استكشاف الرؤية الحاسوبية في تطبيقات الملاحة
شاهد كيف تعمل الرؤية الحاسوبية في حلول الملاحة على تحسين الخرائط في الوقت الفعلي، والتعرف على الأشياء، والواقع المعزز لتجارب سفر أكثر ذكاءً وأماناً.

في الوقت الحاضر، أصبح إخراج هاتفك، وكتابة وجهتك، واتباع الاتجاهات خطوة بخطوة للوصول إلى هناك أمراً يبدو سهلاً. إنه شيء يستغرق بضع ثوانٍ فقط. لكن هذه الراحة اليومية هي نتيجة لسنوات من التقدم التكنولوجي. لقد قطعت الملاحة شوطاً طويلاً، من الخرائط الورقية والبوصلات إلى الأنظمة الذكية التي يمكنها فهم العالم والاستجابة له في الوقت الفعلي.
إحدى التقنيات الكامنة وراء هذا التحول هي الرؤية الحاسوبية، وهي فرع من الذكاء الاصطناعي (AI) الذي يسمح للآلات بتفسير المعلومات المرئية مثلما يفعل البشر. تستخدم أدوات الملاحة المتطورة الآن صوراً في الوقت الفعلي من الأقمار الصناعية، وكاميرات لوحة القيادة، وأجهزة استشعار على مستوى الشارع لتحسين دقة الخرائط، ومراقبة ظروف الطريق، وتوجيه المستخدمين عبر البيئات المعقدة.
في هذه المقالة، سنستكشف كيف تعزز الرؤية الحاسوبية الملاحة من خلال تحسين خرائط GPS، وتقديم تحديثات مرورية في الوقت الفعلي، ودعم تقنيات مثل الملاحة بالواقع المعزز والمركبات ذاتية القيادة.
Link to this sectionأنظمة ملاحة تعمل بالذكاء الاصطناعي مع خرائط ثلاثية الأبعاد غامرة#
أصبح استخدام أدوات مثل Google Maps للتنقل في الحياة اليومية أمراً شائعاً جداً، سواء كنت تتجه عبر المدينة أو تبحث عن مقهى قريب. مع تبني تقنيات الذكاء الاصطناعي على نطاق أوسع، نشهد ميزات متقدمة بشكل متزايد مثل Immersive View، التي قدمتها Google Maps في عام 2023، والتي تتيح للمستخدمين معاينة أجزاء من رحلتهم في بيئة ثلاثية الأبعاد. أصبح هذا ممكناً من خلال مزيج من الذكاء الاصطناعي، والتصوير المساحي، والرؤية الحاسوبية.
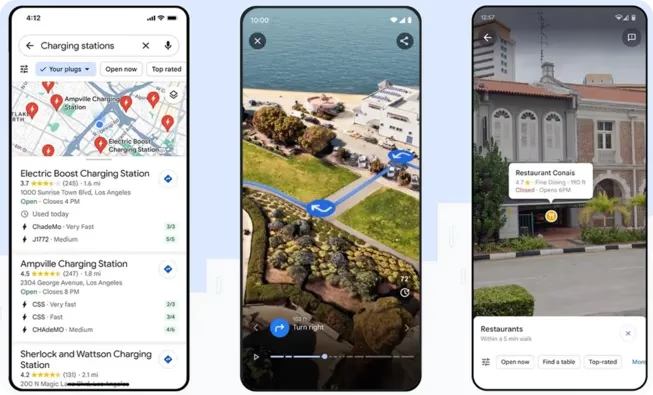
Fig 1. عرض Immersive View في خرائط Google.
يبدأ كل شيء بمليارات الصور عالية الدقة التي تلتقطها مجموعة من المعدات المتخصصة. ويشمل ذلك سيارات Street View، وهي مركبات مجهزة بكاميرات بزاوية 360 درجة تتجول في المدن، وأجهزة Trekker، وهي حقائب ظهر قابلة للارتداء مزودة بكاميرات تُستخدم لالتقاط الصور في أماكن لا يمكن للمركبات الوصول إليها، مثل مسارات المشي لمسافات طويلة أو الأزقة الضيقة.
يتم محاذاة هذه الصور مع بيانات الخريطة باستخدام التصوير المساحي، وهي تقنية تقوم بخياطة الصور ثنائية الأبعاد الملتقطة من زوايا مختلفة معاً لإنشاء نماذج ثلاثية الأبعاد دقيقة للشوارع والمباني والتضاريس.
ثم تُستخدم الرؤية الحاسوبية لتحليل هذه النماذج باستخدام كشف الكائنات وتجزئة الصور لتحديد وتصنيف الميزات المهمة مثل علامات الطرق، والأرصفة، وممرات المشاة، ومداخل المباني.

