使用 Ultralytics YOLO26 实现交通事件管理自动化
了解 Ultralytics YOLO 模型如何通过实现早期检测、快速响应和更安全的道路运营来彻底改变交通事件管理。

每天,轻微的道路事件都会以各种细微方式影响交通流量,并可能迅速引发连锁反应,导致更严重的后果。例如,高速公路上的一辆故障车辆或道路碎片,很容易引发长时间的交通延误、交通流不稳以及二次事故。
对于消防部门等应急响应人员来说,这带来了巨大的压力。每花一分钟进行现场评估,都可能增加应急人员暴露在移动车辆中的风险,从而损害道路安全。
在这种情况下,公众的 道路安全 以及应急响应人员自身的安全至关重要。依赖人工监控的交通、公共事业和应急管理系统,在高峰时段或涉及危险品的事故中往往难以应对。
许多 交通事件管理 (TIM) 团队现在正采用 计算机视觉 来分析道路状况并尽早识别事故。计算机视觉是人工智能 (AI) 的一个分支,它使机器能够查看并解读来自摄像头和视频的视觉数据。
视觉系统可以监控道路、检测事故并提供实时的视觉上下文。这种早期可见性可以帮助紧急医疗服务 (EMS)、执法部门和交通团队了解现场情况并更迅速地做出响应。
这些功能由训练有素的视觉模型驱动,例如 Ultralytics YOLO26。通过从实时视频流中自动提取可操作的洞察,这些模型减少了对人工监控的依赖,实现了更快速、更明智的决策,从而能够更早地发现事故,并优化应急响应的协调工作。

图 1. 由 YOLO 驱动的实时事故检测示例 (来源)
在本文中,我们将探讨视觉 AI 如何改变交通事件管理,以及像 Ultralytics YOLO26 这样的 计算机视觉模型 如何帮助应急响应人员更快地发现并清理事故。让我们开始吧!
Link to this section道路事件管理中的常见挑战#
以下是交通事件管理团队在现场面临的一些核心挑战:
- 实时可见性有限:TIM 响应人员通常只能从电话、摄像头或司机那里获取部分信息。如果不清楚事故现场的状况,就很难就车道封闭、交通管制或复杂的道路情况做出早期决策。
- 响应人员的安全:当应急车辆在繁忙交通中停下或作业时,包括消防部门和 EMS 在内的急救人员会暴露在快速移动的车辆面前。这显著增加了安全风险,尤其是在未遵守“避让”法规或涉及危险品时。
- 交通管理的挑战:发生交通事故后,如果缺乏及时有效的协调,交通流会迅速恶化。拥堵加剧,驾驶员做出仓促判断,不安全状况蔓延至整个交通系统,从而影响公共安全和交通安全目标的实现。
- 二次事故:可见度低、突然减速以及车道封闭措施不明确或延迟,都可能导致二次事故。如果无法及时通知驾驶员,他们可能不会意识到前方的危险,从而增加后续事故的风险。
Link to this section将计算机视觉用于交通事件管理#
大多数交通事件管理系统已经包含了一个部署在高速公路和城市道路上的设备网络。交通信号灯摄像头、CCTV 系统以及安装在立柱、拖车或应急车辆上的便携式摄像头已日益普及。
计算机视觉可以轻松集成到这些系统中,因为它基于现有的摄像头基础设施,并直接处理视频流以提取可操作的洞察。交通摄像头的视频流可以与车速和流量检测器等道路传感器相结合,提供更全面的交通状况图景。
特别是,像 Ultralytics YOLO26 这样的视觉模型可以用来处理视频流。YOLO26 支持多种核心的 计算机视觉任务,有助于检测事故、解读道路状况并为交通运营提供可操作的洞察。

