فوائد كون Ultralytics YOLO11 كاشفاً بدون مرساة
افهم كيف يدعم Ultralytics YOLO11 اكتشاف الكائنات بدون مرساة (anchor-free) والفوائد التي تجلبها معمارية النموذج هذه لمختلف التطبيقات.

إذا ألقينا نظرة على تاريخ نماذج رؤية الذكاء الاصطناعي، سنجد أن مفهوم كشف الأشياء - وهي مهمة أساسية في رؤية الحاسوب تتضمن تحديد الأشياء ومواقعها داخل صورة أو مقطع فيديو - موجود منذ ستينيات القرن العشرين. ومع ذلك، فإن السبب الرئيسي لأهميته في الابتكارات المتطورة اليوم هو أن تقنيات كشف الأشياء وهياكل النماذج قد تقدمت وتحسنت بسرعة منذ ذلك الحين.
في مقالة سابقة، ناقشنا تطور كشف الأشياء والطريق الذي قاد إلى نماذج Ultralytics YOLO. اليوم، سنركز على استكشاف علامة فارقة أكثر تحديداً في هذه الرحلة: الانتقال من الكواشف المعتمدة على الرواسي إلى الكواشف الخالية من الرواسي.
تعتمد الكواشف القائمة على الرواسي على صناديق محددة مسبقاً، تسمى "الرواسي" (anchors)، للتنبؤ بمواقع الأشياء في الصورة. في المقابل، تتخطى الكواشف الخالية من الرواسي هذه الصناديق المحددة مسبقاً وتتنبأ بمواقع الأشياء مباشرة.
على الرغم من أن هذا التحول قد يبدو تغييراً منطقياً وبسيطاً، إلا أنه أدى في الواقع إلى تحسينات كبيرة في دقة وكفاءة كشف الأشياء. في هذه المقالة، سنتعرف على كيفية إعادة تشكيل الكواشف الخالية من الرواسي لرؤية الحاسوب من خلال تطورات مثل Ultralytics YOLO11.
Link to this sectionما هي الكواشف القائمة على الرواسي؟#
الكواشف القائمة على الرواسي تستخدم صناديق محددة مسبقاً، تُعرف بالرواسي، للمساعدة في تحديد مواقع الأشياء في الصورة. فكّر في هذه الرواسي كشبكة من الصناديق ذات أحجام وأشكال مختلفة موضوعة فوق الصورة. يقوم النموذج بعد ذلك بضبط هذه الصناديق لتناسب الأشياء التي يكتشفها. على سبيل المثال، إذا حدد النموذج سيارة، فسيقوم بتعديل صندوق الرواسي ليتطابق مع موقع وحجم السيارة بدقة أكبر.
ترتبط كل رواسي بشيء محتمل في الصورة، وأثناء التدريب، يتعلم النموذج كيفية تعديل صناديق الرواسي لتتوافق بشكل أفضل مع موقع الشيء وحجمه ونسبة أبعاده. يسمح هذا للنموذج بكشف الأشياء بمقاييس واتجاهات مختلفة. ومع ذلك، يمكن أن يكون اختيار المجموعة الصحيحة من صناديق الرواسي مستهلكاً للوقت، كما أن عملية ضبطها بدقة قد تكون عرضة للأخطاء.
