كل ما تحتاج لمعرفته حول مهام الرؤية الحاسوبية
تعرّف على كيفية عمل مهام الرؤية الحاسوبية مثل تتبع الأشياء، وتجزئة المثيل، وتصنيف الصور، وكيف يدعمها Ultralytics YOLO11.
بفضل الكاميرات والتطورات في الذكاء الاصطناعي (AI)، أصبحت أجهزة الكمبيوتر والآلات قادرة الآن على رؤية العالم بطريقة تشبه الطريقة التي يرى بها البشر. على سبيل المثال، يمكنها التعرف على الأشخاص، وتتبع الأجسام، وحتى فهم سياق ما يحدث في الفيديو.
على وجه التحديد، الرؤية الحاسوبية هي فرع من فروع الذكاء الاصطناعي الذي يُمكّن الآلات من فهم وتفسير المعلومات المرئية من العالم المحيط بها. تتضمن الرؤية الحاسوبية مجموعة متنوعة من المهام، صُممت كل منها لاستخراج نوع معين من الرؤى من الصور أو مقاطع الفيديو. على سبيل المثال، يساعد اكتشاف الأجسام في تحديد وتحديد مواقع عناصر مختلفة في صورة ما، بينما تساعد مهام أخرى مثل التتبع، والتجزئة، وتقدير الوضعية الآلات على فهم الحركة والأشكال والمواقع بدقة أكبر.
تعتمد مهمة الرؤية الحاسوبية المستخدمة لتطبيق معين على نوع الرؤى التي تحتاجها. تدعم نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 مهام رؤية حاسوبية متنوعة، مما يجعلها خياراً موثوقاً لبناء أنظمة الذكاء الاصطناعي الرؤي في العالم الحقيقي.
في هذا الدليل، سنلقي نظرة فاحصة على مهام الرؤية الحاسوبية التي تدعمها نماذج مثل YOLO11. سنستكشف كيفية عمل كل مهمة وكيف يتم استخدامها عبر مختلف الصناعات. لنبدأ!
Link to this sectionما هي مهام الرؤية الحاسوبية؟#
تهدف مهام الرؤية الحاسوبية إلى محاكاة قدرات الرؤية البشرية بطرق مختلفة. يمكن أن تساعد هذه المهام الآلات في اكتشاف الأجسام، وتتبع حركاتها، وتقدير الوضعيات، وحتى تحديد العناصر الفردية في الصور ومقاطع الفيديو. عادةً ما يتم تمكين مهام الرؤية الحاسوبية بواسطة نماذج تقوم بتقسيم البيانات المرئية إلى أجزاء أصغر حتى تتمكن من تفسير ما يحدث بشكل أوضح.
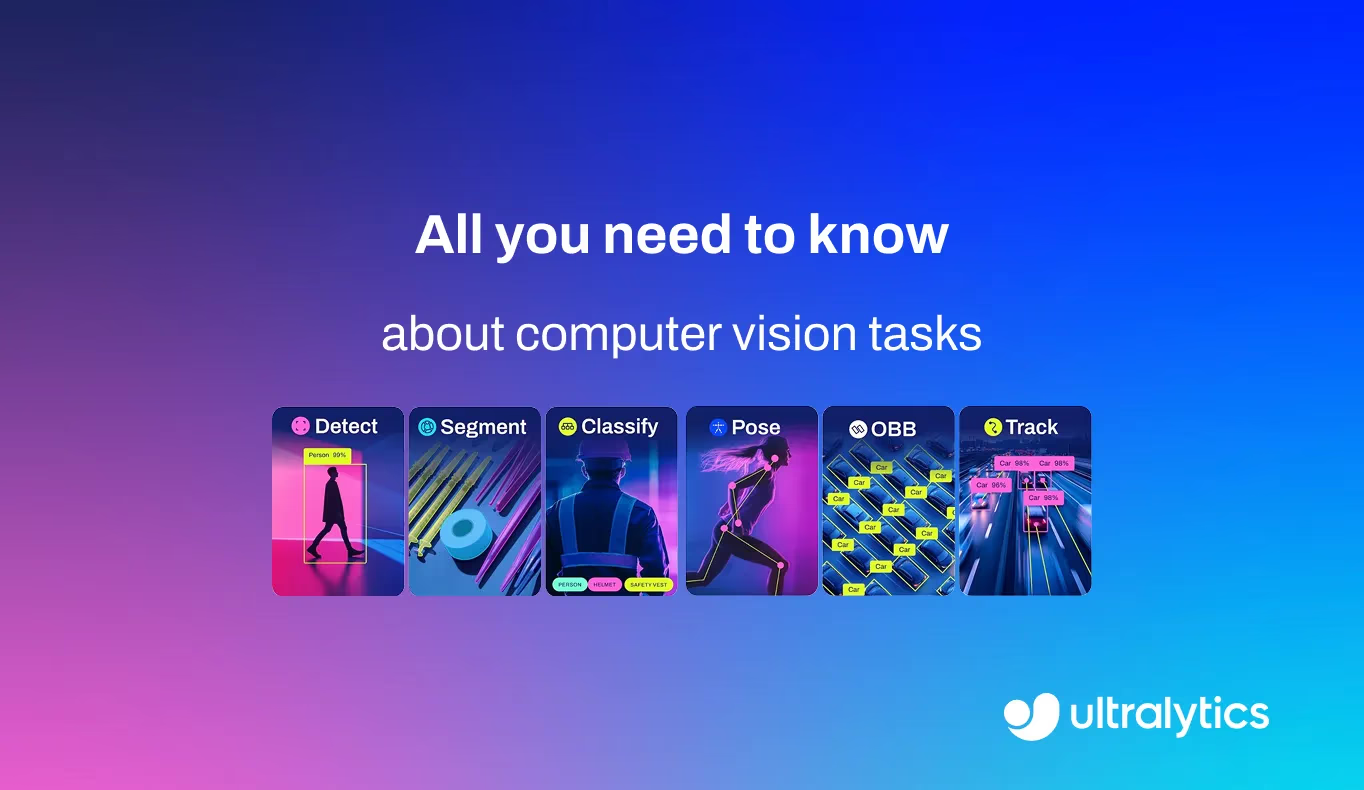
