الدليل النهائي لأدوات تقدير الوضع
تعرف على كيفية استخدام أدوات تقدير الوضع لاكتشاف النقاط الرئيسية للجسم في الصور والفيديو، وتقدير الأوضاع ثنائية وثلاثية الأبعاد، وتشغيل تطبيقات الرؤية الحاسوبية المختلفة.
كثيرًا ما نقرأ الحركة كبشر بشكل غريزي. عندما ينحني شخص ما للأمام، أو يدير رأسه، أو يرفع ذراعه، يمكنك استنتاج ما يفعله على الفور. إنها مهارة هادئة، تكاد تكون لاواعية، تشكل الطريقة التي نتفاعل بها مع الناس ونستكشف العالم.
مع تزايد دور التكنولوجيا في حياتنا اليومية، فمن الطبيعي أن نرغب في أن تفهم أجهزتنا الحركة بسلاسة كما نفهمها نحن. لقد جعلت التطورات الأخيرة في الذكاء الاصطناعي، وخاصة تلك القائمة على التعلم العميق، هذا الأمر ممكنًا. وبشكل خاص، يساعد الرؤية الحاسوبية الآلات على استخلاص المعنى من الصور ومقاطع الفيديو، وهو ما يدفع هذا التقدم قدمًا.
على سبيل المثال، يعد تقدير وضعية الجسم مهمة شائعة في الرؤية الحاسوبية تتنبأ بمواقع نقاط مفصلية محددة مسبقًا للجسم (مثل الكتفين والمرفقين والوركين والركبتين) في صورة أو إطار فيديو. يمكن ربط هذه النقاط باستخدام تعريف هيكلي ثابت لتكوين تمثيل مبسط لوضعية الجسم.
تدعم نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 ونموذج Ultralytics YOLO26 المرتقب مهامًا مثل تقدير وضعية الجسم، ويمكن استخدامها لتشغيل تطبيقات الوقت الفعلي، بما في ذلك تقديم ملاحظات حول الأداء في اللياقة البدنية والرياضة، ومراقبة السلامة، وتجارب الواقع المعزز التفاعلية.

الشكل 1. نظرة على استخدام Ultralytics YOLO11 لتقدير وضعية الجسم (المصدر)
في هذه المقالة، سنتعمق في أدوات تقدير وضعية الجسم ونستعرض كيفية عملها، ومجالات استخدامها، وبعض أفضل النماذج والمكتبات المتاحة اليوم. لنبدأ!
Link to this sectionما هو تقدير الوضعية؟#
تقدير وضعية الجسم هو تقنية رؤية حاسوبية تساعد النظام على فهم كيفية تموضع شخص أو كائن في صورة أو فيديو. وبدلاً من تحليل كل بكسل على حدة، فإنه يتنبأ بمجموعة من المعالم المتسقة، مثل الرأس والكتفين والمرفقين والوركين والركبتين والكاحلين.
تُخرج معظم النماذج إحداثيات هذه النقاط المفصلية مع درجة تعكس احتمالية صحة كل تنبؤ. يمكن بعد ذلك ربط هذه النقاط باستخدام تخطيط هيكلي محدد مسبقًا لتكوين تمثيل بسيط لوضعية الجسم.
عند تطبيق ذلك إطارًا تلو الآخر في مقاطع الفيديو، يمكن ربط النقاط الناتجة بمرور الوقت لتقدير الحركة. وهذا يتيح تطبيقات مثل فحص الأداء، وتحليل الحركة، والتفاعل القائم على الإيماءات.

الشكل 2. مثال على تقدير وضعية الجسم (المصدر)
Link to this sectionالحاجة إلى أدوات تقدير وضعية الجسم#
تحمل حركة الإنسان الكثير من المعلومات. فالطريقة التي ينحني بها شخص ما، أو يمد يده، أو يغير توزيع وزنه يمكن أن تكشف عن النية، أو الجهد، أو التعب، أو حتى خطر الإصابة. وحتى وقت قريب، كان التقاط هذا المستوى من التفاصيل يتطلب عادةً أجهزة استشعار متخصصة، أو بدلات التقاط الحركة، أو بيئات مختبرية خاضعة للرقابة.
