Melhorando a reidentificação de veículos com os modelos Ultralytics YOLO
Aprenda como os modelos Ultralytics YOLO podem desempenhar um papel em soluções de reidentificação de veículos, fornecendo detecções precisas e exatas.

Ao assistir a uma corrida de Formula One, é fácil identificar o carro da sua equipe favorita. O vermelho brilhante da Ferrari ou o prata da Mercedes destacam-se volta após volta.
Pedir a uma máquina para fazer o mesmo, não em uma pista limpa, mas em ruas movimentadas e cheias de tráfego, é muito mais desafiador. É por isso que a reidentificação de veículos (Re-ID de veículos) tem ganhado atenção no espaço de IA recentemente.
A reidentificação de veículos dá às máquinas a capacidade de reconhecer o mesmo veículo em câmeras multi-visão ou sem sobreposição. Também visa identificar veículos após oclusão temporária (quando um veículo está parcialmente oculto) ou mudanças de iluminação e ponto de vista.
Uma tecnologia central que impulsiona a Re-ID de veículos é a computer vision. A computer vision é um subcampo da inteligência artificial que se concentra em ensinar máquinas a entender e interpretar informações visuais, como imagens e vídeos. Usando essa tecnologia, sistemas de IA podem analisar características de veículos e rastreá-los de forma confiável em grandes redes de câmeras para aplicações como vigilância urbana e monitoramento de tráfego.
Em particular, modelos de Vision AI como Ultralytics YOLO11 e o próximo Ultralytics YOLO26 suportam tarefas como detecção e rastreamento de objetos. Eles podem localizar rapidamente veículos em cada quadro e seguir seu movimento através de uma cena. Quando esses modelos são combinados com redes de reidentificação de veículos, o sistema combinado pode reconhecer o mesmo veículo através de diferentes feeds de câmera, mesmo quando as vistas ou condições de iluminação mudam.
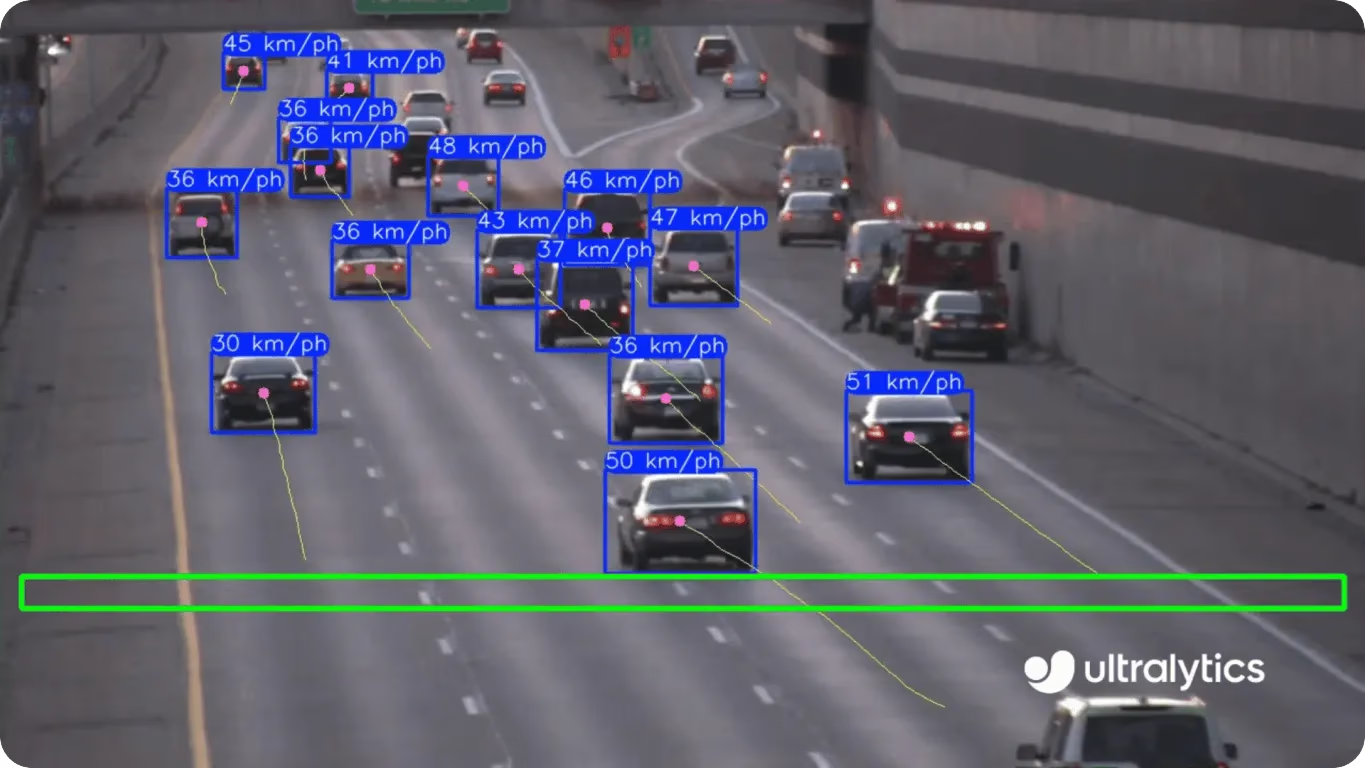
Fig 1. Um exemplo de uso do YOLO11 para rastreamento de veículos e estimativa de velocidade (Source)
Neste artigo, analisamos como funciona a reidentificação de veículos, a tecnologia que a torna possível e onde está sendo usada em sistemas de transporte inteligentes. Vamos começar!