نماذج Vision AI مثل نماذج Ultralytics YOLO تدعم مهاماً متعددة، مثل الاكتشاف والتتبع والتجزئة، في إطار عمل واحد. وبفضل هذا التنوع، يسهل اعتماد نماذج YOLO11 لمجموعة واسعة من حالات الاستخدام.

الشكل 1. مهام الرؤية الحاسوبية التي يدعمها YOLO11.
مثال جيد على ذلك هو في تحليلات الرياضة. يمكن استخدام YOLO11 لاكتشاف كل لاعب في الملعب باستخدام اكتشاف الأجسام، ثم يمكنه متابعتهم طوال المباراة باستخدام تتبع الأجسام. في الوقت نفسه، يمكن لقدرات تقدير الوضعية في YOLO11 المساعدة في تحليل حركات اللاعبين وتقنياتهم، ويمكن لتجزئة المثيل فصل كل لاعب عن الخلفية، مما يضيف دقة إلى التحليل.
معاً، تخلق مهام الرؤية الحاسوبية هذه التي يدعمها YOLO11 صورة كاملة لما يحدث أثناء المباراة، مما يمنح الفرق رؤى أعمق حول أداء اللاعبين والتكتيكات والاستراتيجية العامة.
Link to this sectionنظرة عامة على مهام الرؤية الحاسوبية التي يدعمها YOLO11#
الآن بعد أن ألقينا نظرة على ماهية مهام الرؤية الحاسوبية، دعنا نتعمق في فهم كل منها بدعم من YOLO11 بمزيد من التفصيل، باستخدام أمثلة من العالم الحقيقي.
Link to this sectionدعم YOLO11 لتصنيف الصور#
عندما تنظر إلى صورة، يمكن لمعظم الناس معرفة ما إذا كانت تظهر كلباً أو جبلاً أو علامة مرور بسهولة لأننا تعلمنا جميعاً كيف تبدو هذه الأشياء عادةً. يساعد تصنيف الصور الآلات على فعل الشيء نفسه من خلال تعليمها كيفية تصنيف وتوسيم صورة بناءً على كائنها الرئيسي - سواء كان "سيارة" أو "موزة" أو "صورة أشعة إكس مع كسر". يساعد هذا الملصق أنظمة الرؤية الحاسوبية على فهم المحتوى المرئي حتى تتمكن من الاستجابة أو اتخاذ القرارات وفقاً لذلك.
أحد التطبيقات المثيرة للاهتمام لهذه المهمة في الرؤية الحاسوبية هو مراقبة الحياة البرية. يمكن استخدام تصنيف الصور لتحديد أنواع الحيوانات المختلفة من الصور الملتقطة في البرية. من خلال وضع ملصقات تلقائية على الصور، يمكن للباحثين تتبع المجموعات السكانية، ومراقبة أنماط الهجرة، وتحديد الأنواع المهددة بالانقراض بسهولة أكبر لدعم جهود الحفاظ على البيئة.

