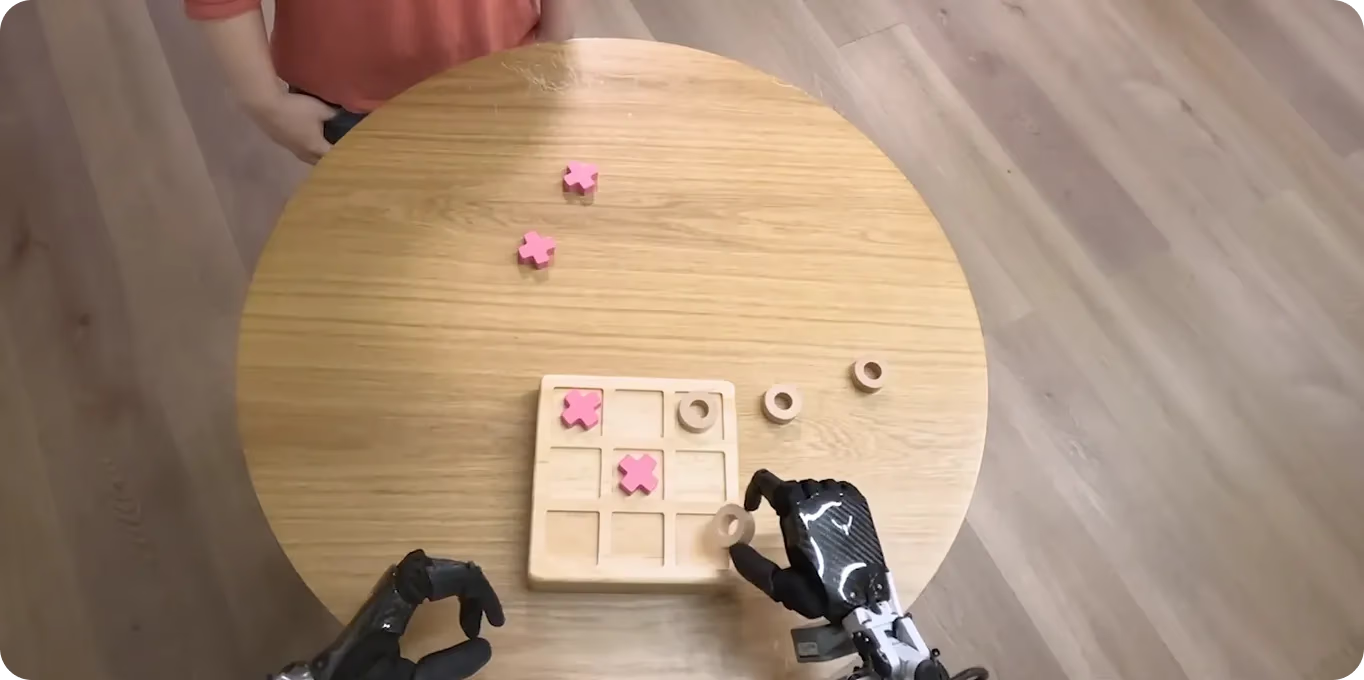
Fig 1. Um robô jogando uma partida de Jogo da Velha usando visão computacional para interpretar o tabuleiro e fazer jogadas estratégicas.
Na verdade, a visão computacional é fundamental para a maioria das tarefas robóticas. Ela ajuda os robôs a detectar objetos e evitar obstáculos enquanto se movem. No entanto, para fazer isso, ver o mundo não é suficiente; os robôs também precisam ser capazes de reagir rapidamente. Em situações do mundo real, até um pequeno atraso pode levar a erros dispendiosos. Modelos como o Ultralytics YOLO11 permitem que os robôs obtenham insights em tempo real e respondam instantaneamente, mesmo em situações complexas ou desconhecidas.
Link to this sectionConhecendo o Ultralytics YOLO11#
Antes de mergulharmos em como o YOLO11 pode ser integrado a sistemas robóticos, vamos primeiro explorar os principais recursos do YOLO11.