Link to this sectionO que é reidentificação de veículos?#
A reidentificação de veículos é uma importante application in computer vision. Ela se concentra em reconhecer o mesmo veículo à medida que ele aparece em diferentes câmeras que não se sobrepõem, mantendo sua identidade consistente enquanto se move por uma cidade. Isso é desafiador porque cada câmera pode capturar o veículo de um ângulo diferente, sob iluminação diferente ou com oclusão parcial.
Considere um cenário onde um sedã azul passa por um cruzamento e depois aparece em uma rua diferente, monitorado por outra câmera. O ângulo, a iluminação e o fundo mudaram, e outros carros podem bloquear brevemente a visão. Apesar disso, o sistema de Re-ID de veículos ainda precisa determinar que é o mesmo veículo.
Avanços recentes em deep learning, especialmente com redes neurais convolucionais (CNNs) e modelos baseados em transformer, tornaram este processo muito mais preciso. Esses modelos podem extrair padrões visuais significativos e distinguir entre veículos parecidos, enquanto ainda identificam o correto.
Em sistemas de transporte inteligentes, essa capacidade suporta monitoramento contínuo, reconstrução de rotas e análise de tráfego em toda a cidade, dando aos sistemas de cidades inteligentes uma imagem mais clara de como os veículos se movem. Eles ajudam a melhorar a segurança e a eficiência.
Link to this sectionEntendendo como funciona a reidentificação de veículos#
Normalmente, as imagens de vídeo de cruzamentos, áreas de estacionamento e rodovias são analisadas usando técnicas de reidentificação de veículos para determinar se o mesmo veículo aparece em diferentes câmeras. Este conceito é semelhante à reidentificação de pessoas, onde sistemas rastreiam indivíduos em múltiplas vistas, mas aqui o foco é analisar características específicas do veículo em vez da aparência humana.
O processo para fazer isso envolve várias etapas principais, cada uma projetada para ajudar o sistema a detectar veículos, extrair suas características visuais e combiná-los de forma confiável através de diferentes pontos de vista.
Em um nível alto, o sistema primeiro detecta veículos em cada quadro e, em seguida, extrai características como cor, forma e textura para criar uma representação digital única, ou embedding, para cada um. Esses embeddings são comparados ao longo do tempo e entre câmeras, muitas vezes apoiados por rastreamento de objetos e verificações espaço-temporais, para decidir se dois avistamentos pertencem ao mesmo veículo.
