关于计算机视觉任务你需要了解的一切
了解物体追踪、实例分割和图像分类等计算机视觉任务的工作原理,以及 Ultralytics YOLO11 如何支持这些任务。
得益于摄像头和人工智能(AI)的进步,计算机和机器现在能够以类似于人类的方式观察世界。例如,它们可以识别人员、追踪物体,甚至理解视频中发生事件的背景信息。
具体来说,计算机视觉是AI的一个分支,使机器能够理解并解释周围世界的视觉信息。计算机视觉涉及多种任务,每种任务都旨在从图像或视频中提取特定类型的洞察。例如,目标检测有助于识别和定位图片中的不同项目,而追踪、分割和姿态估计等其他任务则有助于机器更准确地理解运动、形状和位置。
特定应用所使用的计算机视觉任务取决于你所需的洞察类型。像Ultralytics YOLO11这样的计算机视觉模型支持多种计算机视觉任务,使其成为构建现实世界Vision AI系统的可靠选择。
在本指南中,我们将详细了解像YOLO11这类模型所支持的计算机视觉任务。我们将探索每项任务的工作原理以及它们如何在不同行业中使用。让我们开始吧!
Link to this section什么是计算机视觉任务?#
计算机视觉任务旨在以不同方式复制人类的视觉能力。这些任务可以帮助机器检测物体、追踪其运动、估计姿态,甚至勾勒出图像和视频中的各个元素。通常,计算机视觉任务由能够将视觉数据分解为更小部分以便更清晰地解释所发生情况的模型来实现。
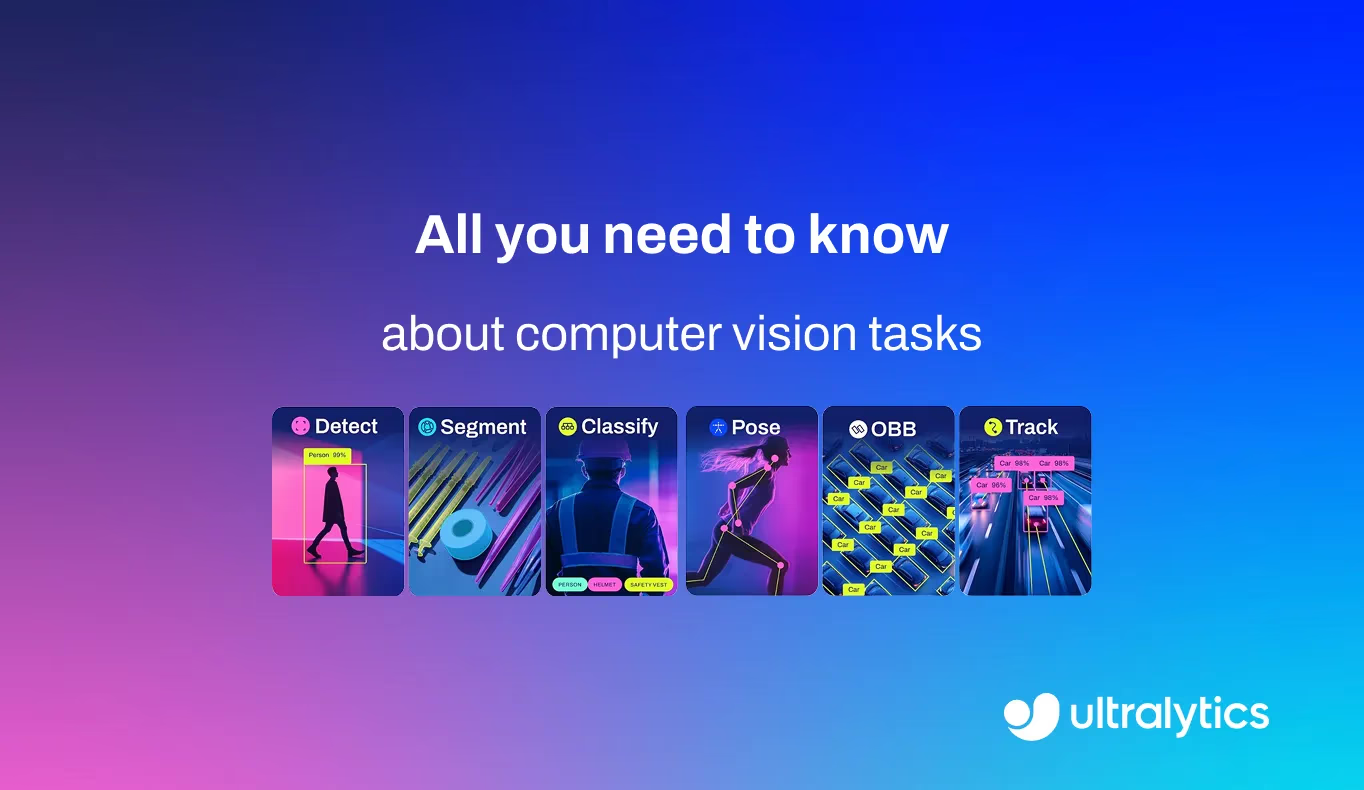
Vision AI模型(如Ultralytics YOLO模型)可以在一个框架内支持多种任务,例如检测、追踪和分割。由于这种通用性,YOLO11模型很容易应用于各种用例。

图1。YOLO11支持的计算机视觉任务。
体育分析就是一个很好的例子。YOLO11可用于通过目标检测来识别球场上的每位球员,然后通过目标追踪在整个比赛过程中跟随他们。同时,YOLO11的姿态估计功能可以帮助分析球员的动作和技术,而实例分割则可以将每位球员从背景中分离出来,从而提高分析的精确度。
这些基于YOLO11的计算机视觉任务共同创造了比赛过程的完整画面,让团队能够更深入地了解球员表现、战术和整体策略。
Link to this sectionYOLO11支持的计算机视觉任务概览#