Modelos Ultralytics YOLO suportam várias tarefas de visão computacional que ajudam a fornecer insights rápidos e em tempo real. Em particular, o Ultralytics YOLO11 oferece desempenho mais rápido, menores custos computacionais e precisão aprimorada. Por exemplo, ele pode ser usado para detectar objetos em imagens e vídeos com alta precisão, tornando-o perfeito para aplicações em áreas como robótica, saúde e manufatura.
Aqui estão alguns recursos impactantes que tornam o YOLO11 uma ótima opção para a robótica:
- Facilidade de implantação: É fácil de implementar e integra-se perfeitamente a uma ampla gama de plataformas de software e hardware.
- Adaptabilidade: O YOLO11 funciona bem em diferentes ambientes e configurações de hardware, oferecendo desempenho consistente mesmo em condições dinâmicas.
- Fácil de usar: A documentação e a interface de fácil compreensão do YOLO11 ajudam a reduzir a curva de aprendizado, tornando simples a integração em sistemas robóticos.
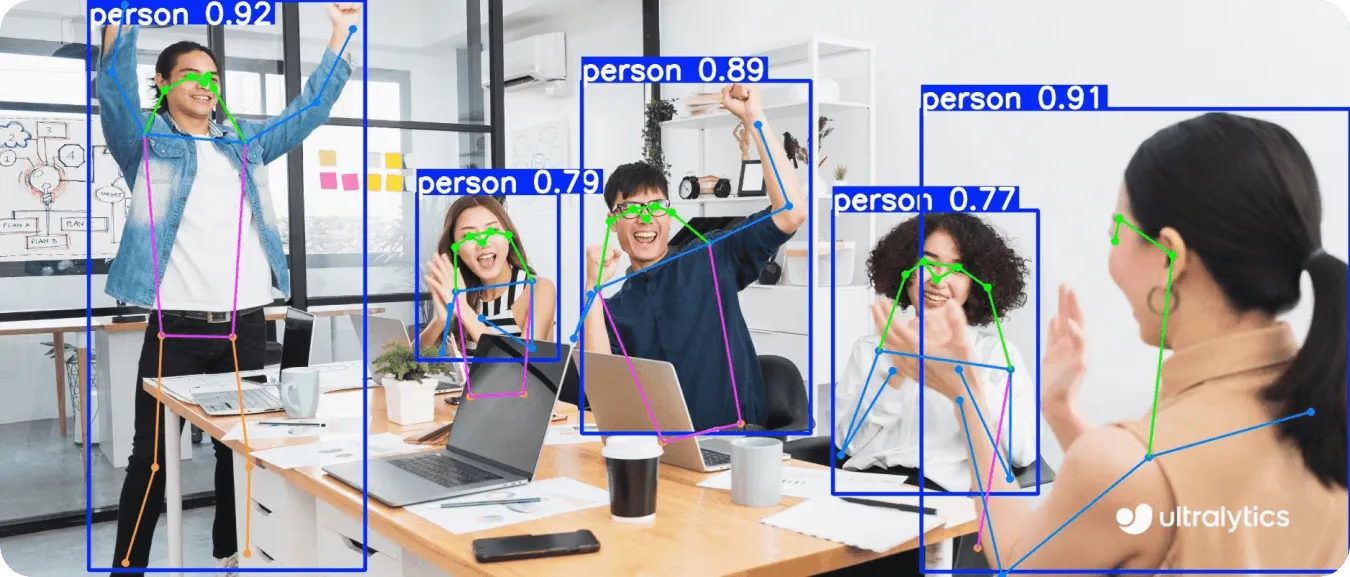
Fig 2. Um exemplo de análise da pose de pessoas em uma imagem usando o YOLO11.
