اتجاهات مستقبل اكتشاف الكائنات: 7 أشياء رئيسية يجب مراقبتها
تعرف على سبعة اتجاهات مستقبلية في اكتشاف الكائنات التي تقود التطورات في الرؤية الحاسوبية، مما يتيح أنظمة مدعومة بالذكاء الاصطناعي أسرع وأذكى وأكثر موثوقية.
أصبحت سيارات الأجرة ذاتية القيادة (Robotaxis) تتجول الآن في شوارع سان فرانسيسكو، وانتقل الناس من البحث عن إجابات عبر الإنترنت إلى الدردشة مع الذكاء الاصطناعي كجزء من روتينهم اليومي. توضح هذه التحولات أن الذكاء الاصطناعي (AI) يتحرك بشكل أسرع من أي وقت مضى ويصبح جزءاً من الحياة اليومية.
على سبيل المثال، أحد المجالات التي تتقدم بوتيرة مذهلة هي تقنية الرؤية الحاسوبية. وتُعرف أيضاً باسم رؤية الذكاء الاصطناعي (vision AI)، وهي مجال فرعي من الذكاء الاصطناعي يركز على مساعدة الآلات في تفسير وفهم البيانات المرئية.
تظهر الرؤية الحاسوبية بالفعل في كل مكان، بدءاً من ممرات الدفع الآلي وصولاً إلى الطائرات بدون طيار التي تتفقد خطوط الكهرباء. وفي قلب العديد من هذه الأنظمة يوجد اكتشاف الكائنات، وهي مهمة أساسية في الرؤية الحاسوبية تمكّن الآلات من التعرف على كائنات محددة وتحديد موقعها داخل الصور والفيديو.
مع تسارع تبني الذكاء الاصطناعي، يزداد الطلب على اكتشاف الكائنات الذي يتميز بالسرعة والدقة في آن واحد. تم تصميم نماذج رؤية الذكاء الاصطناعي مثل Ultralytics YOLO11 ونموذج Ultralytics YOLO26 القادم مع وضع هذا الأمر في الاعتبار، مما يجعل اكتشاف الكائنات في الوقت الفعلي أكثر موثوقية وسهولة في الوصول من أي وقت مضى.
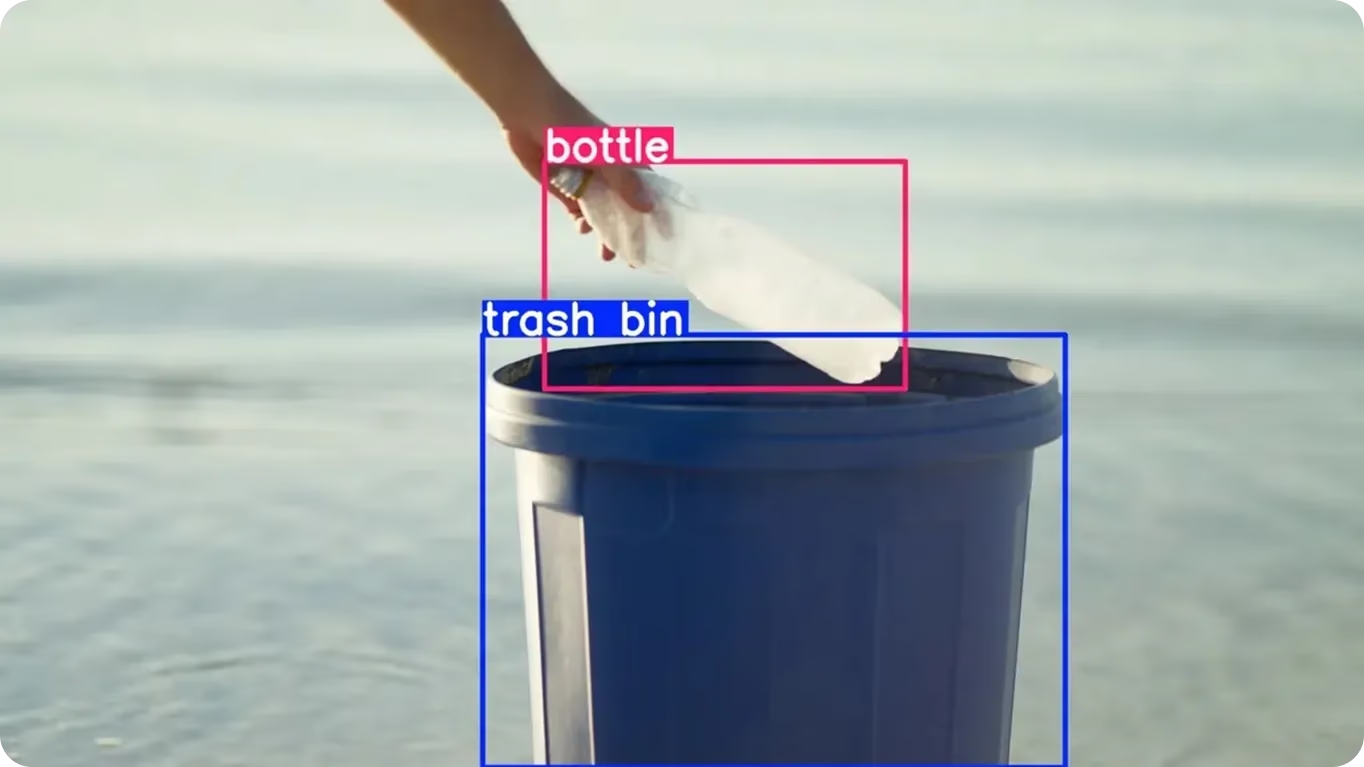
الشكل 1. مثال على استخدام YOLO11 لاكتشاف الكائنات.
