Görüntü işlemede kenar algılamayı anlama
Görüntü işlemede kenar algılama. Kenarları doğru bir şekilde tespit etmek ve sağlam bir kenar tanıma elde etmek için Sobel, Canny ve diğer kenar algılama algoritmalarını öğren.
İnsanlar olarak bir görüntüye baktığımızda nesnelerin kenarlarını doğal bir şekilde tanır, kıvrımlarını takip eder ve yüzeylerindeki dokuları fark ederiz. Ancak bir bilgisayar için anlama süreci, tek tek pikseller düzeyinde başlar.
Dijital bir görüntünün en küçük birimi olan piksel, tek bir noktadaki renk ve parlaklık bilgisini depolar. Bir bilgisayar, bu piksel değerlerindeki değişimleri görüntü boyunca takip ederek önemli detayları ortaya çıkaran desenleri tespit edebilir.
Özellikle görüntü işleme, temel özellikleri vurgulamak ve dikkat dağıtıcı unsurları kaldırmak için piksel verilerini kullanır. Yaygın bir görüntü işleme tekniği olan kenar algılama; nesnelerin ana hatlarını belirlemek, sınırları işaretlemek ve yapı eklemek için parlaklık veya rengin keskin bir şekilde değiştiği noktaları tanımlar.
Bu, bilgisayarların şekilleri ayırmasını, boyutları ölçmesini ve bir sahnedeki parçaların nasıl bağlandığını yorumlamasını sağlar. Kenar algılama genellikle gelişmiş görüntü analizi çalışmalarında ilk adımdır.
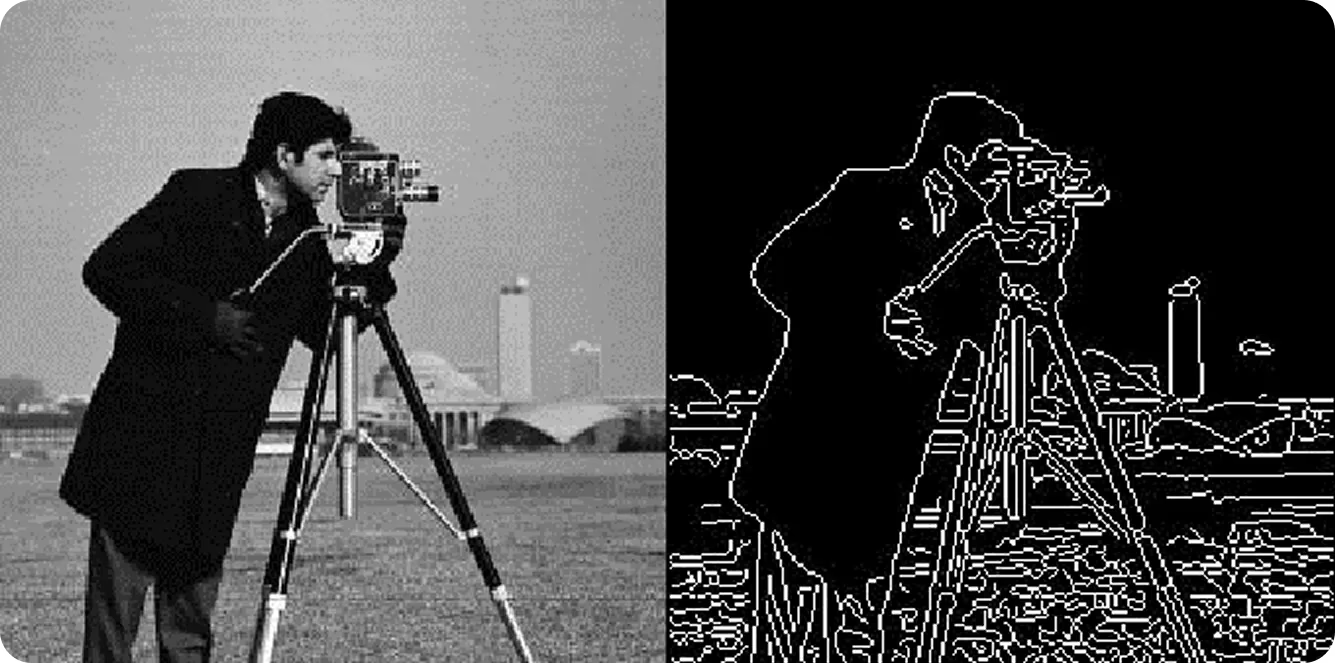
Şekil 1. Orijinal görüntüyü ve farklı kenar algılama yöntemlerinden alınan çıktıları gösteren örnek. (Kaynak)
Bu makalede kenar algılamanın ne olduğuna, nasıl çalıştığına ve gerçek dünyadaki uygulamalarına göz atacağız. Hadi başlayalım!
Link to this sectionKenar algılama kavramları#
Kenar algılama, bir görüntüde parlaklığın veya rengin bir noktadan diğerine belirgin şekilde değiştiği yerleri aramaya odaklanır. Değişim küçükse alan pürüzsüz görünür. Değişim keskinse, genellikle iki farklı bölge arasındaki sınırı işaret eder.
Bu piksel değişimlerinin gerçekleşme nedenlerinden bazıları şunlardır:
- Yüzey normali süreksizlikleri: İki yüzey bir duvarda veya bir kutunun kenarında olduğu gibi bir açıyla birleştiğinde, yönelimdeki bu keskin değişim görüntüde net bir sınır oluşturur.
- Derinlik süreksizlikleri: Bunlar, nesnelerin kameradan farklı mesafelerde olduğu yerlerde görünür ve sistemin onları ayırt etmesine yardımcı olan gözle görülür bir ayrım oluşturur.
- Yüzey rengi veya doku değişiklikleri: Bu, bir alanın bitişik alandan farklı bir renge veya dokuya sahip olduğu durumlarda meydana gelir ve görünür bir ayrım yaratır.