Link to this sectionExplorando tarefas de visão computacional habilitadas pelo YOLO11#
Aqui está uma visão mais detalhada de algumas das tarefas de visão computacional que o YOLO11 suporta:
- Detecção de objetos: A capacidade de detecção de objetos em tempo real do YOLO11 permite que os robôs identifiquem e localizem objetos dentro de seu campo de visão instantaneamente. Isso ajuda os robôs a evitar obstáculos, realizar planejamento de trajetória dinâmico e alcançar navegação automatizada em ambientes internos e externos.
- Segmentação de instância: Ao identificar os limites exatos e as formas de objetos individuais, o YOLO11 equipa os robôs para realizar operações precisas de separação e posicionamento (pick-and-place) e tarefas complexas de montagem.
- Estimativa de pose: O suporte do YOLO11 para estimativa de pose permite que os robôs reconheçam e interpretem movimentos e gestos do corpo humano. Isso é crucial para que robôs colaborativos (cobots) trabalhem com segurança ao lado de humanos.
- Rastreamento de objetos: O YOLO11 torna possível rastrear objetos em movimento ao longo do tempo, tornando-o ideal para aplicações relacionadas à robótica autônoma que precisam monitorar seus arredores em tempo real.
- Classificação de imagem: O YOLO11 pode classificar objetos em imagens, permitindo que os robôs categorizem itens, detectem anomalias ou tomem decisões com base em tipos de objetos, como a identificação de suprimentos médicos em ambientes de saúde.
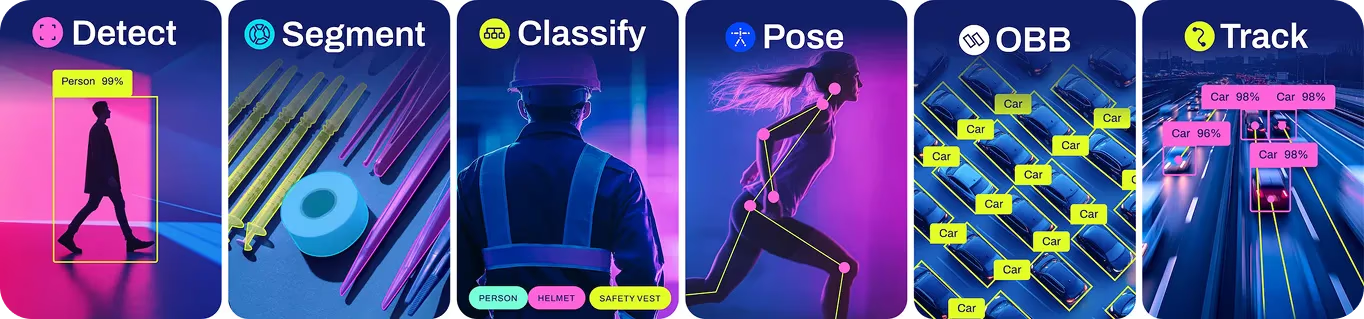
Fig 3. Tarefas de visão computacional suportadas pelo YOLO11.
Link to this sectionIA em aplicações de robótica: Impulsionada pelo YOLO11#
Do aprendizado inteligente à automação industrial, modelos como o YOLO11 podem ajudar a redefinir o que os robôs podem fazer. Sua integração na robótica demonstra como os modelos de visão computacional estão impulsionando avanços na automação. Vamos explorar alguns domínios principais onde o YOLO11 pode causar um impacto significativo.
Link to this sectionEnsinando robôs usando visão computacional#
A visão computacional é amplamente utilizada em robôs humanoides, permitindo que eles aprendam observando seu ambiente. Modelos como o YOLO11 podem ajudar a melhorar esse processo fornecendo detecção de objetos e estimativa de pose avançadas, o que ajuda os robôs a interpretar com precisão ações e comportamentos humanos.
Ao analisar movimentos e interações sutis em tempo real, os robôs podem ser treinados para replicar tarefas humanas complexas. Isso permite que eles vão além das rotinas pré-programadas e aprendam tarefas, como usar um controle remoto ou uma chave de fenda, simplesmente observando uma pessoa.