مع هذا التقدم السريع، يتطور المجال بسرعة، وتتشكل العديد من الاتجاهات الناشئة التي ستحدد شكل الجيل القادم من اكتشاف الكائنات. في هذه المقالة، سوف نستكشف سبعة اتجاهات رئيسية تحدد مستقبل اكتشاف الكائنات.
Link to this sectionفهم كيفية عمل اكتشاف الكائنات#
قبل أن نتعمق في اتجاهات اكتشاف الكائنات المستقبلية، دعونا نرجع خطوة إلى الوراء لنلقي نظرة على ماهية اكتشاف الكائنات، وكيف يعمل خلف الكواليس، وكيف تطور على مر السنين.
اكتشاف الكائنات هو جزء رئيسي من الرؤية الحاسوبية يجعل من الممكن لأنظمة الذكاء الاصطناعي تحديد ما يوجد في الصورة وتحديد موقع كل عنصر بدقة. لتعلم ذلك، يتم تدريب النماذج على مجموعات بيانات كبيرة ومصنفة توضح الكائنات في ظروف مختلفة، مثل زوايا وإضاءة وأحجام وتخطيطات متنوعة.
بمرور الوقت، يلتقط النموذج الأنماط والإشارات المرئية التي تفصل كائناً عن آخر. وبمجرد تدريبها، يمكن لـ نماذج رؤية الذكاء الاصطناعي مثل Ultralytics YOLO مسح الصورة بأكملها في تمريرة واحدة، ورسم صناديق الإحاطة (bounding boxes) وتعيين التسميات على الفور. هذه السرعة والدقة هي ما يجعل اكتشاف الكائنات مؤثراً في تطبيقات العالم الحقيقي.
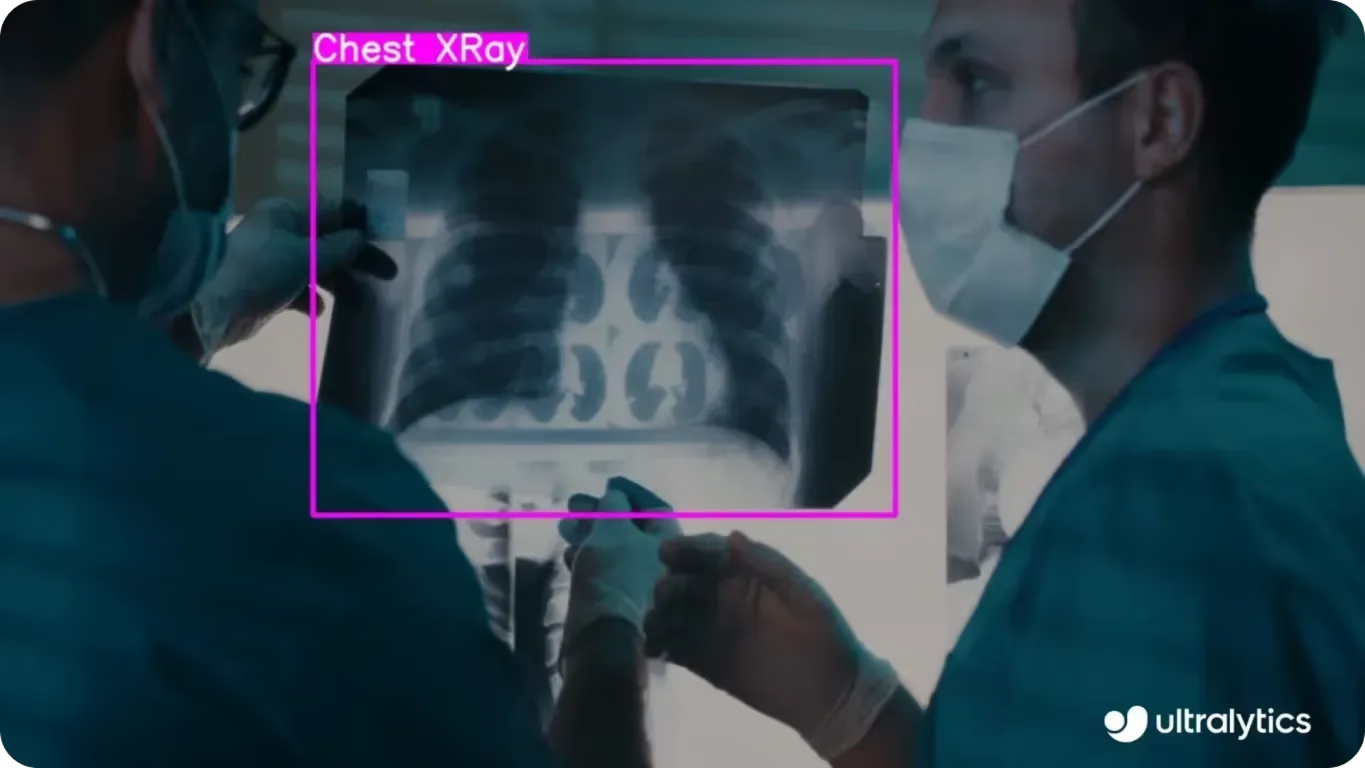
الشكل 2. اكتشاف صورة أشعة سينية باستخدام نموذج YOLO11. (المصدر)
Link to this sectionحالة استخدام حقيقية لاكتشاف الكائنات في العمل#
على سبيل المثال، في تحليل المستندات، تستخدم شركات مثل Prezent اكتشاف الكائنات لأتمتة المهمة الصعبة المتمثلة في إعادة تصميم شرائح العرض التقديمي. تقليدياً، كانت هذه العملية تتطلب ساعات من التعديلات اليدوية، وتحديد العناوين، وإعادة وضع مربعات النص، ومحاذاة الصور، وإعادة بناء المخططات، كل ذلك أثناء محاولة الحفاظ على تخطيط نظيف ومتسق.
