Melhorando a previsão de colisões com modelos Ultralytics YOLO
Saiba como insights dos modelos Ultralytics YOLO ajudam sistemas de previsão de colisões a tomar decisões mais seguras e rápidas em ambientes dinâmicos.
Mesmo sendo cuidadoso na estrada, acidentes ainda podem acontecer. Um carro muda de faixa, um pedestre atravessa fora da faixa ou um ciclista acelera sem aviso. Esses momentos do cotidiano são exemplos de quando sistemas de previsão de colisões podem fazer uma diferença real e ajudar a manter todos em segurança.
Anteriormente, examinamos a previsão de trajetória de bola e vimos como prever o caminho de uma bola em alta velocidade ajuda a análise esportiva a compreender o movimento e antecipar o que acontecerá a seguir. A previsão de colisões funciona de maneira semelhante.
Esses sistemas de previsão essencialmente olham para o futuro. Ao observar como veículos e pedestres se movem, eles conseguem detectar riscos precocemente e ajustar sua trajetória ou comportamento (o que também é conhecido como planejamento de movimento ou planejamento de caminho) antes que as coisas tomem um rumo perigoso.
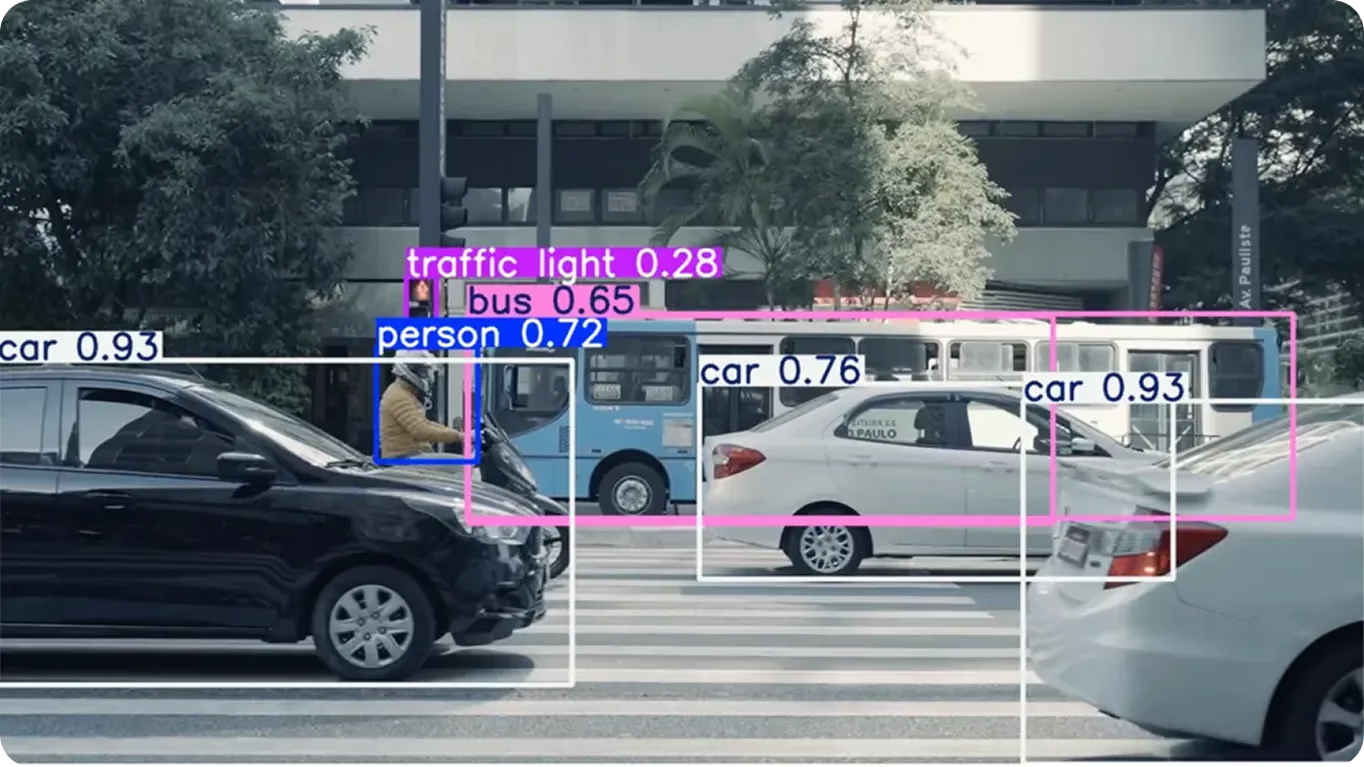
As principais tecnologias de computação por trás dos sistemas de previsão de colisões são a inteligência artificial e seus subcampos, como visão computacional e métodos de previsão que ajudam a antecipar como as coisas se moverão. Por exemplo, modelos de visão computacional como o Ultralytics YOLO11 e o futuro Ultralytics YOLO26 podem ser usados para detectar e rastrear objetos como veículos e pedestres em tempo real, e modelos de previsão usam esses insights para estimar seus próximos movimentos.