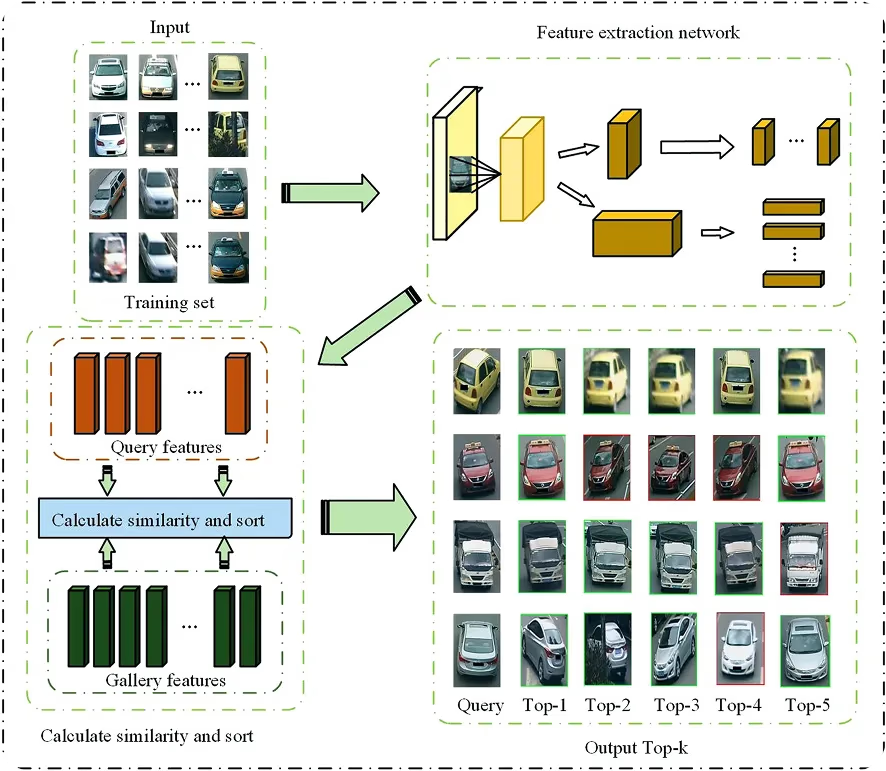
Fig 2. Como funciona a reidentificação de veículos. (Source)
Aqui está um olhar mais detalhado sobre este processo:
- Object detection: O sistema primeiro identifica e localiza veículos dentro de cada quadro de vídeo, para saber exatamente quais regiões processar. Esta etapa é geralmente tratada por modelos de detecção de objetos.
- Feature extraction: Após a detecção, uma rede dedicada de Re-ID ou de extração de características analisa cada recorte de veículo e gera mapas de características ou representações de características que capturam detalhes visuais como cor, forma, textura e partes distintas.
- Embedding generation: Essas características extraídas são transformadas em uma representação numérica chamada feature embedding. Este embedding atua como uma impressão digital que captura como o veículo aparece de diferentes ângulos. Antes da correspondência, esses embeddings são geralmente normalizados para que as diferenças causadas pela iluminação, contraste ou configurações da câmera não interfiram na comparação de identidade. A normalização garante que o sistema se concentre em características significativas relacionadas à identidade, em vez de ruído.
- Object tracking: Dentro de uma única visão de câmera, algoritmos de rastreamento conectam detecções entre quadros, ajudando a manter uma identidade consistente à medida que o veículo se move pela cena.
- Cross-camera matching: Para combinar o mesmo veículo em diferentes câmeras, o sistema compara embeddings (gerados pela rede de Re-ID) juntamente com informações de tempo e localização. Esta etapa determina se dois avistamentos pertencem ao mesmo veículo, mesmo quando as câmeras não se sobrepõem.
Link to this sectionComo os modelos Ultralytics YOLO podem apoiar a reidentificação de veículos#
Os modelos Ultralytics YOLO desempenham um papel de suporte importante nos pipelines de reidentificação de veículos. Embora não realizem Re-ID por conta própria, eles fornecem outras capacidades essenciais, como detecção rápida e rastreamento estável, das quais as redes de Re-ID dependem para uma correspondência precisa entre câmeras.
A seguir, vamos dar uma olhada mais de perto em como os modelos Ultralytics YOLO, como o YOLO11, podem aprimorar os sistemas de reidentificação de veículos.
Link to this sectionUm módulo de detecção de veículos preciso: a primeira parte dos sistemas de Re-ID#
A base de qualquer sistema de reidentificação de veículos é a detecção precisa de objetos. Os modelos Ultralytics YOLO como o YOLO11 são uma ótima opção para isso, já que podem detectar rapidamente veículos em cada quadro, mesmo em cenas movimentadas com oclusões parciais, tráfego intenso ou condições de iluminação variáveis.
Eles também podem ser treinados de forma personalizada, o que significa que podes ajustar o modelo em seu próprio conjunto de dados para que ele aprenda a reconhecer tipos de veículos específicos, como táxis, vans de entrega ou veículos de frota. Isso é especialmente útil quando uma solução requer uma detecção mais especializada. Ao fornecer caixas delimitadoras (bounding boxes) limpas e precisas, os modelos Ultralytics YOLO fornecem às redes de Re-ID entradas de alta qualidade para trabalhar, o que leva a uma correspondência mais confiável entre câmeras.
