Verbesserung der Ballflugbahnvorhersage mittels Vision AI
Erfahre, wie Vision AI die Vorhersage von Ballflugbahnen verbessert und Echtzeit-Erkenntnisse für Sport, Robotik und andere smarte Anwendungen ermöglicht.

Wenn dein Lieblingsbasketballspieler einen Wurf macht, kannst du oft sagen, ob er im Korb landet oder danebengeht. Als Mensch kannst du das vorhersagen, weil du wahrscheinlich verschiedene Basketballspiele gesehen hast und weißt, was dich erwartet. Stell dir nun eine Maschine vor, die ein Basketballspiel durch eine Kamera beobachtet und versucht herauszufinden, ob der Wurf im Korb landet.
Es ist viel komplizierter. Die visuelle Intelligenz, die wir durch Erfahrung entwickeln, zu replizieren, ist nicht so einfach, wie es klingt. Tatsächlich ist die Ballflugbahnvorhersage ein faszinierendes Forschungsgebiet, das untersucht, wie Maschinen Bewegung, Spin und Winkel analysieren können, um vorherzusagen, wo ein Ball landen wird.

Abb. 1. Flugbahn eines Basketballwurfs. (Quelle)
Bereits 1537 entdeckte der italienische Mathematiker Niccolò Tartaglia, dass eine Kanonenkugel am weitesten fliegt, wenn sie in einem 45-Grad-Winkel abgefeuert wird. Seine Erkenntnisse legten den Grundstein für unser heutiges Verständnis von Bewegung und Vorhersage.
Heute können Maschinen dank Fortschritten in der Informatik und künstlichen Intelligenz (KI) die Flugbahn eines Balls genau und in Echtzeit vorhersagen. Durch die Analyse von Details wie Position, Geschwindigkeit, Spin und Winkel des Balls können KI-Systeme prognostizieren, wo er landen wird. Dies hilft bei Anwendungen, die von Spielertraining und Leistungsanalyse bis hin zu Gesundheitswesen und Robotik reichen.
Insbesondere ist Computer Vision ein Teilbereich der KI, der Maschinen hilft, visuelle Informationen aus ihrer Umgebung zu interpretieren und zu verstehen. Sie ermöglicht es Systemen, Objekte zu erkennen, deren Bewegung zu verfolgen und durch Kameras oder Videos Sinn in dem zu sehen, was sie wahrnehmen.
Bei der Anwendung auf die Ballflugbahnvorhersage können Computer-Vision-Modelle wie Ultralytics YOLO11 und Ultralytics YOLO26 einem System helfen, den Ball Bild für Bild zu erkennen und zu verfolgen. Diese visuellen Daten liefern genaue Informationen über die Position des Balls in jedem Frame, die dann verwendet werden können, um dessen Geschwindigkeit und Richtung im Zeitverlauf zu schätzen. KI-Modelle und verschiedene Algorithmen können diese Daten dann nutzen, um vorherzusagen, wohin sich der Ball als Nächstes bewegen wird.
In diesem Artikel untersuchen wir die Ballflugbahnvorhersage, die verschiedenen Ansätze und die Rolle von Computer Vision. Fangen wir an!
Link to this sectionDie Bedeutung der Ballflugbahnvorhersage#
Über ein interessantes Forschungsgebiet hinaus treibt die Ballflugbahnvorhersage die Entwicklung praktischer und wirkungsvoller Technologien in vielen Bereichen voran. Bei autonomen Fahrzeugen ermöglicht die Flugbahnvorhersage beispielsweise, dass Autos die zukünftigen Pfade anderer Fahrzeuge, Radfahrer und Fußgänger antizipieren. Indem sie prognostizieren, wo sich diese sich bewegenden Objekte wahrscheinlich in den nächsten Sekunden befinden werden, können selbstfahrende Systeme sicherere und effizientere Entscheidungen treffen, indem sie die Geschwindigkeit anpassen, die Spur wechseln oder potenzielle Kollisionen im Voraus vermeiden.
Ähnlich macht es die Ballflugbahnvorhersage in der Robotik für Maschinen möglich, sich bewegende Objekte mit hoher Präzision zu erkennen, zu verfolgen und darauf zu reagieren. Dies ist besonders nützlich bei automatisierten Systemen, die schnell bewegliche Gegenstände in Echtzeit handhaben müssen, wie etwa Industrieroboter oder Lieferdrohnen.
Link to this sectionEin Überblick über die Funktionsweise der Ballflugbahnvorhersage#
Wie funktioniert also die Vorhersage einer Ballflugbahn tatsächlich? Es hängt von der verwendeten Methode ab. Im Allgemeinen verfolgt jeder Ansatz das gleiche Ziel: verstehen, wie sich der Ball gerade bewegt, und vorhersagen, wohin er als Nächstes gehen wird.