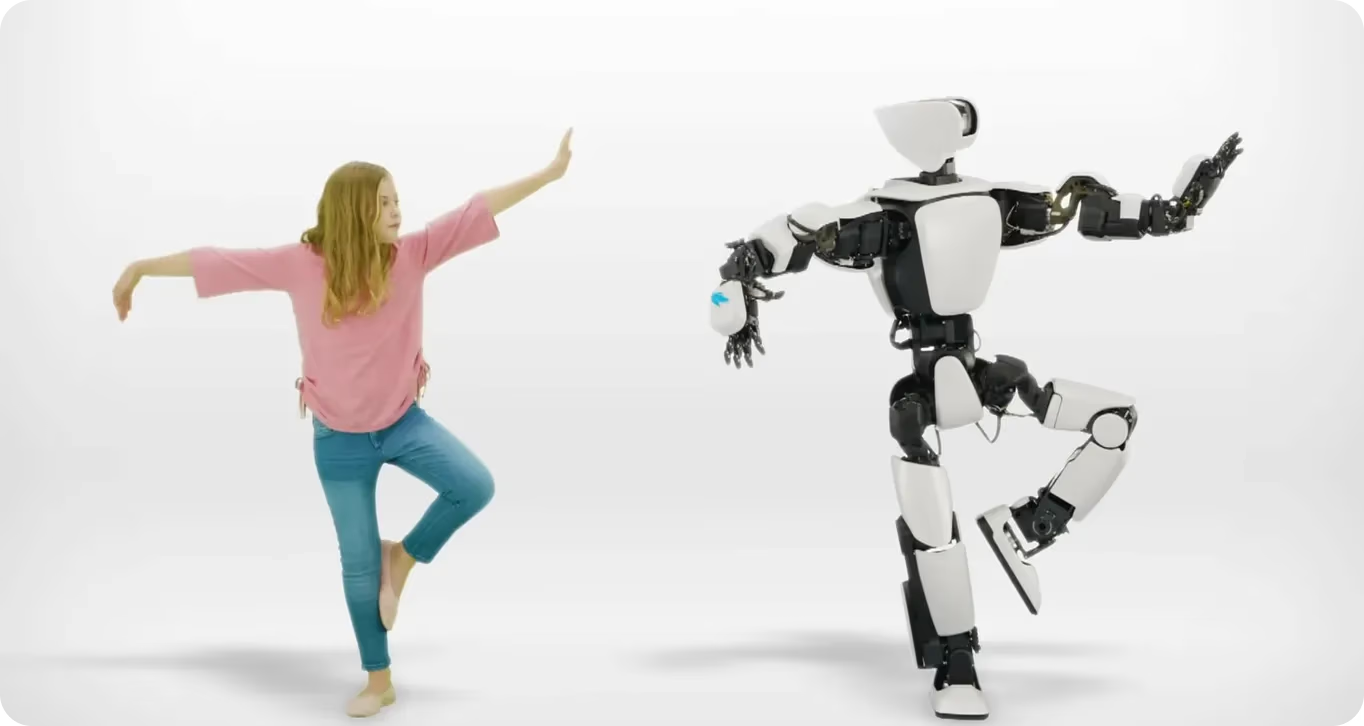
Fig 4. Um robô imitando a ação de um humano.
Esse tipo de aprendizado pode ser útil em diferentes setores. Por exemplo, na agricultura, os robôs podem observar trabalhadores humanos aprendendo tarefas como plantar, colher e gerenciar plantações. Ao copiar como os humanos realizam essas tarefas, os robôs podem se ajustar a diferentes condições agrícolas sem precisar ser programados para cada situação.
