2025 年最佳对象检测模型
探索 2026 年最佳目标检测模型,了解热门架构、性能权衡以及实际部署因素。
今年早些时候,AI 和机器学习领域的先驱 Andrew Ng 引入了代理目标检测的概念。这种方法使用推理代理根据文本提示来检测目标,而无需海量的训练数据。
能够在无需大型标注数据集的情况下识别图像和视频中的目标,是迈向更智能、更灵活 computer vision 系统的一步。然而,代理视觉 AI 仍处于早期阶段。
虽然它可以处理通用任务(例如检测图像中的行人或交通标志),但更精确的计算机视觉应用仍然依赖于传统的目标检测模型。这些模型是在大型、仔细标注的数据集上进行训练的,以确切了解要查找的内容及目标的位置。
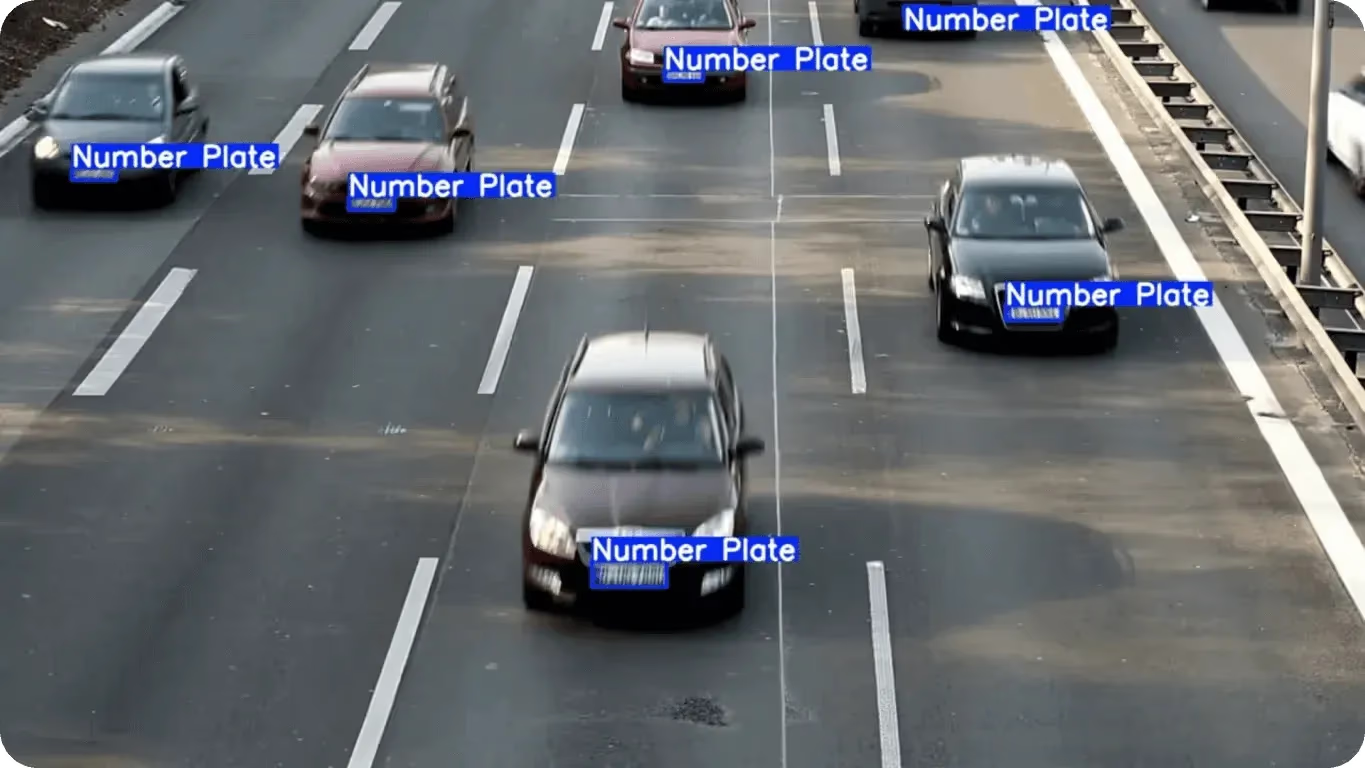
图 1. 目标检测示例。(来源)
传统 object detection 之所以必不可少,是因为它同时提供了识别(确定目标是什么)和定位(确定目标在图像中的准确位置)功能。这种结合使机器能够可靠地执行复杂的现实世界任务,从自动驾驶汽车到工业自动化和医疗诊断。
得益于技术进步,目标检测模型在不断改进,变得更快、更准确,并且更适合现实环境。在本文中,我们将介绍当今一些最好的目标检测模型。让我们开始吧!