Fig 2. يستخدم Immersive View التجزئة لفصل الكائنات في الشارع.
تُستخدم البيانات المصنفة لتدريب أنظمة الذكاء الاصطناعي التي تتعرف على كيفية اختلاف الإشارات المرئية عبر المناطق. على سبيل المثال، يمكن للنظام بسهولة التمييز بين علامة "SLOW" (تمهل) في الولايات المتحدة، والتي عادة ما تكون على شكل معين أصفر أو برتقالي، وعلامة مشابهة في اليابان، والتي تكون عادة مثلثاً أحمر وأبيض. هذا المستوى من الفهم يجعل تجربة الملاحة أكثر دقة ووعياً ثقافياً.
أخيراً، يقوم Immersive View بتراكب مسارات الملاحة الحية فوق البيئة ثلاثية الأبعاد، مما يوفر تجربة سلسة وبديهية توضح تماماً إلى أين تتجه.
Link to this sectionالواقع المعزز في حلول الملاحة#
ربما مررنا جميعاً بتجربة الدوران في دوائر ومحاولة معرفة الاتجاه الذي تشير إليه Google Maps. هذا الارتباك هو بالضبط ما تهدف إليه ملاحة الواقع المعزز (AR)، وهي تقنية تقوم بتراكب المعلومات الرقمية فوق عرض الكاميرا للعالم الحقيقي. إنها تغير الطريقة التي يجد بها الناس طريقهم في الأماكن المزدحمة مثل شوارع المدينة أو المناطق الداخلية الكبيرة.
قد يكون من الصعب اتباع الخرائط العادية، خاصة عندما تكون إشارات GPS ضعيفة أو لا تعمل بشكل جيد. تعالج ملاحة AR هذا الأمر من خلال عرض اتجاهات رقمية، وأسهم، وتسميات مباشرة على عرض الكاميرا المباشر للعالم الحقيقي. وهذا يعني أن المستخدمين يرون إرشادات تتوافق مع الشوارع والمباني من حولهم، مما يسهل عليهم معرفة الطريق.
Link to this sectionكيف يتم استخدام الواقع المعزز في الملاحة#
تعتمد ملاحة AR على نماذج الرؤية الحاسوبية لفهم البيئة من خلال كاميرا الجهاز. يتضمن ذلك مهاماً متنوعة مثل تحديد الموقع بالصور، والذي يكتشف ميزات مثل حواف المباني أو علامات الشوارع ويطابقها مع خريطة مخزنة. كما يقوم التحديد المتزامن للموقع ورسم الخرائط (SLAM) بإنشاء خريطة للبيئة مع تتبع موقع الجهاز في الوقت الفعلي.
على سبيل المثال، كان مطار زيورخ أول من طبق ميزة Live View من Google Maps للملاحة الداخلية. يمكن للمسافرين استخدام كاميرات هواتفهم لرؤية أسهم واتجاهات متراكبة في بيئة العالم الحقيقي، مما يرشدهم عبر الصالات إلى البوابات والمتاجر والخدمات. هذا يحسن تجربة المسافر من خلال تسهيل الملاحة في المساحات الداخلية المعقدة.

Fig 3. يستخدم مطار زيورخ الرؤية الحاسوبية والواقع المعزز لتوجيه المسافرين في الداخل.
Link to this sectionتعزيز سلامة الطرق باستخدام أنظمة الملاحة بالذكاء الاصطناعي#
تزداد شوارع المدينة ازدحاماً يوماً بعد يوم. مع وجود المزيد من السيارات على الطريق، والأرصفة المزدحمة، والنشاط المستمر، أصبح الحفاظ على تدفق حركة المرور بسلاسة وأمان تحدياً متزايداً. للمساعدة في إدارة هذه الفوضى، تتجه العديد من المدن إلى الذكاء الاصطناعي والرؤية الحاسوبية.
الكاميرات الذكية وأجهزة الاستشعار المثبتة عند التقاطعات وعلى طول الطرق تلتقط تدفقاً ثابتاً من البيانات المرئية. تتم معالجة هذه اللقطات في الوقت الفعلي لاكتشاف الحوادث، ومراقبة تدفق حركة المرور، ورصد الحفر، وضبط مخالفات مثل الوقوف غير القانوني أو سلوك المشاة المحفوف بالمخاطر.
مثال مثير للاهتمام على ذلك هو طريق المطار السريع الذكي في هانغتشو، الصين. تم ترقية هذا الطريق السريع الذي يبلغ طوله 20 كيلومتراً، والذي يربط وسط مدينة هانغتشو بمطار شياوشان الدولي، بكاميرات عالية الدقة ورادارات ذات موجات مليمترية. تقوم هذه الأجهزة باستمرار بجمع بيانات الفيديو وأجهزة الاستشعار، والتي يتم تحليلها بعد ذلك باستخدام الرؤية الحاسوبية.
