如何使用 Ultralytics YOLO11 进行 OBB 目标检测
了解 Ultralytics YOLO11 如何通过旋转边界框 (OBB) 增强目标检测能力,以及这一计算机视觉任务在哪些应用场景中表现出色。
Ultralytics’ annual hybrid event, YOLO Vision 2024 (YV24), focused on discussing the latest breakthroughs in AI and computer vision. This was the perfect occasion to introduce our newest model, Ultralytics YOLO11. The model supports the same computer vision tasks as Ultralytics YOLOv8, making the shift to the new model effortless for users.
假设你之前使用 YOLOv8 进行 定向边界框 (OBB) 物体检测 以检测不同角度的物体。现在,你只需对代码稍作修改,即可切换到 YOLO11,并受益于 YOLO11 的改进,包括精度、效率和处理速度的全面提升。如果你尚未接触 像 YOLO11 这样的模型,OBB 检测展示了 YOLO11 如何应用 于各个行业,提供能够带来实际影响的 实用解决方案。
在本文中,我们将深入探讨 什么是 OBB 物体检测、它的应用场景以及如何使用 YOLO11 来执行 OBB 检测。我们还将介绍 YOLO11 的新功能如何优化这些流程,以及如何进行推理和训练自定义模型,从而充分利用其 OBB 检测能力。
Link to this section下一代 YOLO11 功能包括 OBB 物体检测等任务#
OBB 物体检测在 传统物体检测 的基础上更进一步,能够检测不同角度的物体。与始终与图像轴对齐的普通边界框不同,OBB 会根据物体的方向进行旋转以匹配物体。OBB 物体检测可用于分析物体并不总是垂直的航拍或卫星图像。在城市规划、能源和 交通 等行业,准确检测建筑物、车辆 或基础设施等倾斜物体的能力,可以成为具备实际应用价值的 计算机视觉应用 的基础。
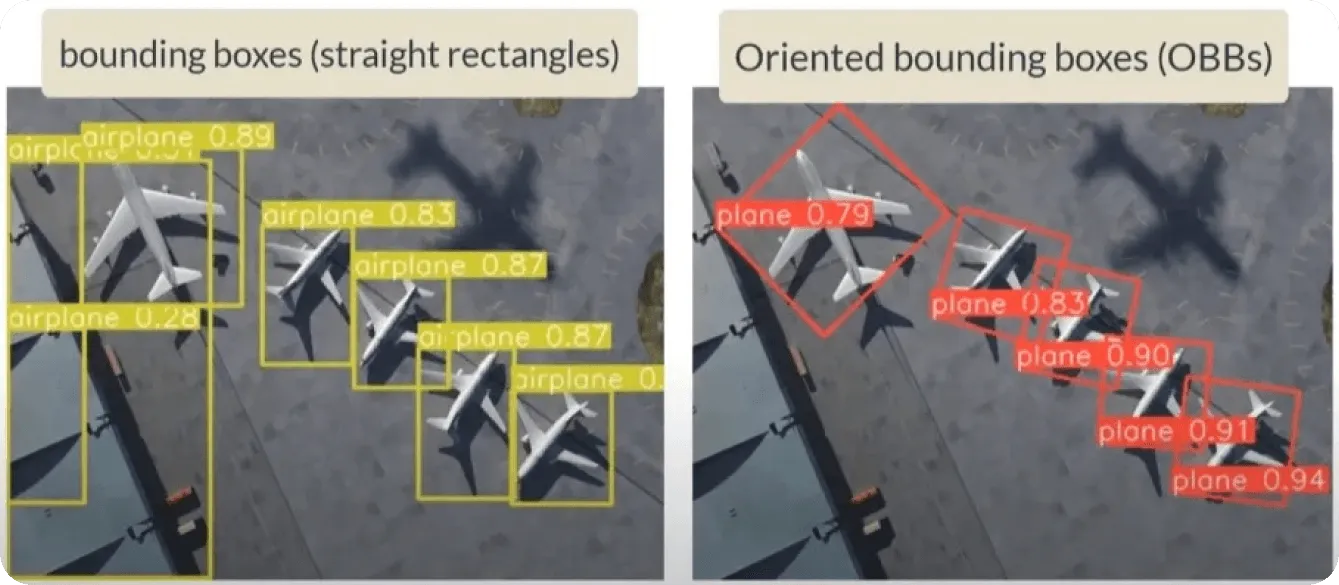
图 1. 比较普通边界框和定向边界框。
YOLO11 支持 OBB 检测,并已在 DOTA v1.0 数据集 上进行训练,能够从不同视角检测 飞机、船舶和储罐等物体。YOLO11 提供多种模型变体以满足不同需求,包括 YOLO11n-obb (Nano)、YOLO11s-obb (Small)、YOLO11m-obb (Medium)、YOLO11l-obb (Large) 和 YOLO11x-obb (Extra Large)。每种模型的大小不同,速度、精度和计算能力水平也各异。用户可以根据自己的应用需求,选择在速度和精度之间达到最佳平衡的模型。