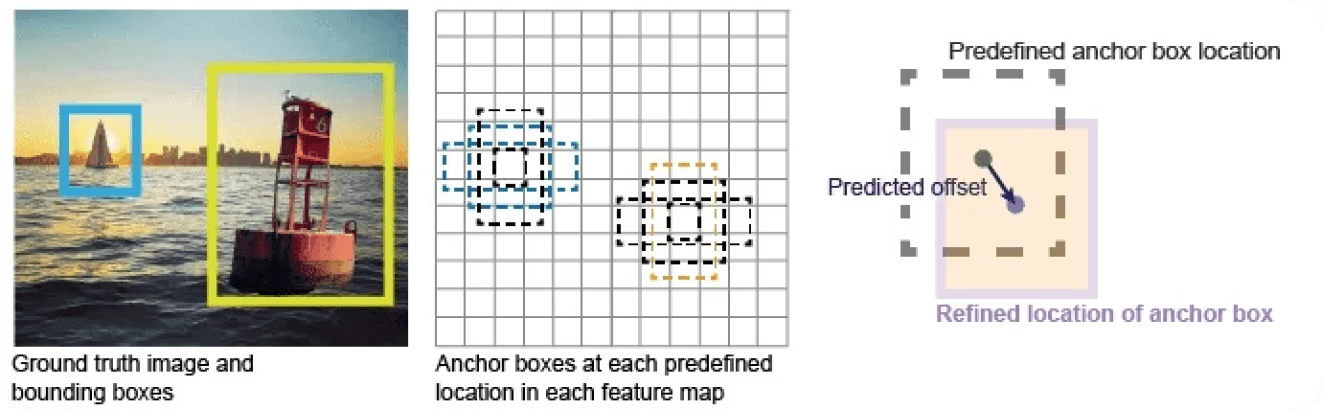
الشكل 1. ما هو صندوق الرواسي (Anchor Box)؟
على الرغم من أن الكواشف القائمة على الرواسي، مثل YOLOv4، عملت بشكل جيد في العديد من التطبيقات، إلا أن لها بعض العيوب. على سبيل المثال، لا تتوافق صناديق الرواسي دائماً بشكل جيد مع الأشياء ذات الأشكال أو الأحجام المختلفة، مما يجعل من الصعب على النموذج اكتشاف الأشياء الصغيرة أو ذات الأشكال غير المنتظمة. كما يمكن أن تكون عملية اختيار وضبط أحجام صناديق الرواسي مستهلكة للوقت وتتطلب الكثير من الجهد اليدوي. بالإضافة إلى ذلك، غالباً ما تعاني النماذج القائمة على الرواسي من صعوبة في كشف الأشياء المحجوبة أو المتداخلة، حيث قد لا تتكيف الصناديق المحددة مسبقاً بشكل جيد مع هذه السيناريوهات الأكثر تعقيداً.
Link to this sectionالتحول نحو كشف الأشياء الخالي من الرواسي#
بدأت الكواشف الخالية من الرواسي في جذب الانتباه في عام 2018 مع نماذج مثل CornerNet و CenterNet، والتي اتبعت نهجاً جديداً في كشف الأشياء من خلال القضاء على الحاجة إلى صناديق رواسي محددة مسبقاً. بخلاف النماذج التقليدية التي تعتمد على صناديق رواسي بأحجام وأشكال مختلفة للتنبؤ بمواقع الأشياء، تتنبأ النماذج الخالية من الرواسي بمواقع الأشياء مباشرة. وهي تركز على النقاط الرئيسية أو ميزات الشيء، مثل المركز، مما يبسط عملية الكشف ويجعلها أسرع وأكثر دقة.
إليك كيف تعمل النماذج الخالية من الرواسي بشكل عام:
- كشف النقاط الرئيسية: بدلاً من استخدام صناديق محددة مسبقاً، تحدد بعض النماذج نقاطاً مهمة على الشيء، مثل المركز أو زوايا محددة. تساعد هذه النقاط الرئيسية النماذج في معرفة مكان الشيء ومدى حجمه.
- التنبؤ بـالمركز prediction: تركز بعض النماذج على التنبؤ بمركز الشيء. بمجرد تحديد المركز، يمكن للنموذج التنبؤ بحجم وموقع الشيء بالكامل انطلاقاً منه.
- انحدار الخريطة الحرارية (Heatmap regression): تستخدم العديد من النماذج الخالية من الرواسي خرائط حرارية، حيث يمثل كل بكسل موقعاً محتملاً لشيء ما. تشير قيم الخريطة الحرارية الأقوى إلى ثقة أعلى في وجود شيء عند تلك النقطة.
