探索导航应用中的计算机视觉
了解导航解决方案中的计算机视觉如何通过实时地图、对象识别和增强现实,实现更智能、更安全的旅行体验。

如今,掏出手机、输入目的地并按照逐步导航到达目的地,这一切显得轻而易举。只需要几秒钟就能完成。但这种日常的便利是多年技术进步的结果。从纸质地图和指南针到能够实时理解并响应世界的智能系统,导航已经取得了长足的进步。
推动这一转变的技术之一是 计算机视觉,这是人工智能 (AI) 的一个分支,允许机器像人类一样解释视觉信息。尖端的导航工具现在利用来自卫星、行车记录仪和街道传感器获取的实时图像来提高地图准确性、监控路况并引导用户穿过复杂的环境。
在本文中,我们将探讨计算机视觉如何通过改进 GPS 地图、提供实时交通更新以及支持增强现实导航和自动驾驶汽车等技术来增强导航功能。
Link to this section具备沉浸式 3D 测绘功能的 AI 导航系统#
使用 Google Maps 等工具进行日常导航已经非常普遍,无论你是要穿过城镇还是寻找附近的咖啡馆。随着 AI 技术的普及,我们看到了越来越多先进的功能,例如 Google Maps 在 2023 年推出的 沉浸式视图,它允许用户在 3D 环境中预览行程的部分内容。这是通过 AI、摄影测量法和计算机视觉的结合实现的。
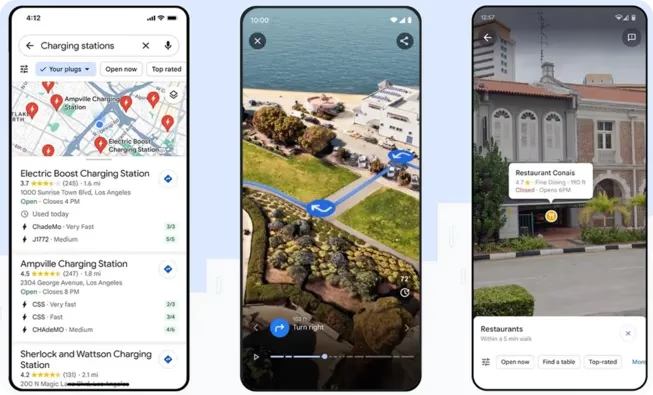
图 1。Google Maps 的沉浸式视图。
这一切始于由各种专业设备捕获的数十亿张高分辨率图像。这包括 Street View 汽车(配备 360 度摄像头的车辆,它们在城市中行驶)以及 Trekker 设备(带有安装摄像头的可穿戴背包,用于捕获车辆无法到达的地方的图像,如徒步小径或狭窄小巷)。
这些图像使用摄影测量法与地图数据对齐,这是一种将从不同角度拍摄的 2D 照片拼接在一起,从而创建街道、建筑物和地形精确 3D 模型的技术。
然后,计算机视觉通过对象检测和 图像分割 来分析这些模型,以识别并标记重要的特征,例如路标、人行道、斑马线和建筑物入口。

图 2。沉浸式视图使用分割来分割街道上的对象。
标记的数据用于训练能识别视觉线索在不同地区有何差异的 AI 系统。例如,系统可以轻松区分美国的“SLOW”(减速)标志(通常是黄色或橙色菱形)和日本类似的标志(通常是红白相间的三角形)。这种理解水平使得导航体验更加准确且具有文化认知。
最后,沉浸式视图将实时导航路径叠加到 3D 环境中,提供流畅、直观的体验,让你清楚地看到目的地。
Link to this section导航解决方案中的增强现实#
我们可能都经历过原地转圈并试图弄清楚 Google Maps 指向哪个方向的情况。这种困惑正是 增强现实 (AR) 导航旨在解决的问题,这是一种将数字信息叠加到现实世界相机视图上的技术。它正在改变人们在城市街道或大型室内区域等繁忙场所寻找方向的方式。
普通地图可能很难跟随,尤其是在 GPS 信号微弱或无法正常工作时。AR 导航通过在真实世界的实时相机视图上直接显示数字方向、箭头和标签来解决这个问题。这意味着用户看到的引导与周围的街道和建筑物相匹配,从而更容易知道往哪里走。
Link to this section增强现实如何在导航中使用#
AR 导航依赖于 计算机视觉模型 通过设备的摄像头来理解环境。这涉及各种任务,例如图像定位(检测建筑物边缘或路标等特征并将其与存储的地图进行匹配)。即时定位与地图构建 (SLAM) 在追踪设备实时位置的同时创建环境地图。
例如,苏黎世机场 是首个实施 Google Maps Live View 进行室内导航的机场。乘客可以使用手机摄像头查看叠加在现实环境中的箭头和方向,引导他们穿过航站楼前往登机口、商店和服务点。这使得在复杂的室内空间导航变得更容易,从而改善了乘客体验。