现在我们已经了解了什么是计算机视觉任务,让我们利用现实世界的例子,更深入地探讨YOLO11支持的每项任务。
Link to this sectionYOLO11对图像分类的支持#
当你查看照片时,大多数人都能轻易分辨出它显示的是狗、山还是交通标志,因为我们都学习过这些东西通常是什么样子。图像分类通过教机器根据主要物体(无论是“汽车”、“香蕉”还是“带有骨折的X光片”)对图像进行分类和标记,帮助机器做到同样的事情。该标签有助于计算机视觉系统理解视觉内容,以便它们能够做出相应的反应或决策。
这项计算机视觉任务的一个有趣应用是野生动物监测。图像分类可用于从野外拍摄的照片中识别不同的动物物种。通过自动标记图像,研究人员可以更轻松地追踪种群、监测迁徙模式并识别濒危物种,从而支持保护工作。

图2。 使用YOLO11进行图像分类的示例。
Link to this sectionYOLO11的目标检测能力#
虽然图像分类有助于对图像内容获得总体了解,但它只能为整个图像分配一个标签。在需要详细信息(例如多个物体的精确位置和身份)的情况下,目标检测就变得至关重要。
目标检测是识别和定位图像中单个物体的过程,通常通过在它们周围绘制边界框(bbox)来实现。Ultralytics YOLO11在实时目标检测方面表现尤为出色,使其成为广泛应用的理想选择。
以零售店用于补货的计算机视觉解决方案为例。目标检测可以帮助清点水果、蔬菜和其他商品,确保库存准确。在农业领域,同样的技术可以监测作物成熟度,帮助农民确定最佳收获时间,甚至能区分成熟与未成熟的农产品。
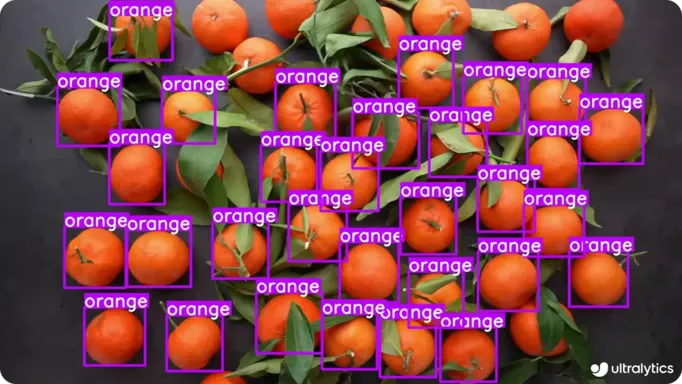
图3。使用Ultralytics YOLO11检测水果。
Link to this section使用YOLO11进行实例分割#
目标检测使用边界框来识别和定位图像中的物体,但它无法捕捉它们的精确形状。这就是实例分割发挥作用的地方。实例分割不是在物体周围画一个框,而是勾勒出其精确的轮廓。
你可以这样理解:它不仅仅是指出“该区域有一个苹果”,而是仔细勾勒并填充出苹果的确切形状。这种详细的过程有助于AI系统清晰地理解物体的边界,特别是在物体靠得很近时。
