اكتشاف حركة المرور في الفيديو ليلاً: نظرة على سبب أهمية الدقة
من ضعف الرؤية إلى الوهج، تعرَّف على ما يجعل دقة اكتشاف حركة المرور في الفيديو ليلاً تحدياً، وكيف يعمل الرؤية الحاسوبية على تحسين السلامة والانسيابية.

تبدو الطرق مختلفة في الظلام، ليس فقط للسائقين، ولكن أيضاً للأنظمة المسؤولة عن الحفاظ على سلامتهم. فضعف الرؤية، ووهج المصابيح الأمامية، والانعكاسات سريعة الحركة يمكن أن تجعل كشف المركبات ليلاً أكثر صعوبة.
تعتمد الطرق التقليدية، مثل المراقبة اليدوية أو الكاميرات القائمة على الحركة، بشكل أساسي على التقدير البشري وإشارات الحركة البسيطة. وهذا يمكن أن يكون غير موثوق به في ظروف الإضاءة المنخفضة أو ظروف حركة المرور المعقدة. قد تخطئ هذه الطرق في تحديد المركبات أو المشاة، مما يؤدي إلى اكتشافات خاطئة أو تفويت للملاحظات.

الشكل 1. مثال لطريق مضاء بشكل سيئ ليلاً (المصدر)
يمكن للذكاء الاصطناعي، والتعلم العميق، والرؤية الحاسوبية سد الفجوة من خلال أتمتة كشف المركبات والتعرف عليها. وبشكل خاص، الرؤية الحاسوبية هي فرع من فروع الذكاء الاصطناعي يسمح للآلات برؤية البيانات المرئية وتفسيرها. عندما يتعلق الأمر بكشف حركة المرور في الفيديو ليلاً، يمكن لنماذج الرؤية بالذكاء الاصطناعي تجاوز حدود السطوع أو الحركة، حيث تتعلم التعرف على الأنماط المعقدة التي تحسن الدقة.
على سبيل المثال، تشتهر نماذج الرؤية الحاسوبية مثل Ultralytics YOLO26 وUltralytics YOLO11 بسرعتها ودقتها. فهي قادرة على معالجة بيانات الفيديو والصور في الوقت الفعلي، وتكتشف وتصنف كائنات متعددة داخل الإطار وتتتبعها عبر التسلسلات.
تتحقق هذه القدرات من خلال مهام رؤية متنوعة، مثل كشف الكائنات وتجزئة المثيلات، حتى عندما تجعل المصابيح الأمامية، أو الظلال، أو المركبات المتداخلة عملية الكشف صعبة. وهي تمكّن النموذج من تحديد الكائنات وتصنيفها والتمييز بينها.
في هذه المقالة، سوف نستكشف تحديات مراقبة حركة المرور ليلاً، ونرى كيف تعالجها الرؤية الحاسوبية، وأين يتم تطبيق الرؤية بالذكاء الاصطناعي في أنظمة مراقبة حركة المرور الواقعية. لنبدأ!
Link to this sectionالتحديات في الكشف الليلي#
قبل استكشاف كيفية حل الرؤية الحاسوبية لتحديات كشف حركة المرور ليلاً، دعونا نلقي نظرة على سبب صعوبة رصد المركبات بعد حلول الظلام. إليك بعض العوامل التي يجب مراعاتها:
-
ضعف الرؤية: الإضاءة المحدودة وظروف الإنارة السيئة تجعل من الصعب على الكاميرات التقاط لقطات حادة ومفصلة. مع انخفاض جودة الصورة، قد تندمج المركبات في الخلفية أو يتم التعرف عليها بشكل خاطئ تماماً.
-
ظروف الطقس: يمكن للأمطار، والضباب، والضباب الدخاني، أو حتى الغبار أن تزيد من تدهور جودة الفيديو. هذه الظروف تجعل من الصعب على أنظمة الكشف تمييز المركبات عن محيطها.
-
المصابيح الأمامية والخلفية: يمكن للأشعة الساطعة والانعكاسات أن تطغى على الكاميرات. وقد تخلق كشفاً خاطئاً للمركبات، حيث يتم الخلط بين نقاط الضوء والمركبات، مما يربك خوارزميات الكشف ويقلل الدقة.
