关于使用 Ultralytics YOLO 模型追踪视频中移动物体的指南
了解计算机视觉追踪系统的工作原理,探索支持物体追踪(如 YOLO11)的热门模型,并发现它们的实际应用。
能够组装电子零件的机器人、捕捉超速车辆的系统,以及追踪顾客购物行为的智能零售解决方案——所有这些创新都依赖于 计算机视觉。它是人工智能 (AI) 的一个分支,旨在帮助机器分析和理解图像与视频。
例如,机器人需要识别并跟随不同的零件才能正确地将它们组装在一起。同样,交通系统可以使用计算机视觉来发现车辆、读取车牌并判断是否有人超速。同时,在商店里,视觉 AI 可以帮助追踪顾客正在查看或拿取的商品,甚至可以监控库存。
此类应用由诸如 Ultralytics YOLO11 等计算机视觉模型提供支持,这些模型支持广泛的视觉任务。其中许多任务专注于从单张图像中获取见解,但有一个特别有趣的任务——目标追踪,可用于跟随物体在连续图像或视频帧中的移动。

图 1. 检测和追踪汽车的示例。
在本指南中,我们将深入了解目标追踪的工作原理,并探索其在现实世界中的应用实例。我们还将讨论像 Ultralytics YOLO11 这样的视觉 AI 模型如何支持目标追踪。让我们开始吧!
Link to this section深入了解计算机视觉追踪系统#
目标追踪是一项用于跟随物体在视频帧中移动的 计算机视觉任务,它可以帮助系统监控并了解事物随时间发生的变化。这与人类自然地用眼睛跟随移动的人或物体非常相似,就像你在看网球比赛时,眼睛会追踪网球在球场上来回移动一样。
同样地,目标追踪涉及使用摄像头和 AI 来实时跟随球的移动。这项技术可以让居家观众更好地理解比赛流程,尤其是通过速度、轨迹和球员定位等分析数据。
虽然这种视觉追踪对人类来说似乎毫不费力,但对于机器视觉而言,它涉及一系列由视觉 AI 模型驱动的步骤。以下是目标追踪工作原理的简单分解:
- 捕获视频:摄像头记录视频素材,捕获物体在一段时间内穿过场景的移动过程。
- 检测对象:像 YOLO11 这样基于 AI 的 计算机视觉模型 可以分析每一帧图像,以识别并定位特定对象,例如人、车辆或产品。
- 分配身份:一旦检测到对象,追踪算法会为其分配一个唯一 ID,以便在多个帧中对其进行跟随,从而确保系统即使在对象移动时也能识别出这是同一个对象。
- 监控移动:系统会随着时间推移监控移动情况,这些数据可用于收集诸如速度、方向以及与其他对象的交互等信息。
- 生成见解:根据具体的应用场景,这些信息可实时用于提供分析、辅助决策或实现视觉叠加。
Link to this section比较 YOLO 中的目标检测与追踪#
YOLO11 支持的另一项与目标追踪密切相关的计算机视觉任务是 目标检测。让我们探索一下这两项任务之间的区别。
目标检测涉及在单张图像或视频帧中识别并定位感兴趣的对象。例如,自动驾驶汽车使用目标检测来识别车载摄像头捕获的单帧图像中的停车标志或行人。它回答了这样一个问题:“这张图像里有什么,它在哪里?”然而,它不提供关于对象下一步去向的任何信息。
目标追踪在目标检测的基础上增加了对随时间变化的运动的理解。两者之间的关键区别在于它们处理时间和运动的方式。目标检测将每一帧视为独立的快照,而目标追踪则连接帧与帧之间的点,利用历史数据预测对象的未来位置。