Link to this section为物体检测带来新视角的 YOLO11 用例#
YOLO11 的物体检测能力,特别是其对定向边界框的支持,为各行业带来了更高的精度。接下来,我们将看看 YOLO11 和 OBB 检测如何在现实场景中应用,从而提高不同领域流程的效率、准确性和易管理性。
Link to this section利用 YOLO11 进行城市规划和基础设施监控#
如果你曾为某座城市的 设计与布局 感到赞叹,那要归功于 城市规划 和基础设施监控的细致工作。基础设施监控的一个重要方面是识别和管理 储罐、管道和工业区 等重要结构。YOLO11 可以帮助 城市规划者 分析航拍图像,从而快速准确地检测这些关键组件。
定向边界框物体检测在此特别有帮助,因为它能够检测从不同角度查看的物体(在航拍影像中很常见)。精确度对于追踪工业区、管理环境影响以及确保基础设施得到适当维护至关重要。OBB 使检测过程更加可靠,帮助规划者就城市的增长、安全 和 可持续性 做出明智决策。使用 YOLO11 可以帮助规划者监控和管理让城市平稳运行的基础设施。

图 2. 使用 YOLO11 检测航拍影像中的储罐。
Link to this section利用无人机、YOLO11 和边缘 AI 检测太阳能电池板#
随着 可再生能源 和太阳能电站等创新技术日趋普及,定期检查变得愈发重要。需要检查太阳能电池板以确保其有效运行。随着时间的推移,裂纹、污垢堆积或错位等问题会降低其性能。常规检查有助于及早发现这些问题,从而进行维护以保持其平稳运行。
例如,可以使用 集成边缘 AI 的无人机和 YOLO11 来检查太阳能电池板是否有损坏。在边缘端分析图像为检查过程带来了更高的精度和效率。由于无人机的运动和视角,监控影像 通常会从不同角度拍摄太阳能电池板。在这种情况下,YOLO11 的 OBB 检测可以帮助无人机准确识别太阳能电池板。
Link to this sectionYOLO11 可以为车队管理提供洞察#
港口和码头每周处理数百艘船舶,管理如此庞大的船队是一项挑战。当 分析航拍图像中的船舶 时,难度会进一步增加,因为船舶通常以不同的角度出现。这就是 YOLO11 对 OBB 检测的支持 大显身手的地方。
OBB 检测使模型比标准的矩形框更准确地检测不同角度的船舶。通过将 YOLO11 与 OBB 结合使用,航运公司可以更轻松地识别其船队的位置和状况,跟踪诸如船队移动和 供应链物流 等重要细节。这种视觉驱动的解决方案有助于优化路线、减少延误,并改善跨航线的整体船队管理。

图 3. 使用 YOLO11 以倾斜角度检测船舶和港口。