图 3。苏黎世机场正在使用计算机视觉和 AR 在室内引导乘客。
Link to this section利用 AI 导航系统提升道路安全#
城市街道每天都变得越来越繁忙。随着路上车辆的增加、拥挤的人行道和不断的活动,保持交通顺畅和安全成为一个日益严峻的挑战。为了帮助管理混乱,许多城市正转向 AI 和计算机视觉。
智能摄像头 和安装在十字路口及道路沿线的传感器捕获源源不断的视觉数据。这些影像会被实时处理,以检测事故、监控交通流量、发现坑洼并捕捉违章停车或危险行人行为等情况。
中国杭州的 智能机场高速公路 就是一个有趣的例子。这条连接杭州市中心到萧山国际机场的 20 公里高速公路,已经升级为配备了高分辨率摄像头和毫米波雷达。这些设备持续收集视频和传感器数据,然后使用计算机视觉进行分析。
该系统不仅记录影像,还能解读路面上发生的情况。计算机视觉算法可以检测车辆碰撞、识别交通违规,甚至识别高速公路出口附近的行人或异常移动。这使得交通官员无需亲临现场,就能在几秒钟内对事件做出响应。
数据还会输入到一个数字孪生模型中:一个显示实时交通状况、车辆详情和新兴拥堵情况的实时 3D 虚拟高速公路模型。交通警察通过监控此视觉界面来管理车流、发布智能警报并快速准确地应对突发事件。
Link to this section计算机视觉支持的自动移动导航#
如今的导航远不止是从 A 点到 B 点。它现在是智能系统的重要组成部分,用于移动人员、管理货物并做出实时决策——无论是在路上还是在 仓库 内部。
计算机视觉是其中许多系统的核心,它使机器能够解释视觉数据并即时响应周围环境。让我们通过一些例子来看看这项技术如何改变不同环境下的导航方式。
Link to this section利用计算机视觉导航的仓库机器人#
机器人 正在成为物流未来的关键,尤其是在大规模仓库运营中。随着电子商务需求的增长,公司越来越依赖计算机视觉驱动的机器来在复杂环境中导航、分拣物品并以高速度和高精度管理库存。
以 Amazon 的履约中心 为例,那里有超过 750,000 台机器人与人类协同工作,以保持高效运营。这些机器人非常依赖计算机视觉来在繁忙的仓库地面上导航、识别物品并做出快速、准确的决策。
Sequoia 就是这样一个旨在加快库存处理速度的机器人平台。它使用先进的计算机视觉来扫描、计数和组织入库产品,有助于简化存储和检索流程。
同样,Vulcan 是一款机器人手臂,它利用摄像头和图像分析从货架上安全地拾取物品,根据每个物体的形状和位置调整抓取方式,甚至能识别何时需要人类协助。与此同时,另一个配备视觉系统的机器人 Cardinal 专注于分拣:它扫描混合的包裹堆,并将它们精准地放入正确的出站货车中。

图 4。Cardinal 从堆中精准地拾起包裹。
Link to this section自动驾驶汽车导航中的计算机视觉#
到目前为止,我们已经看到了计算机视觉如何帮助人类和机器人导航它们的环境。但它对于 自动驾驶汽车 等自动系统同样至关重要,在这些系统中,导航完全取决于车辆能实时看到和理解的内容。
一个很好的例子是 Tesla Vision 系统。Tesla 采用了仅依靠摄像头的自动驾驶方法,去除了雷达和其他传感器,转而使用一组提供车辆周围 360 度全景视图的摄像头网络。这些摄像头将视觉数据传输到全自动驾驶 (FSD) 计算机,该计算机使用深度神经网络来解释环境并做出瞬间的驾驶决策。
根据它所看到的内容,系统决定何时转向、加速、刹车或变道——就像人类驾驶员一样,但完全是通过视觉输入。Tesla 通过收集并学习其车队中海量的真实驾驶数据,不断改进该系统。

图 5。Tesla 使用计算机视觉进行安全和自动化的导航(来源:Tesla)。
Link to this section导航中计算机视觉的优缺点#
以下是在导航中使用计算机视觉的一些主要优势,特别是在准确性、安全性和实时决策至关重要的系统中:
- 降低燃料消耗: 通过帮助驾驶员避开交通拥堵和走走停停的路线,计算机视觉可以减少整体燃料消耗和旅行时间,从而使日常通勤更高效。
- 检测道路磨损和基础设施问题: 基于视觉的解决方案 可以扫描坑洼、褪色的车道标线、破损的标志和损坏的基础设施,为维护团队提供可靠的实时数据。
- 与其他 AI 工具无缝集成: 计算机视觉可以与语音助手、行为预测模型或路线优化算法相结合,创造出高度智能和个性化的导航体验。
虽然计算机视觉为导航带来了许多好处,但在实施此类解决方案时,也有一些重要的局限性需要考虑。以下是一些需要牢记的主要挑战:
- 缺乏泛化能力: 在特定环境或场景中训练的模型,如果不经过重新训练,在部署到新的或不断变化的环境中时往往会遇到困难。
- 光照局限性: 视觉系统依赖于良好的光照和清晰的天气才能良好工作。在大雾、大雨或黑暗中,除非结合 LiDAR 或雷达等传感器,否则它们的性能会下降。
- 隐私风险:使用摄像头的导航系统可能在未经同意的情况下捕获人员和私人财产。这引发了在开发和部署过程中必须仔细解决的隐私问题。
Link to this section关键要点#
计算机视觉通过使地图更具动态性、交通系统更智能以及移动更便捷,正在重塑导航。曾经静态的路线现在变成了实时的交互式体验——得益于沉浸式 3D 预览、AR 引导方向和自动运输技术。
随着技术的发展,重点很可能会转向使这些系统更具包容性、适应性和责任感。持续的进步将取决于提高在不同环境下的准确性、保持可靠的性能以及保护用户隐私。计算机视觉在导航中的未来在于构建不仅智能,而且在设计和影响上都体贴周到的解决方案。
加入我们不断壮大的 社区!探索我们的 GitHub 存储库 以了解 AI,并查看我们的 许可选项 以启动你的视觉 AI 项目。对 零售 AI 和 农业计算机视觉 等创新感兴趣吗?访问我们的解决方案页面以了解更多!