من خلال تحويل كل شريحة إلى صورة، يمكن لنماذج Ultralytics YOLO اكتشاف العناوين ومربعات النص والصور والمخططات مع الحفاظ على الهيكل الأصلي. وهذا يمنح النظام فهماً دقيقاً لكيفية ترتيب كل عنصر. ومع تلك المعلومات، يمكن الآن أتمتة عملية إعادة التصميم بأكملها، التي كانت يوماً ما بطيئة ومملة، في ثوانٍ فقط.
Link to this sectionتطور اكتشاف الكائنات في الرؤية الحاسوبية#
إليك نظرة سريعة على كيفية تطور اكتشاف الكائنات على مر السنين:
-
الأيام الأولى (الستينيات - السبعينيات): جاءت المنهجيات المبكرة في اكتشاف الكائنات من معالجة الصور التقليدية وكانت تعتمد غالباً على مطابقة القوالب. في هذا النهج، كانت أجهزة الكمبيوتر تقارن أجزاءً من الصورة (بكسلات) مقابل أنماط مرجعية محددة مسبقاً، أو قوالب، للبحث عن أوجه التشابه. نظراً لأن هذه القوالب كانت ثابتة ولم تستطع التكيف مع التغييرات، فقد عملت الطريقة فقط في ظروف مثالية. حتى الاختلافات الصغيرة في الإضاءة أو النطاق أو الدوران أو مظهر الكائن كانت كافية لتسبب فشلها.
-
الاكتشاف القائم على الميزات (التسعينيات - العقد الأول من القرن الحادي والعشرين): تحول الباحثون بعد ذلك إلى فكرة الميزات المصممة يدوياً واستخراج الميزات، حيث قام البشر بتعريف الإشارات المرئية التي يجب أن يبحث عنها الكمبيوتر يدوياً، مثل الحواف والزوايا والأشكال أو التغيرات في السطوع. تقنيات مثل Haar Cascades (طريقة تمسح الأنماط المرئية البسيطة، وغالباً ما تُستخدم لاكتشاف الوجوه) وHOG (تقنية تلتقط اتجاه الحواف والمخططات التفصيلية في الصورة)، والتي كانت تُقترن غالباً بمصنفات SVM (نموذج تعلم آلي يفصل الكائنات إلى فئات)، جعلت التعرف على الكائنات أكثر دقة وسرعة. حتى مع هذه التحسينات، لا تزال الأنظمة تواجه صعوبة في العمل بسرعة كافية للاستخدام في الوقت الفعلي.
