Melhorando a previsão da trajetória da bola usando IA de visão
Saiba como a IA de visão melhora a previsão da trajetória da bola e possibilita insights em tempo real para esportes, robótica e outras aplicações inteligentes.

Quando o teu jogador de basquete favorito faz um arremesso, tu muitas vezes consegues dizer se ele vai entrar na cesta ou errar. Como ser humano, tu consegues prever isso porque provavelmente já viste vários jogos de basquete e sabes o que esperar. Agora, imagina uma máquina a ver um jogo de basquete através de uma câmera, a tentar descobrir se o arremesso vai entrar na cesta.
É muito mais complicado. Replicar a inteligência visual que desenvolvemos através da experiência não é tão simples como parece. Na verdade, a previsão de trajetória de bola é uma área de pesquisa fascinante que explora como as máquinas podem analisar o movimento, o giro e o ângulo para prever onde uma bola vai aterrar.

Fig 1. Trajetória de um arremesso de basquete. (Fonte)
Já em 1537, o matemático italiano Niccolò Tartaglia descobriu que uma bala de canhão viaja mais longe quando disparada a um ângulo de 45 graus. As suas descobertas construíram a base para como entendemos o movimento e a previsão hoje.
Agora, com os avanços na ciência da computação e inteligência artificial (IA), as máquinas podem prever a trajetória de uma bola com precisão e em tempo real. Ao analisar detalhes como a posição, velocidade, giro e ângulo da bola, os sistemas de IA podem prever onde ela vai aterrar. Isto ajuda em aplicações que variam desde o treino de jogadores e análise de desempenho até à saúde e robótica.
Em particular, a visão computacional é um campo da IA que ajuda as máquinas a interpretar e entender informações visuais do mundo ao seu redor. É o que permite aos sistemas reconhecer objetos, rastrear o seu movimento e dar sentido ao que veem através de câmeras ou vídeo.
Quando aplicado à previsão de trajetória de bola, modelos de visão computacional como o Ultralytics YOLO11 e o Ultralytics YOLO26 podem ajudar um sistema a detectar e rastrear a bola quadro a quadro. Estes dados visuais fornecem informações precisas sobre a posição da bola em cada quadro, que podem então ser usadas para estimar a sua velocidade e direção ao longo do tempo. Modelos de IA e vários algoritmos podem então usar estes dados para prever para onde a bola irá a seguir.
Neste artigo, vamos explorar a previsão de trajetória de bola, as várias abordagens envolvidas e o papel da visão computacional. Vamos começar!
Link to this sectionA importância da previsão de trajetória de bola#
Além de ser uma área de pesquisa interessante, a previsão de trajetória de bola está a impulsionar o desenvolvimento de tecnologia prática e impactante em muitos campos. Por exemplo, em veículos autônomos, a previsão de trajetória permite que os carros antecipem os caminhos futuros de outros veículos, ciclistas e pedestres. Ao prever onde esses objetos em movimento provavelmente estarão nos próximos segundos, os sistemas de condução autônoma podem tomar decisões mais seguras e eficientes ajustando a velocidade, mudando de faixa ou evitando potenciais colisões com antecedência.
Da mesma forma, na robótica, a previsão de trajetória de bola torna possível que as máquinas detectem, rastreiem e reajam a objetos em movimento com alta precisão. Isto é especialmente útil em sistemas automatizados que precisam de lidar com itens que se movem rapidamente em tempo real, como robôs industriais ou drones de entrega.
Link to this sectionUma visão geral de como funciona a previsão de trajetória de bola#
Então, como funciona realmente a previsão da trajetória de uma bola? Depende do método usado. Em geral, cada abordagem visa fazer a mesma coisa: entender como a bola se move agora e prever para onde ela irá a seguir.
Aqui tens um vislumbre de algumas das diferentes abordagens utilizadas:
- Modelagem baseada em física: Esta abordagem usa as leis do movimento e aerodinâmica para calcular como fatores como velocidade, ângulo de lançamento, gravidade e resistência do ar afetam a trajetória de voo da bola.