- Aydınlatma değişiklikleri: Yüzeylerin kendisi pürüzsüz veya sürekli olsa bile, gölgeler veya vurgular dahil olmak üzere aydınlatma değişikliklerinden kaynaklanır ve görünür ayrımlar yaratır.
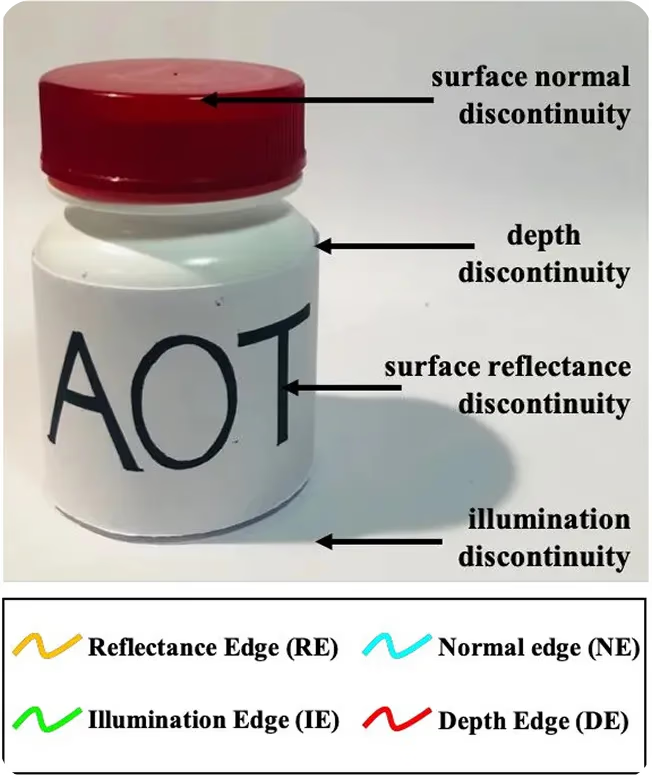
Şekil 2. Görüntülerdeki farklı kenar süreksizliği türleri. (Kaynak)
Link to this sectionKenar algılama tanıma nasıl çalışır#
Kenar algılama genellikle renkli bir görüntünün gri tonlamalı bir görüntüye dönüştürülmesiyle başlar, böylece her nokta yalnızca parlaklığı gösterir. Bu, algoritmanın renkten ziyade aydınlık ve karanlık farklarına odaklanmasını kolaylaştırır.
Ardından, özel filtreler parlaklığın aniden değiştiği yerleri bulmak için görüntüyü tarayabilir. Bu filtreler, gradyan adı verilen parlaklığın ne kadar dik değiştiğini hesaplar. Daha yüksek bir gradyan, yakın noktalar arasındaki daha büyük bir farktan kaynaklanır ve bu da genellikle bir kenara işaret eder.
Algoritma daha sonra görüntüyü iyileştirmeye devam eder, küçük detayları kaldırır ve yalnızca en önemli çizgiler ile şekilleri tutar. Sonuç, daha ileri analizler için kullanılabilecek net bir ana hat ve çıktı görüntüsüdür.
Link to this sectionKenar algılama ve görüntü işlemenin evrimi#
Kenar algılamayı daha ayrıntılı incelemeden önce zaman içinde nasıl geliştiğini tartışalım.
Görüntü işleme, resimleri temizlemek ve iyileştirmek için eşikleme ve filtreleme gibi basit, kural tabanlı yöntemlerle başladı. Analog çağda bu, detayları ortaya çıkarmak için optik filtreler, büyüteçler veya kimyasal işlemler kullanılarak fotoğraflar veya filmler üzerinde çalışmak anlamına geliyordu.
Kontrast ayarı, gürültü azaltma, görüntü yoğunluğunu ayarlama ve temel kenar algılama gibi teknikler, giriş görüntülerinin daha net hale getirilmesine ve şekiller ile dokuların vurgulanmasına yardımcı oldu. 1960'larda ve 70'lerde analogdan dijital işlemeye geçiş, astronomi, tıbbi görüntüleme ve uydu izleme gibi alanlarda modern analizlerin önünü açtı.
1980'lere ve 90'lara gelindiğinde, daha hızlı bilgisayarlar özellik çıkarma, şekil algılama ve temel nesne tanıma gibi daha karmaşık görevlerin üstesinden gelmeyi mümkün kıldı. Sobel operatörü ve Canny gibi algoritmalar daha hassas kenar algılama sunarken, desen tanıma endüstriyel otomasyondan optik karakter tanıma yoluyla basılı metin okumaya kadar her alanda uygulama buldu.
Link to this sectionyüzyılda kenar algılama ve bilgisayarlı görü#
Bugün teknolojideki istikrarlı ilerlemeler, bilgisayarlı görü alanının gelişmesine yol açtı. Vizyon AI veya bilgisayarlı görü, makinelere görsel bilgileri yorumlamayı ve anlamayı öğretmeye odaklanan bir AI dalıdır.
Çift eşikleme (güçlü kenarları koruyup zayıf olanları kaldırarak görüntüleri daha net hale getiren) ve kenar algılama gibi geleneksel görüntü işleme yöntemleri sabit kuralları takip eder ve yalnızca belirli görevleri yerine getirebilirken; bilgisayarlı görü, örneklerden öğrenebilen ve yeni durumlara uyum sağlayabilen veri odaklı modelleri kullanır.
Günümüzde görüntüleme sistemleri, görüntüleri iyileştirmenin veya kenarları tespit etmenin çok ötesine geçmektedir. Nesneleri tanıyabilir, hareketi takip edebilir ve tüm sahnenin bağlamını anlayabilirler.
Bunu mümkün kılan temel tekniklerden biri konvolüsyondur. Konvolüsyon işlemi, küçük filtrelerin (çekirdekler olarak da adlandırılır) kenarlar, köşeler ve dokular gibi önemli desenleri bulmak için görüntüyü taradığı bir süreçtir. Bu desenler, bilgisayarlı görü modellerinin nesneleri tanımak ve anlamak için kullandığı yapı taşları haline gelir.