-
ثورة نماذج التعلم العميق (العقد الثاني من القرن الحادي والعشرين): أعاد التعلم العميق والشبكات العصبية التلافيفية (CNNs)، وهي نماذج مصممة لتعلم الأنماط المرئية عن طريق مسح الصور في مناطق صغيرة في كل مرة، تعريف اكتشاف الكائنات. تعلمت نماذج مثل R-CNN وFast R-CNN وFaster R-CNN الأنماط المرئية مباشرة من كميات كبيرة من البيانات. أدى ذلك إلى مخرجات ذات دقة عالية، لكن هذه النماذج لا تزال تواجه مشكلات في زمن الاستجابة.
-
الاكتشاف في الوقت الفعلي باستخدام YOLO (منتصف العقد الثاني من القرن الحادي والعشرين): مثّل YOLO (أنت تنظر مرة واحدة فقط) طفرة كبيرة في اكتشاف الكائنات من خلال التنبؤ بجميع صناديق الإحاطة وتسميات الفئات في تمريرة واحدة عبر الشبكة. أدى هذا النهج الموحد إلى زيادة سرعة الاكتشاف بشكل كبير ومهد الطريق لتطبيقات الوقت الفعلي. في نفس الوقت تقريباً، حسنت نماذج أخرى أحادية اللقطة مثل SSD (كاشف اللقطة الواحدة) الأداء أيضاً عن طريق إزالة خطوات اقتراح المنطقة، مما جعل اكتشاف الكائنات أسرع وأكثر كفاءة.
-
التطورات الأخيرة (العقد الثالث من القرن الحادي والعشرين): بفضل التحسينات الرئيسية في تصميم النماذج وتحسين الأداء، جلبت عشرينيات القرن الحالي أنظمة وأطر عمل لاكتشاف الكائنات أسرع وأكثر دقة وأحدث طرازاً. قدمت Ultralytics YOLO11 ترقيات معمارية حسنت سرعة المعالجة والدقة والأداء العام في الوقت الفعلي. وبناءً على هذا الزخم، يتميز YOLO26 القادم بتصميم أكثر كفاءة وخفة، مما يجعله مناسباً تماماً لمجموعة واسعة من التطبيقات العملية.
Link to this section7 اتجاهات لاكتشاف الكائنات تشكل المستقبل#
بعد ذلك، دعونا نستكشف سبعة اتجاهات ناشئة لاكتشاف الكائنات تكتسب اهتماماً وتخلق ضجة في مجال الرؤية الحاسوبية.
Link to this sectionمهام اكتشاف كائنات أكثر ذكاءً مع الحوسبة الطرفية#
يمكن للفحوصات اليدوية التقليدية أن تبطئ خطوط الإنتاج وتترك مجالاً للعيوب التي قد يتم تفويتها. للتعامل مع هذا، تتجه العديد من الشركات إلى أنظمة مراقبة الجودة القائمة على الذكاء الاصطناعي والمدعومة باكتشاف الكائنات.
في الواقع، تظهر الدراسات أن الفحص البصري القائم على الذكاء الاصطناعي يمكن أن يعزز الإنتاجية بشكل كبير، أحياناً بنسبة تصل إلى 50%، ويزيد من معدلات اكتشاف العيوب بنسبة تصل إلى 90% مقارنة بالفحص اليدوي. ومن المثير للاهتمام أن الاتجاه الجديد الذي يُحدث ضجة في هذا المجال وتطبيقات رؤية الذكاء الاصطناعي الأخرى هو كيف يحدث هذا التحليل الآن مباشرة على الأجهزة نفسها من خلال الحوسبة الطرفية (edge computing).
مع الحوسبة الطرفية، ينتقل الذكاء إلى مكان التقاط البيانات. يمكن للكاميرات وأجهزة الاستشعار تشغيل نماذج اكتشاف الكائنات في الموقع، وتحديد الكائنات فوراً وتحديد موقعها دون الاعتماد على المعالجة السحابية. وهذا يسمح لهم بتحليل الإطارات في الوقت الفعلي.
كما أنه يقلل من تأخيرات الشبكة، ويقلل من استخدام النطاق الترددي، ويضمن استمرار عمل الأنظمة حتى لو كان اتصال الإنترنت غير مستقر أو غير متاح. بالنسبة للبيئات سريعة الخطى مثل التصنيع، يوفر هذا التحول إلى المعالجة على الجهاز استجابات أسرع وعمليات أكثر سلاسة ونتائج أكثر موثوقية بكثير.