- Modelos de aprendizado de máquina: Estes modelos analisam grandes conjuntos de dados de movimento para aprender padrões de como uma bola se move, permitindo que façam previsões precisas sem depender de equações físicas explícitas.
- Previsão baseada em visão computacional: Este método usa filmagens de vídeo para detectar e rastrear a bola quadro a quadro, produzindo dados visuais que ajudam os algoritmos a estimar a sua velocidade, direção e posição futura.
- Sistemas baseados em sensores: Estes sistemas usam dados de sensores de movimento, radar ou câmeras infravermelhas para medir com precisão a posição, velocidade e giro da bola em tempo real.
- Métodos híbridos: Eles combinam duas ou mais técnicas. Por exemplo, integrar a visão computacional com a modelagem baseada em física para obter previsões de trajetória mais precisas e confiáveis.
A seguir, vamos analisar mais de perto como funciona a previsão de trajetória de bola baseada em visão computacional e os algoritmos que a tornam possível.
Link to this sectionO básico da previsão de trajetória de bola#
Antes de olharmos para como a visão computacional desempenha um papel na previsão de trajetória de bola e como esses sistemas funcionam, vamos decompor o básico.
A previsão de trajetória de bola geralmente envolve duas partes principais: rastreamento e modelagem de movimento. Os algoritmos de rastreamento são usados para seguir a bola quadro a quadro em um vídeo, estimando onde ela aparecerá a seguir. Estes métodos são úteis para previsões de curto prazo em tempo real.
Por outro lado, os métodos de modelagem de movimento (tipicamente envolvendo física ou aprendizado de máquina) vão um passo além. Eles visam prever o caminho completo da bola, incluindo onde ela irá aterrar.
Simplificando, o rastreamento determina a posição e o movimento atuais da bola, enquanto a modelagem usa essa informação para estimar o seu caminho futuro e ponto de aterragem. Juntos, eles permitem uma previsão precisa e em tempo real da trajetória da bola.
Link to this sectionUm olhar mais atento ao rastreamento e à modelagem de movimento#
Tu podes estar a perguntar-te por que a distinção entre rastreamento e previsão é importante. À medida que exploramos este tópico mais a fundo, notarás que muitos algoritmos de rastreamento não rastreiam apenas. Eles também fazem previsões de curto prazo sobre onde a bola aparecerá a seguir.
Por exemplo, modelos de visão computacional como o YOLO11, que suportam rastreamento de objetos através de algoritmos de rastreamento como ByteTrack ou SORT, usam dados de detecção de cada quadro de vídeo para estimar a próxima posição da bola em tempo real. Isto ajuda o sistema a manter um rastreamento preciso mesmo quando a bola se move rapidamente ou fica parcialmente oculta.
No entanto, embora estes modelos sejam ótimos a seguir o movimento, eles geralmente preveem apenas a próxima posição da bola, em vez de toda a sua trajetória de voo ou ponto de aterragem. É aí que os métodos de modelagem de movimento se tornam essenciais.
Por outras palavras, um modelo de visão computacional por si só não pode prever totalmente a trajetória de uma bola. Ele pode detectar e rastrear a posição da bola quadro a quadro, mas não leva em conta as forças físicas que influenciam o seu movimento, como gravidade, giro, arrasto ou resistência do ar.
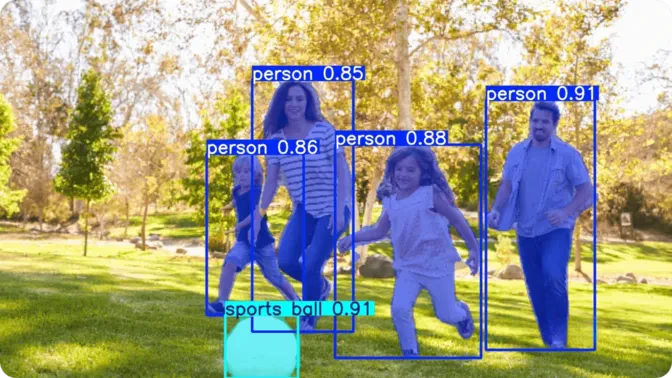
Fig 2. Um exemplo de detecção e segmentação de bola usando YOLO11. (Fonte)
Para fazer previsões precisas a longo prazo, os dados visuais da visão computacional são frequentemente combinados com métodos de modelagem de movimento. Estes métodos usam equações baseadas em física ou algoritmos de aprendizado de máquina para analisar o movimento da bola ao longo do tempo e prever o seu caminho completo, incluindo onde ela irá aterrar.