بدلاً من مجرد تسجيل اللقطات، يفسر النظام ما يحدث على الطريق. تكتشف خوارزميات الرؤية الحاسوبية تصادم المركبات، وتتعرف على مخالفات المرور، بل وتحدد المشاة أو الحركات غير المعتادة بالقرب من مخارج الطرق السريعة. وهذا يسمح لمسؤولي المرور بالاستجابة للحوادث في غضون ثوانٍ، دون الحاجة إلى التواجد فعلياً في الموقع.
تغذي البيانات أيضاً توأماً رقمياً: نموذج افتراضي ثلاثي الأبعاد مباشر للطريق السريع يعرض ظروف المرور في الوقت الفعلي، وتفاصيل المركبات، والازدحام الناشئ. يراقب ضباط المرور هذه الواجهة المرئية لإدارة التدفق، وإصدار تنبيهات ذكية، والاستجابة للحوادث بسرعة ودقة.
Link to this sectionالتنقل الذاتي المدعوم بالرؤية الحاسوبية في الملاحة#
تتجاوز الملاحة اليوم مجرد الانتقال من النقطة أ إلى النقطة ب. إنها الآن جزء حيوي من الأنظمة الذكية التي تحرك الأشخاص، وتدير البضائع، وتتخذ قرارات في الوقت الفعلي - سواء على الطريق أو داخل المستودعات.
في قلب العديد من هذه الأنظمة تكمن الرؤية الحاسوبية، التي تمكن الآلات من تفسير البيانات المرئية والاستجابة فوراً لمحيطها. دعونا نستعرض بعض الأمثلة لنرى كيف تعمل هذه التكنولوجيا على تغيير الملاحة في بيئات مختلفة.
Link to this sectionروبوتات المستودعات التي تتنقل باستخدام الرؤية الحاسوبية#
الروبوتات أصبحت ضرورية لمستقبل الخدمات اللوجستية، خاصة في عمليات المستودعات واسعة النطاق. مع نمو الطلب على التجارة الإلكترونية، تعتمد الشركات بشكل متزايد على الآلات المدعومة بالرؤية الحاسوبية للتنقل في البيئات المعقدة، وفرز العناصر، وإدارة المخزون بسرعة ودقة.
خذ على سبيل المثال مراكز تلبية الطلبات التابعة لـ Amazon، حيث يعمل أكثر من 750,000 روبوت جنباً إلى جنب مع البشر للحفاظ على كفاءة العمليات. تعتمد هذه الروبوتات بشكل كبير على الرؤية الحاسوبية للتنقل في أرضيات المستودعات المزدحمة، وتحديد العناصر، واتخاذ قرارات سريعة ودقيقة.
أحد هذه الأنظمة هو Sequoia، وهو منصة روبوتية مصممة لتسريع التعامل مع المخزون. يستخدم الرؤية الحاسوبية المتقدمة لمسح المنتجات الواردة، وعدها، وتنظيمها، مما يساعد في تبسيط عمليات التخزين والاسترجاع.
وبالمثل، يستخدم Vulcan، وهو ذراع روبوتية، الكاميرات وتحليل الصور لالتقاط العناصر بأمان من الأرفف، مع تعديل قبضته بناءً على شكل وموقع كل كائن وحتى التعرف على متى تكون المساعدة البشرية مطلوبة. في الوقت نفسه، يتخصص Cardinal، وهو روبوت آخر يعمل بالرؤية، في الفرز: فهو يمسح أكواماً مختلطة من الطرود ويضعها بدقة في عربات النقل الصحيحة.

Fig 4. روبوت Cardinal يرفع الطرود بدقة من كومة.
Link to this sectionالرؤية الحاسوبية في ملاحة المركبات ذاتية القيادة#
حتى الآن، رأينا كيف تساعد الرؤية الحاسوبية كلاً من البشر والروبوتات في التنقل في بيئاتهم. لكنها لا تقل أهمية بالنسبة للأنظمة ذاتية القيادة، مثل السيارات ذاتية القيادة، حيث تعتمد الملاحة كلياً على ما يمكن للمركبة رؤيته وفهمه في الوقت الفعلي.
مثال جيد هو نظام Tesla Vision. تبنت تسلا نهجاً يعتمد فقط على الكاميرات للقيادة الذاتية، مما أدى إلى إزالة الرادار وأجهزة الاستشعار الأخرى لصالح شبكة من الكاميرات التي توفر رؤية كاملة بزاوية 360 درجة لمحيط السيارة. تغذي هذه الكاميرات بيانات مرئية إلى كمبيوتر القيادة الذاتية الكاملة (FSD)، الذي يستخدم شبكات عصبية عميقة لتفسير البيئة واتخاذ قرارات قيادة في أجزاء من الثانية.