Örneğin, Ultralytics YOLO11 gibi bilgisayarlı görü modelleri, örnek segmentasyonu gibi gelişmiş görevleri gerçekleştirmek için bu konvolüsyon tabanlı özellikleri kullanır. Bu, kenar algılama ile yakından ilişkilidir çünkü örnek segmentasyonu, görüntüdeki her bir nesnenin sınırlarının doğru bir şekilde ana hatlarıyla belirtilmesini gerektirir.
Kenar algılama, nesne kenarlarını işaretlemek için kenar piksellerindeki yoğunluk değişimlerini bulmaya odaklanırken; örnek segmentasyonu, kenarları tespit etmek, sınıflandırmak ve her nesneyi kendi bölgesine ayırmak için bu fikrin üzerine inşa edilir.

Şekil 3. YOLO11 ve örnek segmentasyonu kullanımına bir bakış. (Kaynak)
Link to this sectionKenar algılama algoritmaları ve yaklaşımları#
Bilgisayarlı görüdeki büyümeye rağmen görüntü işleme, birçok uygulamada hala önemli bir parçadır. Bunun nedeni, bilgisayarlı görünün genellikle temel görüntü ön işleme adımları üzerine inşa edilmesidir.
Sistemler nesneleri tespit etmeden veya bir sahneyi anlamadan önce genellikle görüntüyü temizler, gürültüyü azaltır ve önemli detayları öne çıkarmak için kenarları bulur. Bu adımlar, gelişmiş modelleri daha doğru ve verimli hale getirir.
Şimdi kenarları tespit etmek için kullanılan en yaygın görüntü işleme algoritmalarından bazılarını ve bunların nasıl çalıştıklarını inceleyelim.
Link to this sectionSobel kenar algılama#
Sobel kenar algılama, bir görüntüdeki nesnelerin ana hatlarını bulmak için kullanılan önemli bir yöntemdir. Her detayı aynı anda analiz etmek yerine, parlaklığın bir pikselden komşu piksele keskin bir şekilde değiştiği alanlara odaklanır.
Bu ani değişimler genellikle bir nesnenin bittiği ve diğerinin başladığı veya bir nesnenin arka planla karşılaştığı noktayı işaret eder. Sobel, bu kenarları izole ederek karmaşık bir görüntüyü, hareket takibi, şekil algılama veya nesne tanıma gibi görevler için diğer sistemlerin işlemesini kolaylaştıran daha temiz bir ana hatta dönüştürür.
Sobel kenar algılamayı, görüntü boyunca yoğunluğun nasıl değiştiğini ölçen bir gradyan dedektörü olarak düşünebilirsin. Özünde bu, konvolüsyon işlemiyle çalışır: çekirdek adı verilen küçük matrisleri görüntü üzerinde kaydırır ve komşu piksel değerlerinin ağırlıklı toplamlarını hesaplar.
Bu çekirdekler, yatay ve dikey yönlerdeki parlaklık değişimlerini vurgulamak için tasarlanmıştır. Çekirdeklerin verilerden öğrenildiği derin öğrenme modellerinin aksine Sobel, kenarları eğitim gerektirmeden verimli bir şekilde vurgulamak için sabit çekirdekler kullanır.
Sobel kenar algılama yönteminin nasıl çalıştığına daha yakından bakalım:
- İki adet 3×3 filtre kullanma: Bu yöntem, filtre adı verilen iki küçük 3×3 ızgara kullanır. Bunları görüntünün üzerinde yatay (x-yönü) ve dikey yönlerde kayan şablonlar gibi düşün. Bir ızgara yatay kenarları, diğeri ise dikey kenarları bulmak için tasarlanmıştır.
- Gradyan hesaplama: Her filtre, parlaklığın ne kadar hızlı değiştiğini ve gradyan yönünü bulur. Büyük bir değişim, olası bir kenar anlamına gelir.
- Sonuçları birleştirme: Yatay ve dikey sonuçlar, her pikseldeki genel kenar gücünü ve yönünü belirlemek için birleştirilir.
- Kenarları tespit etme: Yüksek gradyan büyüklüğüne sahip pikseller, güçlü kenarlar olarak işaretlenir.
- Sınırların ana hatlarını belirleme: Bu kenarlar, nesne şekillerini tanımlamaya ve görüntüdeki farklı bölgeleri ayırmaya yardımcı olur.