Link to this sectionAplicações relacionadas à robótica na saúde#
Da mesma forma, na saúde, a visão computacional está se tornando cada vez mais importante. Por exemplo, o YOLO11 pode ser usado em dispositivos médicos para ajudar cirurgiões em procedimentos complexos. Com recursos como detecção de objetos e segmentação de instância, o YOLO11 pode ajudar os robôs a localizar estruturas corporais internas, gerenciar instrumentos cirúrgicos e realizar movimentos precisos.
Embora isso possa parecer algo saído da ficção científica, pesquisas recentes demonstram a aplicação prática da visão computacional em procedimentos cirúrgicos. Em um estudo interessante sobre dissecção robótica autônoma para colecistectomia (remoção da vesícula biliar), os pesquisadores integraram o YOLO11 para segmentação de tecido (classificando e separando diferentes tecidos em uma imagem) e detecção de pontos-chave de instrumentos cirúrgicos (identificando marcos específicos nas ferramentas).
O sistema foi capaz de distinguir com precisão entre diferentes tipos de tecido - mesmo enquanto os tecidos se deformavam (mudavam de forma) durante o procedimento - e ajustou-se dinamicamente a essas mudanças. Isso tornou possível que os instrumentos robóticos seguissem caminhos precisos de dissecção (corte cirúrgico).
Link to this sectionManufatura inteligente e automação industrial#
Robôs que podem pegar e colocar objetos desempenham um papel fundamental na automação de operações de manufatura e na otimização de cadeias de suprimentos. Sua velocidade e precisão permitem que realizem tarefas com intervenção humana mínima, como identificar e classificar itens.
Com a segmentação de instância precisa do YOLO11, braços robóticos podem ser treinados para detectar e segmentar objetos movendo-se em uma esteira, pegá-los com precisão e colocá-los em locais designados com base em seu tipo e tamanho.
Por exemplo, fabricantes de automóveis populares estão usando robôs baseados em visão para montar diferentes peças automotivas, melhorando a velocidade e a precisão da linha de montagem. Modelos de visão computacional como o YOLO11 podem permitir que esses robôs trabalhem ao lado de trabalhadores humanos, garantindo a integração perfeita de sistemas automatizados em ambientes de produção dinâmicos. Esse avanço pode levar a tempos de produção mais rápidos, menos erros e produtos de maior qualidade.