Link to this sectionAlgoritmos comuns usados para rastreamento de bola em visão computacional#
Os algoritmos de rastreamento são uma parte crucial dos sistemas de previsão de trajetória de bola. Eles estimam a posição e o movimento da bola ao longo do tempo enquanto lidam com desafios como a oclusão breve (quando a bola fica temporariamente escondida da vista por outro objeto).
A seguir, vamos percorrer alguns algoritmos de rastreamento comuns.
Link to this sectionFiltro de Kalman#
O Filtro de Kalman é um algoritmo matemático usado para estimar a posição e a velocidade de um objeto ao longo do tempo, mesmo quando as medições são ruidosas ou incompletas. A NASA, por exemplo, tem usado Filtros de Kalman para rastrear e reconstruir os caminhos de veículos de voo.
Ao combinar dados de sensores com modelos de movimento do veículo, o sistema pode limpar dados ruidosos, reconstruir com precisão a trajetória de voo real e fazer previsões de curto prazo sobre para onde o veículo irá a seguir. Isto torna os filtros muito úteis para rastreamento e controle em tempo real em muitos campos.
Embora o Filtro de Kalman em si não seja um algoritmo de visão computacional, é comumente usado em sistemas baseados em visão para rastrear objetos em movimento, como uma bola, através de quadros de vídeo. Funciona prevendo onde o objeto aparecerá a seguir, comparando essa previsão com os dados de detecção reais e, em seguida, atualizando a sua estimativa para permanecer preciso. Este ciclo contínuo de previsão e correção torna-o eficaz para o rastreamento em tempo real, mesmo quando o objeto desaparece brevemente da vista ou muda de velocidade subitamente.
Link to this sectionByteTrack#
ByteTrack é um algoritmo de rastreamento de objetos em tempo real usado para seguir objetos em movimento, como bolas, através de quadros de vídeo. Funciona detectando objetos em cada quadro e vinculando detecções do mesmo objeto ao longo do tempo, criando uma sequência contínua chamada tracklet.
Um tracklet é uma curta série de quadros que mostra onde o objeto esteve e como se move. Este processo de vinculação ajuda o sistema a manter uma identidade consistente para cada objeto durante todo o vídeo.
Ao contrário dos métodos de rastreamento mais antigos que descartam detecções de baixa confiança, o ByteTrack mantém-nas e verifica-as novamente. Isto significa que pode manter um rastreamento suave e estável mesmo quando os objetos se movem rapidamente, ficam desfocados ou estão brevemente ocultos. Embora o ByteTrack não seja um detector de objetos por si só, é frequentemente usado em conjunto com modelos de visão computacional como o Ultralytics YOLOv8 ou YOLO11 para rastrear objetos com precisão e confiabilidade em tempo real.
Link to this sectionBoT-SORT#
BoT-SORT é um algoritmo avançado de rastreamento de múltiplos objetos que melhora a forma como os sistemas seguem objetos em movimento através de quadros de vídeo. Ele baseia-se no ByteTrack e adiciona funcionalidades importantes como compensação de movimento da câmera e reidentificação de objetos.
A compensação de movimento da câmera ajuda a corrigir o movimento da câmera, como panorâmica ou vibração, enquanto a reidentificação permite que o sistema reconheça e continue a rastrear o mesmo objeto mesmo depois de ele sair e reaparecer na vista. Assim como o ByteTrack, também é usado em combinação com modelos como YOLOv8 ou YOLO11.
Link to this sectionMétodos comuns de previsão de trajetória#
Agora que vimos como funciona o rastreamento e como ele se conecta à previsão da trajetória de uma bola, vamos analisar mais de perto os principais tipos de algoritmos de previsão de trajetória e métodos usados para estimar o movimento de uma bola.