Şekil 4. Sobel kenar algılama, bir giriş görüntüsünün ana hatlarını vurgulayabilir ve bir kenar haritası oluşturabilir. (Kaynak)
Link to this sectionCanny kenar algılama#
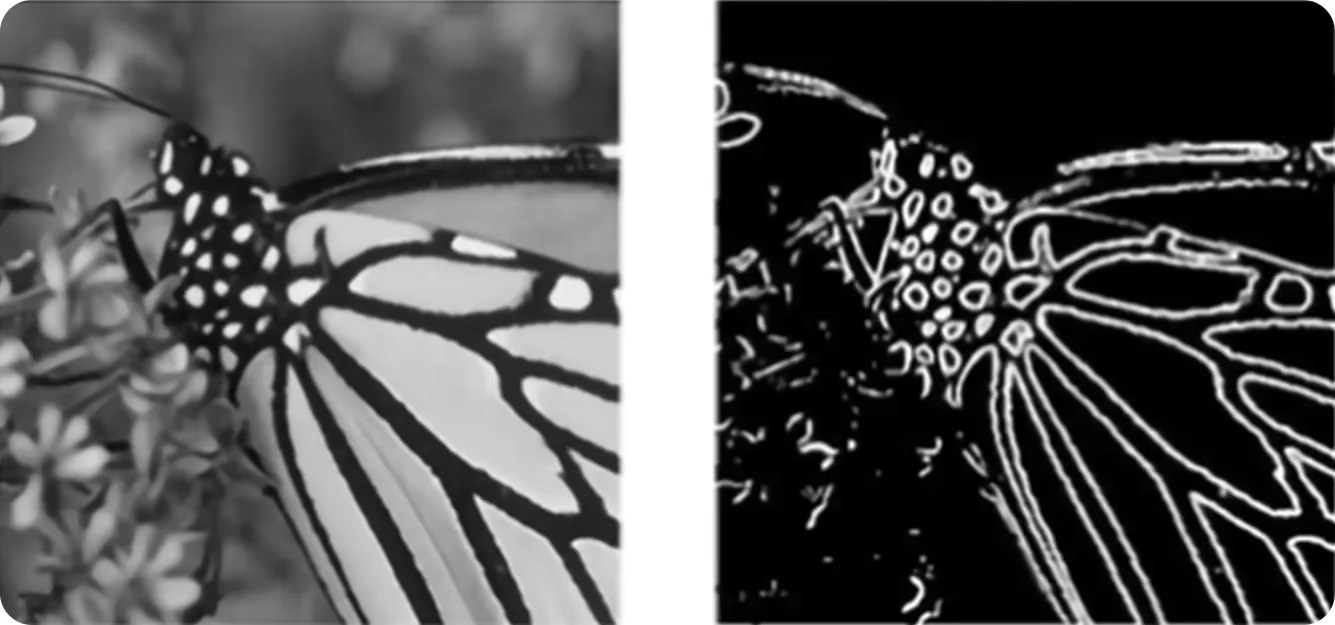
Canny kenar algılama, bir görüntüdeki kenarları bulmak için kullanılan bir başka popüler yöntemdir. Temiz ve hassas ana hatlar üretmesiyle bilinir. Temel kenar algılama tekniklerinin aksine gürültüyü filtrelemek, sınırları keskinleştirmek ve en önemli kenarlara odaklanmak için dikkatlice tasarlanmış bir dizi adımı izler.
Canny kenar dedektörünün nasıl çalıştığına dair kısa bir genel bakış:
- Görüntüyü yumuşatma: Görüntü ilk olarak, gürültüyü ve kenar sanılabilecek küçük detayları azaltan bir yumuşatma tekniği olan Gaussian filtresiyle bulanıklaştırılır.
- Parlaklık değişimlerini tespit etme: Algoritma daha sonra bu değişimlerin gücünü ve yönünü ölçmek için gradyan hesaplamalarını kullanarak parlaklıktaki keskin değişimleri tarar.
- Kenarları inceltme: Tespit edilen her çizgi boyunca yalnızca en güçlü noktalar tutulurken daha zayıf noktalar kaldırılır, sonuçta net ve temiz kenarlar elde edilir.
- Kenarları sınıflandırma: Her piksel, parlaklık değişiminin eşik değerlerine göre güçlü, zayıf veya kenar değil şeklinde etiketlenir.
- Son temizlik: Güçlü kenarlara bağlı olan zayıf kenarlar tutulur; diğer tümü atılır ve geriye yalnızca net, birbirine bağlı sınırlar kalır.
Şekil 5. Canny kenar dedektörü kullanıldıktan sonraki orijinal görüntü ve ilgili çıktı görüntüsü. (Kaynak)
Doğru sonuçlar verirken gürültüyü filtrelediği için Canny kenar algılama, hassasiyetin önemli olduğu alanlarda yaygın olarak kullanılır. Örneğin; tıbbi görüntüleme, uydu haritalama, belge tarama ve robotik görü gibi endüstrilerde kullanılır.
Link to this sectionGradyan tabanlı ve Gaussian tabanlı kenar algılama#
Şimdiye kadar incelediğimiz iki kenar algılama örneği Sobel ve Canny idi. Her ikisi de kenarları bulmayı amaçlasa da soruna farklı yaklaşıyorlar.
Gradyan tabanlı yöntemler (Sobel, Prewitt ve Scharr gibi), kenarları gradyan olarak bilinen keskin parlaklık değişimlerini arayarak tespit eder. Görüntüyü tarar ve bu değişimin en güçlü olduğu yerleri işaretlerler. Bu yöntemler basit, hızlıdır ve görüntüler net olduğunda iyi çalışır. Ancak gürültüye karşı hassastırlar; parlaklıktaki küçük varyasyonlar kenar sanılabilir.
Gaussian tabanlı yöntemler (Canny veya Laplacian of Gaussian gibi), bu sorunu çözmek için ekstra bir adım ekler: önce görüntüyü bulanıklaştırmak. Genellikle bir Gaussian filtresiyle yapılan bu yumuşatma, sahte kenarlar oluşturabilecek küçük varyasyonları azaltır. Yumuşatmadan sonra bu yöntemler hala keskin parlaklık değişimlerini arar, ancak sonuçlar gürültülü veya düşük kaliteli görüntüler için daha temiz ve doğrudur.