Link to this section目标检测的需求#
Computer vision tasks(如图像分类)可用于判断图像是否包含汽车、人或其他物体。但是,它们无法确定目标在图像中的位置。
这就是目标检测发挥作用的地方。目标检测模型不仅能识别存在哪些目标,还能精确定位它们的位置。这个过程被称为定位,它使机器能够更准确地理解场景并做出适当反应,无论是让自动驾驶汽车停下、引导机械臂,还是高亮显示医学影像中的某个区域。
深度学习的兴起改变了目标检测。现代模型不再依赖人工编写的规则,而是直接从标注和视觉数据中学习模式。这些数据集教会模型目标的样子、它们通常出现在哪里,以及如何处理诸如小目标、杂乱场景或不同光照条件等挑战。
事实上,最先进的目标检测系统可以同时准确检测多个目标。这使得目标检测成为自动驾驶、机器人、医疗保健和工业自动化等应用中的关键技术。
Link to this section目标检测任务的工作原理#
目标检测模型的输入是图像,它可能来自摄像头、视频帧,甚至是医学扫描。输入图像通过神经网络(通常是卷积神经网络,即 CNN)进行处理,该网络经过训练可识别视觉数据中的模式。
在网络内部,图像会分阶段进行分析。根据检测到的特征,模型会预测存在哪些目标以及它们出现在哪里。
这些预测使用 bbox 表示,即围绕每个检测到的目标绘制的矩形。对于每个 bbox,模型都会分配一个类标签(例如汽车、人或狗)以及一个置信度分数,表明其对预测的确定程度(这也可被视为概率)。
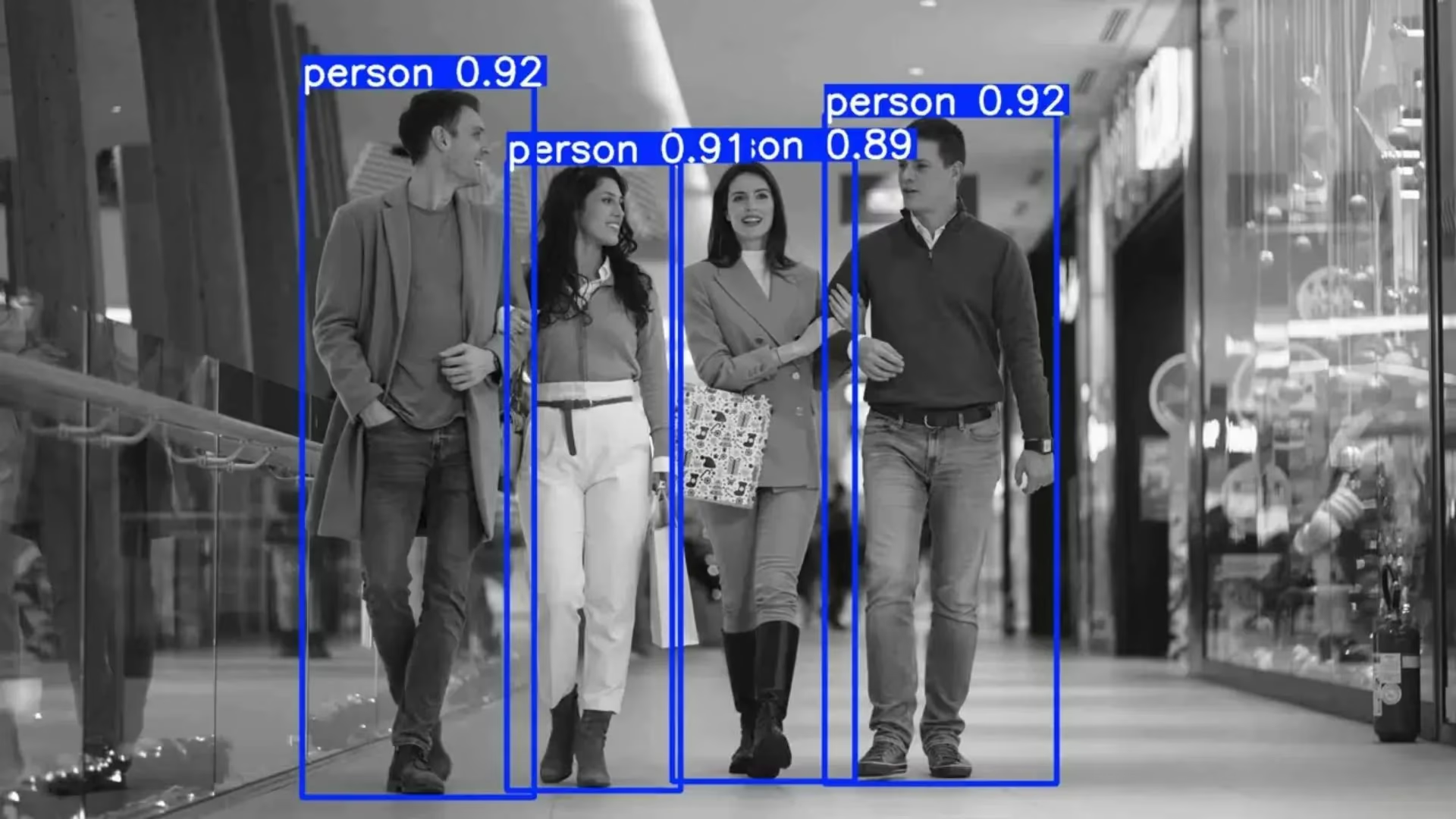
图 2. 目标检测预测可以使用 bbox 可视化。
整个过程在很大程度上依赖于特征提取。模型学习识别有用的视觉模式,例如边缘、形状、纹理和其他显著特征。这些模式被编码在特征图中,有助于网络在多个细节层级上理解图像。
Link to this section检测目标:两阶段与单阶段#
根据模型架构的不同,目标检测器使用不同的策略来定位目标,从而在速度、准确性和复杂性之间取得平衡。
许多目标检测模型,特别是像 Faster R-CNN 这样的两阶段检测器,专注于图像中称为感兴趣区域 (ROI) 的特定部分。通过专注于这些区域,模型会优先处理更有可能包含目标的区域,而不是平等地分析每个像素。
另一方面,像早期 YOLO 模型这样的单阶段模型不像两阶段模型那样选择特定的 ROI。相反,它们将图像划分为网格,并使用预定义的框(称为 anchor boxes)以及特征图来一次性预测整个图像中的目标。