Link to this sectionالتشخيص المدعوم بالرؤية في الرعاية الصحية#
غالباً ما يقضي الأطباء الكثير من الوقت في مراجعة الصور الطبية للتأكد من عدم إغفال أي شيء. في الوقت الحاضر، بدأت العديد من المستشفيات في استكشاف تقنية اكتشاف الكائنات المتطورة للمساعدة في تسريع الأمور. يعكس هذا اتجاهاً أوسع في الرعاية الصحية، حيث يتم استخدام رؤية الذكاء الاصطناعي بشكل متزايد لدعم الاكتشاف المبكر، والتشخيص الأسرع، وتحليل الصور الأكثر اتساقاً.
يمكن استخدام اكتشاف الكائنات لتسليط الضوء بسرعة على المناطق التي قد تحتاج إلى اهتمام، مما يعزز اتخاذ القرار ويحسن نتائج المرضى. على سبيل المثال، يمكن لنماذج مثل YOLO11 مساعدة الأطباء في اكتشاف أورام المخ في صور الرنين المغناطيسي.
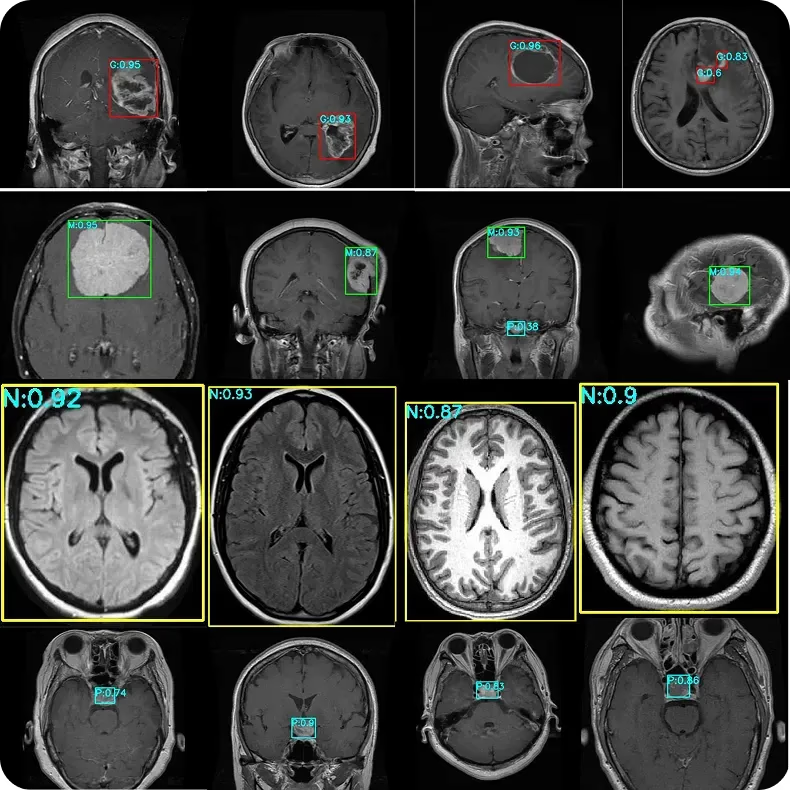
الشكل 3. اكتشاف وتحديد مواقع أورام المخ في صور الرنين المغناطيسي بمساعدة YOLO11. (المصدر)
نظراً لأن YOLO11 يمكنه التعرف على الأنماط الدقيقة في صور الرنين المغناطيسي، فإنه يمكن أن يساعد في تحديد الأورام الصغيرة أو في مراحلها المبكرة بدقة أكبر. بينما يتخذ الأطباء التشخيص النهائي، يمكن لأدوات مثل YOLO11 المساعدة في تبسيط مراجعتهم من خلال طرح المخاوف المحتملة في وقت أقرب والمساعدة في ضمان عدم تفويت أي شيء مهم.
Link to this sectionالمركبات ذاتية القيادة والرؤية في الوقت الفعلي لتنقل أكثر أماناً#
في شوارع المدينة المزدحمة، تعتمد السيارات ذاتية القيادة على الكاميرات وأجهزة الاستشعار لمراقبة محيطها باستمرار. تكتشف هذه الأنظمة المشاة والمركبات والممرات وإشارات المرور في الوقت الفعلي. بمساعدة خوارزميات الرؤية الحاسوبية واكتشاف الكائنات، يمكن للسيارة ذاتية القيادة تفسير ما يحدث حولها واتخاذ قرارات قيادة ذاتية أكثر أماناً.