يغير تقدير وضعية الجسم هذا الواقع. فاستخراج المعالم الرئيسية للجسم من الصور ومقاطع الفيديو العادية يسمح لأجهزة الكمبيوتر بتحليل الحركة باستخدام كاميرات قياسية. وهذا يجعل تحليل الحركة أكثر سهولة وقابلية للتوسع وعملية في الاستخدام في البيئات الواقعية.
إليك بعض الطرق التي يمكن أن يحدث بها تقدير وضعية الجسم تأثيرًا:
- أماكن عمل أكثر أمانًا: يمكن استخدام الأنظمة التي تعتمد على الرؤية لاكتشاف الوضعيات الخطرة، أو الإجهاد المتكرر، أو تقنيات الرفع غير الآمنة قبل وقوع الإصابات.
- تحسين التدريب الرياضي واللياقة البدنية: يمكن لحلول الذكاء الاصطناعي البصري تقييم الأداء والتوازن والتقنية في الوقت الفعلي، مما يمنح المستخدمين ملاحظات فورية دون الحاجة إلى أجهزة قابلة للارتداء.
- الرعاية الصحية وإعادة التأهيل: يمكن للأطباء تتبع تقدم التعافي، والوضعية، ونطاق الحركة عن بُعد باستخدام تسجيلات فيديو بسيطة.
- تجارب تفاعلية: يجعل تقدير وضعية الجسم من الأسهل على الصور الرمزية الرقمية والبيئات الغامرة متابعة الحركة البشرية وعكسها بدقة.
Link to this sectionتطور خوارزميات تقدير وضعية الجسم#
فكرة تقدير وضعيات الجسم موجودة منذ سنوات عديدة. استخدمت المناهج المبكرة نماذج هندسية بسيطة وقواعد صُممت يدويًا، وكانت تعمل عادةً فقط في ظروف محكومة.
على سبيل المثال، قد يعمل النظام بشكل جيد عندما يقف الشخص ثابتًا في وضعية محددة، لكنه يفشل عندما يبدأ في المشي أو الالتفات أو التفاعل مع أشياء في مشاهد واقعية. غالبًا ما كانت هذه الأساليب تواجه صعوبة مع الحركة الطبيعية، وتغير زوايا الكاميرا، والخلفيات المزدحمة، والانسداد الجزئي.
يعتمد تقدير وضعية الجسم الحديث على التعلم العميق للتعامل مع هذه التحديات. فمن خلال تدريب الشبكات العصبية التلافيفية على مجموعات بيانات كبيرة مصنفة، تتعلم النماذج أنماطًا بصرية تساعدها على اكتشاف النقاط المفصلية بشكل أكثر موثوقية عبر وضعيات وأشخاص وبيئات مختلفة.
مع توفر المزيد من الأمثلة، يحسن النموذج تنبؤاته ويصبح أفضل في التعميم على مشاهد جديدة. وبفضل هذا التقدم، أصبح تقدير وضعية الجسم يدعم الآن مجموعة واسعة من حالات الاستخدام العملية، بما في ذلك مراقبة مكان العمل وبيئة العمل، وتحليلات الرياضة، حيث يدرس المدربون والمحللون كيفية تحرك الرياضيين.
Link to this sectionأنواع تقنيات تقدير وضعية الجسم#
يأتي تقدير وضعية الجسم في عدة أشكال مختلفة، اعتمادًا على الإعداد وما تحتاج إلى قياسه. إليك الأنواع الرئيسية التي ستصادفها:
- تقدير وضعية الجسم ثنائي الأبعاد (2D): يكتشف هذا النهج النقاط المفصلية للجسم في صورة ثنائية الأبعاد أو إطار فيديو. يعمل بشكل جيد مع الكاميرات القياسية ويتميز بالكفاءة الحسابية، مما يجعله مناسبًا لمهام مثل تتبع الحركة الأساسي، وتحليل الوضعية، وملاحظات الأداء في الوقت الفعلي.