图 2. 使用 Ultralytics YOLO 模型监控和分析交通 (来源)
以下是可用于监控和管理交通事件的一些视觉任务的简单分解:
- 目标检测:此任务用于识别并定位每个视频帧中的关键目标,例如车辆、应急车辆、碎片以及停放或故障车辆,从而支持早期事故检测和态势感知。
- 目标跟踪:可用于跟踪车辆或物体在场景中移动的过程,从而更轻松地观察交通流的变化。
- 实例分割:这种方法可以勾勒出目标的精确形状。在 TIM 中,此任务可用于了解车道阻塞情况,这对于规划车道封闭和交通管制非常有用。
Link to this sectionUltralytics YOLO26 如何改善交通事件管理#
Ultralytics YOLO 模型(如 YOLO26)开箱即用,提供预训练版本。这意味着它们已经在 COCO 数据集 等大规模、广泛使用的数据集上进行了训练。
得益于这种预训练,YOLO26 可以立即用于检测常见的现实目标,例如汽车、自行车、行人、摩托车和其他日常物品。这为理解道路场景奠定了强大的基础,并使团队无需从头开始训练模型,即可构建车辆计数、交通流量分析和速度估算等更复杂的应用。
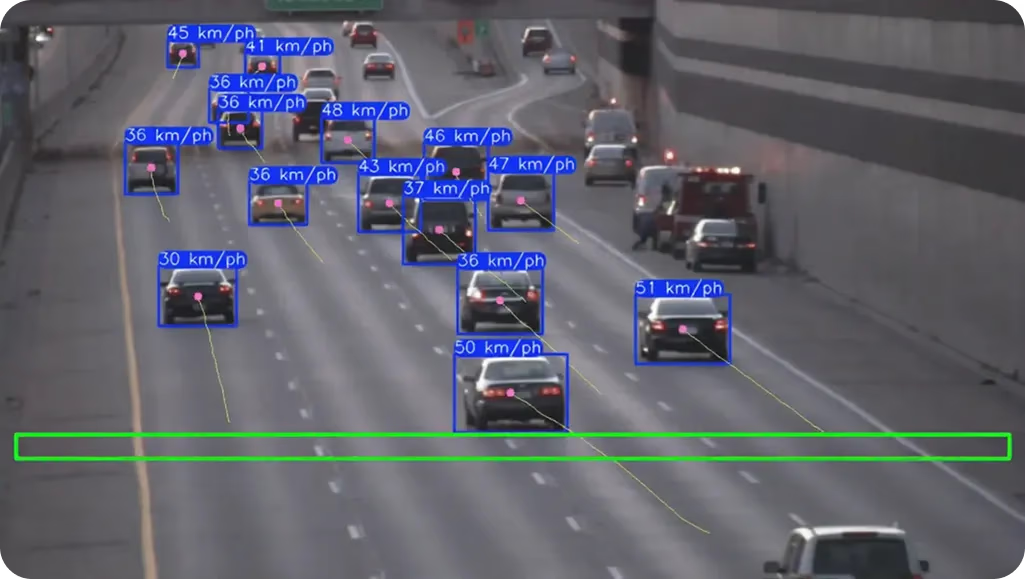
图 3. 使用 YOLO 进行车辆检测和跟踪以进行速度估算 (来源)
对于更具体的交通事件管理应用,这些预训练模型可以使用标记好的、特定领域的图像和视频数据轻松进行自定义训练,从而检测感兴趣的特定目标。
例如,可以训练一个模型来可靠地识别道路监控画面中的红色消防车,帮助交通团队更快地识别活跃的应急响应场景。所生成的视频洞察还可以用于响应人员培训,让团队能够回顾真实的事故场景,并提高未来应对类似事件的准备能力。
Link to this section视觉 AI 在交通事件管理中的关键应用#
接下来,我们将通过示例演示计算机视觉如何应用于实际的交通事件管理系统中。
Link to this section事故和障碍物检测#
交通事件管理中最大的挑战之一是尽早识别事故和道路障碍物,以便团队能够快速安全地清理事故现场。过去,检测主要依赖于驾驶员报告、巡逻车辆或人工监控摄像头画面的人员。
虽然这些方法今天仍在使用,但它们可能导致响应延迟或遗漏细节,特别是在繁忙的高速公路或能见度较低的情况下。视觉 AI 通过使用 Ultralytics YOLO26 等模型实时持续 监控道路,改善了这一流程。
例如,YOLO26 的目标检测和跟踪功能可用于识别停在运行车道上的车辆,并检测其后方交通是否正在减速或积压。
当检测到这种异常活动时,系统可以尽早向交通团队发出警报,让响应人员有更多时间来规划交通管制、提醒驾驶员并协调有效的响应。更早的检测还有助于快速清理、减少拥堵并降低二次事故的风险。
Link to this section通过主动监控提升驾驶员和道路安全#
交通事件管理不仅仅是在事故发生后进行响应。它还包括在道路问题演变成事故之前尽早发现它们。
借助计算机视觉,联邦公路管理局 (FHWA) 和交通部等政府部门可以持续监控道路,并识别路面损坏、碎片或其他危险等问题。

图 4. 道路损坏示例 (来源)
使用 实例分割 等技术,YOLO26 等视觉模型可以精确勾勒出道路录像中路面的裂缝、坑洼或损坏部分。这样不仅能检测到问题的存在,还能更容易地了解损坏的大小和位置。
尽早识别这些问题,无论是通过安排维护、调整交通管制还是提醒驾驶员,都可以更早地采取行动。这种主动方法能确保道路更安全,降低事故风险,并改善每个人的日常驾驶条件。
Link to this section在交通事件管理中使用视觉 AI 的利弊#
以下是使用视觉 AI 支持交通事件管理和道路安全的一些主要好处:
- 数据驱动决策: 事件数据和视频洞察支持绩效跟踪、报告、长期交通安全规划以及 TIM 培训计划。
- 一致的事件响应: 与人工监控不同,视觉 AI 可持续运行而不产生疲劳,支持更持续、稳定的覆盖。
尽管有这些好处,但也存在一些局限性。以下是需要考虑的一些因素:
- 持续维护: 模型可能需要定期重新训练,以适应交通模式、基础设施或摄像头配置的变化。
- 成本考量: 虽然成本可能会随时间降低,但硬件、软件和培训的初始投资可能非常可观。
Link to this section关键要点#
当团队能够尽早发现问题并实时了解道路上发生的事情时,交通事件管理的效果最好。视觉 AI 通过将日常交通摄像头画面转化为有用的洞察,支持更快的响应和更安全的决策,从而使这一切成为可能。如果使用得当,它可以为驾驶员提供更安全的道路,并降低每天在路上工作的人员的风险。
想将视觉 AI 引入你的项目吗?加入我们活跃的 社区,了解 制造业中的视觉 AI 和 机器人技术中的计算机视觉。探索我们的 GitHub 存储库 以了解更多信息。查看我们的 许可选项 以开始使用!