في المناطق ذات أنماط حركة المرور المتنوعة ومزيج المركبات، تواجه هذه الأنظمة تعقيداً إضافياً. على سبيل المثال، قامت دراسة حديثة بتقييم نماذج Ultralytics YOLOv8 على بيانات مرورية تم جمعها من حيدر أباد وبنغالور، حيث تتشارك مجموعة متنوعة من المركبات، مثل السيارات والحافلات والدراجات النارية والدراجات وعربات التوك توك، الطريق بطرق ديناميكية وغير متوقعة في كثير من الأحيان.
أظهرت النتائج أن YOLOv8 كان قوياً عبر هذه السيناريوهات الصعبة، حيث اكتشف بدقة مجموعة واسعة من الكائنات حتى في ظروف المرور الكثيفة وغير المنظمة. يسلط هذا الضوء على اتجاه متزايد في التنقل الذاتي: أصبحت نماذج رؤية الذكاء الاصطناعي قادرة بشكل متزايد على التعامل مع البيئات المعقدة في العالم الحقيقي التي كانت تشكل تحديات كبيرة للأنظمة الآلية في السابق.
Link to this sectionالأتمتة الذكية والروبوتات باستخدام الرؤية الحاسوبية#
لطالما كان التعامل مع الكائنات الصغيرة، أو فرز الكائنات والمواد المكتشفة، أو التنقل في المساحات المزدحمة أمراً صعباً للروبوتات. تتطلب هذه المهام تكيفاً سريعاً وحركة دقيقة، وهو أمر غالباً ما تكافح معه أنظمة الأتمتة التقليدية في البيئات غير المتوقعة.
أحد الاتجاهات المتزايدة في الروبوتات هو استخدام رؤية الذكاء الاصطناعي لمنح الروبوتات القدرة على إدراك محيطها والاستجابة له في الوقت الفعلي. لاستكشاف هذا التحول، طور مجموعة من الباحثين مؤخراً روبوتاً منزلياً قادراً على التعرف على الكائنات وفرزها أثناء تحركه عبر المساحات الداخلية.
باستخدام نماذج مثل YOLO11 لاكتشاف الكائنات، إلى جانب كاميرا عمق وقبضة مرنة، تمكن الروبوت من تحديد العناصر ذات الأشكال والأحجام المختلفة ووضعها في المواقع الصحيحة بمفرده. توضح هذه التجربة كيف يمكن للجمع بين الرؤية الحاسوبية والأنظمة الروبوتية تحسين الوعي المكاني والاستجابة.
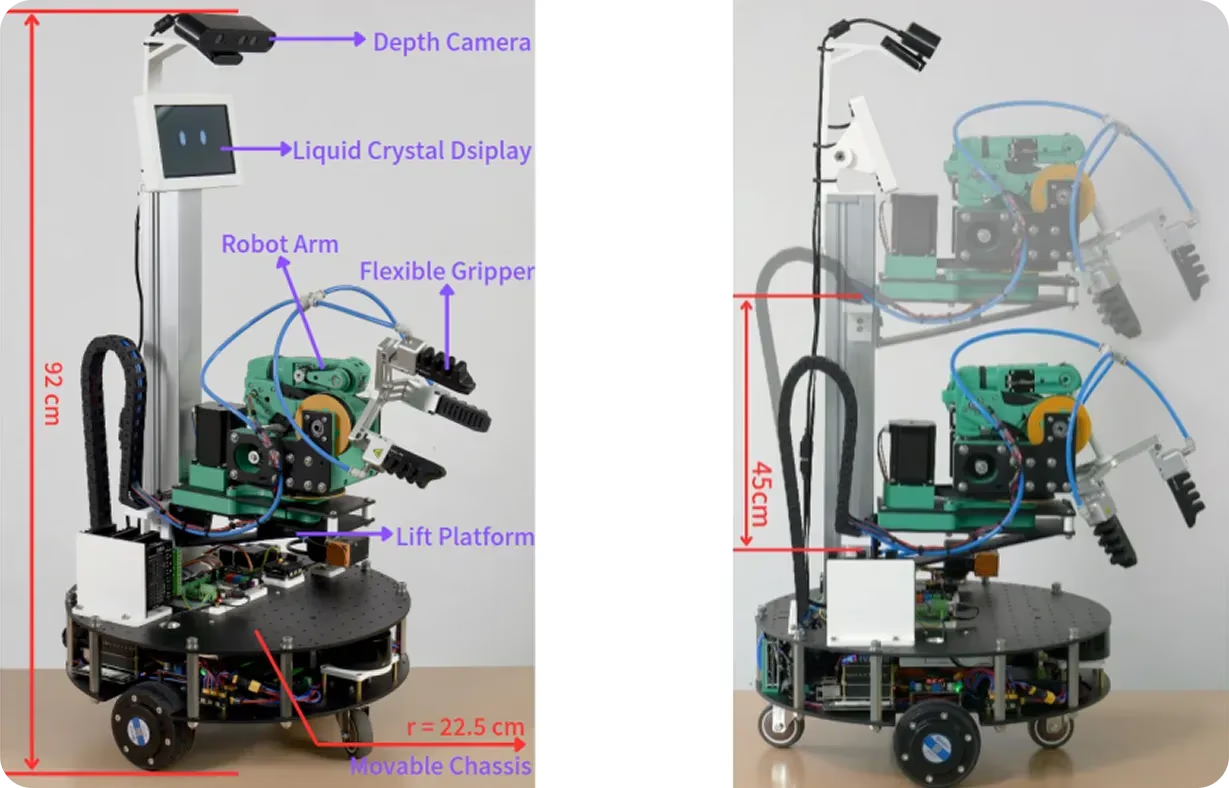
الشكل 4. روبوت يستخدم YOLO11 واستشعار العمق لاتخاذ قرارات ذكية. (المصدر)
كما أنه يوضح كيف تساعد تقنيات الذكاء الاصطناعي المتطورة الروبوتات على التكيف مع البيئات غير المألوفة من خلال التعلم من الأنماط المرئية بمرور الوقت. مع هذه التطورات، أصبحت الروبوتات أكثر قدرة وأكثر اندماجاً في المهام اليومية، من المساعدة المنزلية إلى الخدمات اللوجستية في المستودعات ودعم الرعاية الصحية.