الشكل 2. مثال على استخدام YOLO11 لتصنيف الصور.
Link to this sectionقدرات اكتشاف الأجسام في YOLO11#
بينما يعد تصنيف الصور مفيداً للحصول على فكرة عامة عما تحتويه الصورة، فإنه يعين ملصقاً واحداً فقط للصورة بأكملها. في المواقف التي تتطلب معلومات مفصلة، مثل الموقع الدقيق وهوية أجسام متعددة، يصبح اكتشاف الأجسام أمراً ضرورياً.
اكتشاف الأجسام هو عملية تحديد وتحديد مواقع الأجسام الفردية داخل صورة، غالباً عن طريق رسم صناديق حدودية حولها. يعمل Ultralytics YOLO11 بشكل جيد بشكل خاص في اكتشاف الأجسام في الوقت الفعلي، مما يجعله مثالياً لمجموعة واسعة من التطبيقات.
خذ على سبيل المثال، حلول الرؤية الحاسوبية المستخدمة في متاجر التجزئة لتخزين الرفوف. يمكن أن يساعد اكتشاف الأجسام في عد الفواكه والخضروات وغيرها من العناصر، مما يضمن مخزوناً دقيقاً. في الحقول الزراعية، يمكن لنفس التكنولوجيا مراقبة نضج المحاصيل لمساعدة المزارعين على تحديد أفضل وقت للحصاد، حتى التمييز بين المنتجات الناضجة وغير الناضجة.
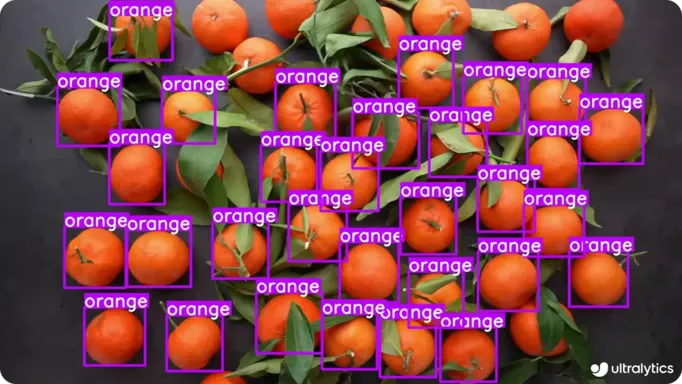
الشكل 3. اكتشاف الفواكه باستخدام Ultralytics YOLO11.
Link to this sectionاستخدام YOLO11 لتجزئة المثيل#
يستخدم اكتشاف الأجسام صناديق حدودية لتحديد وتحديد مواقع الأجسام في صورة، لكنه لا يلتقط أشكالها الدقيقة. هذا هو المكان الذي يأتي فيه تجزئة المثيل. بدلاً من رسم صندوق حول جسم ما، تتبع تجزئة المثيل مخططها الدقيق.
يمكنك التفكير في الأمر على هذا النحو: بدلاً من مجرد الإشارة إلى أن "هناك تفاحة في هذه المنطقة"، فإنه يحدد بعناية ويملأ الشكل الدقيق للتفاحة. تساعد هذه العملية التفصيلية أنظمة الذكاء الاصطناعي على فهم حدود الجسم بوضوح، خاصة عندما تكون الأجسام قريبة من بعضها البعض.
يمكن تطبيق تجزئة المثيل على العديد من التطبيقات، من عمليات تفتيش البنية التحتية إلى المسوحات الجيولوجية. على سبيل المثال، يمكن تحليل البيانات من المسوحات الجيولوجية باستخدام YOLO11 لتجزئة الشقوق السطحية الكبيرة والصغيرة أو التشوهات. من خلال رسم حدود دقيقة حول هذه الشذوذات، يمكن للمهندسين تحديد المشكلات ومعالجتها قبل بدء المشروع.