Hier ist ein Einblick in einige der verschiedenen verwendeten Ansätze:
- Physikbasierte Modellierung: Dieser Ansatz nutzt die Bewegungsgesetze und Aerodynamik, um zu berechnen, wie Faktoren wie Geschwindigkeit, Abwurfwinkel, Schwerkraft und Luftwiderstand die Flugbahn des Balls beeinflussen.
- Machine Learning Modelle: Diese Modelle analysieren große Mengen an Bewegungsdaten, um Muster in der Bewegung eines Balls zu erlernen, wodurch sie genaue Vorhersagen treffen können, ohne auf explizite physikalische Gleichungen angewiesen zu sein.
- Computer Vision-basierte Vorhersage: Diese Methode verwendet Videomaterial, um den Ball Bild für Bild zu erkennen und zu verfolgen, wodurch visuelle Daten entstehen, die Algorithmen helfen, Geschwindigkeit, Richtung und zukünftige Position zu schätzen.
- Sensorbasierte Systeme: Diese Systeme verwenden Daten von Bewegungssensoren, Radar oder Infrarotkameras, um Position, Geschwindigkeit und Spin des Balls in Echtzeit präzise zu messen.
- Hybridmethoden: Sie kombinieren zwei oder mehr Techniken. Zum Beispiel die Integration von Computer Vision mit physikbasierter Modellierung, um genauere und zuverlässigere Flugbahnvorhersagen zu erzielen.
Als Nächstes werden wir uns genauer ansehen, wie Computer Vision-basierte Ballflugbahnvorhersagen funktionieren und welche Algorithmen dies ermöglichen.
Link to this sectionDie Grundlagen der Ballflugbahnvorhersage#
Bevor wir uns ansehen, wie Computer Vision eine Rolle bei der Ballflugbahnvorhersage spielt und wie diese Systeme arbeiten, lass uns die Grundlagen aufschlüsseln.
Die Ballflugbahnvorhersage umfasst im Allgemeinen zwei Hauptteile: Tracking und Bewegungsmodellierung. Tracking-Algorithmen werden verwendet, um den Ball in einem Video Bild für Bild zu verfolgen und zu schätzen, wo er als Nächstes erscheinen wird. Diese Methoden sind für kurzfristige Echtzeit-Vorhersagen nützlich.
Andererseits gehen Bewegungsmodellierungsmethoden (die typischerweise Physik oder Machine Learning beinhalten) einen Schritt weiter. Sie zielen darauf ab, den gesamten Pfad des Balls vorherzusagen, einschließlich des Landepunkts.
Einfach ausgedrückt: Das Tracking bestimmt die aktuelle Position und Bewegung des Balls, während die Modellierung diese Informationen nutzt, um seinen zukünftigen Pfad und Landepunkt zu schätzen. Zusammen ermöglichen sie eine genaue Ballflugbahnvorhersage in Echtzeit.
Link to this sectionEin genauerer Blick auf Tracking und Bewegungsmodellierung#
Du fragst dich vielleicht, warum der Unterschied zwischen Tracking und Vorhersage wichtig ist. Wenn wir dieses Thema weiter erforschen, wirst du feststellen, dass viele Tracking-Algorithmen nicht nur verfolgen. Sie treffen auch kurzfristige Vorhersagen darüber, wo der Ball als Nächstes erscheinen wird.
Zum Beispiel verwenden Computer-Vision-Modelle wie YOLO11, die Objekt-Tracking durch Tracking-Algorithmen wie ByteTrack oder SORT unterstützen, Erkennungsdaten aus jedem Videobild, um die nächste Position des Balls in Echtzeit zu schätzen. Dies hilft dem System, ein genaues Tracking beizubehalten, selbst wenn sich der Ball schnell bewegt oder teilweise verdeckt wird.
Obwohl diese Modelle jedoch großartig darin sind, Bewegungen zu folgen, sagen sie typischerweise nur die nächste Position des Balls voraus und nicht seine gesamte Flugbahn oder seinen Landepunkt. Genau hier werden Bewegungsmodellierungsmethoden unerlässlich.
Mit anderen Worten: Ein Computer-Vision-Modell allein kann die Flugbahn eines Balls nicht vollständig vorhersagen. Es kann die Position des Balls Bild für Bild erkennen und verfolgen, berücksichtigt aber nicht die physikalischen Kräfte, die seine Bewegung beeinflussen, wie Schwerkraft, Spin, Luftwiderstand oder Luftreibung.
