Ultralytics YOLO11 作为无锚点检测器的优势
了解 Ultralytics YOLO11 如何支持无锚点目标检测,以及该模型架构为各种应用带来的益处。

回顾视觉 AI 模型的发展史,目标检测——这一涉及在图像或视频中识别并定位物体的核心计算机视觉任务——的概念自 20 世纪 60 年代以来就已存在。然而,它之所以能在当今的前沿创新中占据重要地位,关键在于目标检测技术和模型架构自那时起已经取得了飞速的进步与优化。
在之前的文章中,我们探讨了目标检测的演进以及 Ultralytics YOLO 模型的发展历程。今天,我们将聚焦于这一历程中的一个具体里程碑:从基于锚点的检测器向无锚点检测器的跨越。
基于锚点的检测器依赖于预定义的边框(称为“锚点”)来预测物体在图像中的位置。相比之下,无锚点检测器跳过了这些预定义的边框,直接预测物体的位置。
虽然这种转变看起来只是一个简单且合乎逻辑的变化,但它实际上极大地提升了目标检测的准确性和效率。在本文中,我们将深入了解无锚点检测器如何通过 Ultralytics YOLO11 等技术进步重塑计算机视觉。
Link to this section什么是基于锚点的检测器?#
基于锚点的检测器使用被称为锚点的预定义边框来帮助定位图像中的物体。你可以将这些锚点想象成覆盖在图像上的一系列不同大小和形状的网格。然后,模型会调整这些边框以适配它检测到的物体。例如,如果模型识别出一辆汽车,它会修改锚点框,以便更准确地匹配汽车的位置和大小。
每个锚框 (anchor) 都与图像中可能存在的物体相关联。在 training 期间,模型会学习如何调整这些锚框,以便更好地匹配物体的位置、大小和长宽比。这使得模型能够以不同的比例和方向 detect objects。然而,选择合适的锚框集合可能会很耗时,而且对它们进行微调的过程也容易出错。
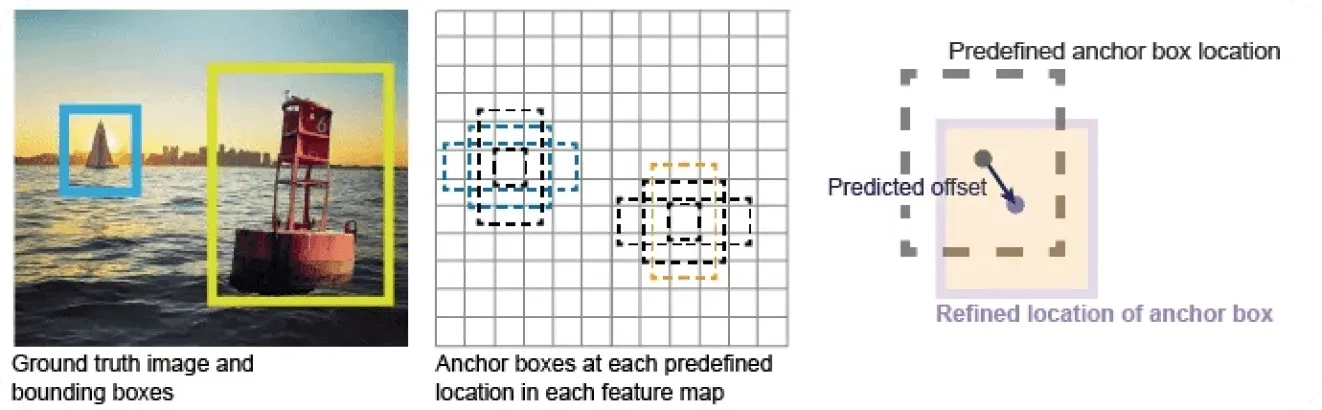
图 1. 什么是锚点框?