Fig 1. Um exemplo do YOLO11 sendo usado para detectar objetos na estrada (Fonte).
O resultado é um sistema de IA que entende o que está acontecendo ao seu redor e apoia a tomada de decisões mais inteligentes em ambientes dinâmicos. Neste artigo, exploraremos como a previsão de colisões funciona, os métodos por trás dela e o papel que a visão computacional e os modelos Ultralytics YOLO podem desempenhar nesse processo. Vamos começar!
Link to this sectionO que é previsão de colisões?#
A previsão de colisões é a capacidade de um sistema de IA entender como os objetos estão se movendo e antecipar quando eles podem ficar muito próximos ou entrar em contato. Diferentes sistemas podem usar essas informações de várias maneiras, incluindo o suporte a recursos de segurança, otimização de movimento ou coordenação de ações em espaços compartilhados.
Onde quer que objetos se movam através de um espaço compartilhado, seja carros em uma rodovia, empilhadeiras no corredor de um armazém ou pedestres atravessando uma rua, a previsão de colisões ajuda os sistemas a entender como essas interações podem se desenrolar. Em aplicações focadas em segurança, essa previsão pode ser usada para reduzir riscos, enquanto em outros contextos, pode apoiar tarefas como planejamento de rotas, cronometragem ou movimento coordenado.
Por exemplo, em muitos veículos mais novos equipados com sistemas avançados de assistência ao motorista, ou ADAS, câmeras e sensores monitoram a estrada à frente e estimam a rapidez com que o carro está se aproximando de objetos próximos. Se o sistema detectar que uma situação pode se tornar insegura, ele alerta o motorista e, em alguns casos, a frenagem automática pode ajudar a reduzir o impacto.
Link to this sectionExplorando as quatro etapas da previsão de colisões#
A previsão de colisões envolve um processo coordenado no qual diferentes componentes de IA trabalham juntos para identificar objetos, seguir seu movimento e estimar o que pode acontecer a seguir. Esses sistemas normalmente funcionam em quatro etapas conectadas: detecção de objetos, rastreamento de objetos, previsão de trajetória e, finalmente, a previsão de colisões, com cada etapa construindo-se sobre a precisão da anterior.
A seguir, vamos analisar mais de perto como cada etapa funciona.
Link to this sectionUm olhar sobre a detecção de objetos#
Detecção de objetos é uma tarefa central da visão computacional na qual modelos de IA de visão identificam e localizam objetos em uma imagem ou quadro de vídeo. Ao analisar dados de pixels, um modelo de detecção de objetos pode produzir três saídas principais: caixas delimitadoras, classes de objetos e pontuações de confiança. Caixas delimitadoras mostram onde um objeto está, classes de objetos indicam o que ele é, como um carro, pedestre ou ciclista, e pontuações de confiança refletem o quão certo o modelo está sobre a previsão.
Modelos de IA de visão como YOLO11 e YOLO26 baseiam-se nessa fundação e suportam várias tarefas relacionadas, incluindo detecção de objetos, rastreamento de objetos e detecção de caixa delimitadora orientada (OBB). A detecção de objetos pode dizer a um sistema de previsão o que está em cada quadro, o rastreamento segue esses objetos à medida que se movem, e as caixas delimitadoras orientadas fornecem formas mais precisas para objetos que aparecem em diferentes ângulos.
Nesta etapa, um sistema de previsão de colisões está focado puramente em entender o que está presente nos dados visuais. Ele forma a camada base de informações da qual todas as etapas posteriores dependem, mas ainda não considera como os objetos se moverão ou interagirão.