Link to this sectionApoiando o rastreamento confiável de câmera única#
Uma vez que os veículos são detectados, modelos como o YOLO11 também podem suportar o rastreamento estável de objetos dentro de uma única visão de câmera. O rastreamento de objetos é o processo de seguir um veículo detectado em quadros consecutivos e atribuir-lhe um ID consistente à medida que ele se move.
Com suporte integrado para algoritmos de rastreamento como ByteTrack e BoT-SORT no Ultralytics Python package, o YOLO11 pode manter IDs consistentes à medida que os veículos se movem através de uma cena. Este rastreamento estável reduz as trocas de identidade antes que o sistema de Re-ID assuma, o que, em última análise, melhora a precisão da correspondência entre câmeras.
Link to this sectionRe-ID opcional em nível de rastreador para melhor estabilidade de identidade#
Além do rastreamento padrão baseado em movimento, o Ultralytics Python package inclui Re-ID capabilities opcionais baseadas em aparência dentro de seu rastreador BoT-SORT. Isso significa que o rastreador pode usar características de aparência visual, não apenas padrões de movimento ou sobreposição de caixas delimitadoras, para determinar se duas detecções pertencem ao mesmo veículo.
Quando ativado, o BoT-SORT extrai embeddings de aparência leves do detector ou de um modelo de classificação YOLO11 e os usa para verificar a identidade entre os quadros. Esta dica adicional de aparência ajuda o rastreador a manter IDs mais estáveis em situações desafiadoras, como breves oclusões, veículos passando próximos ou pequenas mudanças causadas pelo movimento da câmera.
Embora esta Re-ID integrada não tenha a intenção de substituir a reidentificação de veículos completa entre câmeras, ela melhora a consistência da identidade dentro de uma única visão de câmera e produz tracklets mais limpos nos quais os módulos de Re-ID downstream podem confiar. Para usar esses recursos de rastreamento baseados em aparência, basta ativar a Re-ID em um arquivo de configuração do rastreador BoT-SORT, definindo “with_reid” como “True” e selecionando qual modelo fornecerá as características de aparência.
Para mais detalhes, podes conferir a documentation page on object tracking da Ultralytics, que explica as opções de Re-ID disponíveis e como configurá-las.
Link to this sectionFornecendo entradas de alta qualidade para redes de Re-ID#
Além de melhorar a estabilidade da identidade durante o rastreamento, os modelos YOLO também desempenham um papel importante na preparação de entradas visuais limpas para a própria rede de Re-ID.
Após a detecção de um veículo, sua caixa delimitadora é normalmente recortada e enviada para uma rede de reidentificação, que extrai as características visuais necessárias para a correspondência. Como os modelos de Re-ID dependem fortemente dessas imagens recortadas, entradas ruins, como recortes borrados, desalinhados ou incompletos, podem levar a embeddings mais fracos e a uma correspondência menos confiável entre câmeras.
Os modelos Ultralytics YOLO ajudam a reduzir esses problemas produzindo consistentemente caixas delimitadoras limpas e bem alinhadas que capturam totalmente o veículo de interesse. Com recortes mais claros e precisos, a rede de Re-ID pode se concentrar em detalhes significativos como cor, forma, textura e outras características distintivas. Entradas de alta qualidade levam a um desempenho de Re-ID mais confiável e preciso entre as visões das câmeras.
Link to this sectionAtivando a correspondência entre câmeras quando combinada com um modelo de Re-ID#
Embora os modelos Ultralytics YOLO não realizem a reidentificação por conta própria, eles fornecem as informações críticas que uma rede de Re-ID precisa para comparar veículos entre diferentes visões de câmera. Modelos como o YOLO11 podem cuidar da localização e rastreamento de veículos dentro de cada câmera, enquanto o modelo de Re-ID determina se dois recortes de veículos de diferentes locais pertencem à mesma identidade.
Quando esses componentes trabalham juntos, o YOLO para detecção e rastreamento e um modelo de embedding dedicado para extração de características, eles formam um pipeline completo de correspondência de veículos com múltiplas câmeras. Isso torna possível associar o mesmo veículo à medida que ele se move através de uma rede de câmeras maior.