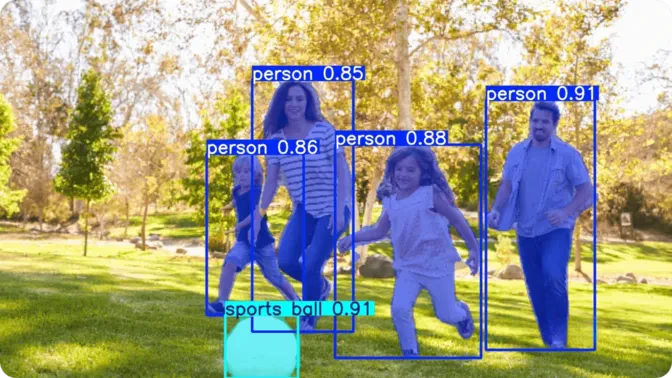
Abb. 2. Ein Beispiel für Ballerkennung und -segmentierung mit YOLO11. (Quelle)
Um genaue langfristige Vorhersagen zu treffen, werden die visuellen Daten aus der Computer Vision oft mit Bewegungsmodellierungsmethoden kombiniert. Diese Methoden verwenden entweder physikbasierte Gleichungen oder Machine Learning-Algorithmen, um die Bewegung des Balls im Zeitverlauf zu analysieren und seinen vollständigen Pfad vorherzusagen, einschließlich des Punktes, an dem er landen wird.
Link to this sectionGängige Algorithmen für das Ball-Tracking in der Computer Vision#
Tracking-Algorithmen sind ein entscheidender Bestandteil von Systemen zur Ballflugbahnvorhersage. Sie schätzen die Position und Bewegung des Balls im Zeitverlauf und bewältigen dabei Herausforderungen wie kurze Okklusionen (wenn der Ball vorübergehend durch ein anderes Objekt verdeckt ist).
Als Nächstes gehen wir einige gängige Tracking-Algorithmen durch.
Link to this sectionKalman-Filter#
Der Kalman-Filter ist ein mathematischer Algorithmus, der verwendet wird, um die Position und Geschwindigkeit eines Objekts im Zeitverlauf zu schätzen, selbst wenn Messungen verrauscht oder unvollständig sind. NASA hat beispielsweise Kalman-Filter verwendet, um die Pfade von Flugkörpern zu verfolgen und zu rekonstruieren.
Durch die Kombination von Sensordaten mit Modellen der Fahrzeugbewegung kann das System verrauschte Daten bereinigen, die tatsächliche Flugbahn präzise rekonstruieren und kurzfristige Vorhersagen darüber treffen, wohin sich das Fahrzeug als Nächstes bewegen wird. Dies macht die Filter sehr nützlich für Echtzeit-Tracking und Steuerung in vielen Bereichen.
Obwohl der Kalman-Filter selbst kein Computer-Vision-Algorithmus ist, wird er in vision-basierten Systemen häufig verwendet, um sich bewegende Objekte wie einen Ball über Videobilder hinweg zu verfolgen. Er funktioniert, indem er vorhersagt, wo das Objekt als Nächstes erscheinen wird, diese Vorhersage mit den tatsächlichen Erkennungsdaten vergleicht und dann seine Schätzung aktualisiert, um genau zu bleiben. Dieser kontinuierliche Vorhersage- und Korrekturzyklus macht ihn effektiv für das Echtzeit-Tracking, selbst wenn das Objekt kurzzeitig aus dem Sichtfeld verschwindet oder plötzlich die Geschwindigkeit ändert.
Link to this sectionByteTrack#
ByteTrack ist ein Echtzeit-Objekt-Tracking-Algorithmus, der verwendet wird, um sich bewegende Objekte wie Bälle über Videobilder hinweg zu verfolgen. Er funktioniert, indem er Objekte in jedem Bild erkennt und Erkennungen desselben Objekts über die Zeit verknüpft, wodurch eine kontinuierliche Sequenz, ein sogenanntes Tracklet, entsteht.
Ein Tracklet ist eine kurze Reihe von Bildern, die zeigt, wo sich das Objekt befunden hat und wie es sich bewegt. Dieser Verknüpfungsprozess hilft dem System, eine konsistente Identität für jedes Objekt im gesamten Video beizubehalten.
Im Gegensatz zu älteren Tracking-Methoden, die Erkennungen mit geringem Konfidenzwert verwerfen, behält ByteTrack diese bei und prüft sie erneut. Das bedeutet, dass es ein reibungsloses und stabiles Tracking beibehalten kann, selbst wenn sich Objekte schnell bewegen, verschwommen werden oder kurzzeitig verdeckt sind. Obwohl ByteTrack kein eigenständiger Objektdetektor ist, wird er oft in Verbindung mit Computer-Vision-Modellen wie Ultralytics YOLOv8 oder YOLO11 verwendet, um Objekte präzise und zuverlässig in Echtzeit zu verfolgen.