Link to this section面向 AI 开发者的 YOLO11:检测定向边界框#
如果你是一位希望使用 YOLO11 进行 OBB 检测的 AI 开发者,有两个简单的方法可以上手。如果你习惯使用代码,Ultralytics Python 软件包 是一个很好的选择。如果你更倾向于使用支持云端训练且易于使用的无代码解决方案,Ultralytics HUB 是专门为此设计的内部平台。有关更多详细信息,你可以查看我们关于 使用 Ultralytics HUB 训练和部署 Ultralytics YOLO11 的指南。
既然我们已经看到了 YOLO11 的 OBB 支持的应用示例,让我们探索一下 Ultralytics Python 软件包,看看如何使用它 运行推理 和 训练自定义模型。
Link to this section使用 YOLO11 运行推理#
首先,要在 Python 中使用 YOLO11,你需要安装 Ultralytics 软件包。根据你的偏好,你可以选择使用 pip、conda 或 Docker 进行安装。如需分步说明,请参考我们的 Ultralytics 安装指南。如果在安装过程中遇到任何困难,我们的 常见问题指南 提供了有用的故障排除提示。
安装 Ultralytics 软件包后,使用 YOLO11 非常简单。运行推理是指使用训练好的模型对新图像进行预测的过程,例如实时检测 OBB 物体。这与 模型训练 不同,后者是指教模型识别新物体或提高其在特定任务上的性能。推理是在你想要将模型应用到未见数据时使用的。
下面的示例引导你如何加载模型并使用它来预测图像上的定向边界框。如需更详细的示例和高级使用技巧,请务必查阅官方 Ultralytics 文档 以获取最佳实践和进一步的说明。
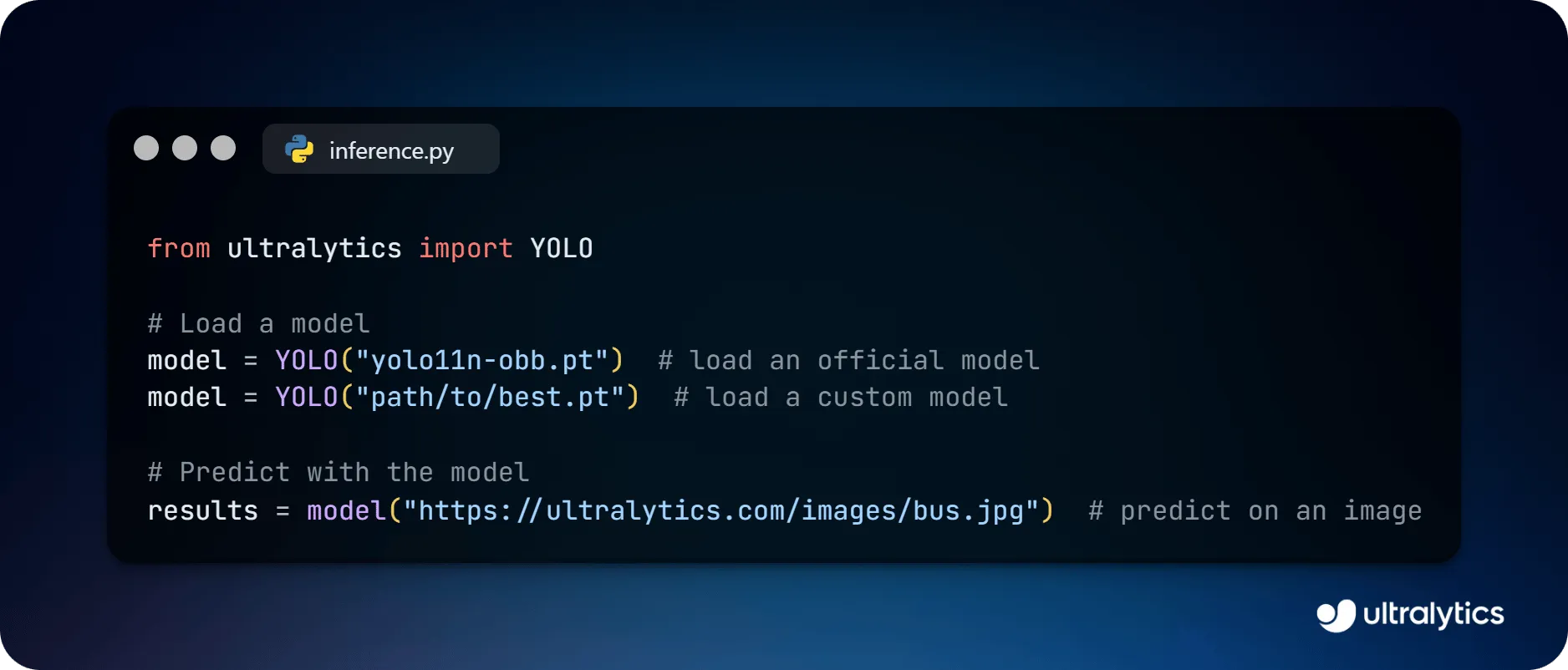
图 4. 展示使用 YOLO11 运行推理的代码片段。
Link to this section训练自定义 YOLO11 模型#
Training a YOLO11 model means you can fine-tune its performance on specific datasets and tasks, such as oriented bounding box object detection. While pre-trained models like YOLO11 can be used for general object detection, training a custom model is essential when you need the model to detect unique objects or optimize performance on a specific dataset.