如今,尖端的目标检测模型正在探索无锚(anchor-free)方法。与依赖预定义 anchor boxes 的传统单阶段模型不同,无锚模型直接从特征图预测目标位置和大小。这可以简化架构、减少计算开销并提高性能,特别是在检测不同形状和大小的目标时。
Link to this section一览最佳目标检测模型#
今天,有许多目标检测模型,每个模型的设计都有特定的目标。有些针对实时性能进行了优化,而另一些则专注于实现最高准确度。为计算机视觉解决方案选择合适的模型通常取决于你的具体用例和性能要求。
接下来,让我们一起探索 2026 年一些最出色的目标检测模型。
Link to this sectionUltralytics YOLO 模型#
当今使用最广泛的目标检测模型系列之一是 Ultralytics YOLO 模型系列。YOLO(代表 You Only Look Once)在各行各业都很受欢迎,因为它提供了强大的检测性能,同时速度快、可靠且易于使用。
Ultralytics YOLO 系列包括 Ultralytics YOLOv5、Ultralytics YOLOv8、Ultralytics YOLO11 以及即将推出的 Ultralytics YOLO26,为不同的性能和用例需求提供了一系列选择。得益于其轻量级设计和速度优化,Ultralytics YOLO 模型非常适合实时检测,并可部署在计算能力和内存有限的边缘设备上。
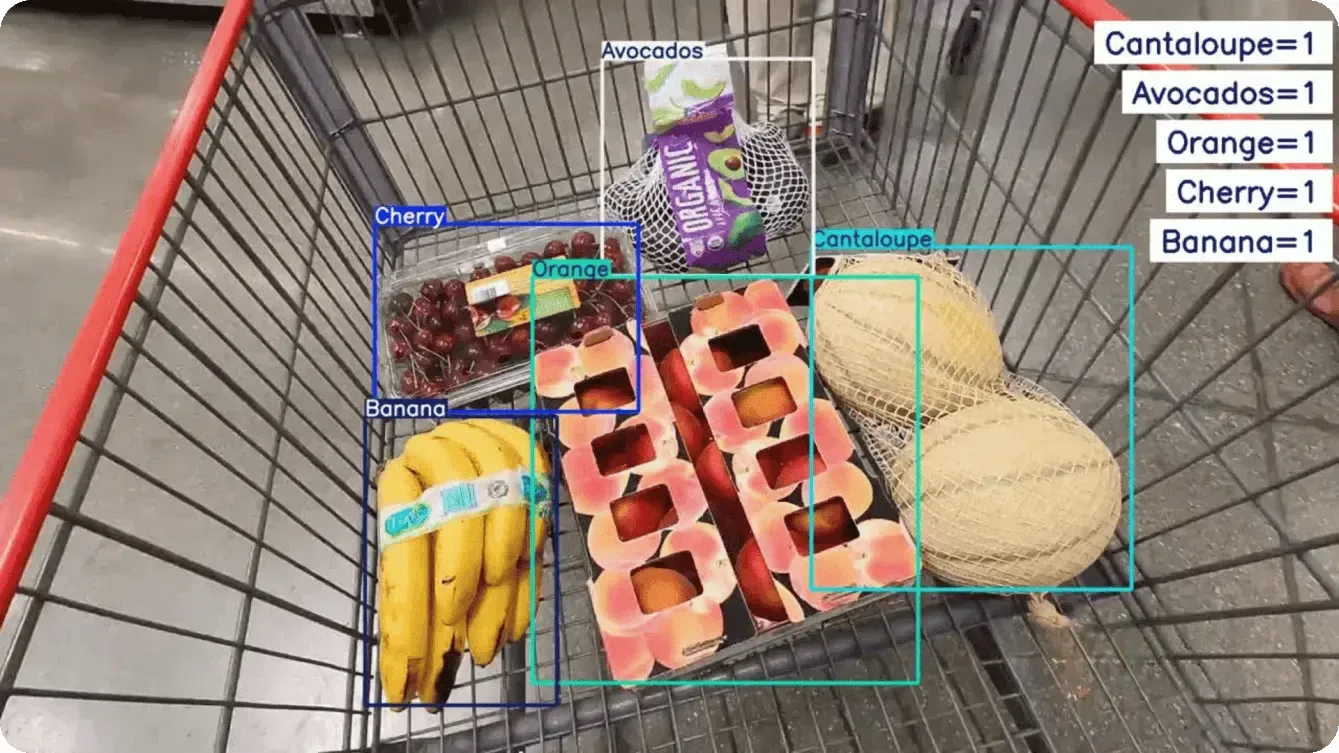
图 3. 使用 Ultralytics YOLO11 进行目标检测 (来源)
除了基础的目标检测,这些模型还具有高度的多功能性。它们还支持诸如实例分割(在像素级勾勒目标轮廓)和姿态估计(识别人物或目标上的关键点)等任务。这种灵活性使 Ultralytics YOLO 模型成为从农业、物流到零售和制造业等广泛应用的首选方案。
Ultralytics YOLO 模型受欢迎的另一个关键原因是 Ultralytics Python package,它为训练、微调和部署模型提供了一个简单且用户友好的界面。开发者可以使用预训练权重开始,为自己的数据集自定义模型,并仅需几行代码即可完成部署。
Link to this sectionRT-DETR 和 RT-DETRv2#