Link to this sectionأنظمة المراقبة والأمن الاستباقية#
تتبنى أنظمة المراقبة الذكية الذكاء الاصطناعي بسرعة لاكتشاف الأنشطة غير العادية أو غير الآمنة. باستخدام نماذج اكتشاف الكائنات، يمكن للكاميرات التعرف على المشكلات المحتملة في الوقت الفعلي وتنبيه فرق الأمن على الفور، مما يساعد في تحسين كل من الوقاية والاستجابة.
على سبيل المثال، في منشآت التصنيع حيث يتم تقييد استخدام الهواتف الذكية لأسباب تتعلق بالسلامة، يمكن لأنظمة الذكاء الاصطناعي اكتشاف الهواتف تلقائياً بمجرد ظهورها وتتبع حركتها باستخدام YOLO ونماذج الرؤية الأخرى. يعكس هذا اتجاهاً أوسع في الأمن، حيث تُستخدم رؤية الذكاء الاصطناعي لمراقبة البيئات بشكل أكثر استباقية والاستجابة بشكل أسرع للمخاطر المحتملة.
بالإضافة إلى الاكتشاف، يتم دمج هذه الأنظمة بشكل متزايد مع تقنيات أخرى لإنشاء حل أمني أكثر اكتمالاً. تسمح الأجهزة الطرفية بمعالجة اللقطات محلياً، مما يقلل من التأخير ويحافظ على موثوقية الأداء، بينما يمكن لأدوات مثل أنظمة التحكم في الوصول أو التعرف على الوجه إضافة طبقة إضافية من التحقق. معاً، تعمل هذه التقنيات على إنشاء شبكات مراقبة أكثر ذكاءً وترابطاً يمكنها الاستجابة بسرعة وفعالية لمواقف العالم الحقيقي.
Link to this sectionالواقع المعزز واكتشاف الكائنات في الحياة اليومية#
في المستودعات المزدحمة ومساحات البيع بالتجزئة الكبيرة، غالباً ما يحتاج العمال إلى إدارة العديد من المهام في نفس الوقت. يساعد الواقع المعزز (AR) من خلال وضع إرشادات رقمية مباشرة في العالم الحقيقي. عند إقرانها باكتشاف الكائنات، يمكن لأنظمة الواقع المعزز تحديد العناصر وتتبع مكان وجودها وعرض معلومات مفيدة في الوقت الفعلي. هذا يجعل المهام اليومية أسهل وأسرع وأكثر سهولة للأشخاص الذين يستخدمونها.
أحد الاتجاهات المتزايدة في هذا المجال هو استخدام رؤية الذكاء الاصطناعي لتحويل الأجهزة اليومية إلى مساعدين أذكياء يمكنهم فهم محيطهم. مع استمرار اندماج الواقع المعزز واكتشاف الكائنات، بدأت أماكن العمل في تبني أدوات غامرة تدعم التوجيه بدون استخدام اليدين وسير عمل أكثر كفاءة.