虽然YOLOv4 等基于锚点的检测器在许多应用中表现良好,但它们也存在一些缺陷。例如,锚点框并不总是能很好地与各种形状或大小的物体对齐,这使得模型更难检测到较小或形状不规则的物体。选择和微调锚点框大小的过程也可能非常耗时,并需要大量的人工介入。此外,基于锚点的模型在检测被遮挡或重叠的物体时往往表现不佳,因为预定义的边框可能无法很好地适应这些复杂场景。
Link to this section向无锚点目标检测的转变#
无锚点检测器在 2018 年开始受到关注,当时出现了 CornerNet 和 CenterNet 等模型,它们通过消除对预定义锚点框的需求,为目标检测提供了一种全新的方案。与依赖不同尺寸和形状的锚点框来预测物体位置的传统模型不同,无锚点模型直接预测物体的位置。它们专注于物体的关键点或特征(如中心点),这简化了检测过程,并提高了速度和准确性。
以下是无锚点模型通常的工作原理:
- Keypoint detection:有些模型不是使用预定义的框,而是识别物体上的重要点,例如中心点或特定的角点。这些关键点有助于模型判断物体的位置及其大小。
- 中心 prediction:有些模型专注于预测物体的中心。一旦确定了中心位置,模型就可以从该点预测整个物体的大小和位置。
- 热图回归 (Heatmap regression):许多无锚 (anchor-free) 模型使用 heatmaps,其中每个像素代表物体的一个可能位置。热图数值越高,表示该点存在物体的置信度越高。
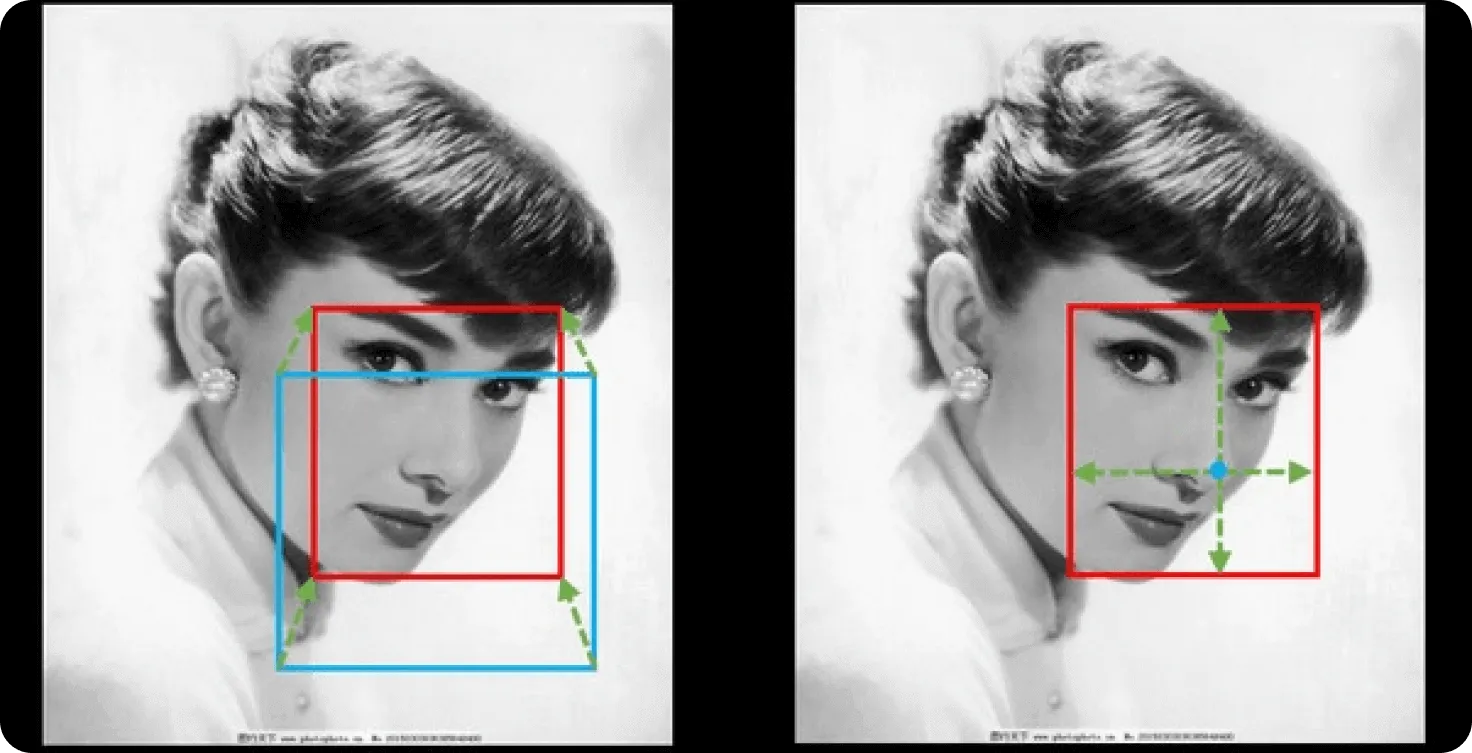
图 2. 基于锚点的检测与无锚点检测的对比。
由于无锚点模型不依赖锚点框,它们的设计更简洁,这意味着它们的计算效率更高。由于无需处理多个锚点框,它们能更快速地检测物体——这在自动驾驶和视频监控等实时应用中是一项重要优势。
无锚点模型在处理较小、不规则或被遮挡的物体时也表现更好。由于它们专注于检测关键点而不是尝试拟合锚点框,因此它们具有更高的灵活性。这使得它们能够在基于锚点的模型可能失败的杂乱或复杂环境中准确地检测物体。
Link to this sectionUltralytics YOLO11:一种无锚点检测器#