RT-DETR (Real-Time Detection Transformer) 和较新的 RT-DETRv2 是为实时使用而构建的目标检测模型。与许多传统模型不同,它们可以在不使用非极大值抑制 (NMS) 的情况下接收图像并直接给出最终检测结果。
NMS 是当模型多次预测同一个目标时删除多余重叠框的步骤。跳过 NMS 会使检测过程更简单、更快速。
这些模型将 CNN 与 Transformer 相结合。CNN 负责发现诸如边缘和形状之类的视觉细节,而 Transformer 是一种神经网络,可以同时查看整幅图像并理解不同部分之间的关系。这种全面的理解使模型能够检测靠得太近或重叠的目标。
RT-DETRv2 在原始模型的基础上进行了改进,增加了多尺度检测等功能,有助于查找小目标和大目标,并能更好地处理复杂场景。这些更改在提高准确性的同时保持了模型的速度。
Link to this sectionRF-DETR#
RF-DETR 是一款基于 Transformer 的实时模型,旨在将 Transformer 架构的准确性与现实应用所需的速度结合起来。与 RT-DETR 和 RT-DETRv2 一样,它使用 Transformer 分析整幅图像,并使用 CNN 提取边缘、形状和纹理等细微视觉特征。
该模型直接根据输入图像预测目标,跳过了 anchor boxes 和非极大值抑制,从而简化了检测过程并保持了快速推理。RF-DETR 还支持实例分割,使其除了能预测 bbox 外,还能在像素级别勾勒出目标的轮廓。
Link to this sectionEfficientDet#
EfficientDet 发布于 2019 年末,是一款专为高效缩放和高性能而设计的目标检测模型。EfficientDet 的独特之处在于复合缩放(compound scaling),这是一种同时缩放输入分辨率、网络深度和网络宽度的方法,而不是仅调整一个因素。这种方法有助于模型无论是在扩展以执行高性能任务,还是缩小以进行轻量级部署时,都能保持稳定的准确性。
EfficientDet 的另一个关键组件是其高效特征金字塔网络 (FPN),它允许模型在多个尺度上分析图像。这种多尺度分析对于检测不同大小的目标至关重要,使 EfficientDet 能够可靠地识别同一图像中的小目标和大目标。
Link to this sectionPP-YOLOE+#
PP-YOLOE+ 发布于 2022 年,是一款 YOLO 风格的目标检测模型,意味着它通过对图像进行单次传递来检测和分类目标。这种方法使其快速且适用于实时应用,同时仍能保持高准确性。