مثال جيد هو نظارات الواقع المعزز التي تعمل بالذكاء الاصطناعي من أمازون، والتي يتم تطويرها واختبارها حالياً. تستخدم هذه النظارات اكتشاف الكائنات وتصنيف الصور للتعرف على الطرود، وتوجيه العمال على المسار الصحيح، وتسجيل إثبات التسليم. هذا يخلق تجربة أكثر أماناً وبدون استخدام اليدين تساعد العمال على البقاء مركزين وفعالين طوال اليوم.
Link to this sectionالأجهزة الذكية القائمة على إنترنت الأشياء لأنظمة الرؤية في الوقت الفعلي#
أصبحت الأجهزة الذكية أنظمة ذكية يمكنها رؤية وفهم والتفاعل مع محيطها. يقود إنترنت الأشياء (IoT) هذا التحول من خلال ربط الكاميرات وأجهزة الاستشعار والآلات والتطبيقات الذكية في شبكات تجمع وتجري معالجة فورية للبيانات.
عندما يعمل إنترنت الأشياء جنباً إلى جنب مع اكتشاف الكائنات والحوسبة الطرفية، يمكن للأجهزة تفسير المعلومات المرئية، ورصد الحالات الشاذة، والاستجابة فوراً دون تدخل بشري. هذا يخلق أنظمة قابلة للتكيف وفعالة تدعم المنازل الذكية والصناعات والمدن بأكملها.
على سبيل المثال، أظهرت دراسة حديثة كيف يستخدم نظام حماية الحياة البرية القائم على إنترنت الأشياء نموذج YOLOv8 لاكتشاف الحيوانات التي تقترب من الأراضي الزراعية. بمجرد اكتشافها، يستخدم النظام اتخاذ القرار المدعوم بالذكاء الاصطناعي لإطلاق رادع خفيف مثل الأضواء أو الأصوات، لتوجيه الحيوانات بعيداً بأمان. يساعد هذا في منع تلف المحاصيل مع دعم التعايش السلمي مع الحياة البرية المحلية، مما يوضح كيف يمكن لإنترنت الأشياء والرؤية الحاسوبية جعل الزراعة أكثر استدامة.
Link to this sectionاتجاهات أخرى مثيرة للاهتمام في رؤية الذكاء الاصطناعي#
بصرف النظر عن اتجاهات اكتشاف الكائنات السبعة هذه، إليك بعض التطورات الجديرة بالملاحظة التي تشكل مستقبل رؤية الذكاء الاصطناعي:
- البحث في التعلم ذاتي الإشراف: تتيح الطرق الجديدة القائمة على التعلم العميق للنماذج تعلم ميزات مرئية مفيدة من مجموعات كبيرة من الصور غير المصنفة، مما يساعد أنظمة اكتشاف الكائنات على التحسن دون الاعتماد بشكل كبير على التعليقات التوضيحية اليدوية.
- صعود اكتشاف الكائنات القائم على المحولات (Transformers): أصبحت المحولات أكثر شيوعاً لأنها تلتقط العلاقات بعيدة المدى داخل الصور، مما يمنح النماذج فهماً سياقياً أفضل ويحسن دقة الاكتشاف.
- تكامل كشف الضوء وتحديد المدى (LiDAR) لإدراك ثلاثي الأبعاد أكثر ثراءً: يوفر الجمع بين LiDAR واكتشاف الكائنات القائم على الكاميرا معلومات دقيقة عن العمق، مما يعزز الإدراك ثلاثي الأبعاد لتطبيقات مثل الملاحة والروبوتات والقيادة الذاتية.
Link to this sectionأبرز النقاط#
لقد نما اكتشاف الكائنات إلى أبعد من التعرف الأساسي على الصور ويستخدم الآن لتشغيل أنظمة ذكية قادرة على اتخاذ القرارات في الوقت الفعلي. وبالنظر إلى المستقبل، من المرجح أن تحقق النماذج المستقبلية دقة أعلى وفهماً أعمق للسياق، مما يتيح لرؤية الذكاء الاصطناعي أن تصبح أكثر موثوقية وتعدداً في الاستخدام عبر الصناعات. ومع استمرار تقدم هذه التقنيات، فإنها ستشكل جيلاً جديداً من أنظمة الرؤية الحاسوبية الأكثر ذكاءً وقدرة على التكيف.
هل تريد معرفة المزيد؟ انضم إلى مجتمعنا واستكشف مستودع GitHub للتواصل مع الآخرين في مجال الذكاء الاصطناعي. تفضل بزيارة صفحات الحلول الخاصة بنا حول الذكاء الاصطناعي في الروبوتات والرؤية الحاسوبية للزراعة، واستكشف خيارات الترخيص الخاصة بنا للبدء في استخدام رؤية الذكاء الاصطناعي اليوم.