Link to this sectionModelagem cinemática baseada em física#
A modelagem cinemática baseada em física prevê a trajetória de uma bola usando as leis básicas do movimento. Considera fatores como a velocidade inicial da bola, ângulo de lançamento, gravidade, resistência do ar e giro para calcular a sua trajetória de voo. Ao combinar estes fatores, o modelo estima onde a bola estará, com que rapidez se moverá e em que direção a qualquer momento.
Por exemplo, em esportes como beisebol ou golfe, ajuda a prever quão longe e em que direção a bola viajará com base na velocidade do swing e no ângulo de lançamento. Embora seja altamente preciso em ambientes controlados, pode ter dificuldades com condições imprevisíveis do mundo real, como vento, ressaltos ou interações dos jogadores, e causar erros de previsão.
Quando combinados com visão computacional, os métodos baseados em modelos físicos permitem aplicações práticas em análise esportiva e arbitragem. O Hawk-Eye, por exemplo, é um sistema de visão multi-câmera que reconstrói a trajetória 3D de uma bola em tempo real.
Ele usa várias câmeras de alta velocidade sincronizadas para capturar a posição da bola de múltiplos ângulos e aplica triangulação, equações cinemáticas e métodos de interpolação para estimar o seu caminho. Esta integração suporta rastreamento preciso e tomada de decisão em esportes, incluindo tênis, críquete e futebol, onde a precisão da trajetória é essencial para a marcação de linhas e análise de desempenho.
Link to this sectionModelos de regressão de aprendizado de máquina#
Os modelos de regressão de aprendizado de máquina podem prever a posição ou trajetória futura de uma bola sem depender de equações físicas explícitas. Em vez disso, eles aprendem padrões a partir de dados como posição, velocidade, giro e ângulo coletados através de sistemas de rastreamento baseados em vídeo ou sensores.
Quando combinados com algoritmos de rastreamento de visão computacional, o sistema de visão captura a posição da bola através dos quadros de vídeo. Estes dados posicionais tornam-se a entrada para o modelo de regressão, que aprende como o movimento da bola muda ao longo do tempo. Uma vez treinado, o modelo pode prever a próxima posição ou trajetória geral da bola com base no que já observou.
Por exemplo, em relação a robôs de tênis de mesa ou sistemas robóticos de ping pong, modelos de regressão treinados em milhares de trajetórias rastreadas demonstraram prever os padrões de voo e salto da bola em tempo real. Isto permite que o robô se posicione ou reaja rapidamente para apanhar ou devolver a bola de ping pong ou tênis de mesa. Como estes modelos aprendem diretamente a partir de exemplos do mundo real, eles lidam frequentemente com efeitos imprevisíveis, como giro, arrasto do ar ou contato com a superfície, melhor do que métodos puramente baseados em física.