- تقدير وضعية الجسم ثلاثي الأبعاد (3D): من خلال تقدير العمق بالإضافة إلى إحداثيات الصورة، يوفر تقدير وضعية الجسم ثلاثي الأبعاد فهمًا مكانيًا لحركة الجسم. وهذا مفيد بشكل خاص عندما تكون الحركة للأمام وللخلف مهمة، كما هو الحال في تحليل الرياضة، وإعادة التأهيل، والميكانيكا الحيوية، والرسوم المتحركة. وتحديدًا، يلتقط تقدير وضعية الإنسان ثلاثي الأبعاد مواقع المفاصل والحركة في فضاء ثلاثي الأبعاد، مما يقلل من الغموض الذي قد يحدث مع الإسقاطات ثنائية الأبعاد.
- تقدير وضعية الجسم لشخص واحد: صُممت هذه الأنظمة لتتبع فرد واحد في كل مرة. وتميل إلى تقديم أفضل أداء في الإعدادات المحكومة أو شبه المحكومة حيث يكون الشخص مرئيًا بوضوح، مثل تطبيقات التمارين الموجهة، ومكالمات الفيديو، وإعدادات تحليل الحركة.
- تقدير وضعية الجسم لعدة أشخاص: صُمم هذا النهج للمشاهد التي تضم عدة أشخاص، حيث يكتشف ويتتبع وضعيات العديد من الأفراد في وقت واحد. وهو مفيد بشكل خاص في البيئات المزدحمة مثل أماكن العمل، وصالات الألعاب الرياضية، والأماكن العامة، والأنشطة الجماعية، حيث قد يتداخل الأشخاص أو يحجبون بعضهم البعض.
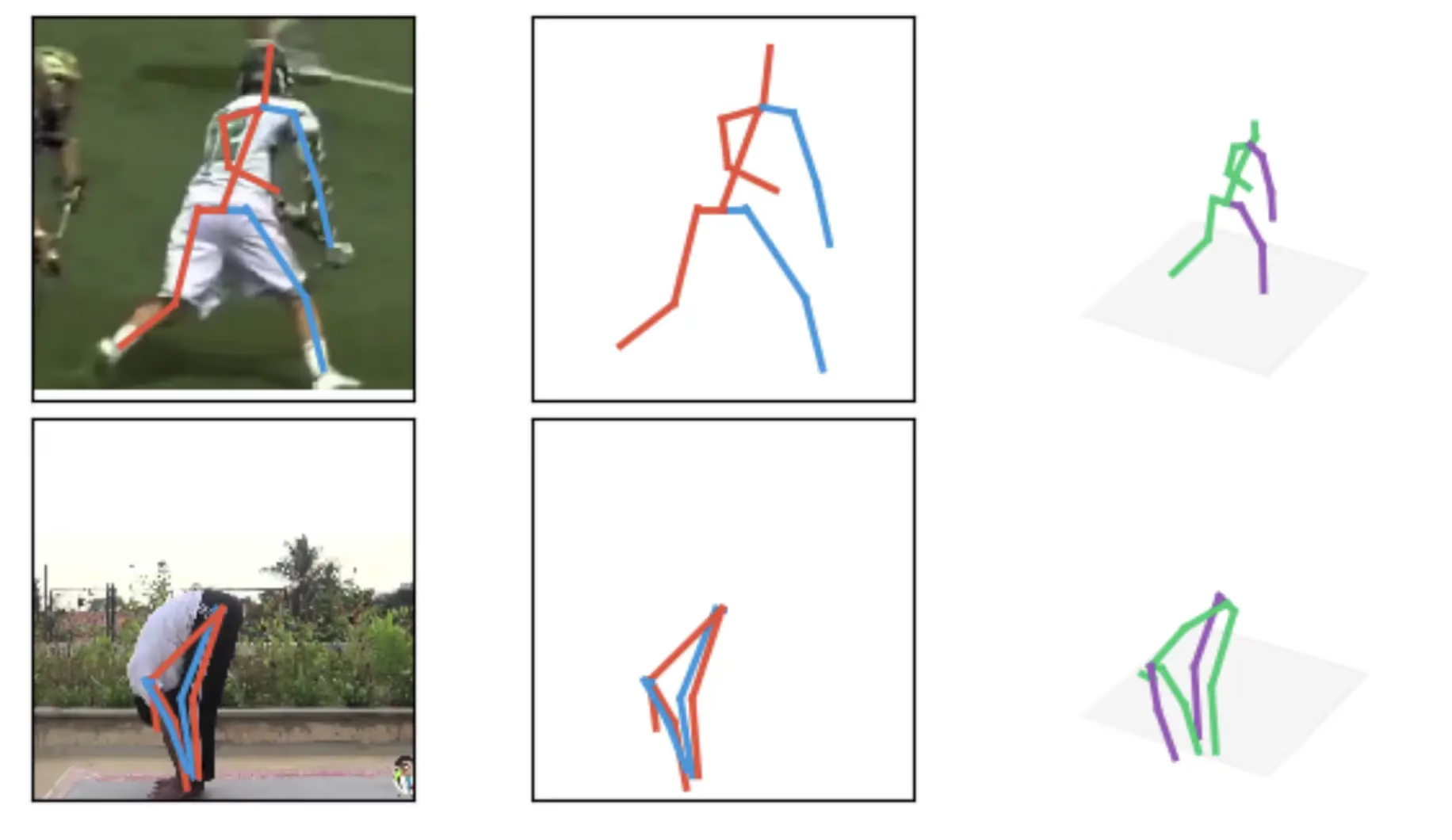
الشكل 3. فهم حركة الإنسان في الفضاء ثلاثي الأبعاد مقابل فضاء الصورة ثنائي الأبعاد (المصدر)
Link to this sectionفهم كيفية عمل نماذج تقدير وضعية الجسم#