Link to this sectionUma visão geral do rastreamento de objetos#
Uma vez que os objetos são detectados, o próximo passo é rastreá-los através dos quadros para que o sistema possa entender como eles se movem ao longo do tempo. Enquanto a detecção fornece novas caixas delimitadoras a cada quadro, o rastreamento de objetos adiciona continuidade ao vincular essas detecções ao longo do tempo.
Algoritmos de rastreamento suportados pelo pacote Python da Ultralytics, como ByteTrack ou BoT-SORT, funcionam com modelos como YOLO11 usando dados de detecção de cada quadro para seguir objetos à medida que eles se movem. Esses algoritmos atribuem um ID exclusivo a cada objeto e o usam para manter essa identidade mesmo quando o objeto se move rapidamente ou fica parcialmente oculto. Isso cria um histórico de rastreamento suave que captura como o objeto se move.

Fig 2. Um olhar sobre a atribuição de IDs exclusivos para diferentes detecções usando YOLO (Fonte)
Aqui está uma rápida visão de como esses dois métodos de rastreamento funcionam:
- ByteTrack: Ele usa detecções de alta e baixa confiança para manter IDs de objetos consistentes, com previsões de movimento de um Filtro de Kalman ajudando o rastreador a permanecer estável quando os objetos se movem rapidamente ou são brevemente difíceis de detectar.
- BoT-SORT: Este algoritmo estende o SORT combinando previsões de movimento do Filtro de Kalman com dicas de aparência, permitindo que o rastreador siga objetos de forma mais confiável em cenas lotadas ou durante oclusão parcial.
Para medir o desempenho desses métodos de rastreamento, pesquisadores os avaliam em conjuntos de dados e benchmarks estabelecidos de rastreamento de múltiplos objetos (MOT). Além disso, métricas comumente usadas incluem precisão de rastreamento de múltiplos objetos (MOTA), que reflete a qualidade geral do rastreamento; a pontuação F1 de identificação (IDF1), que mede quão consistentemente as identidades dos objetos são mantidas; e a precisão de rastreamento de ordem superior (HOTA), que oferece uma visão equilibrada tanto do desempenho da detecção quanto da precisão da associação.
Link to this sectionEntendendo a previsão de trajetória#
Após rastrear um objeto através de múltiplos quadros, o próximo passo é prever para onde ele irá a seguir. Isso é conhecido como previsão de trajetória. Enquanto a detecção encontra objetos e o rastreamento segue como eles se movem, a previsão olha para frente e estima suas posições futuras.
As informações da detecção e rastreamento, como a caixa delimitadora de um objeto, posição através dos quadros e ID atribuído, podem ser usadas para calcular características de movimento como velocidade, direção e padrões de movimento. Esses insights derivados dão ao modelo de previsão os dados necessários para estimar onde o objeto provavelmente estará nos próximos segundos.