Por exemplo, em um estudo recente, pesquisadores usaram um modelo YOLO11 leve como o vehicle detector em um sistema de rastreamento online com várias câmeras. O estudo descobriu que usar o YOLO11 ajudou a reduzir o tempo de detecção sem sacrificar a precisão, o que melhorou o desempenho geral do rastreamento a jusante e da correspondência entre câmeras.

Fig 3. Rastreamento e reidentificação de veículos múltiplos baseados em YOLO11 em várias câmeras. (Source)
Link to this sectionArquiteturas baseadas em deep learning para Re-ID de veículos#
Agora que temos uma compreensão melhor de como os modelos Ultralytics YOLO podem apoiar a reidentificação de veículos, vamos dar uma olhada mais detalhada nos modelos de deep learning que lidam com as etapas de extração de características e correspondência. Esses modelos são responsáveis por aprender como os veículos se parecem, criando embeddings robustos e distinguindo entre veículos visualmente semelhantes entre diferentes visões de câmera.
Aqui estão alguns exemplos dos componentes centrais de deep learning usados em sistemas de reidentificação de objetos:
-
Feature extraction com CNNs: Redes neurais convolucionais como ResNet50 ou ResNet101 aprendem características profundas através do reconhecimento de padrões, identificando elementos como cor, forma e textura que diferenciam um veículo de outro. Esses padrões aprendidos são então convertidos em embeddings que atuam como a representação digital única do veículo.
-
Attention mechanisms e transformers: Redes e camadas de atenção, incluindo atenção espacial, podem ajudar a destacar regiões importantes de um veículo, como faróis, janelas ou áreas da placa. A atenção espacial concentra o modelo onde as pistas visuais mais informativas estão localizadas, enquanto modelos baseados em transformer como Vision Transformers (ViT) capturam relacionamentos globais em toda a imagem. Juntos, eles melhoram a precisão refinada quando os veículos parecem muito semelhantes.
-
Redes baseadas em partes e multi-ramificações: Alguns modelos de Re-ID analisam regiões específicas do veículo separadamente, como o teto, lanternas traseiras ou painéis laterais, e então combinam os resultados. Isso significa que o sistema permanece robusto mesmo quando os veículos estão parcialmente ocultos ou vistos de ângulos difíceis.
Além desses componentes arquitetônicos, o aprendizado de métricas desempenha um papel fundamental no treinamento de modelos de Re-ID de veículos. Funções de perda como triplet loss, contrastive loss e cross-entropy loss ajudam o sistema a aprender embeddings fortes e discriminativos, aproximando imagens do mesmo veículo e afastando diferentes.
Link to this sectionConjuntos de dados e benchmarks populares de reidentificação de veículos#
Na pesquisa de computer vision, a qualidade de um conjunto de dados tem um impacto importante em quão bem um modelo funciona depois de implantado. Um conjunto de dados fornece as imagens ou vídeos rotulados com os quais um modelo aprende.
Para a reidentificação de veículos, esses conjuntos de dados de última geração devem capturar condições diversas, como iluminação, mudanças de ponto de vista e variações climáticas. Essa diversidade ajuda os modelos a lidar com a complexidade de ambientes de transporte do mundo real.
Aqui está um vislumbre de conjuntos de dados populares que suportam o treinamento, otimização e avaliação de modelos de reidentificação de veículos:
- VeRi-776 dataset: É uma coleção de mais de 50.000 imagens de veículos anotadas capturadas de 20 câmeras de cidade. As anotações incluem ID do veículo, cor, modelo e regiões da placa, permitindo um aprendizado detalhado de características.
- VehicleID dataset: Este conjunto de dados em grande escala tem mais de 200.000 imagens representando mais de 26.000 veículos. É frequentemente escolhido para estudar a escalabilidade e para realizar comparações de linha de base entre diferentes métodos.
- VeRi-Wild dataset: É projetado para refletir a variabilidade do mundo real, incluindo diferenças de ponto de vista, clima e oclusão parcial. É comumente usado para avaliar a robustez e a generalização do modelo.

Fig 4. Exemplo de veículos no conjunto de dados VeRi-776. (Source)
O desempenho do modelo nesses conjuntos de dados é geralmente avaliado usando métricas como mAP (mean average precision) e precisão Rank-1 ou Rank-5. O mAP mede quão precisamente o modelo recupera todas as correspondências relevantes para um determinado veículo, enquanto as pontuações Rank-1 e Rank-5 indicam se a correspondência correta aparece no topo da lista de resultados ou dentro das primeiras previsões.