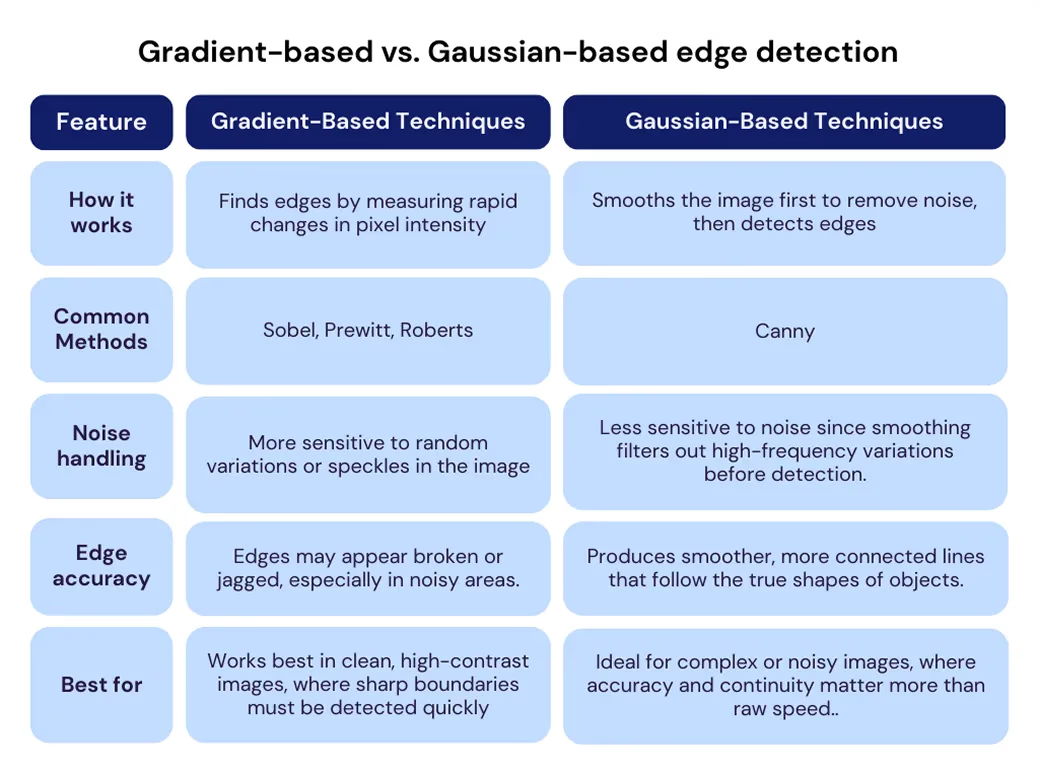
Şekil 6. Gradyan tabanlı ve Gaussian tabanlı kenar algılama. Görsel: yazar.
Link to this sectionKenar algılamanın gerçek dünyadaki uygulamaları#
Kenar algılamanın nasıl çalıştığını daha iyi anladığımıza göre, gerçek dünya durumlarında nasıl uygulandığını keşfedelim.
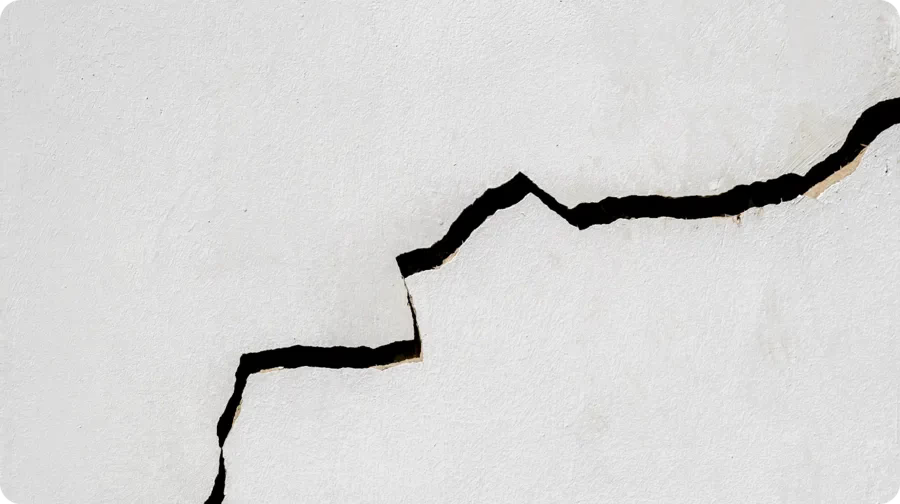
Link to this sectionÇatlakları tanımlamak için kenar algılamayı kullanma#
Köprüler ve yüksek binalar gibi büyük beton yapıların denetlenmesi genellikle zorlu ve tehlikeli bir görevdir. Bu yapılar uzun mesafelere yayılabilir veya yüksek rakımlara ulaşabilir, bu da geleneksel denetimleri yavaş, pahalı ve riskli hale getirir. Bu denetimler ayrıca genellikle iskele, iple erişim, manuel yakından ölçümler veya fotoğrafçılık gerektirir.
2019'da araştırmacılar, beton yüzeylerin ayrıntılı giriş görüntülerini yakalamak için yüksek çözünürlüklü kameralarla donatılmış drone'ları kullanarak daha güvenli ve hızlı bir yöntem test ettiklerinde ilginç bir yaklaşım keşfedildi. Bu görüntüler daha sonra çatlakları otomatik olarak tanımlamak için çeşitli kenar algılama teknikleriyle işlendi.
Çalışma, bu yöntemin tehlikeli alanlara doğrudan insan erişimi ihtiyacını önemli ölçüde azalttığını ve denetimleri hızlandırdığını gösterdi. Ancak doğruluğu hala aydınlatma koşulları, görüntü netliği ve istikrarlı drone operasyonu gibi faktörlere bağlıydı. Bazı durumlarda yanlış pozitifleri ortadan kaldırmak için hala insan incelemesi gerekiyordu.
Link to this sectionTıbbi görüntülemede kenar algılamayı uygulama#
Röntgen ve MRI'lar genellikle gürültü olarak bilinen görsel bozukluklar içerir, bu da ince detayların görülmesini zorlaştırabilir. Bir tümörün kenarlarını tespit etmeye, bir organın ana hatlarını çizmeye veya zaman içindeki küçük değişiklikleri izlemeye çalışırken doktorlar için bu bir zorluk haline gelir.