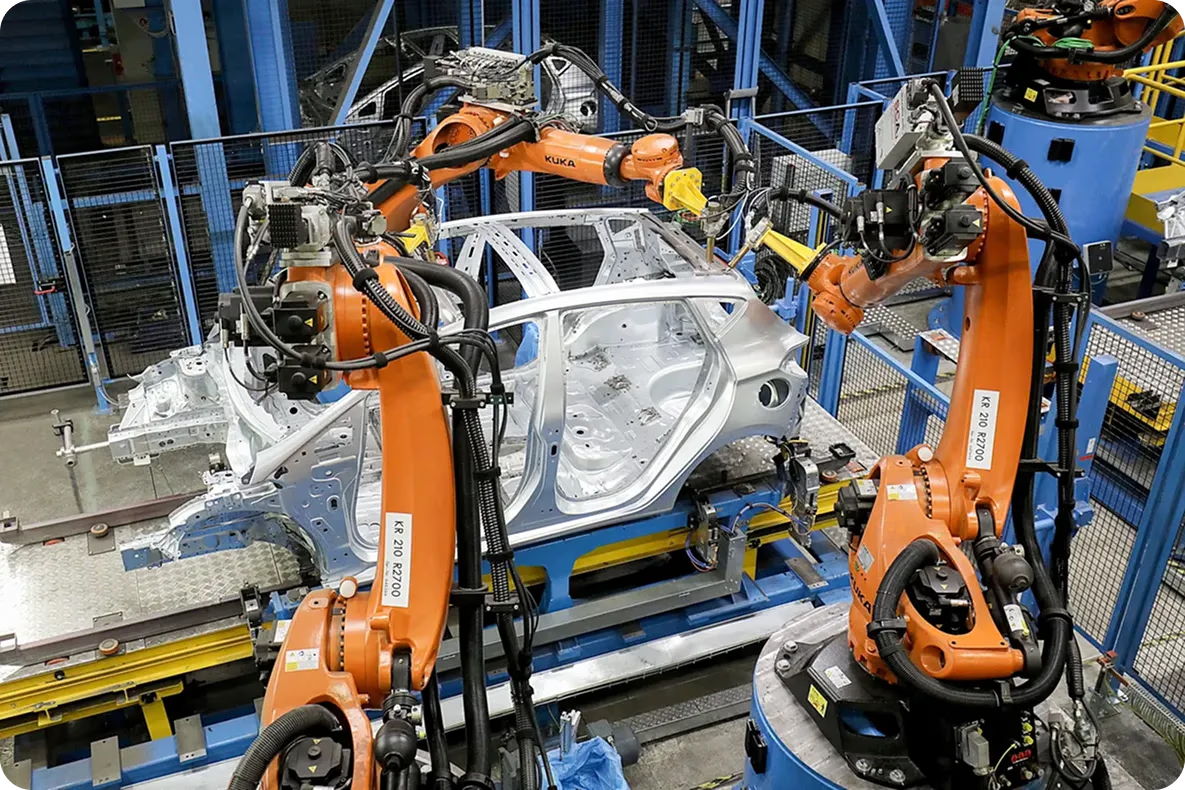
Fig 5. Um braço robótico baseado em visão montando um carro.
Link to this sectionVantagens de integrar o Ultralytics YOLO11 na robótica#
O YOLO11 oferece vários benefícios importantes que o tornam ideal para uma integração perfeita em sistemas de robótica autônoma. Aqui estão algumas das principais vantagens:
- Baixa latência de inferência: O YOLO11 pode fornecer previsões altamente precisas com baixa latência, mesmo em ambientes dinâmicos.
- Modelos leves: Projetados para otimização de desempenho, os modelos leves do YOLO11 permitem que robôs menores com menos poder de processamento tenham capacidades de visão avançadas sem sacrificar a eficiência.
- Eficiência energética: O YOLO11 foi projetado para ser eficiente em termos de energia, tornando-o ideal para robôs movidos a bateria que precisam conservar energia enquanto mantêm alto desempenho.
Link to this sectionLimitações da visão por IA na robótica#
Embora os modelos de visão computacional forneçam ferramentas poderosas para a visão robótica, há algumas limitações a considerar ao integrá-los a sistemas robóticos do mundo real. Algumas dessas limitações incluem:
- Coleta de dados cara: Treinar modelos eficazes para tarefas específicas de robôs geralmente exige conjuntos de dados grandes, diversos e bem rotulados, que são caros de adquirir.
- Variações ambientais: Os robôs operam em ambientes imprevisíveis, onde fatores como condições de iluminação ou fundos poluídos podem afetar o desempenho dos modelos de visão.
- Problemas de calibração e alinhamento: Garantir que os sistemas de visão estejam devidamente calibrados e alinhados com os outros sensores do robô é vital para um desempenho preciso, e o desalinhamento pode levar a erros na tomada de decisões.
Link to this sectionO futuro dos avanços na robótica e IA#
Sistemas de visão computacional não são apenas ferramentas para os robôs de hoje; eles são blocos de construção para um futuro onde os robôs podem operar de forma autônoma. Com suas habilidades de detecção em tempo real e suporte para múltiplas tarefas, eles são perfeitos para a próxima geração da robótica.
Na verdade, as tendências atuais do mercado mostram que a visão computacional está se tornando cada vez mais essencial na robótica. Relatórios do setor destacam que a visão computacional é a segunda tecnologia mais utilizada no mercado global de robótica com IA.