Em casos onde os dados de rastreamento contêm lacunas ou saltos abruptos, técnicas de interpolação ajudam a reconstruir trajetórias mais suaves e consistentes. Isso garante que o modelo de previsão receba entrada de movimento de alta qualidade em vez de dados de posição ruidosos ou incompletos.
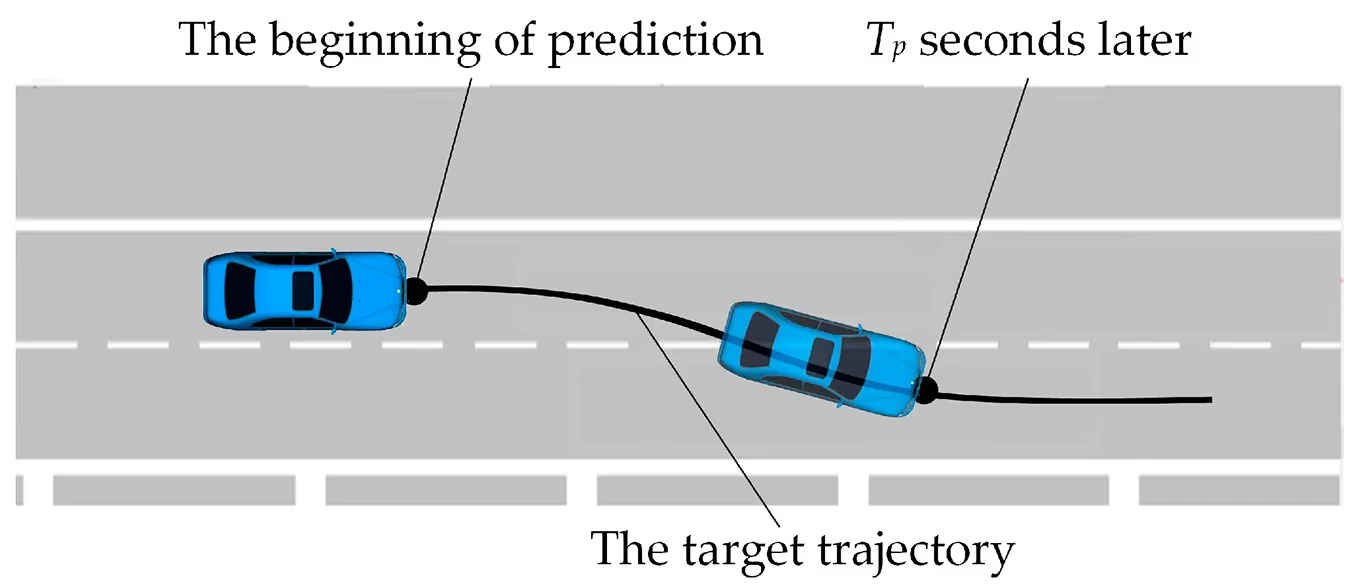
Fig 3. Uma visualização da previsão da trajetória de um carro. (Fonte)
Para fazer essas previsões, muitos sistemas dependem de modelos de aprendizado profundo projetados para entender como o movimento de um objeto muda ao longo do tempo. Ao analisar sequências de posições passadas e as características de movimento derivadas delas, esses modelos aprendem padrões de movimento comuns e usam esse conhecimento para prever caminhos futuros.
Aqui estão algumas abordagens de aprendizado profundo e aprendizado de máquina comumente usadas para previsão de trajetória:
-
Redes Neurais Recorrentes (RNNs): As RNNs são modelos de aprendizado profundo projetados para trabalhar com sequências, como uma série de quadros de vídeo. Elas podem manter uma memória de posições anteriores e usar essa informação para entender como um objeto tem se movido. Isso ajuda o sistema a reconhecer padrões de movimento simples, como acelerar, desacelerar ou mover-se em linha reta.
-
Redes de Memória de Longo Curto Prazo (LSTMs): As LSTMs são um tipo mais avançado de RNN que pode lembrar informações por períodos mais longos. Isso permite que capturem movimentos mais complexos, como um veículo se preparando para virar ou um pedestre mudando de direção. Como conseguem rastrear tendências mais longas, muitas vezes produzem previsões mais confiáveis em ambientes movimentados.
-
Transformers: Transformers processam sequências de movimento completas e usam atenção para focar nos detalhes mais importantes dessas sequências. Isso os torna especialmente eficazes em cenas onde múltiplos objetos interagem, como carros se fundindo ou pedestres atravessando.
Esses modelos podem prever caminhos de curto e longo prazo. Previsões de curto prazo, geralmente abaixo de dois segundos, tendem a ser as mais precisas, enquanto previsões em janelas mais longas, como de dois a seis segundos, fornecem mais previsão, mas vêm com maior incerteza.
Link to this sectionJuntando tudo: Algoritmos de detecção de colisões#
Na etapa final, a previsão de colisões, o sistema usa tudo o que aprendeu até agora: o que cada objeto é (detecção), como ele se moveu (rastreamento) e para onde é provável que vá a seguir (previsão). Este passo verifica se algum dos caminhos previstos pode se cruzar de uma maneira que poderia levar a uma colisão.