يمكن تطبيق تقدير وضعية الجسم على العديد من أنواع الكائنات، ولكن لتبسيط الأمور، دعونا نركز على تقدير وضعية الإنسان.
تُدرب معظم أنظمة تقدير وضعية الإنسان على مجموعات بيانات مصنفة حيث يتم تحديد أجزاء الجسم الرئيسية عبر مجموعات كبيرة من الصور وإطارات الفيديو. وباستخدام هذه الأمثلة، يتعلم النموذج الأنماط البصرية المرتبطة بمعالم جسم الإنسان مثل الكتفين والمرفقين والوركين والركبتين والكاحلين، حتى يتمكن من التنبؤ بالنقاط المفصلية بدقة في مشاهد جديدة.
جانب رئيسي آخر هو هندسة استنتاج النموذج، والتي تحدد كيفية اكتشافه للنقاط المفصلية وتجميعها في وضعيات كاملة. تكتشف بعض الأنظمة كل شخص أولاً ثم تقدر النقاط المفصلية داخل منطقة كل شخص، بينما تكتشف أنظمة أخرى النقاط المفصلية عبر الصورة بأكملها ثم تجمعها في أفراد. يمكن للتصاميم الأحدث أحادية المرحلة التنبؤ بالوضعيات في تمريرة واحدة، مما يوازن بين السرعة والدقة للاستخدام في الوقت الفعلي.
بعد ذلك، دعونا نمر على مناهج تقدير وضعية الجسم المختلفة بالتفصيل.
Link to this sectionتقدير وضعية الجسم من القاعدة إلى القمة (Bottom-up)#
في نهج القاعدة إلى القمة، ينظر النموذج إلى الصورة بأكملها ويجد نقاط الجسم المفصلية أولاً، مثل الرأس والكتفين والمرفقين والوركين والركبتين والكاحلين. في هذه المرحلة، لا يحاول فصل الأشخاص. إنه ببساطة يكتشف جميع النقاط المفصلية أو مفاصل الجسم المحددة بواسطة هيكل الوضعية عبر المشهد.