YOLO 模型最初是为了速度和效率而设计的,现已逐渐从基于锚点的方法转向无锚点检测,使得 YOLO11 等模型更快、更灵活,并且更适合各种实时应用。
以下简要概述了无锚点设计在不同 YOLO 版本中的演变:
- Ultralytics YOLOv5u:引入了无锚点拆分 Ultralytics Head,消除了对预定义锚点框的需求。相反,模型直接预测物体在图像中的位置,简化了流程并提高了灵活性和速度。
- YOLOv6:使用了名为锚点辅助训练 (AAT) 的新方法,其中锚点仅在训练期间使用。这使得模型在训练过程中能够受益于基于锚点的方法的结构,同时在推理时使用无锚点检测,以获得更好的速度和适应性。
- Ultralytics YOLOv8:通过使用无锚点拆分 Ultralytics Head,完全切换到了无锚点检测。这使得模型更快且更准确,特别是对于那些与锚点框不匹配的小型或形状奇特的物体。
- Ultralytics YOLO11:在 YOLOv8 的无锚点方法基础上进行优化,通过完全消除锚点框进一步提升了检测性能。这为动物行为监测和零售分析等实时应用带来了更快、更精确的检测结果。
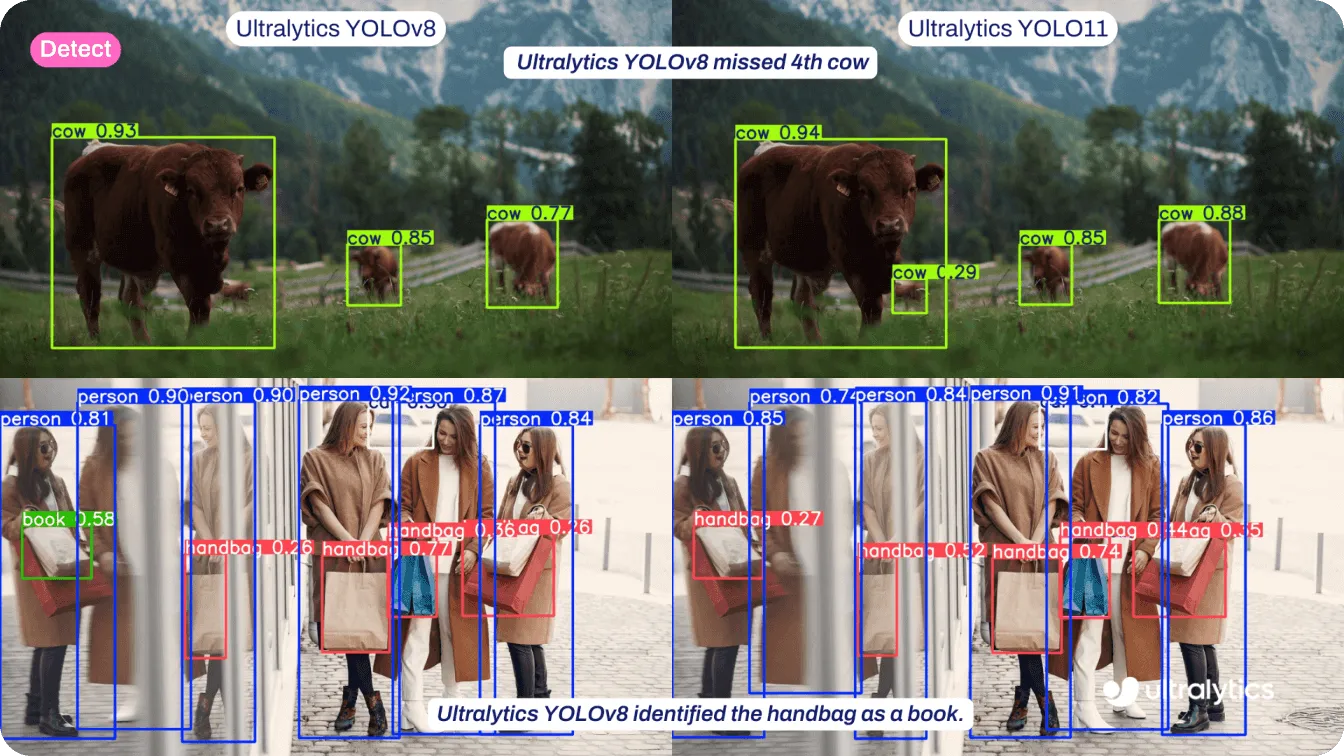
图 3. 比较 Ultralytics YOLOv8 和 Ultralytics YOLO11。
Link to this sectionYOLO11 的实际应用#
在自动驾驶汽车领域,YOLO11 的无锚点检测优势得到了很好的体现。在自动驾驶汽车中,快速准确地检测行人、其他车辆和障碍物对安全至关重要。YOLO11 的无锚点方法通过直接预测物体的关键点(例如行人的中心或车辆的边界)简化了检测过程,而不是依赖于预定义的锚点框。

图 4. YOLO11 中无锚点检测的优势(图片来自作者)。
YOLO11 无需为每个物体调整或拟合锚点网格,这原本是计算密集且缓慢的。相反,它专注于关键特征,从而使其更快、更高效。例如,当行人进入车辆路径时,即使行人部分被遮挡或在移动,YOLO11 也能通过精确定位关键点快速识别其位置。这种无需锚点框即可适应各种形状和大小的能力使 YOLO11 能更可靠、更快速地检测物体,这对自动驾驶系统的实时决策至关重要。