Juntos, esses benchmarks dão aos pesquisadores uma maneira consistente de comparar diferentes abordagens e desempenham um papel importante na orientação do desenvolvimento de sistemas de reidentificação de veículos mais precisos e confiáveis para uso no mundo real.
Link to this sectionAplicações da reidentificação de veículos#
Agora que cobrimos os fundamentos, vamos percorrer alguns casos de uso do mundo real onde a reidentificação de veículos suporta fluxos de trabalho práticos de transporte, mobilidade e vigilância.
Link to this sectionVigilância e monitoramento de tráfego urbano#
Estradas urbanas movimentadas estão constantemente cheias de movimento, e as câmeras de tráfego muitas vezes lutam para manter o controle do mesmo veículo à medida que ele se move entre diferentes áreas. Mudanças na iluminação, cenas lotadas e veículos que parecem quase idênticos podem fazer com que identidades sejam perdidas entre câmeras.
A reidentificação de veículos resolve isso detectando veículos claramente, extraindo características distintas e mantendo IDs consistentes mesmo em filmagens de baixa resolução ou movimentadas. O resultado é um rastreamento contínuo e mais suave por toda a rede, dando às equipes de tráfego uma imagem mais clara de como os veículos se movem pela cidade e permitindo respostas mais rápidas e informadas ao congestionamento e incidentes.
Link to this sectionSistemas de estacionamento inteligentes#
Instalações de estacionamento inteligentes dependem da identificação consistente de veículos para gerenciar entrada, saída, controle de acesso e alocação de espaço. No entanto, as câmeras nesses ambientes frequentemente capturam veículos de ângulos incomuns e sob iluminação desafiadora, como em garagens subterrâneas, áreas sombreadas ou lotes externos ao anoitecer.
Essas condições tornam mais difícil confirmar se o mesmo veículo está sendo visto em diferentes zonas. Quando as identidades são inconsistentes, os registros de estacionamento podem ser interrompidos, o controle de acesso torna-se menos confiável e os motoristas podem sofrer atrasos. É por isso que muitos sistemas de estacionamento inteligentes incorporam modelos de reidentificação de veículos para manter uma identidade estável para cada veículo à medida que ele se move pela instalação.
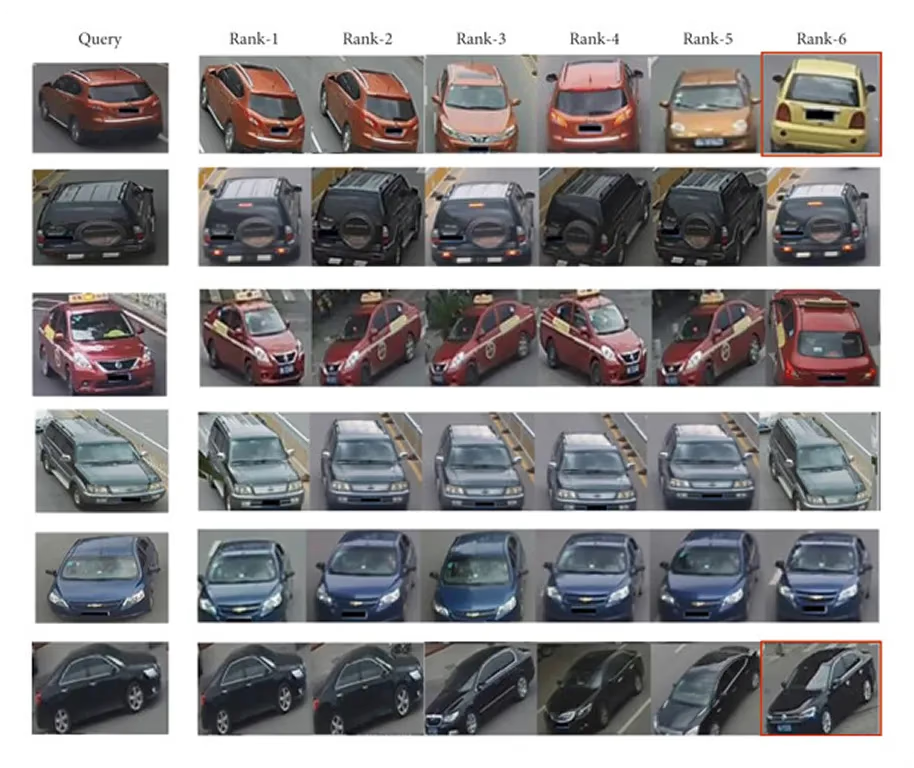
Fig 5. Um exemplo de reidentificação de veículos mostrando a imagem do veículo selecionado à esquerda e os resultados de busca correspondentes à direita. (Source)
Link to this sectionAplicação da lei e forense#
Construindo sobre o monitoramento de tráfego, a reidentificação de veículos também desempenha um papel importante na aplicação da lei e em investigações forenses. Em muitos casos, os oficiais precisam seguir um veículo através de várias câmeras, mas as placas de licença podem estar ilegíveis, faltando ou deliberadamente ocultas.