بعد ذلك، يقوم النظام بخطوة ثانية لربط النقاط. حيث يربط النقاط المفصلية التي تنتمي لبعضها البعض ويجمعها في هياكل عظمية كاملة، هيكل واحد لكل شخص. وبما أنه لا يحتاج إلى اكتشاف كل شخص أولاً، غالبًا ما تعمل أساليب القاعدة إلى القمة بشكل جيد في المشاهد المزدحمة حيث يتداخل الأشخاص، أو يظهرون بأحجام مختلفة، أو يكونون مخفيين جزئيًا.
Link to this sectionتقدير وضعية الجسم من القمة إلى القاعدة (Top-down)#
على النقيض من ذلك، تبدأ أنظمة القمة إلى القاعدة باكتشاف كل شخص في الصورة أولاً. فهي تضع مربع إحاطة حول كل فرد وتتعامل مع كل مربع كمنطقة خاصة به للتحليل.
بمجرد عزل الشخص، يتنبأ النموذج بنقاط الجسم المفصلية داخل تلك المنطقة. غالبًا ما ينتج عن هذا الإعداد خطوة بخطوة نتائج دقيقة للغاية، خاصة عندما يكون هناك عدد قليل من الأشخاص في المشهد، ويكون كل شخص مرئيًا بوضوح.
Link to this sectionتقدير وضعية الجسم أحادي المرحلة أو الهجين#
تتنبأ النماذج أحادية المرحلة، والتي تُسمى أحيانًا الهجينة، بالوضعيات في تمريرة واحدة. بدلاً من تشغيل اكتشاف الشخص أولاً ثم تقدير النقاط المفصلية ثانيًا، فإنها تُخرج موقع الشخص والنقاط المفصلية للجسم في نفس الوقت.
نظرًا لأن كل شيء يحدث في وحدة واحدة، غالبًا ما تكون هذه النماذج أسرع وأكثر كفاءة، مما يجعلها مناسبة تمامًا لاستخدامات الوقت الفعلي مثل تتبع الحركة المباشر والتقاط الحركة. تم بناء نماذج مثل Ultralytics YOLO11 حول هذه الفكرة، بهدف الموازنة بين السرعة وتنبؤات النقاط المفصلية الموثوقة.
Link to this sectionتدريب وتقييم نماذج تقدير وضعية الجسم#
بغض النظر عن النهج المستخدم، لا يزال نموذج تقدير وضعية الجسم بحاجة إلى التدريب والاختبار بعناية قبل أن يصبح موثوقًا في العالم الحقيقي. وهو يتعلم عادةً من مجموعات كبيرة من الصور (وأحيانًا الفيديو) حيث يتم تحديد نقاط الجسم المفصلية، مما يساعده على التعامل مع وضعيات وزوايا كاميرا وبيئات مختلفة.
تشمل بعض مجموعات بيانات تقدير وضعية الجسم المعروفة COCO Keypoints، وMPII Human Pose، وCrowdPose، وOCHuman. عندما لا تعكس مجموعات البيانات هذه الظروف التي سيواجهها النموذج في النشر، يقوم المهندسون غالبًا بجمع وتصنيف صور إضافية من بيئة الهدف، مثل أرضية المصنع، أو صالة الألعاب الرياضية، أو العيادة.

الشكل 4. تقدير وضعيات متنوعة باستخدام الرؤية الحاسوبية (المصدر)
بعد التدريب، يتم تقييم أداء النموذج على معايير قياسية لقياس الدقة والمتانة وتوجيه المزيد من الضبط للاستخدام في العالم الحقيقي. غالبًا ما يتم الإبلاغ عن النتائج باستخدام متوسط الدقة، والذي يُشار إليه عادةً بـ mAP، والذي يلخص الأداء عبر عتبات ثقة مختلفة من خلال مقارنة الوضعيات المتنبأ بها مع الحقيقة الأرضية المصنفة.
في العديد من معايير تقدير الوضعية، تتم مطابقة وضعية متنبأ بها مع وضعية الحقيقة الأرضية باستخدام تشابه نقاط الجسم (OKS). يقيس OKS مدى قرب النقاط المفصلية المتنبأ بها من النقاط المفصلية المصنفة، مع مراعاة عوامل مثل مقياس الشخص وصعوبة التوطين النموذجية لكل نقطة مفصلية.