-
تداخل المركبات: في ظروف حركة المرور المزدحمة، يمكن أن تكون المركبات مخفية جزئياً أو كلياً خلف مركبات أخرى. يؤدي التداخل إلى تعقيد تتبع المركبات، وعدّها، وتصنيفها، خاصة عندما يتداخل مستخدمو الطريق المتعددون ضمن إطار واحد.
Link to this sectionالحاجة إلى مجموعات بيانات ومقاييس مرجعية ليلية#
يتم تدريب نماذج الرؤية الحاسوبية باستخدام مجموعات كبيرة من الصور المعروفة باسم مجموعات البيانات. يتم تصنيف مجموعات البيانات هذه بعناية مع الكائنات التي تحتوي عليها، مثل السيارات والشاحنات والمشاة والدراجات، وتكون بمثابة الأساس للتدريب. ومن خلال دراسة هذه الأمثلة المصنفة، يتعلم النموذج التعرف على الأنماط، مما يمكنه من تحديد واكتشاف الكائنات في لقطات الفيديو الجديدة.

الشكل 2. استخدام الرؤية الحاسوبية لكشف المركبات والمشاة في حركة المرور (المصدر)
أثناء التدريب، يستخلص النموذج الميزات من البيانات ويستخدمها لتحسين دقة الكشف. تساعد هذه العملية في تقليل الاكتشافات الفائتة والإنذارات الكاذبة عندما يتعرض النموذج لمشاهد مرورية واقعية.
ومع ذلك، فإن بناء مجموعات البيانات أو مجموعات البيانات لظروف الليل أكثر صعوبة بكثير. رداءة جودة الفيديو تجعل التصنيف مستهلكاً للوقت وعرضة للأخطاء. أيضاً، يمكن أن يكون من الصعب التقاط أحداث نادرة ولكن مهمة، مثل الحوادث أو سلوك القيادة غير المعتاد، في ظروف الليل. وينتج عن ذلك عدد محدود من أمثلة التدريب التي يمكن للنماذج التعلم منها.
ولمعالجة هذه المشكلة، طور الباحثون مجموعات بيانات مرجعية متخصصة. مجموعة البيانات المرجعية هي أكثر من مجرد مجموعة من الصور. فهي تتضمن تصنيفات قياسية، وبروتوكولات تقييم، ومقاييس أداء مثل الدقة، والاستدعاء، ومتوسط دقة القياس (mAP). تجعل هذه المقاييس من الممكن اختبار ومقارنة الخوارزميات المختلفة تحت نفس الظروف، مما يضمن تقييماً عادلاً ومتسقاً.
على سبيل المثال، تحتوي مجموعة البيانات المرجعية ExDark على 7,363 صورة ذات إضاءة منخفضة عبر 12 فئة من الكائنات (دراجة، قارب، زجاجة، حافلة، سيارة، قطة، كرسي، كوب، كلب، دراجة نارية، أشخاص، طاولة). يتم تعليق كل صورة بصناديق إحاطة، وتُستخدم مجموعة البيانات على نطاق واسع في الأبحاث لتقييم كشف الكائنات وتصنيفها في ظروف الإنارة الضعيفة.