PP-YOLOE+ 的关键改进之一是任务对齐学习(task-aligned learning),这有助于模型的置信度分数更准确地反映目标定位的准确程度。这对于检测小目标或重叠目标特别有用。
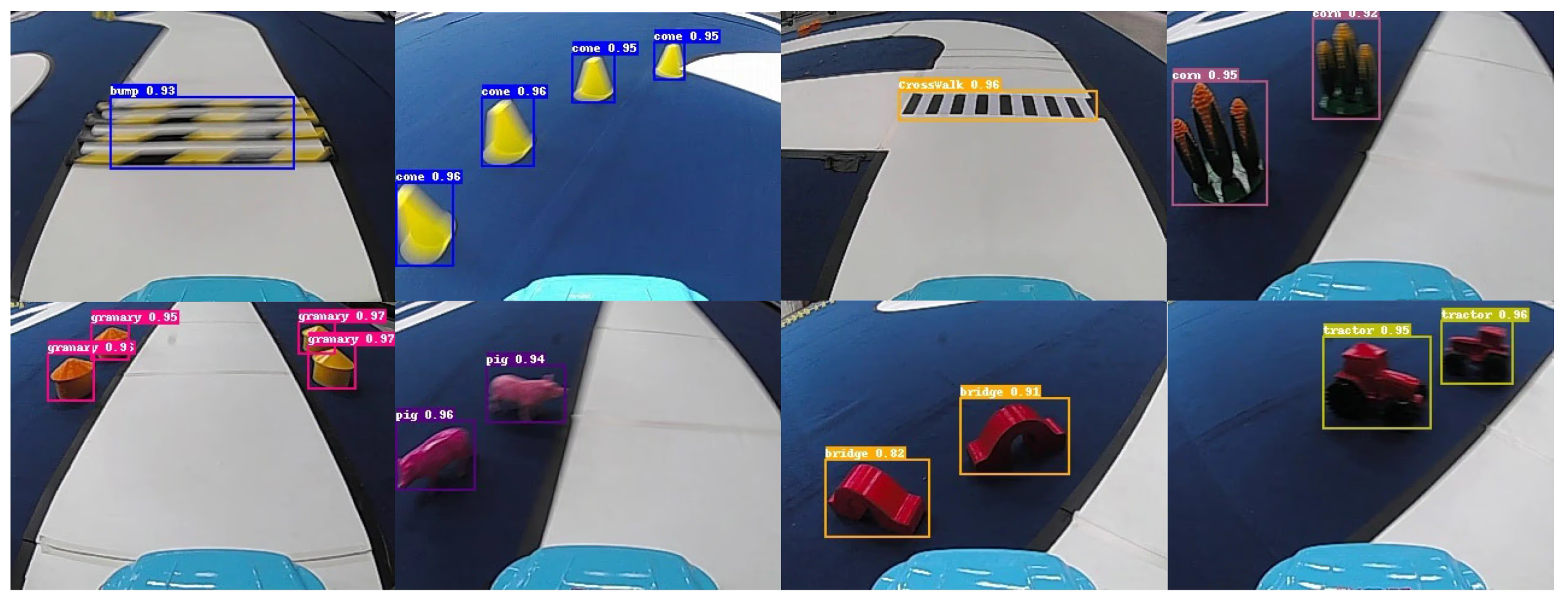
图 4. 使用 PP-YOLOE+ 检测目标 (来源)
该模型还使用了去耦头(decoupled head)架构,将预测目标位置和类标签的任务分离开来。这使其能够在正确分类目标的同时,更精确地绘制 bbox。
Link to this sectionGroundingDINO#
GroundingDINO 是一款结合了视觉和语言的基于 Transformer 的目标检测模型。它无需依赖固定的类别集,而是允许用户使用自然语言文本提示来检测目标。
通过将图像中的视觉特征与文本描述对齐,即使训练数据中没有这些确切的标签,模型也能定位目标。这意味着你可以用诸如“戴头盔的人”或“建筑物附近的红色汽车”之类的描述来提示模型,它会围绕匹配的目标生成准确的 bbox。
此外,通过支持零样本(zero-shot)检测,GroundingDINO 减少了为每个新用例重新训练或微调模型的需求,使其在广泛的应用中具有高度灵活性。这种语言理解与视觉识别的结合,为交互式和自适应 AI 系统开启了新的可能性。
Link to this section用于评估目标检测器的常用指标#
当你比较各种目标检测模型时,你可能想知道如何判断哪个模型表现最好。这是一个很好的问题,因为除了模型架构和数据质量之外,许多因素都会影响性能。
研究人员通常依靠共享基准和标准性能指标来持续评估模型、比较结果并理解速度与准确性之间的权衡。标准基准尤为重要,因为许多目标检测模型都是在相同的数据集(例如 COCO 数据集)上进行评估的。
Link to this section衡量检测准确度和速度#
以下是用于评估目标检测模型的一些常用指标的详细介绍:
- Intersection over union (IoU): 此指标衡量预测的 bbox 与图像中实际目标重叠的程度。它将模型绘制的框与真值框(即数据集中标注的目标位置)进行比较。IoU 的计算方式为重叠区域除以两个框的并集区域。IoU 越高,表明模型放置框的位置越准确,而 IoU 越低,则意味着预测精度越低。简单来说,IoU 显示了模型的预测与真实目标位置的匹配程度。