تُخرج نماذج الوضعية أيضًا درجات ثقة للأشخاص المكتشفين وللنقاط المفصلية الفردية. تعكس هذه الدرجات ثقة النموذج وتُستخدم لتصنيف وتصفية التنبؤات، وهو أمر مهم بشكل خاص في الظروف الصعبة مثل الانسداد، أو ضبابية الحركة، أو زوايا الكاميرا غير المعتادة.
Link to this sectionأدوات ومكتبات تقدير وضعية الجسم الشائعة#
تتوفر اليوم العديد من أدوات تقدير وضعية الجسم، حيث توازن كل منها بين السرعة والدقة وسهولة الاستخدام. إليك بعض الأدوات والمكتبات الأكثر استخدامًا:
- Ultralytics YOLO11: تم تطويره كنموذج رؤية اصطناعي مفتوح المصدر متطور، ويعتمد YOLO11 على نماذج سابقة مثل Ultralytics YOLOv8. وهو يحسن السرعة والدقة والكفاءة الإجمالية مع دعم مهام الرؤية الحاسوبية المختلفة، بما في ذلك تقدير وضعية الجسم. مع أداء قوي عبر الأنظمة الأساسية، من أجهزة الكمبيوتر المحمولة إلى أجهزة الحافة، يعد YOLO11 خيارًا رائعًا للعديد من عمليات النشر في العالم الحقيقي.
- Ultralytics YOLO26: تم تصميم هذا النموذج المرتقب من الجيل التالي ليكون أخف وأصغر وأسرع، مع الحفاظ على دقة قوية. وهو مصمم للاستخدام في الوقت الفعلي والنشر الأسهل، ويدعم مهام مثل اكتشاف الكائنات، وتجزئة المثيلات، وتقدير وضعية الجسم عبر أحجام نماذج مناسبة لكل شيء من أجهزة الحافة إلى الأنظمة الأكبر.
- MediaPipe: هو إطار عمل عبر الأنظمة الأساسية لبناء خطوط أنابيب الرؤية والتعلم الآلي. إنه خفيف الوزن ويعمل بكفاءة على الأجهزة المحمولة والأجهزة اللوحية وتطبيقات الويب، ويتضمن حلولًا ونماذج جاهزة للاستخدام لتقدير وضعية الجسم بالكامل، ومعالم الوجه، وتتبع اليد.
- OpenPose: هذا النظام مفتوح المصدر لتقدير وضعية الجسم من البداية إلى النهاية معروف على نطاق واسع باكتشاف النقاط المفصلية لعدة أشخاص. يمكنه تقدير نقاط الجسم واليد والوجه معًا، ويُستخدم بشكل شائع في الأبحاث والرسوم المتحركة وتحليل الحركة.
- MMPose: هو مجموعة أدوات تقدير وضعية الجسم القائمة على PyTorch من نظام OpenMMLab البيئي. يوفر العديد من عمليات تنفيذ النماذج، وأدوات التدريب، وخيارات التكوين، مما يجعله مفيدًا للتجريب والتخصيص العميق.
- HRNet وAlphaPose: هذه نماذج أقدم لتقدير وضعية الجسم لا تزال تُستخدم في الأبحاث اليوم. HRNet هي هندسة نموذج وضعية تحافظ على ميزات الصورة عالية الدقة عبر الشبكة، مما يساعدها على تحديد النقاط المفصلية بدقة. AlphaPose هو نظام تقدير وضعية الجسم لعدة أشخاص يُستخدم على نطاق واسع، ويُستخدم عادةً عندما تكون الدقة القوية مطلوبة في المشاهد المزدحمة أو المعقدة.