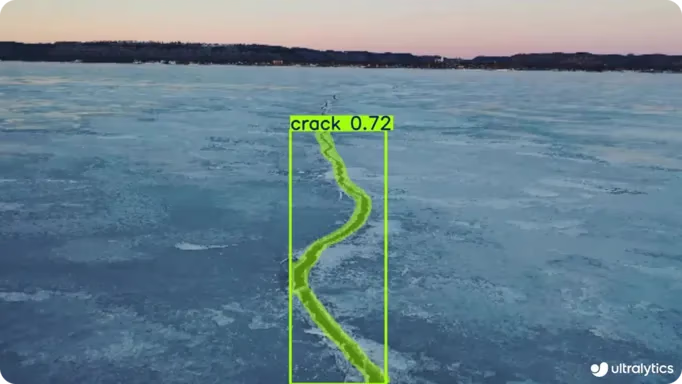
الشكل 4. تجزئة الشقوق المدعومة بـ YOLO11.
Link to this sectionتتبع الأجسام: متابعة الأجسام عبر الإطارات باستخدام YOLO11#
حتى الآن، ركزت مهام الرؤية الحاسوبية التي نظرنا إليها على ما هو موجود في صورة واحدة. ومع ذلك، عندما يتعلق الأمر بمقاطع الفيديو، فنحن بحاجة إلى رؤى تتجاوز إطاراً واحداً. يمكن استخدام المهمة، تتبع الأجسام، لهذا الغرض.
يمكن لقدرة تتبع الأجسام في YOLO11 متابعة جسم معين، مثل شخص أو سيارة، أثناء تحركه عبر سلسلة من إطارات الفيديو. حتى إذا تغيرت زاوية الكاميرا أو ظهرت أجسام أخرى، يستمر النظام في متابعة نفس الهدف.
هذا أمر بالغ الأهمية للتطبيقات التي تتطلب مراقبة بمرور الوقت، مثل تتبع السيارات في حركة المرور. في الواقع، يمكن لـ YOLO11 تتبع المركبات بدقة، ومتابعة كل سيارة للمساعدة في تقدير سرعتها في الوقت الفعلي. هذا يجعل تتبع الأجسام مكوناً رئيسياً في أنظمة مثل مراقبة حركة المرور.
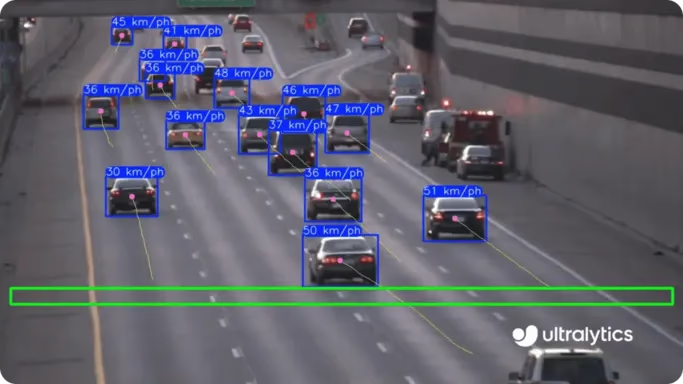
الشكل 5. يمكن استخدام دعم YOLO11 لتتبع الأجسام لتقدير السرعة.
Link to this sectionاكتشاف الصناديق الحدودية الموجهة (OBB) باستخدام YOLO11#
لا تكون الأجسام في العالم الحقيقي دائماً محاذية بشكل مثالي - فقد تكون مائلة أو جانبية أو موضوعة بزوايا غريبة. على سبيل المثال، في صور الأقمار الصناعية، غالباً ما تظهر السفن والمباني مدورة.
تستخدم طرق اكتشاف الأجسام التقليدية صناديق مستطيلة ثابتة لا تتكيف مع اتجاه الجسم، مما يجعل من الصعب التقاط هذه الأشكال المدورة بدقة. يحل اكتشاف الصندوق الحدودي الموجه (OBB) هذه المشكلة باستخدام صناديق تدور لتناسب بإحكام حول جسم ما، وتتماشى مع زاويته لاكتشاف أكثر دقة.
فيما يتعلق بمراقبة الميناء، يمكن لدعم YOLO11 لاكتشاف OBB المساعدة في تحديد وتتبع السفن بدقة بغض النظر عن اتجاهها، مما يضمن مراقبة كل سفينة تدخل أو تغادر الميناء بشكل صحيح. يوفر هذا الاكتشاف الدقيق معلومات في الوقت الفعلي عن مواقع السفن وحركاتها، وهو أمر بالغ الأهمية لإدارة الموانئ المزدحمة ومنع التصادمات.

الشكل 6. اكتشاف القوارب باستخدام اكتشاف OBB و YOLO11.