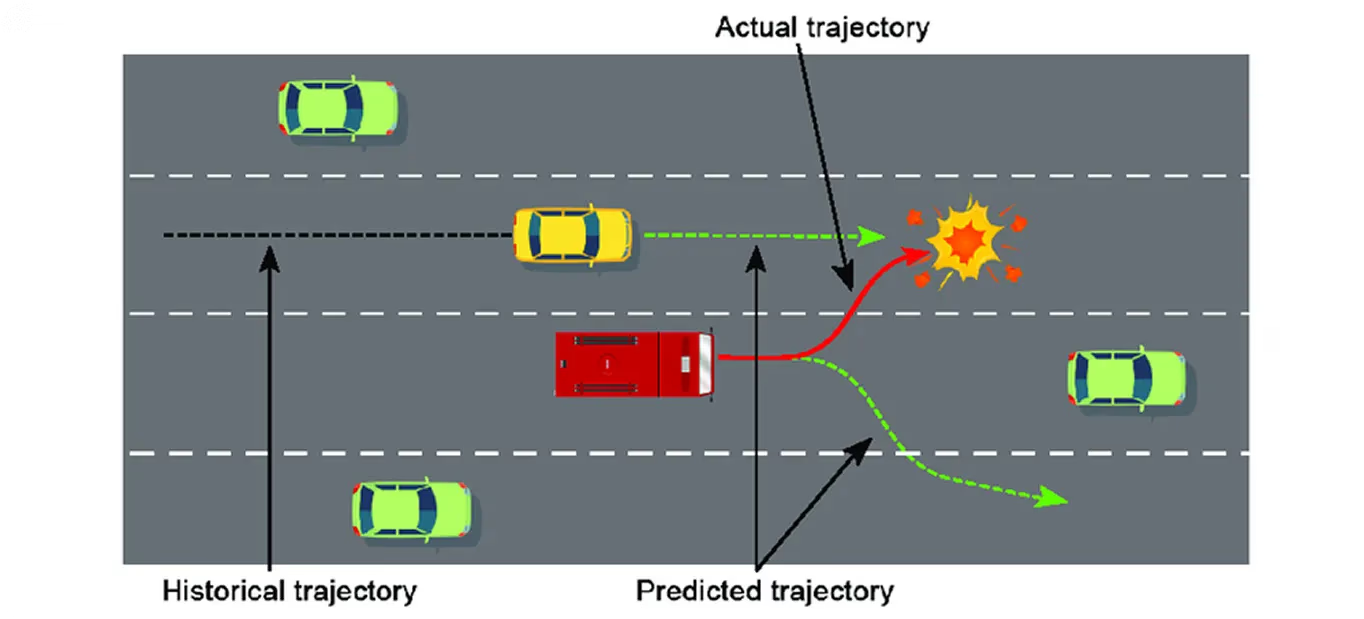
Fig 4. Como funciona um sistema de previsão de colisões (Fonte)
No caso de veículos autônomos, um sistema de verificação de colisão compara as trajetórias futuras de objetos próximos, como carros, pedestres e ciclistas. Se dois caminhos previstos se sobrepõem ou chegam perigosamente perto, ele marca a situação como uma possível colisão de veículo. Para entender quão urgente o risco de colisão pode ser, o sistema também calcula um valor conhecido como tempo até a colisão.
O tempo até a colisão (TTC) é uma medida fundamental em ambientes de movimento rápido. Ele estima quanto tempo resta antes que dois objetos colidam se continuarem em suas velocidades e direções atuais. Quando o TTC cai abaixo de um certo limite, o sistema pode responder emitindo avisos, aplicando os freios ou ajustando seu caminho planejado.
Link to this sectionAplicações reais da previsão de colisões#
A previsão de colisões está se tornando crucial em muitos setores, incluindo gerenciamento de tráfego, infraestrutura de cidades inteligentes, automação industrial e robótica móvel. À medida que modelos de visão computacional e previsão de ponta continuam a avançar, esses sistemas estão se tornando mais capazes de antecipar movimentos.
Agora que temos uma compreensão melhor de como a previsão de colisões e a previsão de trajetória funcionam, vamos dar uma olhada em alguns estudos de pesquisa interessantes que mostram como esses métodos podem ser usados em vários ambientes reais.
Link to this sectionPrevisão de colisões movida a YOLO para veículos autônomos de emergência#
Navegar em ambientes lotados e imprevisíveis é um dos desafios mais difíceis para sistemas autônomos, especialmente quando pedestres se movem de maneiras que não seguem padrões claros. Veículos de emergência enfrentam esse problema ainda mais frequentemente, pois precisam se mover rapidamente em altas velocidades através de espaços públicos densos, sem depender de estradas estruturadas, marcações de faixa ou comportamento previsível de pedestres.
Nesses tipos de cenários, entender onde as pessoas estão e como podem se mover nos próximos segundos torna-se essencial para evitar acidentes. Por exemplo, um estudo de pesquisa recente explorou esse desafio construindo um pipeline de previsão de colisões completo para um Veículo Autônomo de Emergência (EAV) operando em ambientes ricos em pedestres.
Link to this sectionComo funciona o pipeline de previsão de colisões movido a YOLO#
Aqui está uma rápida visão de como essa metodologia funciona:
- Detecção de pedestres usando YOLO: Um detector baseado em YOLO identifica pedestres em cada quadro da câmera e produz caixas delimitadoras para cada pessoa visível.