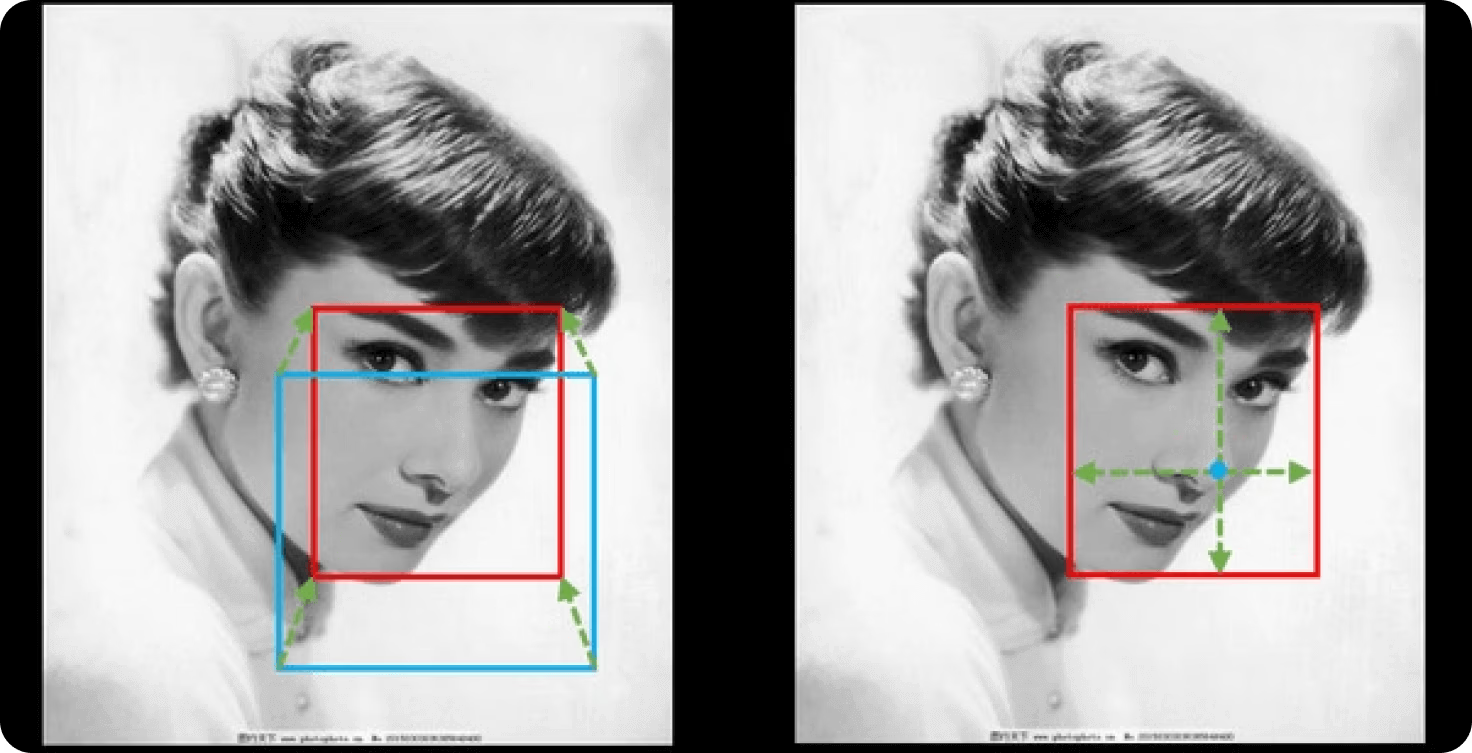
الشكل 2. الكشف المعتمد على الرواسي مقابل الكشف الخالي من الرواسي.
بما أن النماذج الخالية من الرواسي لا تعتمد على صناديق الرواسي، فهي تتمتع بتصميم أبسط. وهذا يعني أنها أكثر كفاءة من الناحية الحسابية. ولأنها لا تضطر إلى معالجة صناديق رواسي متعددة، يمكنها كشف الأشياء بسرعة أكبر - وهي ميزة مهمة في التطبيقات اللحظية مثل القيادة الذاتية والمراقبة بالفيديو.