Link to this sectionتقدير الوضعية و YOLO11: تتبع النقاط الرئيسية#
تقدير الوضعية هو تقنية رؤية حاسوبية تتعقب النقاط الرئيسية، مثل المفاصل أو الأطراف أو علامات أخرى، لفهم كيفية تحرك الجسم. بدلاً من التعامل مع جسم أو جسد كامل كوحدة واحدة، تقوم هذه الطريقة بتقسيمه إلى أجزائه الرئيسية. هذا يجعل من الممكن تحليل الحركات والإيماءات والتفاعلات بالتفصيل.
أحد التطبيقات الشائعة لهذه التكنولوجيا هو تقدير وضعية الإنسان. من خلال تتبع مواقع أجزاء الجسم المختلفة في الوقت الفعلي، فإنه يوفر صورة واضحة لكيفية تحرك الشخص. يمكن استخدام هذه المعلومات لأغراض متنوعة، من التعرف على الإيماءات ومراقبة النشاط إلى تحليل الأداء في الرياضة.
وبالمثل، في إعادة التأهيل البدني، يمكن للمعالجين استخدام تقدير وضعية الإنسان و YOLO11 لمراقبة حركات المرضى أثناء التمارين. يساعد هذا في التأكد من إجراء كل حركة بشكل صحيح مع تتبع التقدم بمرور الوقت.

الشكل 7. يمكن لـ YOLO11 مراقبة تمرين باستخدام تقدير الوضعية.
Link to this sectionاستكشاف كيف يدعم YOLO11 مهام الرؤية الحاسوبية المختلفة#
الآن بعد أن استكشفنا جميع مهام الرؤية الحاسوبية التي يدعمها YOLO11 بالتفصيل، دعنا نمر عبر كيفية دعم YOLO11 لها.
YOLO11 ليس مجرد نموذج واحد - إنه مجموعة من متغيرات النماذج المتخصصة، صُمم كل منها لمهمة رؤية حاسوبية محددة. هذا يجعل YOLO11 أداة متعددة الاستخدامات يمكن تكييفها مع مجموعة واسعة من التطبيقات. يمكنك أيضاً ضبط هذه النماذج بدقة على مجموعات بيانات مخصصة لمعالجة التحديات الفريدة لمشاريعك.
فيما يلي متغيرات نموذج YOLO11 المدربة مسبقاً لمهام رؤية محددة:
- YOLO11: يكتشف هذا النموذج أجساماً متعددة ويضع عليها ملصقات في الوقت الفعلي، مما يجعله مثالياً للتعرف المرئي عالي السرعة.
- YOLO11-seg: يركز هذا المتغير على التجزئة باستخدام أقنعة مفصلة لفصل الأجسام عن خلفياتها.
- YOLO11-obb: صُمم هذا النموذج لاكتشاف الأجسام المدورة عن طريق رسم صناديق حدودية تتماشى مع اتجاه كل جسم.
- YOLO11-cls: يصنف هذا المتغير الصور عن طريق تعيين ملصق فئة واحد بناءً على المحتوى العام.
- YOLO11-pose: يقدر هذا النموذج النقاط الرئيسية على الجسم لتتبع الوضعية، ومواقع الأطراف، والحركة.
كل متغير متاح بأحجام مختلفة، مما يسمح للمستخدمين باختيار التوازن الصحيح بين السرعة والدقة لاحتياجاتهم المحددة.
Link to this sectionأبرز النقاط#
تغير مهام الرؤية الحاسوبية الطريقة التي تفهم بها الآلات العالم وتتفاعل معه. من خلال تقسيم الصور ومقاطع الفيديو إلى عناصر رئيسية، تجعل هذه التقنيات من السهل تحليل الأجسام والحركات والتفاعلات بالتفصيل.
من تحسين السلامة المرورية والأداء الرياضي إلى تبسيط العمليات الصناعية، يمكن لنماذج مثل YOLO11 توفير رؤى في الوقت الفعلي تدفع الابتكار. مع استمرار تطور الذكاء الاصطناعي الرؤي، من المرجح أن يلعب دوراً متزايد الأهمية في كيفية تفسيرنا واستخدامنا للبيانات المرئية كل يوم.
انضم إلى مجتمعنا وقم بزيارة مستودع GitHub الخاص بنا لرؤية الذكاء الاصطناعي في العمل. استكشف خيارات الترخيص الخاصة بنا واكتشف المزيد حول الذكاء الاصطناعي في الزراعة ورؤية الكمبيوتر في التصنيع على صفحات الحلول الخاصة بنا.