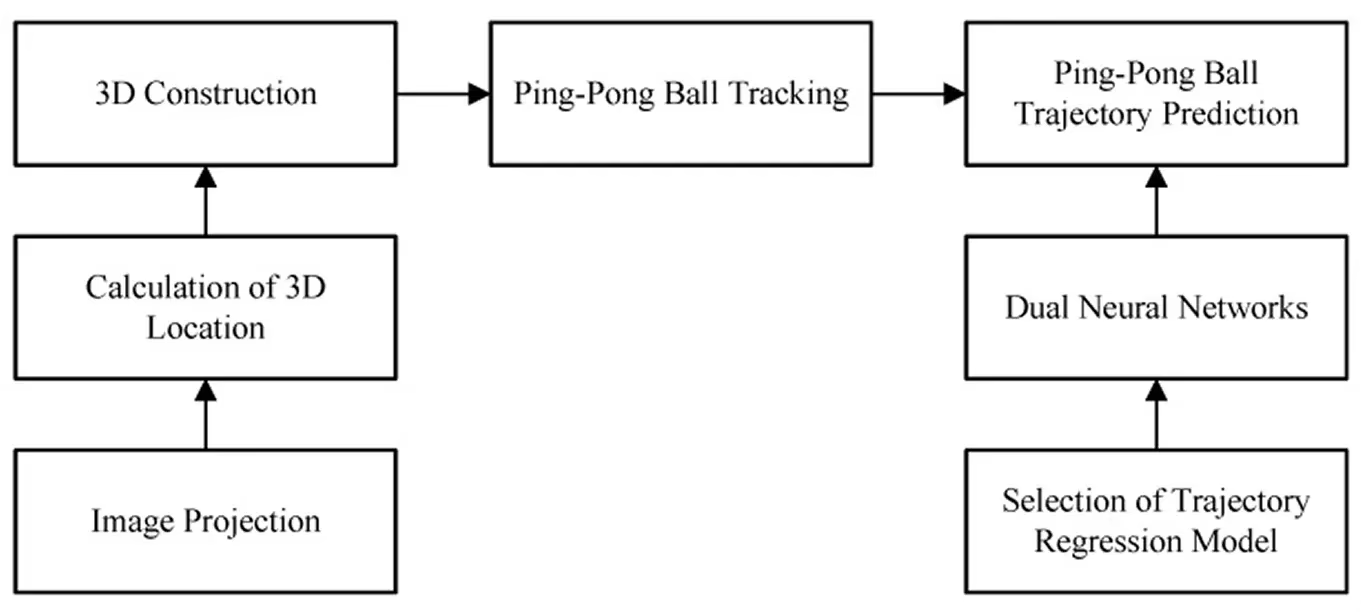
Fig 3. Como um robô de ping pong prevê a trajetória de uma bola. (Fonte)
Link to this sectionRedes Neurais Recorrentes (RNNs) e redes de Memória de Longo Curto Prazo (LSTMs)#
Redes Neurais Recorrentes (RNNs) e redes de Memória de Longo Curto Prazo (LSTMs) são modelos de IA projetados para processar dados que mudam ao longo do tempo, como movimento ou outras informações de séries temporais. Elas podem lembrar o que aconteceu anteriormente, o que as ajuda a reconhecer padrões de movimento e prever o que pode acontecer a seguir.
Na previsão de trajetória de bola, estes modelos aprendem como as posições, velocidades e giros passados de uma bola influenciam para onde ela irá a seguir. Quando combinados com visão computacional e rastreamento de objetos, um sistema de visão pode capturar as posições da bola através dos quadros. Uma RNN pode então usar esta sequência de posições para prever o próximo movimento ou o caminho completo da bola.
Além disso, as LSTMs são especialmente impactantes porque podem lembrar informações por períodos mais longos. Isso permite-lhes seguir o movimento completo de uma bola mesmo quando ela se move rapidamente ou muda de direção.
Pesquisas recentes levaram esta ideia um passo adiante. Cientistas desenvolveram modelos hierárquicos Bi-LSTM que podem prever trajetórias de bola em esportes de equipe ao analisar como os jogadores se movem e interagem uns com os outros. Estes modelos podem até estimar a posição da bola quando ela está temporariamente escondida ou fora de vista, usando padrões no comportamento dos jogadores para inferir onde a bola tem mais probabilidade de estar.
Link to this sectionAplicações no mundo real da previsão de trajetória de bola#
Com uma melhor compreensão da visão computacional e da previsão de trajetória de bola, vamos explorar as suas aplicações práticas em áreas como esportes, reabilitação e robótica.
Link to this sectionPrevisão de trajetória de bola em esportes#
Entender como uma bola se move e onde ela irá aterrar é crucial em muitos esportes. Usando informações de câmeras e sensores, modelos de IA podem prever o caminho e a velocidade inicial da bola, ajudando as equipes esportivas a antecipar jogadas, melhorar técnicas e tomar decisões mais inteligentes.
Também apoia o treino de jogadores analisando fatores como giro ou ângulo de liberação, ajudando os atletas a melhorar o desempenho e evitar lesões. Muitos sistemas de treino esportivo de ponta usam agora a previsão de trajetória de bola para aprimorar o desenvolvimento de habilidades e estratégia.