实例分割可应用于许多领域,从基础设施检查到地质勘探。例如,可以使用YOLO11分析来自地质勘探的数据,以分割大型和微小的表面裂缝或异常。通过在这些异常周围绘制精确的边界,工程师可以查明问题并在项目开始前解决它们。
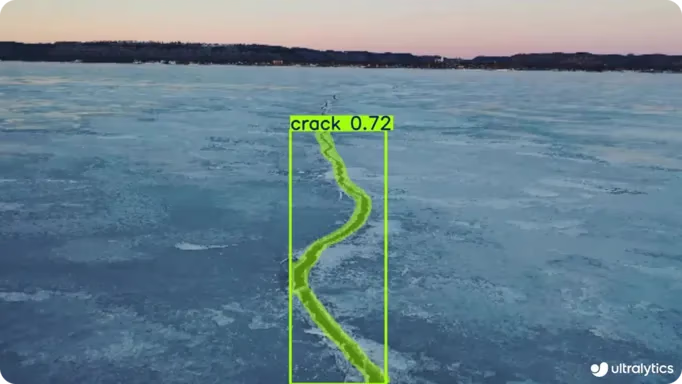
图4。YOLO11支持的裂缝分割。
Link to this section目标追踪:使用YOLO11在帧之间跟随物体#
到目前为止,我们探讨的计算机视觉任务都集中在单个图像的内容上。然而,对于视频,我们需要超出单帧的洞察。目标追踪任务可以用于此。
YOLO11的目标追踪能力可以跟随特定的物体(如人或汽车)在视频帧序列中的移动。即使摄像机角度发生变化或出现其他物体,系统也会继续跟随相同的目标。
这对于需要长时间监测的应用至关重要,例如交通中的汽车追踪。实际上,YOLO11可以精确地追踪车辆,跟随每辆车以帮助实时估算其速度。这使得目标追踪成为交通监测等系统的关键组成部分。
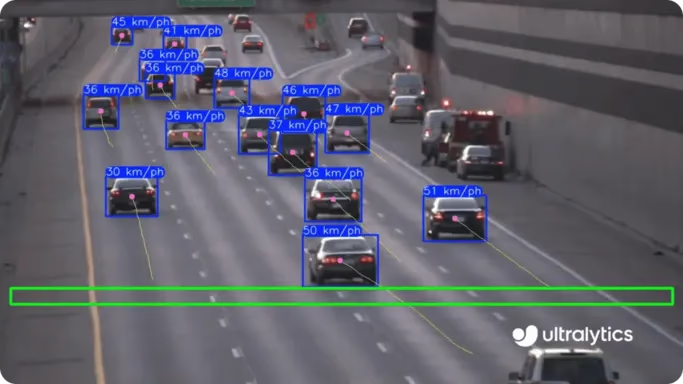
图5。 YOLO11对目标追踪的支持可用于速度估算。
Link to this section使用YOLO11检测旋转边界框(OBB)#
现实世界中的物体并不总是完全对齐的——它们可能会倾斜、侧放或以奇特的角度放置。例如,在卫星图像中,船只和建筑物通常是旋转的。
传统的目标检测方法使用固定的矩形框,无法适应物体的方向,从而难以准确捕捉这些旋转的形状。旋转边界框(OBB)检测通过使用能够旋转以紧密贴合物体周围的框来解决这个问题,使其与物体的角度对齐,从而实现更精确的检测。
在港口监测方面,YOLO11对OBB检测的支持可以帮助准确识别和追踪船舶,无论其方向如何,从而确保进出港口的每艘船只都得到妥善监测。这种精确的检测提供了关于船舶位置和移动的实时信息,这对于管理繁忙的港口和防止碰撞至关重要。

图6。使用OBB检测和YOLO11检测船只。
Link to this section姿态估计与YOLO11:追踪关键点#
姿态估计是一种计算机视觉技术,它通过追踪关键点(如关节、肢体或其他标记)来理解物体如何移动。该方法不是将整个物体或身体视为一个完整的单元,而是将其分解为各个关键部分。这使得详细分析动作、手势和交互成为可能。