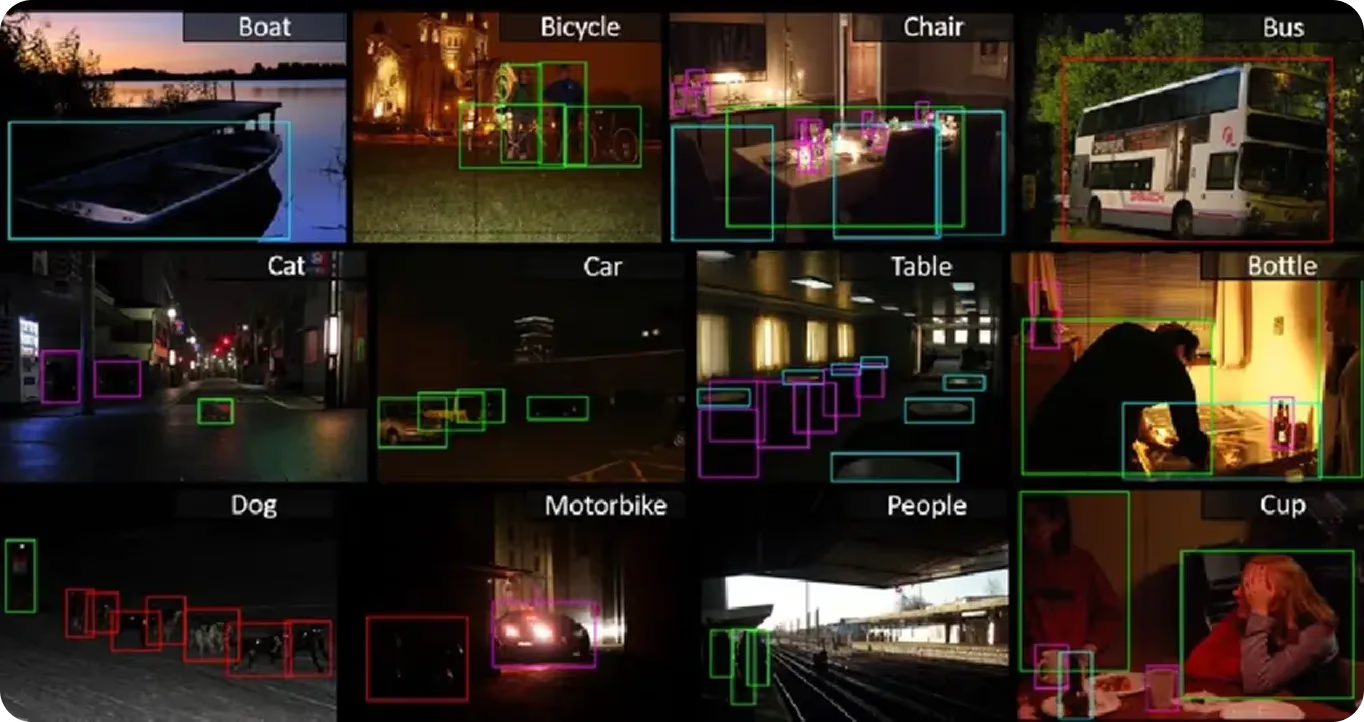
الشكل 3. لمحة عن مجموعة بيانات ExDark (المصدر)
وبالمثل، توفر مجموعة البيانات المرجعية NightOwls حوالي 115,000 صورة ليلية مع ما يقرب من 279,000 تعليق توضيحي للمشاة. وقد أصبحت مورداً رئيسياً لتقييم أنظمة كشف المشاة، التي تلعب دوراً حيوياً في السلامة على الطرق وأنظمة مساعدة السائق المتقدمة (ADAS).
Link to this sectionكيف تساعد الرؤية الحاسوبية في كشف حركة المرور في الفيديو ليلاً#
الآن بعد أن أصبح لدينا فهم أفضل للتحديات التي تنطوي عليها والحاجة إلى مجموعات البيانات، دعونا نلقي نظرة فاحصة على كيفية قيام الأنظمة القائمة على الرؤية بتفسير فيديوهات حركة المرور ليلاً.
تدعم نماذج مثل YOLO11 و YOLO26 مهام الرؤية الحاسوبية مثل كشف الكائنات، والتتبع، وتجزئة المثيلات، مما يجعل من الممكن تحليل حركة المرور حتى في ظروف الإضاءة المنخفضة. إليك نظرة عامة على مهام الرؤية بالذكاء الاصطناعي التي تدعمها هذه النماذج لتحليل حركة المرور ليلاً:
- كشف الكائنات: يمكن استخدام هذه المهمة لتحديد وتحديد مواقع المركبات، والمشاة، والدراجات، وغيرهم من مستخدمي الطريق في كل إطار، وعادة ما يتم ذلك عن طريق رسم صناديق إحاطة حولهم.
- تتبع الكائنات: يساعد في متابعة الكائنات المكتشفة عبر الإطارات، مما يسمح بالتعرف على نفس المركبة أو المشاة بمرور الوقت، وهو ما يجعل من الممكن تقدير سرعة المركبة ومراقبة تدفق حركة المرور.
- تجزئة المثيلات: يمكنها التمييز بين الكائنات الفردية حتى عندما تتداخل، مما يوفر تفاصيل على مستوى البكسل تحسن الدقة في الظروف الليلية المعقدة.