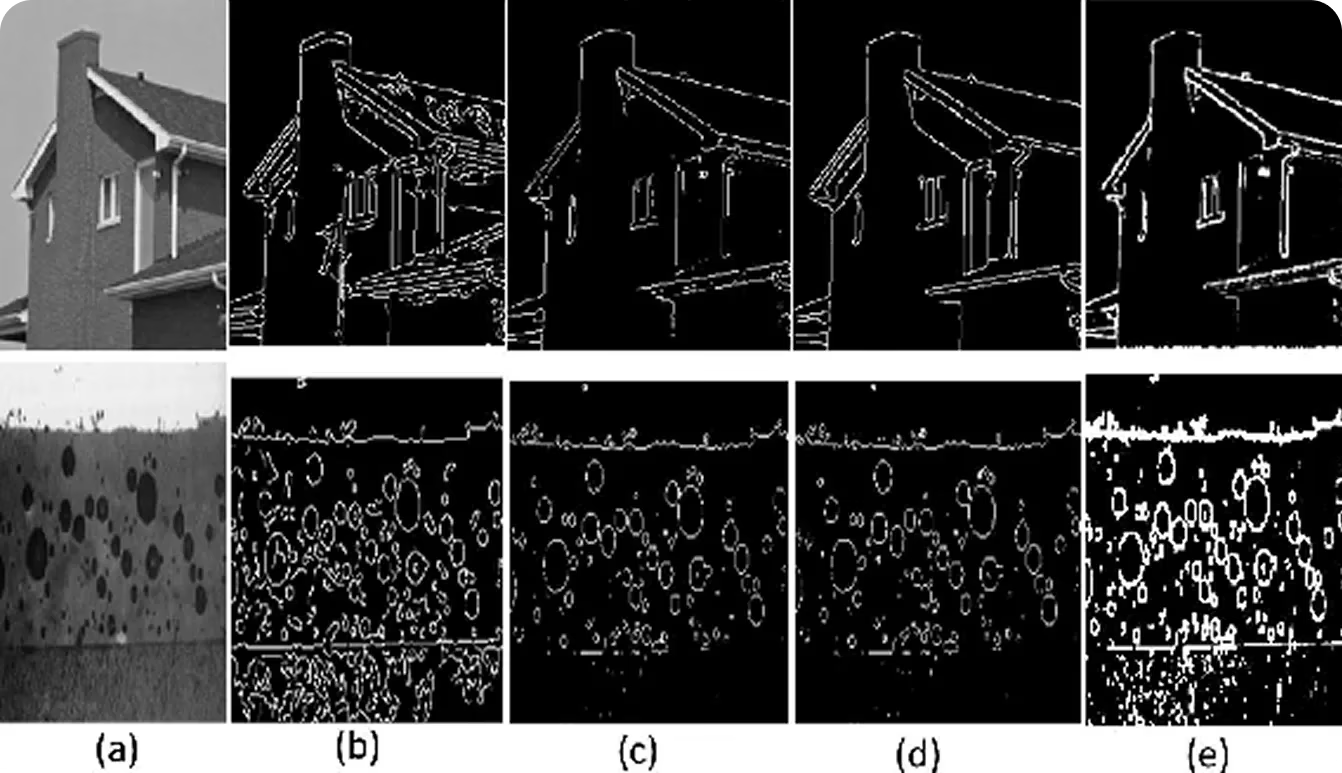
Yakın tarihli bir tıbbi görüntüleme çalışması, Sobel, Canny, Prewitt ve Laplacian gibi yaygın kenar algılama yöntemlerinin gürültülü görüntüleri ne kadar iyi işlediğini test etti. Araştırmacılar görüntülere farklı türlerde ve seviyelerde gürültü ekledi ve her yöntemin önemli özellikleri ne kadar doğru bir şekilde ana hatlarıyla belirleyebildiğini kontrol etti.
Canny, gürültü yoğun olduğunda bile genellikle en temiz kenarları üretti ancak her durumda en iyisi değildi. Bazı yöntemler belirli gürültü desenleriyle daha iyi çalışıyordu, bu yüzden tek bir mükemmel çözüm yoktur.
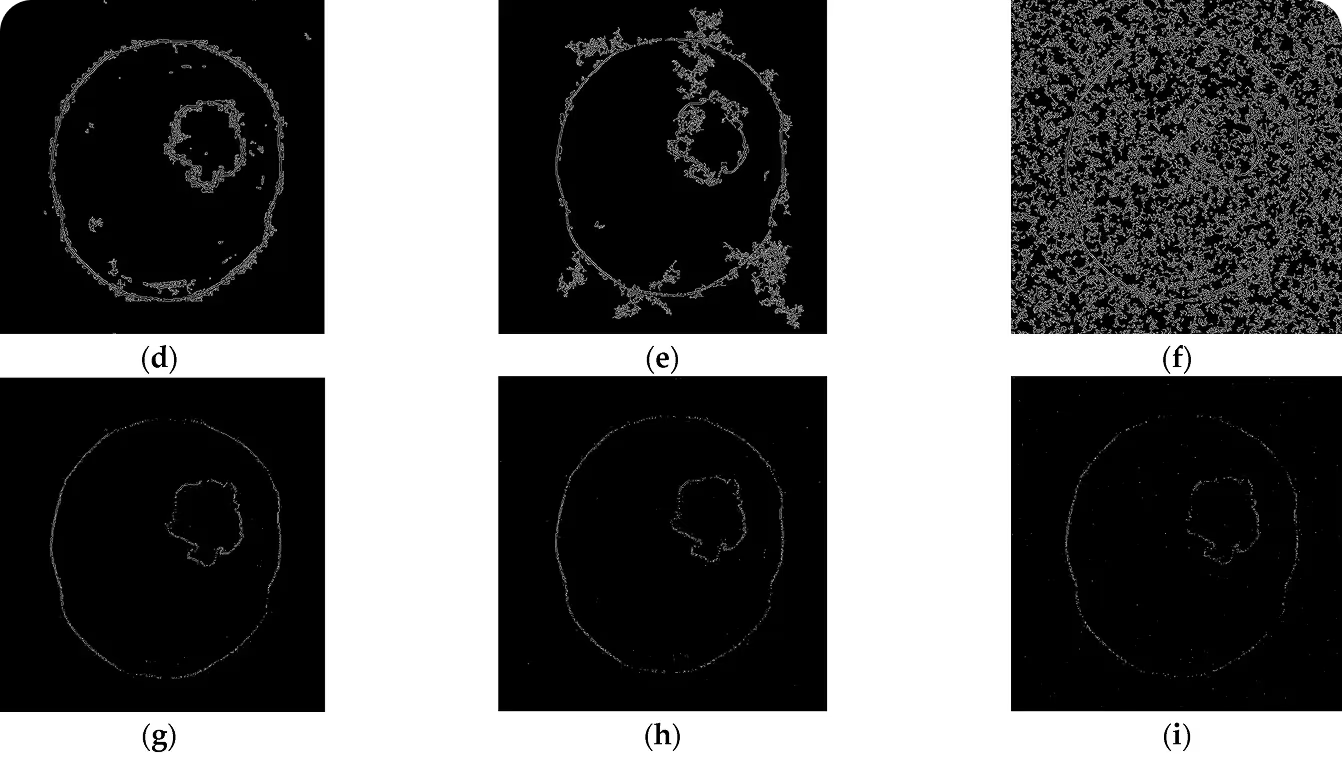
Şekil 7. Gürültü arttıkça Canny (d–f), Sobel'den (g–i) daha net kenarlar sağlar. (Kaynak)
Bu, bilgisayarlı görü gibi teknolojilerin neden bu kadar önemli olduğunu vurguluyor. Gelişmiş algoritmaları ve vizyon AI modellerini birleştiren bu tür çözümler, zorlu koşullarda bile daha doğru ve güvenilir sonuçlar sunmak için temel kenar algılamanın ötesine geçebilir.