YOLO11 的无锚点能力大放异彩的其他应用包括:
- 零售与库存管理:YOLO11 使得监控货架上的产品变得更容易,即使它们堆叠或部分被遮挡。这有助于实现更快、更准确的库存跟踪并减少错误。
- 医学影像:YOLO11 在医疗保健领域也非常有效,它可以检测医学扫描中的肿瘤或其他异常。其处理形状不规则物体的能力有助于提高对复杂疾病诊断的准确性。
- 野生动物监测:在野生动物研究中,YOLO11 可以在茂密的森林或复杂地形中跟踪动物,帮助研究人员监测行为或保护濒危物种。
- 体育分析:YOLO11 可用于在体育赛事期间实时跟踪运动员、球的移动或其他元素,从而为团队、教练和广播公司提供有价值的洞察。
Link to this section使用无锚点模型时的注意事项#
虽然 YOLO11 等无锚点模型提供了许多优势,但它们确实存在一些局限性。主要实际考虑因素之一是,即使是无锚点模型,在处理遮挡或高度重叠的物体时也可能遇到困难。其背后的逻辑是,计算机视觉旨在复制人类视觉,正如我们有时难以识别被遮挡的物体一样,AI 模型也会面临类似的挑战。
另一个有趣的因素与模型预测的处理有关。虽然无锚点模型架构比基于锚点的模型更简洁,但在某些情况下仍需要进行额外的细化。例如,可能需要使用非极大值抑制 (NMS) 等后处理技术来清理重叠的预测或提高拥挤场景下的准确性。
Link to this section通过 YOLO11 锚定 AI 的未来#
从基于锚点向无锚点检测的转变是目标检测领域的一项重大进步。通过像 YOLO11 这样的无锚点模型,流程得到了简化,从而在准确性和速度上都有所提升。
通过 YOLO11,我们看到无锚点目标检测如何在自动驾驶汽车、视频监控和医学影像等实时应用中大放异彩,在这些领域,快速且精确的检测至关重要。这种方法使 YOLO11 能够更容易地适应不同的物体尺寸和复杂场景,从而在各种环境中提供更好的性能。
随着计算机视觉的持续演进,目标检测只会变得更快、更灵活且更高效。
探索我们的 GitHub 存储库 并加入我们的社区,以了解 AI 的最新动态。查看视觉 AI 如何影响制造业和农业等行业。