تعد النماذج الخالية من صناديق الربط (anchor-free) أيضًا أفضل بكثير في التعامل مع الكائنات الصغيرة أو غير المنتظمة أو المحجوبة. ونظرًا لأنها تركز على اكتشاف النقاط الرئيسية بدلاً من محاولة مطابقة صناديق الربط، فهي أكثر مرونة بكثير. وهذا يتيح لها اكتشاف الكائنات بدقة في البيئات المزدحمة أو المعقدة التي قد تفشل فيها النماذج المعتمدة على صناديق الربط.
Link to this sectionUltralytics YOLO11: كاشف خالٍ من الرواسي#
صُممت نماذج YOLO في الأصل للسرعة والكفاءة، وقد تحولت تدريجياً من الطرق المعتمدة على الرواسي إلى الكشف الخالي من الرواسي، مما جعل نماذج مثل YOLO11 أسرع وأكثر مرونة وأنسب لمجموعة واسعة من التطبيقات اللحظية.
إليك نظرة سريعة على كيفية تطور التصميم الخالي من الرواسي عبر إصدارات YOLO المختلفة:
- Ultralytics YOLOv5u: قدمت رأس Ultralytics المقسم الخالي من الرواسي (Anchor-Free Split Ultralytics Head)، مما ألغى الحاجة إلى صناديق رواسي محددة مسبقاً. بدلاً من ذلك، يتنبأ النموذج مباشرة بمواقع الأشياء في الصورة، مما يبسط العملية ويحسن المرونة والسرعة.
- YOLOv6: تم استخدام طريقة جديدة تسمى التدريب المساعد بالرواسي (AAT - Anchor-Aided Training)، حيث استُخدمت الرواسي فقط أثناء التدريب. سمح هذا للنموذج بالاستفادة من هيكل الطرق المعتمدة على الرواسي أثناء التدريب، مع الاستمرار في استخدام الكشف الخالي من الرواسي أثناء التشغيل لسرعة وقابلية تكيف أفضل.
- Ultralytics YOLOv8: تحول بالكامل إلى الكشف الخالي من الرواسي باستخدام رأس Ultralytics المقسم الخالي من الرواسي. جعل هذا النموذج أسرع وأكثر دقة، خاصة بالنسبة للأشياء الصغيرة أو ذات الأشكال الغريبة التي لا تتناسب جيداً مع صناديق الرواسي.
- Ultralytics YOLO11: يعتمد على نهج YOLOv8 الخالي من صناديق الربط، مما يزيد من تحسين الاكتشاف بشكل أكبر من خلال القضاء على صناديق الربط تمامًا. ويؤدي هذا إلى اكتشاف أسرع وأكثر دقة للتطبيقات في الوقت الفعلي مثل مراقبة سلوك الحيوان وتحليلات التجزئة.