بناءً على ما يراه، يقرر النظام متى يجب التوجيه، أو التسارع، أو الكبح، أو تغيير المسارات - تماماً كما يفعل السائق البشري، ولكن بالكامل من خلال المدخلات المرئية. تعمل تسلا باستمرار على تحسين هذا النظام من خلال جمع والتعلم من كميات هائلة من بيانات القيادة في العالم الحقيقي عبر أسطولها.

الشكل 5. تستخدم تسلا الرؤية الحاسوبية للملاحة الآمنة والذاتية (المصدر: تسلا).
Link to this sectionإيجابيات وسلبيات الرؤية الحاسوبية في الملاحة#
فيما يلي بعض المزايا الرئيسية لاستخدام الرؤية الحاسوبية في الملاحة، خاصة في الأنظمة التي تكون فيها الدقة والسلامة واتخاذ القرار في الوقت الفعلي ضرورية:
- يقلل من استهلاك الوقود: من خلال مساعدة السائقين على تجنب حركة المرور وطرق التوقف والانطلاق، يمكن للرؤية الحاسوبية تقليل استهلاك الوقود الإجمالي ووقت السفر، مما يجعل التنقلات اليومية أكثر كفاءة.
- يكتشف تآكل الطرق ومشكلات البنية التحتية: يمكن لـ الحلول القائمة على الرؤية مسح الحفر، وعلامات المسارات الباهتة، والعلامات المكسورة، والبنية التحتية التالفة، وتزويد فرق الصيانة ببيانات موثوقة في الوقت الفعلي.
- يتكامل بسلاسة مع أدوات الذكاء الاصطناعي الأخرى: يمكن دمج الرؤية الحاسوبية مع المساعدين الصوتيين، أو نماذج التنبؤ بالسلوك، أو خوارزميات تحسين المسار لإنشاء تجربة ملاحة ذكية وشخصية للغاية.
بينما تجلب الرؤية الحاسوبية العديد من الفوائد للملاحة، إلا أنها تأتي أيضاً مع بعض القيود المهمة التي يجب مراعاتها عند تنفيذ مثل هذه الحلول. فيما يلي بعض التحديات الرئيسية التي يجب وضعها في الاعتبار:
- نقص التعميم: غالباً ما تواجه النماذج المدربة على بيئات أو سيناريوهات محددة صعوبات عند نشرها في سياقات جديدة أو متغيرة دون إعادة تدريب.
- قيود الإضاءة: تعتمد أنظمة الرؤية على الإضاءة الجيدة والطقس الصافي لتعمل بشكل جيد. في الضباب، أو الأمطار الغزيرة، أو الظلام، ينخفض أداؤها ما لم يتم دمجها مع أجهزة استشعار مثل LiDAR أو الرادار.
- مخاطر الخصوصية: يمكن لأنظمة الملاحة التي تستخدم الكاميرات التقاط صور للأشخاص والممتلكات الخاصة دون موافقة. وهذا يثير قضايا الخصوصية التي يجب معالجتها بعناية أثناء التطوير والنشر.
Link to this sectionأبرز النقاط#
تعيد الرؤية الحاسوبية ابتكار الملاحة من خلال جعل الخرائط أكثر ديناميكية، وأنظمة المرور أكثر ذكاءً، والتنقل أكثر سهولة. ما كان يوماً مسارات ثابتة أصبح الآن تجارب تفاعلية في الوقت الفعلي - مدعومة بمعاينات ثلاثية الأبعاد غامرة، واتجاهات موجهة بالواقع المعزز، وتقنيات النقل الذاتي.
مع تقدم التكنولوجيا، من المرجح أن يتحول التركيز نحو جعل هذه الأنظمة أكثر شمولاً وقابلية للتكيف ومسؤولية. سيعتمد التقدم المستمر على تحسين الدقة عبر البيئات المتنوعة، والحفاظ على أداء موثوق، وحماية خصوصية المستخدم. يكمن مستقبل الرؤية الحاسوبية في الملاحة في بناء حلول ليست ذكية فحسب، بل تراعي أيضاً تصميمها وتأثيرها.
انضم إلى مجتمعنا المتنامي! استكشف مستودع GitHub الخاص بنا للتعرف على الذكاء الاصطناعي، وتحقق من خيارات الترخيص لدينا لبدء مشاريع الذكاء الاصطناعي البصري الخاصة بك. هل أنت مهتم بالابتكارات مثل الذكاء الاصطناعي في البيع بالتجزئة والرؤية الحاسوبية في الزراعة؟ تفضل بزيارة صفحات الحلول الخاصة بنا لاكتشاف المزيد!