- Rastreamento de movimento com ByteTrack: O algoritmo ByteTrack vincula essas detecções através dos quadros, dando a cada pedestre um ID consistente e criando um histórico de movimento que mostra como eles estão se movendo ao longo do tempo.
- Estimativa de posição no mundo real: O Mapeamento de Perspectiva Inversa (IPM) converte coordenadas de pixel 2D em posições aproximadas no plano do solo, ajudando o sistema a entender onde os pedestres estão no espaço do mundo real em relação ao veículo.
- Geração de visão aérea usando uma cGAN: Uma GAN condicional, um modelo de IA que traduz um formato de imagem para outro, cria uma representação em visão aérea da cena. Esse layout de cima para baixo torna mais fácil interpretar as posições dos pedestres e seus arredores.
- Previsão de trajetória com um modelo LSTM: Usando as posições passadas e padrões de movimento de cada pedestre, um modelo LSTM prevê para onde eles provavelmente se moverão nos próximos segundos.
- Detecção eficiente de colisões usando cones de colisão: As trajetórias previstas são comparadas usando o método de cone de colisão, que determina se os caminhos do veículo e de qualquer pedestre estão em curso de intersecção.
- Prevenção de colisões por meio de sinalização: Se o sistema prevê uma colisão, ele ativa um sinal auditivo (como uma buzina ou sino) no momento ideal. O timing é escolhido para influenciar o comportamento do pedestre e dar a ele a chance de acelerar ou desacelerar e chegar à segurança.
Link to this sectionGarantindo a segurança dos pedestres nas cidades usando visão de borda e YOLO#
Da mesma forma, outra abordagem para a prevenção de colisões olha além dos veículos e foca na própria infraestrutura. Em vez de depender de sensores dentro de um carro, esse método usa câmeras inteligentes instaladas em faixas de pedestres e cruzamentos para monitorar como pedestres e veículos se movem em tempo real. Esses locais são muitas vezes imprevisíveis; as pessoas podem entrar na estrada de repente, ciclistas podem serpentear pelo tráfego e motoristas nem sempre diminuem a velocidade, portanto, detectar riscos precocemente é vital.
Um estudo interessante explorou essa ideia através de um sistema chamado NAVIBox, um dispositivo de visão de borda projetado para prever riscos entre veículos e pedestres diretamente no cruzamento. O sistema usa o modelo Ultralytics YOLOv8 para detectar pedestres e veículos, e um rastreador de Centroid leve para segui-los através dos quadros. Isso cria históricos de movimento curtos e confiáveis, que são então refinados usando uma transformação de perspectiva que converte a visão inclinada do CCTV em um layout de visão aérea mais claro da estrada.
Com essas trajetórias refinadas, o NAVIBox pode estimar como os usuários da estrada provavelmente se moverão nos próximos segundos e verificar se seus caminhos podem se cruzar (também referido como um teste de intersecção). Quando o sistema detecta uma interação de risco, ele envia avisos imediatamente através de displays para motoristas e alto-falantes para pedestres - sem depender de um servidor remoto ou conexão de rede. Testes em locais urbanos reais mostraram que o NAVIBox funciona rápido o suficiente para uma resposta em tempo real e pode identificar com precisão cenários potenciais de colisão, tornando-o uma ferramenta de segurança prática para cruzamentos urbanos movimentados.