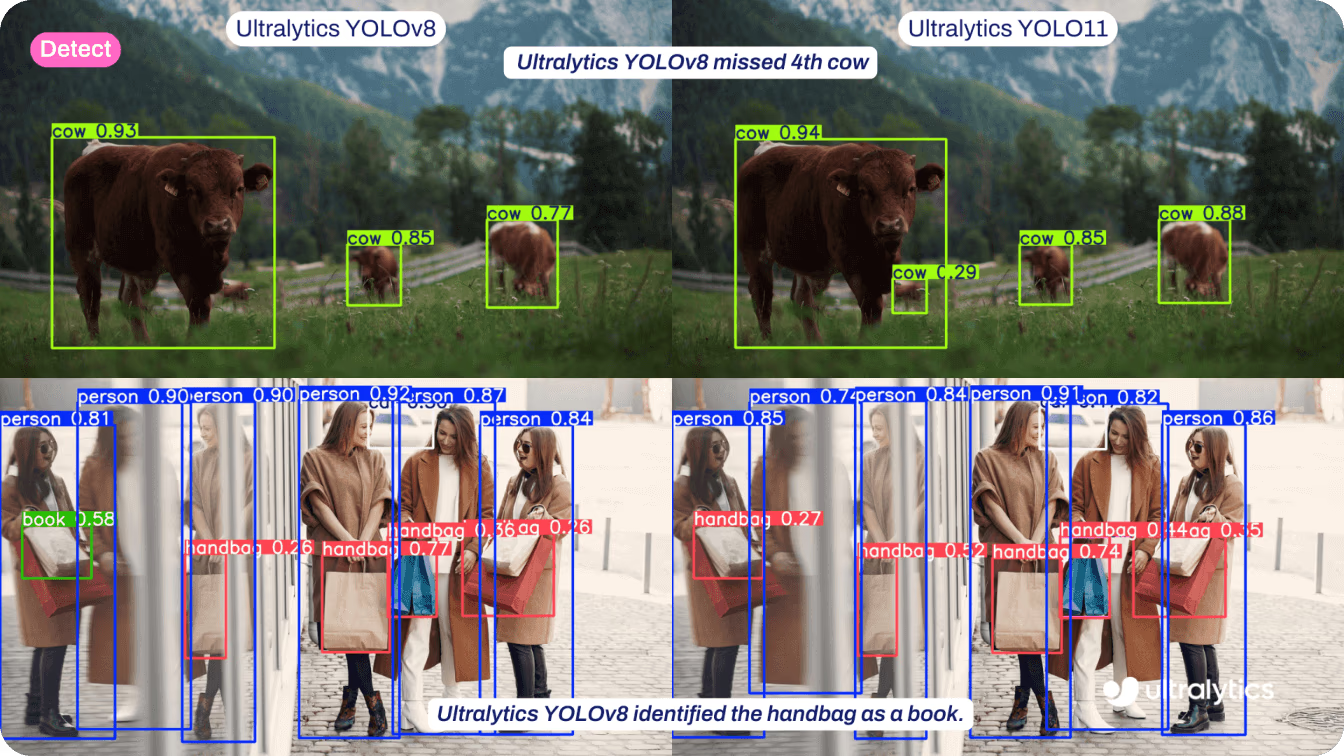
الشكل 3. مقارنة بين Ultralytics YOLOv8 و Ultralytics YOLO11.
Link to this sectionتطبيقات YOLO11 في العالم الحقيقي#
يعد المركبات ذاتية القيادة مثالاً رائعًا على فوائد الاكتشاف الخالي من صناديق الربط باستخدام YOLO11. ففي السيارات ذاتية القيادة، يعد اكتشاف المشاة والمركبات الأخرى والعوائق بسرعة ودقة أمرًا بالغ الأهمية للسلامة. يعمل نهج YOLO11 الخالي من صناديق الربط على تبسيط عملية الاكتشاف من خلال التنبؤ المباشر بالنقاط الرئيسية للكائنات، مثل مركز المشاة أو حدود مركبة أخرى، بدلاً من الاعتماد على صناديق ربط محددة مسبقًا.

الشكل 4. فوائد الكشف الخالي من الرواسي في YOLO11 (الصورة بواسطة المؤلف).
لا يحتاج YOLO11 إلى ضبط أو ملاءمة شبكة من الرواسي لكل شيء، وهو أمر قد يكون مكلفاً حسابياً وبطيئاً. بدلاً من ذلك، فإنه يركز على الميزات الرئيسية، مما يجعله أسرع وأكثر كفاءة. على سبيل المثال، عندما يدخل أحد المشاة في مسار السيارة، يمكن لـ YOLO11 تحديد موقعه بسرعة من خلال تحديد النقاط الرئيسية، حتى لو كان الشخص محجوباً جزئياً أو متحركاً. إن القدرة على التكيف مع الأشكال والأحجام المتغيرة بدون صناديق الرواسي تسمح لـ YOLO11 بكشف الأشياء بشكل أكثر موثوقية وبسرعات أعلى، وهو أمر حيوي لاتخاذ القرار اللحظي في أنظمة القيادة الذاتية.