Link to this sectionتطبيقات العالم الحقيقي لتحليل وتقدير وضعية الجسم#
يُستخدم تقدير وضعية الجسم بشكل متزايد لتحويل مقاطع الفيديو العادية إلى رؤى مفيدة حول الحركة. من خلال تتبع نقاط الجسم المفصلية إطارًا تلو الآخر، يمكن لهذه الأنظمة استنتاج الوضعية والحركة والسلوك البدني من تغذيات الكاميرا، مما يجعل هذه التكنولوجيا عملية في العديد من بيئات العالم الحقيقي.
على سبيل المثال، في الرعاية الصحية وإعادة التأهيل، يمكن أن يساعد تتبع وضعية الجسم الأطباء على رؤية وقياس كيفية تحرك المريض أثناء العلاج والتعافي. ومن خلال استخراج معالم الجسم من تسجيلات الفيديو العادية، يمكن استخدامه لتقييم الوضعية ونطاق الحركة وأنماط الحركة العامة بمرور الوقت. يمكن لهذه القياسات دعم وتحسين التقييمات السريرية التقليدية، وفي بعض الحالات، تسهيل تتبع التقدم دون الحاجة إلى أجهزة استشعار قابلة للارتداء أو معدات متخصصة.
وبالمثل، في الرياضة والبث، يمكن لتقدير وضعية الجسم تحليل كيفية تحرك الرياضيين مباشرة من تغذيات الفيديو. ومن الأمثلة المثيرة للاهتمام نظام Hawk-Eye، وهو نظام تتبع يعتمد على الكاميرا ويُستخدم في الرياضات الاحترافية للتحكيم ورسوميات البث. كما يوفر تتبعًا هيكليًا من خلال تقدير النقاط المفصلية لجسم الرياضي من زوايا الكاميرا.
Link to this sectionاختيار أداة تقدير وضعية الجسم المناسبة#
يبدأ اختيار أداة تقدير وضعية الجسم المناسبة بفهم احتياجات مشروع الرؤية الحاسوبية الخاص بك. تعطي بعض التطبيقات الأولوية لسرعة الوقت الفعلي، بينما تتطلب تطبيقات أخرى دقة وتفاصيل أعلى.
يُحدث جهاز النشر المستهدف فرقًا أيضًا. تتطلب تطبيقات الأجهزة المحمولة وأجهزة الحافة عادةً نماذج خفيفة الوزن وفعالة، بينما تكون النماذج الأكبر غالبًا مناسبة بشكل أفضل للخوادم أو بيئات السحابة.
بالإضافة إلى ذلك، يمكن أن تلعب سهولة الاستخدام دورًا. فالتوثيق الجيد، والنشر السلس، ودعم التدريب المخصص يمكن أن يبسط مشروعك.
ببساطة، تتفوق الأدوات المختلفة في مجالات مختلفة. على سبيل المثال، توفر نماذج Ultralytics YOLO توازنًا عمليًا بين السرعة والدقة وسهولة النشر للعديد من تطبيقات تقدير وضعية الجسم في العالم الحقيقي.