这项技术的一个常见应用是人体姿态估计。通过实时追踪身体各部位的位置,它可以清晰地呈现一个人的移动方式。这些信息可用于多种目的,从手势识别和活动监测到体育中的表现分析。
同样,在物理康复中,治疗师可以使用人体姿态估计和YOLO11来监测患者在锻炼过程中的动作。这有助于确保每个动作都正确完成,同时追踪随时间推移的进展。

图7。 YOLO11可以使用姿态估计来监测锻炼过程。
Link to this section探索YOLO11如何支持各种计算机视觉任务#
既然我们已经详细探索了YOLO11支持的所有计算机视觉任务,让我们了解一下YOLO11是如何支持它们的。
YOLO11不仅仅是一个模型,它是一套专门的模型变体,每一种都专为特定的计算机视觉任务而设计。这使YOLO11成为一种可以适应广泛应用的通用工具。你还可以在自定义数据集上微调这些模型,以应对项目中独特的挑战。
以下是针对特定视觉任务预训练的YOLO11模型变体:
- YOLO11:该模型实时检测并标记多个物体,使其成为高速视觉识别的理想选择。
- YOLO11-seg:该变体通过使用详细的掩码将物体从背景中分离出来,专注于分割。
- YOLO11-obb:该模型旨在通过绘制与每个物体方向对齐的边界框来检测旋转物体。
- YOLO11-cls:该变体通过根据整体内容分配单个类别标签来对图像进行分类。
- YOLO11-pose:该模型估计身体上的关键点,以追踪姿势、肢体位置和移动。
每个变体都有不同的尺寸,允许用户根据其特定需求在速度和准确性之间做出最佳选择。
Link to this section关键要点#
计算机视觉任务正在改变机器理解世界并与世界互动的方式。通过将图像和视频分解为关键元素,这些技术使得分析物体、动作和交互变得更加容易和详细。
从提高交通安全和运动表现,到简化工业流程,像YOLO11这样的模型可以提供驱动创新的实时洞察。随着Vision AI的不断发展,它很可能在我们日常解释和使用视觉数据的方式中发挥越来越重要的作用。
加入 our community 并访问 our GitHub repository 亲眼见证 AI 的实际应用。探索 our licensing options,并在我们的解决方案页面上了解更多关于 AI in agriculture 和 computer vision in manufacturing 的信息。