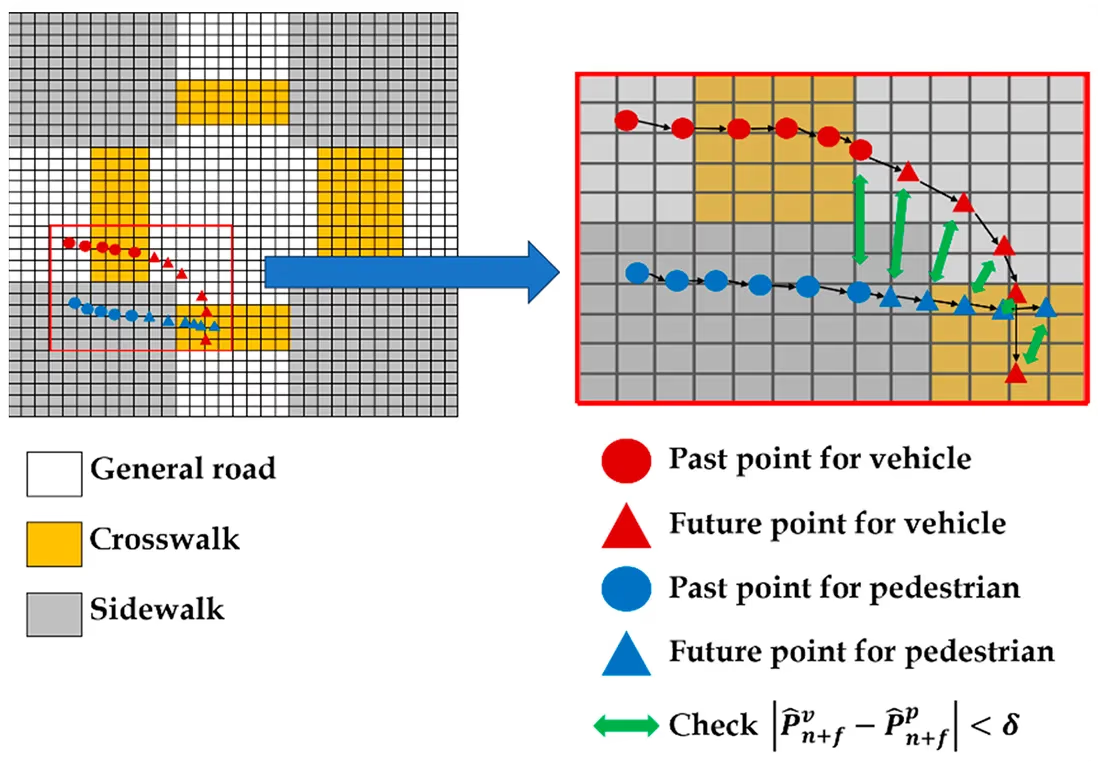
Fig 5. Prevendo o risco de colisão entre veículos e pedestres. (Fonte)
Link to this sectionPrós e contras da detecção e previsão de colisões#
Aqui estão algumas vantagens de usar sistemas preditivos de colisão baseados em IA:
-
Melhora a consciência situacional: Sistemas de IA mapeiam continuamente como os objetos se movem em um ambiente, fornecendo uma compreensão mais rica do fluxo de multidões em grande escala, comportamento do tráfego ou trajetórias de máquinas.
-
Insights baseados em dados para planejamento de longo prazo: Ao registrar detecções, quase acidentes e padrões de movimento, sistemas de IA fornecem análises que planejadores urbanos, equipes de segurança e operadores de frota podem usar para redesenhar cruzamentos, melhorar a sinalização ou refinar políticas operacionais.
-
Prevenção de riscos com bom custo-benefício: Ao detectar riscos antes que se transformem em problemas, esses sistemas tornam possível evitar acidentes dispendiosos, sinistros de seguro ou reparos de equipamentos.
Apesar de seus benefícios, sistemas livres de colisão também enfrentam certas limitações. Aqui estão alguns desafios a considerar:
- Restrições de posicionamento de sensores e câmeras: Câmeras mal posicionadas ou anguladas podem distorcer o tamanho ou a distância do objeto, tornando a estimativa de profundidade e a previsão de trajetória menos confiáveis.
- Oclusão: Objetos podem ficar parcial ou totalmente ocultos atrás de outros. Isso torna o rastreamento de objetos difícil, já que o modelo perde a continuidade visual.
- Condições ambientais: Baixa iluminação, luz solar intensa, chuva, neblina ou baixa qualidade da câmera podem reduzir a capacidade do modelo de ver a cena claramente, afetando a precisão.
Link to this sectionPrincipais pontos#
A previsão de colisões reúne duas capacidades poderosas: visão computacional, que permite que os sistemas entendam o que está acontecendo no ambiente agora, e previsão de trajetória, que ajuda a antecipar o que provavelmente acontecerá a seguir.
Ao combinar essas forças, máquinas podem detectar objetos em movimento em tempo real e prever como esses objetos podem interagir nos segundos seguintes. À medida que as técnicas de visão computacional e previsão continuam a evoluir, a previsão de colisões provavelmente se tornará fundamental para construir sistemas autônomos mais seguros, confiáveis e escaláveis.
Confira nossa comunidade e repositório no GitHub para saber mais sobre IA. Explore aplicações como IA na saúde e visão computacional na fabricação em nossas páginas de soluções. Descubra nossas opções de licenciamento e comece a construir hoje!