通过结合两者,我们可以构建出强大的视觉 AI 系统,使其能够在动态环境中进行实时追踪。例如,自动安防系统可以检测进入空间的人员,并持续 追踪他们的移动 轨迹。
Link to this section使用 Ultralytics YOLO 模型进行实时追踪#
既然我们已经介绍了目标检测与追踪之间的区别,让我们来看看 Ultralytics YOLO 模型(如 YOLO11)是如何支持实时目标追踪的。
虽然 YOLO 模型本身并非追踪算法,但它们通过在每一帧视频中检测对象起到了至关重要的作用。一旦检测到对象,就需要追踪算法为它们分配唯一 ID,从而允许系统在帧与帧之间跟随它们的移动。
为了满足这一需求,Ultralytics Python 软件包 将目标检测与 BoT-SORT 和 ByteTrack 等流行追踪算法无缝集成。这种集成使用户能够以极少的配置同时运行检测和追踪。
在使用 YOLO 模型进行目标追踪时,你可以根据应用需求选择要应用的追踪算法。例如,得益于运动预测和深度学习的应用,BoT-SORT 是追踪移动轨迹不可预测物体的良好选择。另一方面,ByteTrack 在拥挤场景中表现尤为出色,即使在对象模糊或部分遮挡的情况下也能保持可靠的追踪。
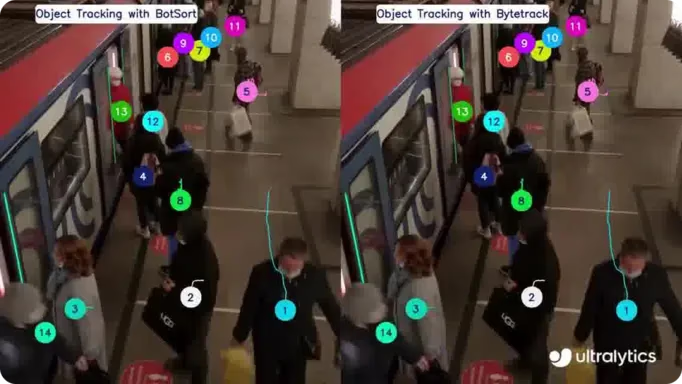
图 2. Ultralytics Python 软件包无缝集成了 BoT-SORT 和 ByteTrack。
Link to this section自定义 YOLO 模型训练与目标追踪有何关联?#
自定义训练 是在特定数据集上微调预训练目标检测模型(如 YOLO11)的过程,使其能够识别标准数据集中不包含的对象。当你的追踪系统需要跟随自定义或不常见的对象时,这一点尤为重要。
追踪系统依赖于检测模型首先识别对象。如果 YOLO 模型无法检测到特定物品,例如某种类型的机械或野生动物,那么追踪算法将无法对其进行跟随。
这就是为什么自定义训练至关重要:它确保了检测模型能够准确识别你想要追踪的对象。
同样重要的是要记住,在此过程中只有检测模型被微调。诸如 BoT-SORT 或 ByteTrack 之类的追踪算法并未经过自定义训练——它们只是使用 YOLO 模型的输出来跟随被检测的对象。
Link to this sectionUltralytics YOLO 目标追踪的应用#
现在我们已经更好地了解了什么是目标追踪及其工作原理,让我们探讨一些该技术正在产生影响的现实世界应用。
Link to this section使用 Ultralytics YOLO 进行速度估计的实时追踪#
由计算机视觉支持的 速度估计 系统依赖于目标检测和追踪等任务。这些系统旨在计算物体(无论是车辆、骑行者还是行人)的移动速度。这些信息对于从交通管理到安全监控和工业自动化的各种应用都至关重要。
使用像 Ultralytics YOLO11 这样的模型,可以在视频帧中检测并追踪对象。通过分析物体在特定时间内移动的距离,系统可以估计其速度。
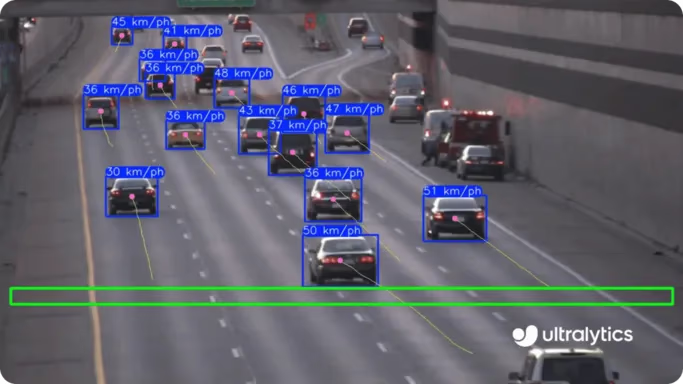
图 3. 利用 YOLO11 对目标追踪的支持进行速度估计。
Link to this section探索制造业中的目标追踪#
制造流程可能节奏快且高度复杂,这使得人工追踪每一件生产出的产品变得困难。目标追踪为自动化监控产品在每个生产阶段的移动提供了一个好的解决方案。它可以帮助工厂在不降低生产速度的情况下保持高水平的准确性和效率。