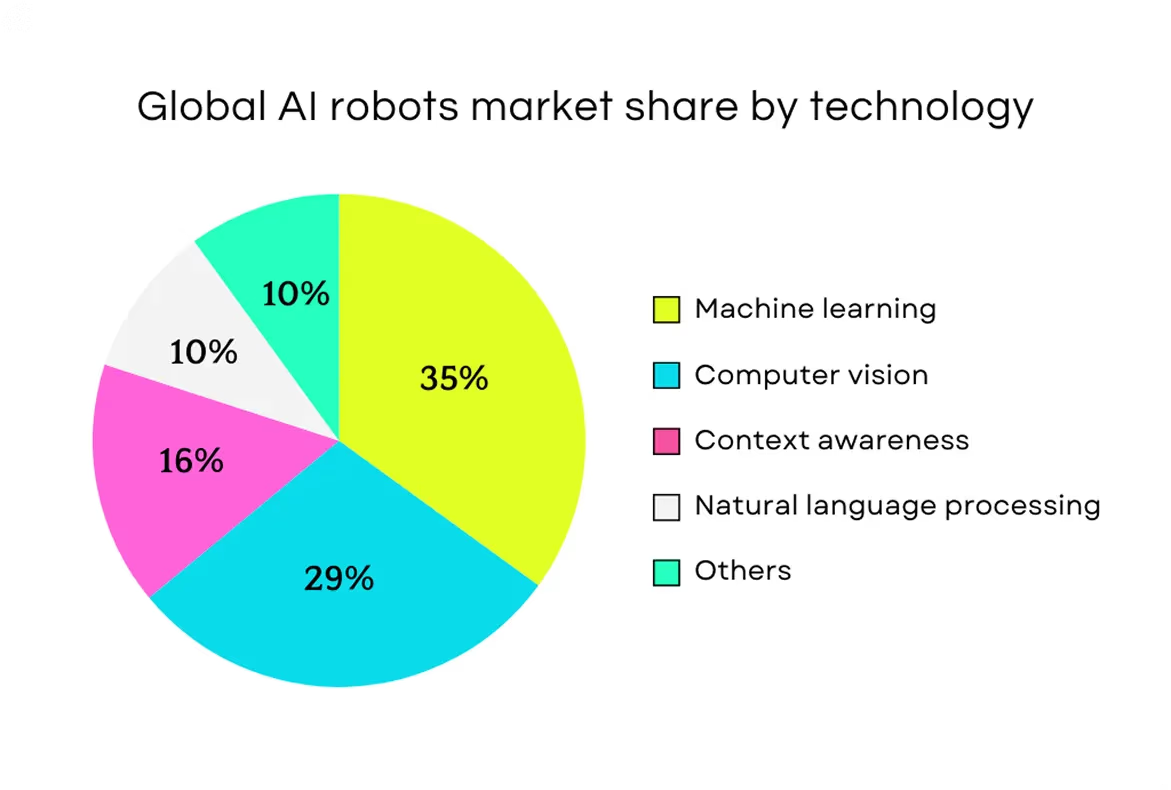
Fig 6. Participação de mercado global de robôs com IA por tecnologia.
Link to this sectionPrincipais pontos#
Com sua capacidade de processar dados visuais em tempo real, o YOLO11 pode ajudar os robôs a detectar, identificar e interagir com seu entorno com mais precisão. Isso faz uma enorme diferença em campos como a manufatura, onde robôs podem colaborar com humanos, e na saúde, onde podem auxiliar em cirurgias complexas.
À medida que a robótica continua a avançar, a integração da visão computacional em tais sistemas será crucial para permitir que os robôs lidem com uma ampla gama de tarefas de forma mais eficiente. O futuro da robótica parece promissor, com a IA e a visão computacional impulsionando máquinas ainda mais inteligentes e adaptáveis.
Junte-se à nossa comunidade e verifique nosso repositório GitHub para saber mais sobre os desenvolvimentos recentes em IA. Explore várias aplicações de IA na saúde e visão computacional na agricultura em nossas páginas de soluções. Confira nossos planos de licenciamento para criar suas próprias soluções de visão computacional.