- Mean average precision (mAP):这是用于评估整体目标检测性能的主要指标。它考虑了模型正确检测到的目标数量,以及这些检测在不同置信度水平和目标类别下的准确性。
- Frames per second (FPS) 和延迟:FPS 显示模型在一秒钟内可以处理多少图像或视频帧。例如,以 30 FPS 运行的模型每秒可以处理 30 帧。更高的 FPS 意味着系统可以更快地做出响应,这对于实时视频、交通监控或机器人等用例非常重要。另一方面,延迟衡量的是模型从接收到图像或帧到结果准备好所需的时间。
Link to this section使用目标检测算法的优缺点#
以下是在现实应用中使用目标检测模型的一些主要优势:
- 跨行业扩展: 目标检测可应用于广泛的用例,从交通监控和零售分析到医疗保健、农业和制造业。
- 减少体力劳动: 自动化视觉检查和监控任务降低了对持续人工监督的需求,并帮助团队专注于更有价值的工作。
- 受益于开源生态系统: 活跃的开源社区和 GitHub 上的资源使得访问预训练模型、进行实验和定制解决方案变得更加容易。
尽管有这些优点,但也存在可能影响目标检测模型性能的实际限制。以下是一些需要考虑的重要因素:
- 高质量数据要求: 目标检测模型依赖于大型、标注良好的数据集进行训练。创建和维护这些数据可能既耗时、昂贵,又难以扩展。
- 计算需求: 提供更高检测准确度的模型通常需要大量的计算能力,无论是在训练期间还是在实时部署期间。这通常意味着使用高性能 GPU,这可能会增加基础设施成本。
- 对现实条件的敏感性: 光照、摄像机角度、天气和拥挤场景的变化会影响检测性能,因此需要进行持续的测试和调整。
Link to this section关键要点#
适合你计算机视觉项目的最佳目标检测模型取决于你的用例、数据设置、性能要求和硬件限制。有些模型针对速度进行了优化,有些则专注于准确性,大多数现实应用需要两者之间的平衡。得益于开源框架和 GitHub 上活跃的社区,这些模型现在越来越容易评估、调整并部署到实际使用中。
欲了解更多信息,请浏览我们的 GitHub repository。加入我们的 community,并查看我们的解决方案页面,阅读有关 AI in healthcare 和 computer vision in the automotive 行业应用的内容。立即探索我们的 licensing options 以开始使用视觉 AI。