Link to this sectionKenar algılamanın artıları#
Kenar algılama ve görüntü kullanmanın bazı avantajları şunlardır:
- Daha iyi veri sıkıştırma: Kenar algılama, görüntülerin yalnızca önemli özellikler kullanılarak temsil edilmesini sağlayarak temel bilgileri korurken dosya boyutunu küçültür. Bu, depolamayı ve iletimi daha verimli hale getirir.
- Daha hassas nesne konumlandırma: Kenar algılama, nesne sınırlarını doğru bir şekilde tanımlayarak sistemlerin nesneleri bulma ve takip etme yeteneğini geliştirir; bu da robotikte AI ve otonom araçlar gibi uygulamalara fayda sağlar.
- Çok ölçekli özellik algılama: Kenar algılama teknikleri, görüntüleri farklı ölçeklerde analiz ederek hem küçük detayları hem de daha büyük şekilleri yakalayabilir. Bu esneklik, doku analizinden sahne anlamaya kadar çeşitli görevlerde faydalıdır.
Link to this sectionKenar algılama için görüntü işleme kullanmanın sınırlamaları#
Görüntü işlemede kenar algılamanın birçok faydası olsa da bazı zorlukları da vardır. İşte dikkate alınması gereken temel sınırlamalardan bazıları:
- Karmaşık dokularla ilgili sorunlar: Karmaşık veya tekrarlayan desenlere sahip görüntülerde kenar algılama genellikle birçok yanlış veya alakasız kenar üretir, bu da daha fazla analizi zorlaştırır ve güvenilirliği azaltır.
- Aydınlatmaya karşı hassasiyet: Parlaklık, gölge ve yansımalardaki varyasyonlar, kenar dedektörlerinin aydınlatmadaki değişimleri nesne sınırları olarak yanlış yorumlamasına ve tutarsız sonuçlara yol açabilir.
- Nesne tanımlama yok: Kenarlar nesnelerin nerede başlayıp bittiğini vurgulasa da nesnelerin ne olduğunu göstermezler. Tespit edilen kenarlara anlam veya etiket atamak için ek işlem gerekir.
Link to this sectionBilgisayarlı görü kenar algılama için ne zaman kullanılabilir?#
Kenar algılama, gözlerimizin ve beynimizin dünyayı anlamlandırmak için nasıl birlikte çalıştığından ilham alır. İnsan görüşü söz konusu olduğunda, görsel korteksteki özel nöronlar kenarlara, çizgilere ve sınırlara karşı oldukça hassastır.
Bu görsel ipuçları, bir nesnenin nerede bitip diğerinin nerede başladığını hızlı bir şekilde belirlememize yardımcı olur. Basit bir çizgi çiziminin bile anında tanınabilir olmasının nedeni budur; beynimiz şekilleri ve nesneleri tanımlamak için büyük ölçüde kenarlara güvenir.
Bilgisayarlı görü bu yeteneği taklit etmeyi amaçlar ancak bir adım daha ileri götürür. Ultralytics YOLO11 gibi modeller, temel kenar vurgulama ve görüntü iyileştirmenin ötesine geçer. Nesneleri algılayabilir, onları hassasiyetle ana hatlarıyla belirleyebilir ve hareketi gerçek zamanlı olarak takip edebilirler. Bu daha derin anlama düzeyi, onları yalnızca kenar algılamanın yeterli olmadığı senaryolarda vazgeçilmez kılar.
Link to this sectionKenarları daha doğru tespit etmek için Ultralytics YOLO11 kullanma#
İşte YOLO11 tarafından desteklenen ve kenar algılamanın üzerine inşa edilip ötesine geçen bazı temel bilgisayarlı görü görevleri:
- Nesne algılama: Bir görüntü veya videodaki birden fazla nesneyi her birinin etrafına sınırlayıcı kutular çizerek tanımlar ve konumlandırır; neyin mevcut olduğu ve her nesnenin nerede konumlandığına dair net bir görünüm sağlar.
- Örnek segmentasyonu: Bu, nesnelerin örtüştüğü veya düzensiz şekillere sahip olduğu durumlarda bile temiz ve hassas ana hatlar üreterek nesneleri piksel düzeyine kadar ayırmayı içerir.
- Pose estimation (Poz tahmini): Buradaki amaç, bir nesnenin veya kişinin konumunu, yönelimini veya duruşunu belirlemektir; bu, hareketin izlenmesine veya zaman içindeki yapısal değişikliklerin tespit edilmesine yardımcı olur.