Cenas lotadas, baixa visibilidade e oclusão parcial podem fazer com que veículos diferentes pareçam enganosamente semelhantes, tornando a identificação manual lenta e pouco confiável. A reidentificação de veículos pode ser usada para rastrear o movimento de um veículo através de redes de câmeras sem sobreposição, analisando suas características visuais em vez de depender apenas das placas de licença.
Isso significa que os investigadores podem seguir mais facilmente os movimentos de um veículo, entender quando ele apareceu em diferentes locais e confirmar seu caminho antes e depois de um incidente. A Re-ID de veículos com IA também suporta tarefas como rastrear veículos suspeitos, revisar filmagens de incidentes ou determinar em qual direção um veículo viajou antes ou depois de um evento.
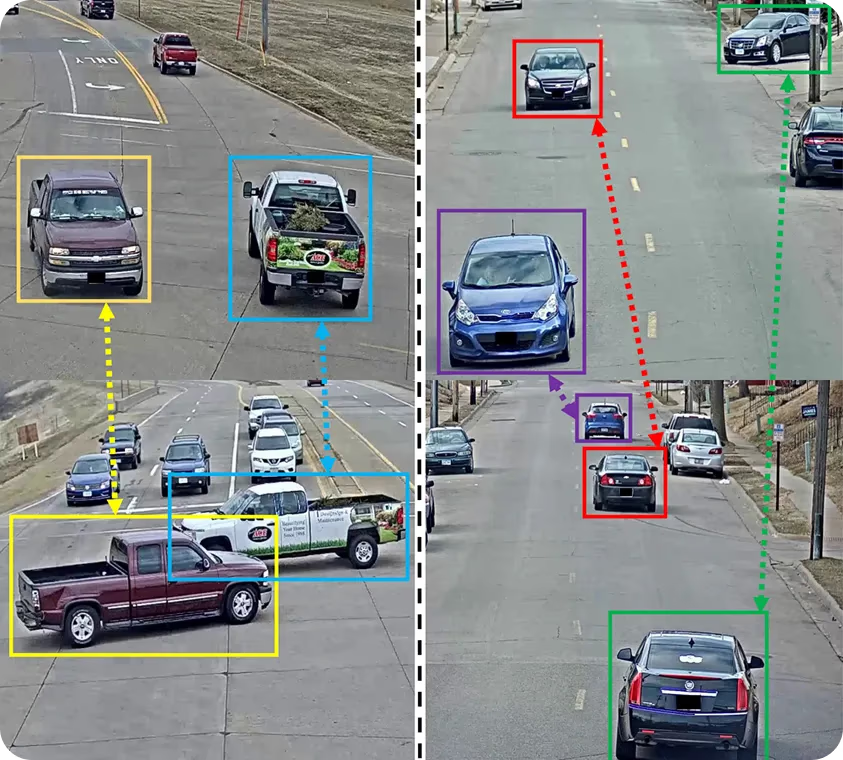
Fig 6. Veículos correspondidos através de diferentes câmeras com perspectivas variadas. (Source)
Link to this sectionRastreamento de frota e logística#
Operações de frota e logística muitas vezes dependem de GPS, etiquetas RFID e registros manuais para rastrear o movimento de veículos, mas essas ferramentas deixam lacunas em áreas cobertas por câmeras de segurança ou de pátio, como docas de carga, pátios de armazéns e redes rodoviárias internas.
Os veículos frequentemente se movem entre câmeras que não se sobrepõem, desaparecem atrás de estruturas ou parecem quase idênticos a outros na frota, tornando difícil confirmar se o mesmo veículo foi visto em diferentes locais. Os sistemas de reidentificação de veículos podem ajudar a fechar essas lacunas analisando detalhes visuais e informações de tempo para manter uma identidade consistente para cada veículo à medida que ele se move pela instalação.