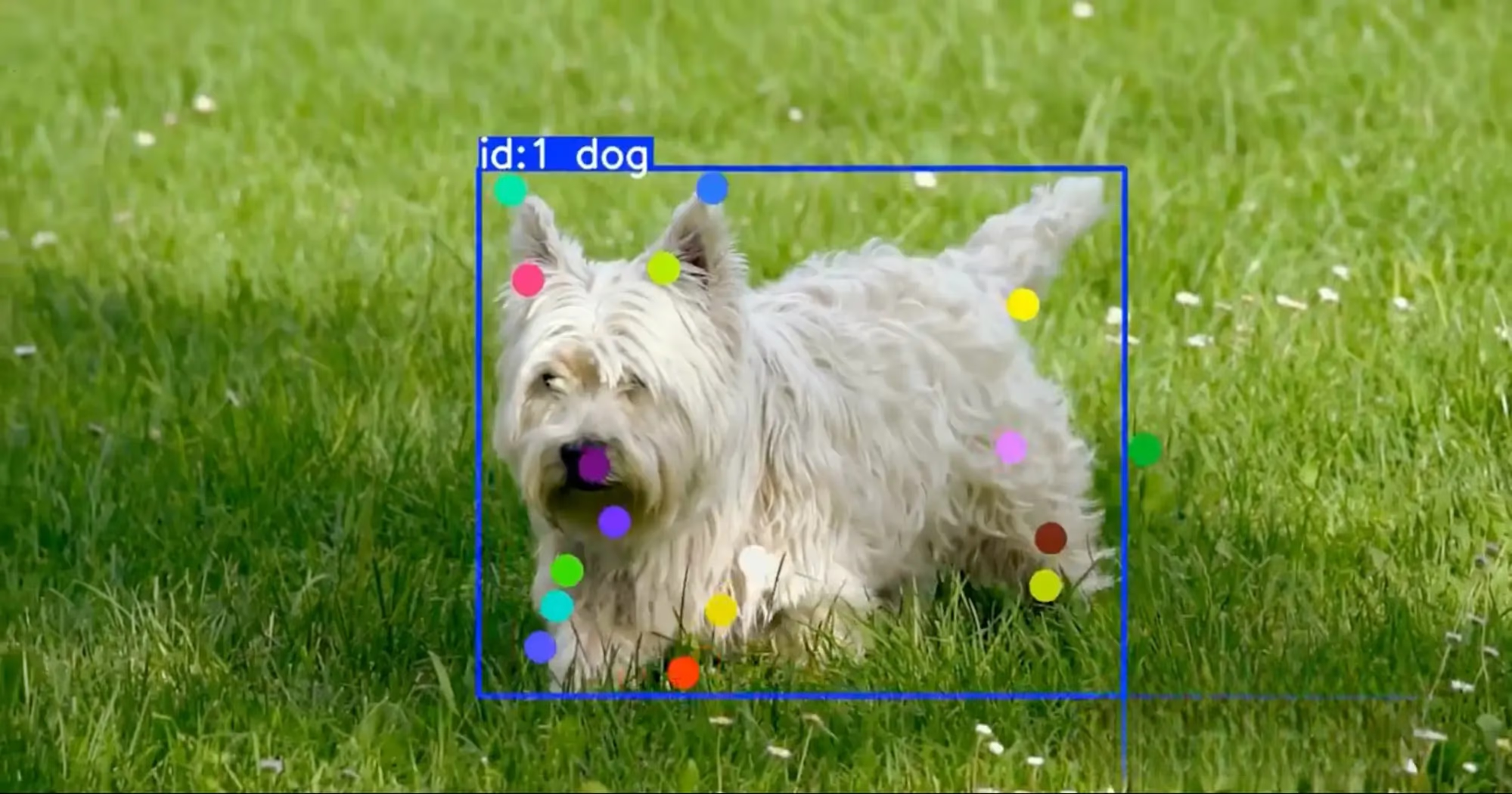
الشكل 5. تقدير وضعية الحيوانات باستخدام Ultralytics YOLO11 (المصدر)
Link to this sectionأبرز النقاط#
يساعد تقدير وضعية الجسم أجهزة الكمبيوتر على فهم الحركة البشرية من خلال اكتشاف النقاط المفصلية للجسم في الصور ومقاطع الفيديو. تجعل نماذج مثل YOLO11 وYOLO26 من الأسهل بناء تطبيقات الوقت الفعلي لمجالات مثل الرياضة، والرعاية الصحية، وسلامة مكان العمل، والتجارب التفاعلية. ومع استمرار النماذج في أن تصبح أسرع وأكثر دقة، من المرجح أن يصبح تقدير وضعية الجسم ميزة شائعة في العديد من أنظمة الذكاء الاصطناعي البصري.
هل تريد معرفة المزيد عن الذكاء الاصطناعي؟ تحقق من مجتمعنا ومستودع GitHub. استكشف صفحات الحلول الخاصة بنا للتعرف على الذكاء الاصطناعي في الروبوتات والرؤية الحاسوبية في التصنيع. اكتشف خيارات الترخيص لدينا وابدأ في البناء باستخدام الرؤية الحاسوبية اليوم!