从统计传送带上的产品到发现缺陷或验证组装是否正确,目标追踪为原本耗时或容易出错的任务带来了可见性和可控性。这项技术在 食品加工、电子产品和包装等高速率行业中尤为有效,因为在这些行业中,速度和精度至关重要。
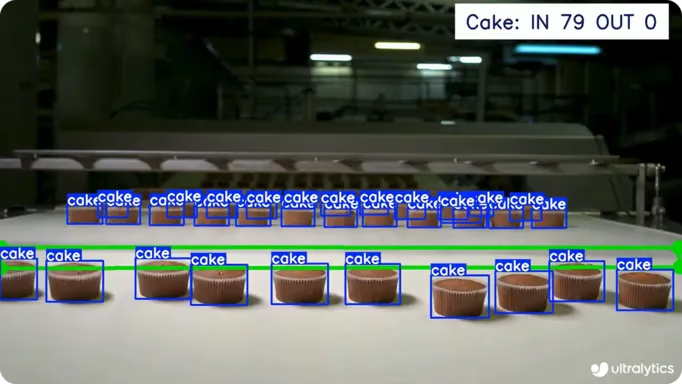
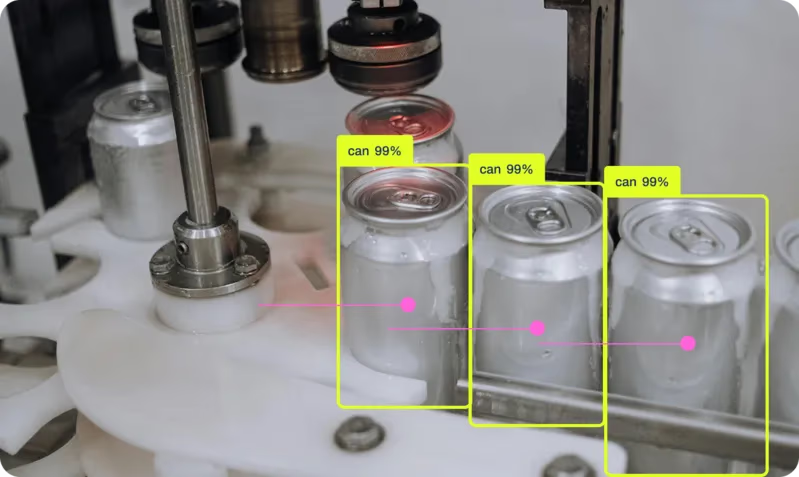
图 4. 使用 YOLO11 在装配线上追踪和计数食品的示例。
Link to this section零售分析中目标追踪概述#
每天都有无数顾客进出 零售商店,理解他们的行为对于改善顾客体验和业务表现至关重要。目标追踪使零售商能够监控人流量、测量驻留时间并分析移动模式——所有这些都无需使用侵入式或手动方法。
通过追踪顾客进入、离开和在店内走动的过程,企业可以深入了解高峰时段、热门区域甚至排队长度。这些见解可以为有关人员配置、店面布局和库存摆放的决策提供信息,最终实现更高效的运营并增加销售额。
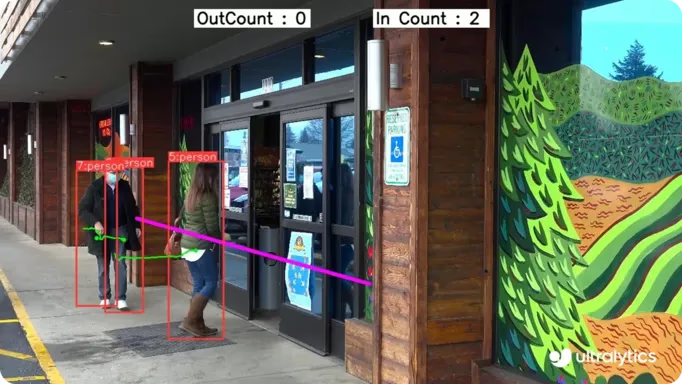
图 5. 使用 YOLO11 的目标追踪能力监控商店内进出的人员。
Link to this section目标追踪的利与弊#
从零售商店到工厂车间,目标追踪正被用于各种行业以提升效率、安全性和整体体验等因素。以下是目标追踪能为各行各业带来的一些主要好处:
- 实现实时预警:集成了目标追踪的系统可以配置为在检测到异常情况时自动触发警报,例如有人进入限制区域或送货在某处停留时间过长。
- 与其他系统集成:目标追踪数据可以与其他技术结合使用,如 面部识别、热成像摄像头或库存系统,以获得更有力的见解。
- 从长远来看具有成本效益:虽然初始设置可能需要投资,但自动化追踪减少了对人工劳动的需求,降低了错误率,并随时间推移削减了运营成本。
虽然这些好处凸显了目标追踪如何积极影响不同的用例,但考虑其实现过程中涉及的挑战也很重要。让我们深入了解一下目标追踪的一些局限性:
-
在 拥挤环境 中的难度:在音乐会、购物中心或城市街道等繁忙场所,追踪系统可能难以区分靠得很近的人或物体,从而导致混淆或结果不准确。
-
对环境条件敏感:光照不良、雾气、快速移动或摄像头晃动都会影响系统准确追踪对象的能力,特别是在户外或不受控的环境中。
-
隐私和法律问题:不当处理个人数据、缺乏用户同意或在公共场所进行监控可能会引发道德问题,并导致违反隐私法。
Link to this section关键要点#
目标追踪是一项计算机视觉任务,它允许机器随着时间推移跟随对象的移动。它被广泛应用于各种现实场景——从估计车辆速度和统计装配线上的产品,到分析体育运动中的球员动作。
借助 YOLO11 等视觉 AI 模型以及 BoT-SORT 和 ByteTrack 等追踪算法,目标追踪在不同行业中变得更快、更智能、更易于使用。随着目标追踪技术的演进,它正在让系统变得越来越智能、高效和灵敏,每一次追踪都从一帧开始。
想了解更多关于计算机视觉和 AI 的知识吗?探索我们的 GitHub 仓库,与 我们的社区 建立联系,并查看 我们的许可选项 来开启你的计算机视觉项目。如果你正在探索 AI 在制造业 和 汽车行业计算机视觉 等领域的创新,请访问我们的解决方案页面以了解更多信息。