- تصنيف الصور: تخصص هذه المهمة صورة كاملة أو كائناً مكتشفاً لفئة محددة مسبقاً، مثل سيارة، أو حافلة، أو شاحنة، أو دراجة نارية.
- كشف صندوق الإحاطة الموجه (OBB): يلتقط الزاوية الدقيقة للكائن واتجاهه، مما يحسن الدقة عندما تظهر المركبات بشكل قطري أو في أوضاع غريبة في حركة المرور ليلاً.
Link to this sectionاستخدام نماذج Ultralytics YOLO للمراقبة الليلية#
ناقشنا تدريب النموذج، والحاجة إلى مجموعات البيانات، والمهام التي تدعمها نماذج مثل YOLO11 و YOLO26. ولكن لجمع كل ذلك معاً، هناك مفهوم آخر يجب استعراضه: كيف يتم تطبيق هذه النماذج فعلياً على المراقبة الليلية.
تتوفر نماذج Ultralytics YOLO كإصدارات مدربة مسبقاً، مما يعني أنها قد تم تدريبها بالفعل على مجموعات بيانات كبيرة للأغراض العامة، مثل مجموعة بيانات COCO، والتي تغطي العديد من الكائنات اليومية. وهذا يمنح النموذج قدرة أساسية قوية على اكتشاف وتصنيف الكائنات.
ومع ذلك، ونظراً لأن مجموعات البيانات هذه تحتوي على القليل جداً من الأمثلة في الإضاءة المنخفضة أو الليلية، فإن النماذج المدربة مسبقاً ليست جيدة في التعامل مع الوهج، أو الظلال، أو التباين الضعيف بفعالية. ولجعلها مؤثرة في كشف حركة المرور في الفيديو ليلاً، يجب ضبطها بدقة على مجموعات بيانات متخصصة تعكس ظروف الليل الواقعية.
يتضمن الضبط الدقيق أو التدريب المخصص تدريب النموذج على صور مصنفة إضافية تم التقاطها في ظروف الإضاءة المنخفضة، مثل المركبات تحت وهج المصابيح الأمامية، أو المشاة في ممرات المشاة، أو التقاطعات المزدحمة ليلاً، حتى يتعلم الميزات الفريدة للمشاهد الليلية.
بمجرد تدريبه بشكل مخصص، يمكن للنموذج دعم مهام مثل الكشف، أو التتبع، أو التجزئة، أو التصنيف بدقة أكبر بكثير في ظروف الإضاءة المنخفضة. وهذا يسمح لسلطات المرور بتطبيق مثل هذه النماذج لحالات استخدام عملية مثل عد المركبات، وتقدير السرعة، والتحكم التكيفي في الإشارات، ومنع الحوادث ليلاً.
Link to this sectionتطبيقات الرؤية بالذكاء الاصطناعي لكشف حركة المرور في الفيديو ليلاً#
بعد ذلك، دعونا نلقي نظرة على كيفية تبني الرؤية الحاسوبية في أنظمة المرور الليلية الواقعية.
Link to this sectionإشارات المرور الذكية يمكن أن تدعم تخطيط المدن الذكية#
تعد التقاطعات الحضرية من أصعب المناطق التي يجب إدارتها، خاصة في الليل عندما تنخفض الرؤية ويصبح تدفق حركة المرور أقل قابلية للتنبؤ. تعتمد الإشارات التقليدية على مؤقتات ثابتة لا يمكنها الاستجابة للتغيرات في الوقت الفعلي. تظهر الأبحاث أن هذا لا يضيع وقت السائقين فحسب، بل يؤدي أيضاً إلى استهلاك وقود وتأخيرات غير ضرورية.
هذا بالضبط هو المكان الذي يمكن أن تساعد فيه أنظمة الرؤية الحاسوبية في التغلب على هذا التحدي. يمكن لهذه الأنظمة مراقبة حركات المركبات واكتشاف عدد المركبات في الوقت الفعلي. ثم يتم إدخال البيانات في أنظمة التحكم التكيفي في حركة المرور. وهذا يمكّن الإشارات من التكيف بسرعة استجابةً لظروف الطريق الفعلية. لذا، إذا كان أحد المسارات مزدحماً بينما الآخر فارغ، يمكن تعديل توقيت الإشارة فوراً لتخفيف الاختناقات.