Isso dá aos gerentes de frota uma visão mais completa da atividade dentro de seus centros, apoiando tarefas como verificar rotas de entrega, identificar movimentos incomuns e garantir que os veículos sigam as rotas esperadas.
Link to this sectionPrós e contras das tarefas de Re-ID de veículos#
Aqui estão alguns dos principais benefícios de usar a reidentificação de veículos habilitada por IA:
- Carga de trabalho manual reduzida: A Re-ID de veículos automatiza tarefas de correspondência de identidade que, de outra forma, exigiriam uma revisão manual extensa, reduzindo significativamente o tempo e o esforço necessários para analisar filmagens de vídeo.
- Automação e insights em tempo real: Ao combinar detecção, rastreamento e correspondência de características, a Re-ID de veículos suporta monitoramento automatizado contínuo e pode fornecer alertas em tempo real para uma resposta mais rápida a incidentes.
- Escalabilidade e adaptabilidade: Modelos de Re-ID podem se adaptar a novos ambientes, condições de iluminação ou ângulos de câmera através de aprendizado de características robusto, extração de características multiescala e representações invariantes que permanecem estáveis sob mudanças visuais. Essas capacidades os tornam adequados tanto para redes de grandes cidades quanto para implantações menores.
Embora a reidentificação de veículos ofereça muitas vantagens, também existem algumas limitações a serem consideradas. Aqui estão alguns fatores que afetam sua confiabilidade em ambientes do mundo real:
- Alta demanda computacional: A extração de características, a geração de embeddings e a correspondência entre câmeras exigem um poder de processamento significativo, especialmente ao monitorar grandes redes de câmeras.
- Variabilidade ambiental: Fatores como iluminação noturna, mudanças climáticas, sombras e oclusões podem degradar a capacidade do modelo de manter identidades consistentes entre as cenas.
- Limitações de conjunto de dados e domínio: Modelos treinados em conjuntos de dados limitados ou idealizados podem não se generalizar bem para condições do mundo real sem um ajuste fino adicional ou adaptação de domínio.
Link to this sectionO caminho a seguir para métodos de reidentificação de veículos#
A reidentificação de veículos continua avançando à medida que a tecnologia evolui. Publicações recentes do IEEE, CVPR e arXiv, juntamente com apresentações em conferências internacionais, destacam uma mudança clara para modelos mais ricos que combinam múltiplas fontes de dados e raciocínio de características mais avançado. O trabalho futuro nesta área provavelmente se concentrará na construção de sistemas que sejam mais robustos, eficientes e capazes de lidar com a variabilidade do mundo real em escala.
Por exemplo, uma direção promissora é o uso de transformer-based models e redes de agregação de grafos. Transformers podem analisar uma imagem inteira e entender como todos os detalhes visuais se encaixam, o que ajuda o sistema a reconhecer o mesmo veículo mesmo quando o ângulo ou a iluminação mudam.
Modelos baseados em grafos levam isso um passo adiante ao tratar diferentes partes do veículo ou ângulos de câmera como pontos conectados em uma rede. Isso permite que o sistema entenda a correlação entre esses pontos-chave e tome melhores decisões sobre identidades de veículos e características discriminativas.
Outro avanço importante é a fusão de dados multi-modal e a fusão de características. Em vez de depender apenas de imagens, sistemas mais novos combinam informações visuais com outros sinais multimídia, como dados de GPS ou padrões de movimento de sensores. Esse contexto extra torna mais fácil para o sistema manter a precisão quando veículos estão parcialmente bloqueados, quando a iluminação é ruim ou quando os ângulos da câmera mudam repentinamente.
Link to this sectionPrincipais pontos#
A reidentificação de veículos está se tornando uma metodologia chave em sistemas de transporte inteligente, ajudando cidades a rastrear veículos de forma mais confiável através de diferentes câmeras. Graças aos avanços em aprendizado profundo e melhor validação usando conjuntos de dados mais ricos e diversos, esses sistemas estão se tornando mais precisos e práticos em condições do mundo real.
À medida que a tecnologia evolui, é importante equilibrar a inovação com práticas responsáveis em torno de privacidade, segurança e ética. No geral, esses avanços estão abrindo caminho para redes de transporte mais inteligentes, seguras e eficientes.
Explore mais sobre IA visitando nosso repositório GitHub e juntando-se à nossa comunidade. Confira nossas páginas de soluções para saber mais sobre IA em robótica e visão computacional na fabricação. Descubra nossas opções de licenciamento para começar a usar IA de visão hoje mesmo!