التطبيقات الأخرى التي تبرز فيها قدرات YOLO11 الخالية من الرواسي تشمل:
- تجزئة التجزئة وإدارة المخزون: يجعل YOLO11 مراقبة المنتجات على الأرفف أسهل، حتى عندما تكون مكدسة أو محجوبة جزئياً. وهذا يساعد في تتبع المخزون بشكل أسرع وأكثر دقة ويقلل من الأخطاء.
- التصوير الطبي: فعال أيضاً في الرعاية الصحية، حيث يمكنه اكتشاف الأورام أو التشوهات الأخرى في الفحوصات الطبية. تساعد قدرته على العمل مع الأشياء ذات الأشكال غير المنتظمة في تحسين الدقة في تشخيص الحالات المعقدة.
- مراقبة الحياة البرية: في أبحاث الحياة البرية، يمكن لـ YOLO11 تتبع الحيوانات في الغابات الكثيفة أو التضاريس الصعبة، مما يساعد الباحثين على مراقبة السلوك أو حماية الأنواع المهددة بالانقراض.
- تحليلات الرياضة: يمكن استخدام YOLO11 لتتبع اللاعبين، أو حركات الكرة، أو العناصر الأخرى لحظياً أثناء الأحداث الرياضية لتوفير رؤى قيمة للفرق والمدربين والمذيعين.
Link to this sectionاعتبارات يجب مراعاتها عند العمل مع النماذج الخالية من الرواسي#
على الرغم من أن النماذج الخالية من الرواسي مثل YOLO11 تقدم العديد من المزايا، إلا أنها تأتي مع قيود معينة. أحد الاعتبارات العملية الرئيسية هو أن النماذج الخالية من الرواسي قد تعاني أيضاً من الانسدادات أو الأشياء المتداخلة بشكل كبير. المنطق وراء ذلك هو أن رؤية الحاسوب تهدف إلى محاكاة الرؤية البشرية، وكما أننا نكافح أحياناً لتحديد الأشياء المحجوبة، يمكن أن تواجه نماذج الذكاء الاصطناعي تحديات مماثلة.
عامل آخر مثير للاهتمام يتعلق بمعالجة تنبؤات النموذج. على الرغم من أن بنية النماذج الخالية من الرواسي أبسط من تلك المعتمدة على الرواسي، إلا أن تحسيناً إضافياً يصبح ضرورياً في حالات معينة. على سبيل المثال، قد تكون تقنيات ما بعد المعالجة مثل قمع غير الحد الأقصى (NMS) مطلوبة لتنظيف التنبؤات المتداخلة أو تحسين الدقة في المشاهد المزدحمة.
Link to this sectionترسيخ مستقبل الذكاء الاصطناعي مع YOLO11#
كان الانتقال من الكشف المعتمد على الرواسي إلى الكشف الخالي من الرواسي تقدماً كبيراً في كشف الأشياء. مع النماذج الخالية من الرواسي مثل YOLO11، أصبحت العملية مبسطة، مما أدى إلى تحسينات في كل من الدقة والسرعة.
من خلال YOLO11، رأينا كيف يتفوق كشف الأشياء الخالي من الرواسي في التطبيقات اللحظية مثل السيارات ذاتية القيادة، والمراقبة بالفيديو، والتصوير الطبي، حيث يكون الكشف السريع والدقيق أمراً حاسماً. يمكّن هذا النهج YOLO11 من التكيف بسهولة أكبر مع أحجام الأشياء المتغيرة والمشاهد المعقدة، مما يوفر أداءً أفضل عبر بيئات متنوعة.
مع استمرار تطور رؤية الحاسوب، سيصبح كشف الأشياء أسرع وأكثر مرونة وأكثر كفاءة.
استكشف مستودع GitHub الخاص بنا وانضم إلى مجتمعنا التفاعلي لتبقى على اطلاع دائم بكل ما يخص الذكاء الاصطناعي. تحقق من كيفية تأثير رؤية الذكاء الاصطناعي على قطاعات مثل التصنيع والزراعة.