- Object tracking (Nesne takibi): Bu görev, doğru ve uzun süreli gözlem için tutarlı bir tanımlama sağlayarak bir nesneyi video kareleri boyunca hareket ederken takip eder.
- Image classification (Görüntü sınıflandırma): Görsel özelliklerine dayalı olarak nesnelere veya görüntülerin tamamına etiketler atar, bu da büyük veri kümelerini düzenlemeyi ve yorumlamayı kolaylaştırır.
Link to this sectionBilgisayarlı görü ile altyapıda kenar tespiti#
Geleneksel olarak kenar tespitine dayanan bir uygulamayı geliştiren bilgisayarlı görü için iyi bir örnek, altyapı ve endüstriyel varlıklardaki çatlak tespitidir. YOLO11 gibi bilgisayarlı görü modelleri, yollardaki, köprülerdeki ve boru hatlarındaki çatlakları doğru bir şekilde tanımlamak için eğitilebilir. Aynı teknik, uçak bakımı, bina denetimleri ve üretim kalite kontrolünde de uygulanabilir; bu da denetimleri hızlandırmaya ve güvenliği artırmaya yardımcı olur.
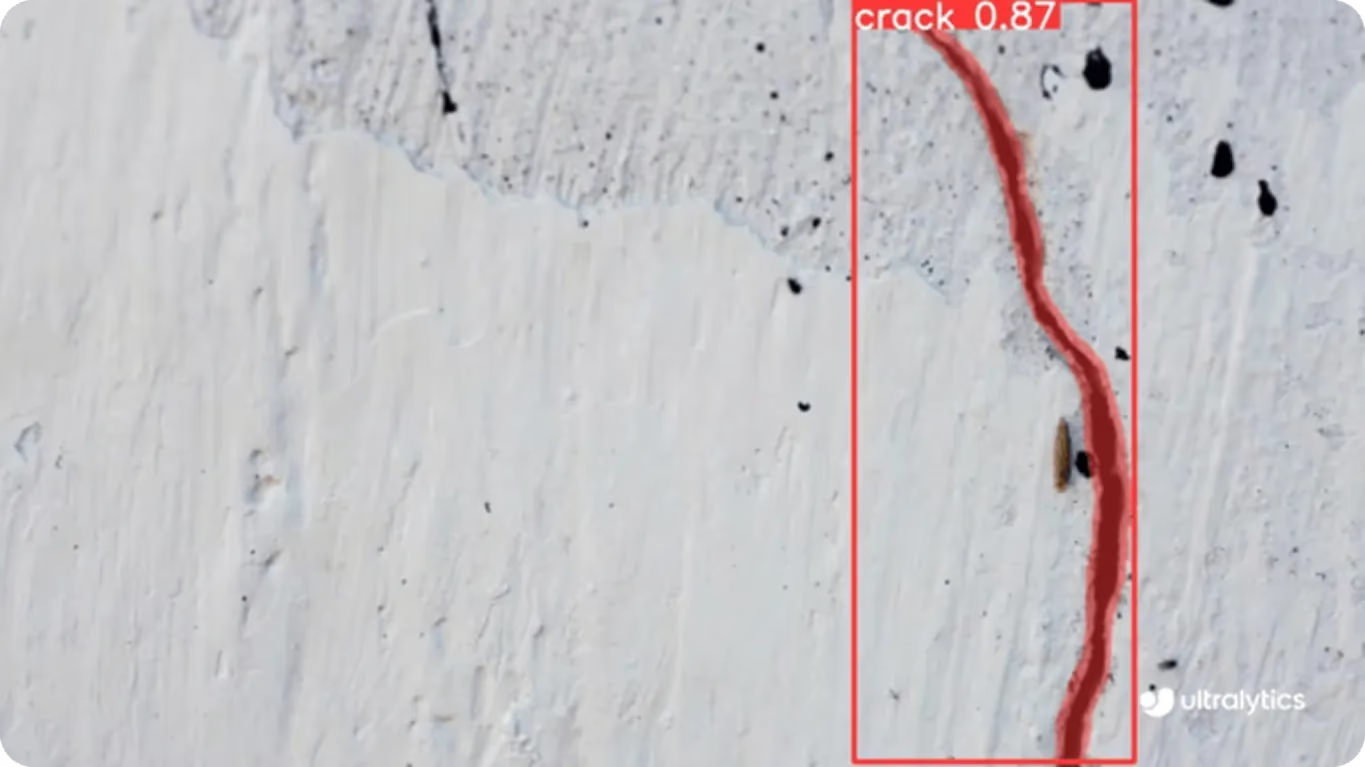
Şekil 8. YOLO11 ile çatlak segmentasyonu örneği. (Kaynak)
Link to this sectionÖne çıkanlar#
Kenar tespiti, basit erken dönem yöntemlerinden karmaşık görüntülerdeki ince sınırları bile fark edebilen gelişmiş tekniklere kadar uzun bir yol kat etti. Önemli detayları ortaya çıkarmaya, kilit alanları vurgulamaya ve görüntüleri daha derinlemesine analiz için hazırlamaya yardımcı olarak görüntü işlemenin temel bir parçası haline geldi.
Bilgisayarlı görüde kenar tespiti, şekillerin tanımlanmasında, nesnelerin ayrıştırılmasında ve yararlı bilgilerin çıkarılmasında önemli bir rol oynar. Doğru ve güvenilir görsel anlayış sağlamak için tıbbi görüntüleme, endüstriyel denetimler, otonom sürüş ve güvenlik gibi birçok alanda kullanılır.
Yapay zeka hakkında daha fazla bilgi edinmek için topluluğumuza katıl ve GitHub depomuza göz at. Kendi vision AI projene başlamak istiyorsan, lisanslama seçeneklerimize bir göz at. Sağlık hizmetlerinde yapay zeka ve perakendede vision AI gibi uygulamalar hakkında daha fazla bilgiyi çözümler sayfalarımızı ziyaret ederek keşfedebilirsin.