Por exemplo, pesquisadores desenvolveram um sistema de visão computacional para robôs de tênis que pode detectar e prever o caminho de uma bola de tênis. Usando câmeras estéreo e redes neurais convolucionais, o sistema ajuda o robô a ver a bola em três dimensões (eixo x, eixo y e eixo z) e a responder com mais precisão durante o jogo. Esta pode ser uma ferramenta revolucionária para treinar jogadores para competições.
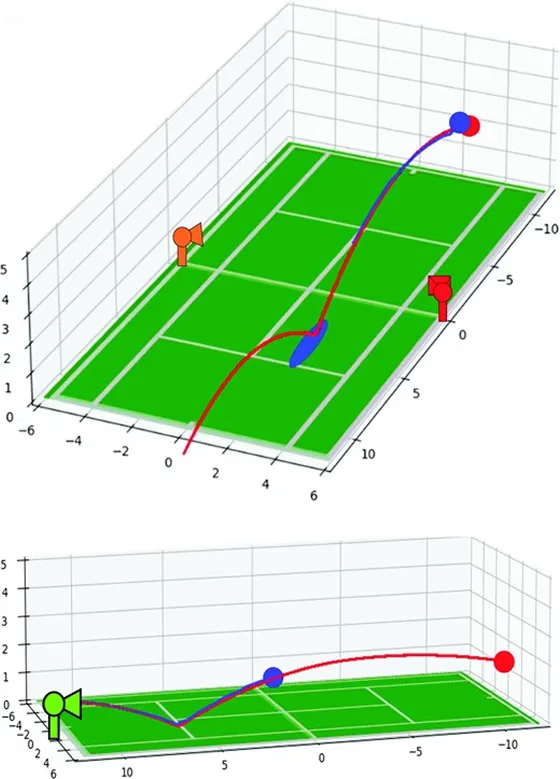
Fig 4. O vermelho mostra o caminho simulado; o azul mostra a previsão de trajetória de bola do robô. (Fonte)
Link to this sectionPrós e contras da previsão de trajetória de bola baseada em visão computacional#
Aqui estão algumas vantagens chave de usar sistemas de previsão de trajetória de bola baseados em visão computacional:
- Previsão em tempo real: Estes sistemas podem prever com precisão o caminho futuro de uma bola instantaneamente, mesmo a altas velocidades.
- Não invasivo: Eles podem operar apenas com entrada de vídeo, sem necessidade de sensores físicos ou marcadores.
- Escalável e adaptável: Os sistemas de previsão de trajetória de bola baseados em visão podem ser aplicados em diferentes esportes e ambientes usando configurações de câmera padrão.
Embora a previsão de trajetória de bola baseada em visão computacional tenha muitos benefícios, existem também algumas limitações a considerar. Aqui estão alguns fatores a ter em mente:
- Desafios de oclusão: As previsões podem frequentemente tornar-se menos precisas quando uma bola está escondida atrás de jogadores ou outros objetos.
- Problemas de iluminação e visibilidade: O desempenho desses sistemas pode ser baixo sob iluminação precária ou fundos complexos, como à noite.
- Alta demanda computacional: O processamento de vídeo de alta taxa de quadros e modelos de aprendizado profundo requer hardware potente que pode ser dispendioso.
Link to this sectionPrincipais pontos#
Prever a trajetória de uma bola com IA de visão reúne física, visão computacional e aprendizado de máquina para entender e prever o movimento com notável precisão. Desde a análise do desempenho esportivo até o auxílio na recuperação de pacientes e sistemas de automação industrial, a previsão de trajetória transforma dados visuais em insights acionáveis. À medida que a tecnologia continua a avançar, ela abre caminho para métodos mais inteligentes, rápidos e adaptáveis que melhoram o desempenho, a segurança e a tomada de decisões.
Faz parte da nossa comunidade em crescimento e explora o nosso repositório no GitHub para recursos práticos de IA. Para construir com IA de visão hoje, explora as nossas opções de licenciamento. Aprende como a IA na agricultura está a transformar a agricultura e como a IA de visão na robótica está a moldar o futuro visitando as nossas páginas de soluções.