在下面的代码片段中,我们涵盖了训练 YOLO11 模型进行 OBB 检测的步骤。
首先,使用预训练的 YOLO11 OBB 专用权重 (yolo11n-obb.pt) 初始化模型。然后,使用训练函数在自定义数据集上训练模型,并设置 参数,例如数据集配置文件、训练周期数、训练图像大小以及 运行训练的硬件(例如 CPU 或 GPU)。训练完成后,验证 模型的性能 以检查精度和损失等指标。
使用训练好的模型,你可以对新图像运行推理以 检测带有 OBB 的物体并将其可视化。此外,训练好的模型可以转换为 ONNX 等格式,以便使用 导出功能 进行部署。
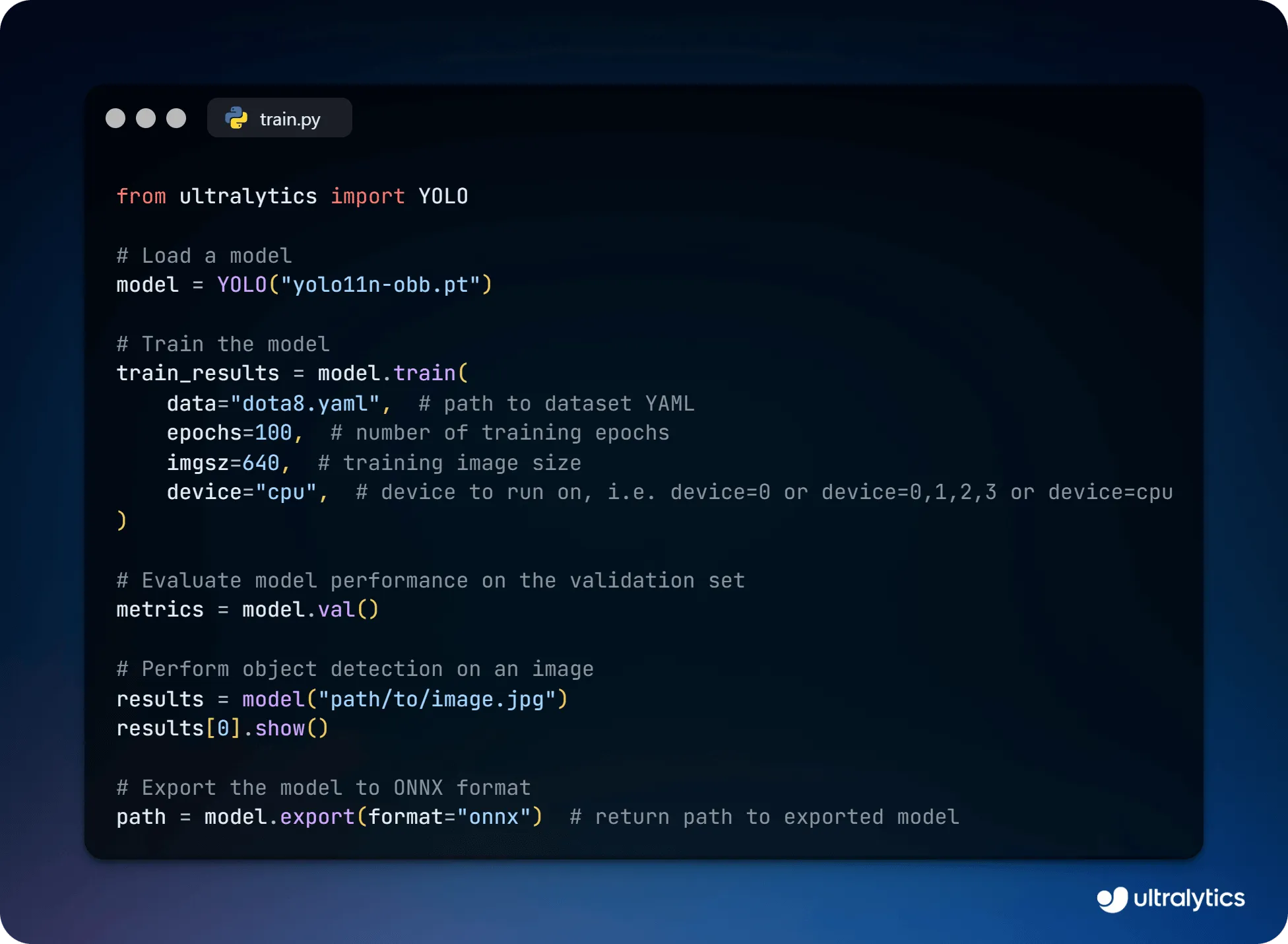
图 5. 训练 YOLO11 进行 OBB 物体检测的示例。
Link to this sectionYOLO11 AI 进步的发展路径#
Ultralytics YOLO11 通过支持定向边界框将物体检测提升到了一个新的水平。凭借检测不同角度物体的能力,YOLO11 可用于各行各业的各种应用。例如,它非常适合城市规划、能源和航运等行业,在这些行业中,精度对于太阳能电池板检查或船队监控等任务至关重要。凭借更快的性能和更高的精度,YOLO11 可以帮助 AI 开发者解决现实世界的挑战。
随着 AI 得到更广泛的应用并融入我们的日常生活,像 YOLO11 这样的模型将塑造 AI 解决方案的未来。
要了解视觉 AI 的潜力,请加入我们不断壮大的 社区 并探索我们的 GitHub 存储库。我们正在通过重塑 医疗保健 到 自动驾驶汽车 等领域来推动创新。