Link to this sectionمنع الحوادث#
القيادة ليلاً أكثر خطورة من النهار لأن ضعف الرؤية، والإضاءة غير المتساوية، والوهج تجعل من الصعب على السائقين تقدير المسافات. في الواقع، تظهر الدراسات أن معدل الحوادث المميتة لكل كيلومتر ليلاً يمكن أن يكون أعلى بثلاث مرات مما هو عليه في ضوء النهار.
تعمل طرق المراقبة التقليدية، مثل كاميرات المراقبة الثابتة، ودوريات الطرق، وأجهزة استشعار وجود المركبات، وأنظمة الإشارات ذات التوقيت الثابت، بشكل تفاعلي وقد تفشل في اكتشاف المواقف الخطرة مبكراً بما يكفي لمنع حدوثها.
يمكن لـ حلول الرؤية الحاسوبية معالجة هذا القلق من خلال تحليل تدفقات الفيديو المباشرة واكتشاف أنماط غير معتادة على الطريق أو الطريق السريع. باستخدام تتبع الكائنات، يمكن لهذه الأنظمة مراقبة سلوك المركبة في الوقت الفعلي وإطلاق تنبيهات عندما يبدو شيء ما غير طبيعي.
على سبيل المثال، إذا كانت مركبة متحركة تغير مساراتها، أو تتحرك بسرعة كبيرة في منطقة مزدحمة، أو تبطئ فجأة، يمكن للنظام وضع علامة عليها في الوقت الفعلي. وهذا يعني أن السلطات يمكنها الاستجابة بسرعة ومنع الحوادث قبل وقوعها.
Link to this sectionالقيادة الذاتية و ADAS#
بالنسبة للمركبات ذاتية القيادة و ADAS، تجلب القيادة الليلية تحدياتها الخاصة. ضعف الرؤية وأنماط حركة المرور غير المتوقعة تجعل من الصعب على أجهزة الاستشعار التقليدية العمل بشكل موثوق، مما يثير مخاوف تتعلق بالسلامة.
تعمل الرؤية الحاسوبية على تحسين هذه الأنظمة من خلال التعامل مع مهام مثل كشف الكائنات، وتتبع المسار، والتجزئة، مما يمكن المركبات من التعرف على المشاة، والسيارات الأخرى، والعوائق حتى في ظروف الإضاءة السيئة. عند دمجها مع الرادار أو LiDAR (كشف الضوء وتحديد المدى)، الذي يخطط للمحيط في 3D، تساعد طبقة الرؤية المضافة ADAS في توفير تحذيرات مبكرة وتمنح المركبات ذاتية القيادة الوعي الذي تحتاجه للتنقل بشكل أكثر أماناً ليلاً.

الشكل 4. لقطات مركبة تم التقاطها في ظروف النهار والليل (المصدر)
Link to this sectionتطبيق القانون وكشف المخالفات#
يعتبر السرعة الزائدة مسؤولة عن حالة واحدة من كل ثلاث وفيات مرورية في جميع أنحاء العالم، وتزداد المخاطر سوءاً في الليل. الظلام يجعل من الصعب على شرطة المرور ضبط المخالفات، حيث غالباً ما تتلاشى التفاصيل التي تكون واضحة في ضوء النهار بعد حلول الظلام.
ولهذا السبب غالباً ما تمر مخالفات مثل السرعة الزائدة على الطرق الفارغة، أو تجاوز الإشارات الحمراء، أو الانحراف إلى المسار الخطأ دون عقاب. تعالج الرؤية الحاسوبية هذه المشكلة باستخدام كاميرات الأشعة تحت الحمراء لرصد المخالفات حتى في ظروف الإضاءة المنخفضة. تنشئ هذه الأنظمة مناطق كشف حيث يتم تسجيل الحوادث، مما يقلل من النتائج الإيجابية الخاطئة ويوفر أدلة واضحة وقابلة للتحقق. بالنسبة لسلطات النقل، فهذا يعني نقاط عمياء أقل واعتماداً أقل على الفحوصات اليدوية.
Link to this sectionإيجابيات وسلبيات كشف حركة المرور في الفيديو ليلاً#
فيما يلي بعض مزايا استخدام الرؤية بالذكاء الاصطناعي لكشف حركة المرور في الفيديو ليلاً.
- القابلية للتوسع: بمجرد ضبط النماذج بدقة، يمكن نشرها عبر العديد من الكاميرات أو التقاطعات، مما يدعم المراقبة على مستوى المدينة.
- التحليلات التنبؤية: يمكن استخدام بيانات الفيديو التاريخية للتنبؤ بالمناطق المزدحمة والمعرضة للحوادث، مما يدعم التدابير الوقائية.
- تحسين الموارد: يوفر للسلطات رؤى في الوقت الفعلي تساعد في تخصيص دوريات الطرق وخدمات الطوارئ بشكل أكثر كفاءة.
على الرغم من فوائدها، فإن كشف حركة المرور ليلاً باستخدام الرؤية بالذكاء الاصطناعي يأتي أيضاً مع قيود معينة. إليك بعض العوامل التي يجب وضعها في الاعتبار:
-
الاعتماد على البيانات: تعتمد دقة أنظمة الرؤية بالذكاء الاصطناعي بشكل كبير على الوصول إلى مجموعات بيانات عالية الجودة تغطي مجموعة واسعة من الظروف الليلية.
-
التحديات البيئية: يمكن لعوامل الطقس مثل الأمطار، أو الضباب، أو الضباب الدخاني، بالإضافة إلى المشكلات العملية مثل عدسات الكاميرا المتسخة أو غير المحاذية، أن تقلل من أداء الكشف وتتطلب صيانة دورية.
-
متطلبات الأجهزة: غالباً ما يتطلب تشغيل نماذج الذكاء الاصطناعي المتقدمة وحدات معالجة رسوميات (GPUs) عالية الأداء أو أجهزة حافة متخصصة، مما قد يجعل النشر على نطاق واسع مكلفاً ومعقداً.
Link to this sectionالطريق إلى الأمام لأنظمة النقل الذكية ليلاً#
مع نمو المدن وازدحام الطرق، يتجه كشف حركة المرور ليلاً نحو أنظمة أكثر ذكاءً واستجابة. على سبيل المثال، يمكن للكاميرات الحرارية وأجهزة استشعار الأشعة تحت الحمراء اكتشاف التوقيعات الحرارية للأشخاص والمركبات، مما يجعل من الممكن الرؤية حتى في الظلام الدامس. وهذا يقلل من الأخطاء التي تحدث عندما تواجه الكاميرات القياسية صعوبة مع الوهج أو الإضاءة المنخفضة.

الشكل 5. تقنية الرؤية الليلية تعزز كشف المشاة ليلاً (المصدر)
نهج آخر متنامٍ هو دمج الكاميرا مع LiDAR. توفر الكاميرات صوراً مفصلة للطريق، بينما يولد LiDAR خريطة 3D دقيقة. عند استخدامهما معاً، فهما يحسنان دقة كشف المسارات، والمركبات، والعوائق، خاصة في الإضاءة المنخفضة أو الضباب المعتدل.
في الوقت نفسه، تعمل التطورات في تحسين صور الإضاءة المنخفضة، والتعرف على المشاة، وتحديد لوحات الترخيص على توسيع قدرات الرؤية الحاسوبية. مع هذه التحسينات، يمكن مراقبة حتى الطرق والتقاطعات ضعيفة الإضاءة بموثوقية أكبر وأخطاء أقل.
Link to this sectionأبرز النقاط#
لطالما كان كشف المركبات ليلاً تحدياً لمراقبة حركة المرور، ولكن الرؤية الحاسوبية تجعل الأمر أكثر قابلية للإدارة. من خلال تقليل تأثير الوهج والتعامل مع مشاهد حركة المرور المعقدة، فإنه يوفر صورة أكثر دقة لكيفية تصرف الطرق بعد حلول الظلام. ومع استمرار تقدم هذه الأنظمة، فهي تمهد الطريق لنقل أكثر أماناً وذكاءً وكفاءة في الليل.
هل أنت مستعد لدمج الرؤية بالذكاء الاصطناعي في مشاريعك؟ انضم إلى مجتمعنا النشط واكتشف ابتكارات مثل الذكاء الاصطناعي في السيارات والرؤية بالذكاء الاصطناعي في الروبوتات. تفضل بزيارة مستودع GitHub الخاص بنا لاكتشاف المزيد. للبدء في الرؤية الحاسوبية اليوم، تحقق من خيارات الترخيص لدينا.