Link to this sectionBoT-SORT#
BoT-SORT ist ein fortschrittlicher Multi-Objekt-Tracking-Algorithmus, der verbessert, wie Systeme sich bewegende Objekte über Videobilder hinweg verfolgen. Er baut auf ByteTrack auf und fügt Schlüsselfunktionen wie Kamerabewegungskompensation und Objekt-Re-Identifizierung hinzu.
Die Kamerabewegungskompensation hilft bei der Korrektur von Kamerabewegungen wie Schwenken oder Wackeln, während die Re-Identifizierung es dem System ermöglicht, dasselbe Objekt zu erkennen und weiter zu verfolgen, selbst nachdem es das Sichtfeld verlassen und wieder betreten hat. Wie ByteTrack wird er auch in Kombination mit Modellen wie YOLOv8 oder YOLO11 verwendet.
Link to this sectionGängige Flugbahnvorhersagemethoden#
Nachdem wir gesehen haben, wie Tracking funktioniert und wie es mit der Vorhersage der Flugbahn eines Balls zusammenhängt, lass uns einen genaueren Blick auf die wichtigsten Arten von Flugbahnvorhersagealgorithmen und Methoden werfen, die zur Schätzung der Ballbewegung verwendet werden.
Link to this sectionPhysikbasierte kinematische Modellierung#
Die physikbasierte kinematische Modellierung sagt die Flugbahn eines Balls unter Verwendung der grundlegenden Bewegungsgesetze voraus. Sie berücksichtigt Faktoren wie die Anfangsgeschwindigkeit des Balls, den Abwurfwinkel, Schwerkraft, Luftwiderstand und Spin, um seinen Flugpfad zu berechnen. Durch die Kombination dieser Faktoren schätzt das Modell, wo sich der Ball zu jedem Zeitpunkt befinden wird, wie schnell er sich bewegen wird und in welche Richtung.
Zum Beispiel hilft es in Sportarten wie Baseball oder Golf vorherzusagen, wie weit und in welche Richtung der Ball basierend auf Schwunggeschwindigkeit und Abwurfwinkel fliegen wird. Obwohl es in kontrollierten Umgebungen sehr genau ist, kann es bei unvorhersehbaren realen Bedingungen wie Wind, Bodenkontakt oder Spielerinteraktionen zu Schwierigkeiten kommen und Vorhersagefehler verursachen.
In Kombination mit Computer Vision ermöglichen physikmodellbasierte Methoden praktische Anwendungen in der Sportanalytik und Schiedsrichtertätigkeit. Hawk-Eye ist beispielsweise ein Multikamera-Visionssystem, das die 3D-Flugbahn eines Balls in Echtzeit rekonstruiert.
Es verwendet mehrere synchronisierte Hochgeschwindigkeitskameras, um die Position des Balls aus mehreren Winkeln zu erfassen, und wendet Triangulation, kinematische Gleichungen und Interpolationsmethoden an, um seinen Pfad zu schätzen. Diese Integration unterstützt präzises Tracking und Entscheidungsfindung im Sport, einschließlich Tennis, Cricket und Fußball, wo die Genauigkeit der Flugbahn für Linienentscheidungen und Leistungsanalysen unerlässlich ist.
Link to this sectionMachine Learning Regressionsmodelle#
Machine Learning Regressionsmodelle können die zukünftige Position oder Flugbahn eines Balls vorhersagen, ohne sich auf explizite physikalische Gleichungen zu stützen. Stattdessen lernen sie Muster aus Daten wie Position, Geschwindigkeit, Spin und Winkel, die durch videobasierte Tracking-Systeme oder Sensoren gesammelt wurden.
In Kombination mit Computer-Vision-Tracking-Algorithmen erfasst das Visionssystem die Position des Balls über Videobilder hinweg. Diese Positionsdaten werden zum Input für das Regressionsmodell, das lernt, wie sich die Bewegung des Balls über die Zeit verändert. Nach dem Training kann das Modell die nächste Position oder den gesamten Pfad des Balls basierend auf dem bereits Beobachteten vorhersagen.
Zum Beispiel haben sich bei Tischtennisrobotern oder Ping-Pong-Robotersystemen Regressionsmodelle, die auf Tausenden von verfolgten Flugbahnen trainiert wurden, als fähig erwiesen, die Flug- und Sprungmuster des Balls in Echtzeit vorherzusagen. Dies ermöglicht es dem Roboter, sich zu positionieren oder schnell zu reagieren, um den Ping-Pong-Ball oder Tischtennisball zu fangen oder zurückzuspielen. Da diese Modelle direkt aus realen Beispielen lernen, bewältigen sie oft unvorhersehbare Effekte wie Spin, Luftwiderstand oder Oberflächenkontakt besser als rein physikbasierte Methoden.
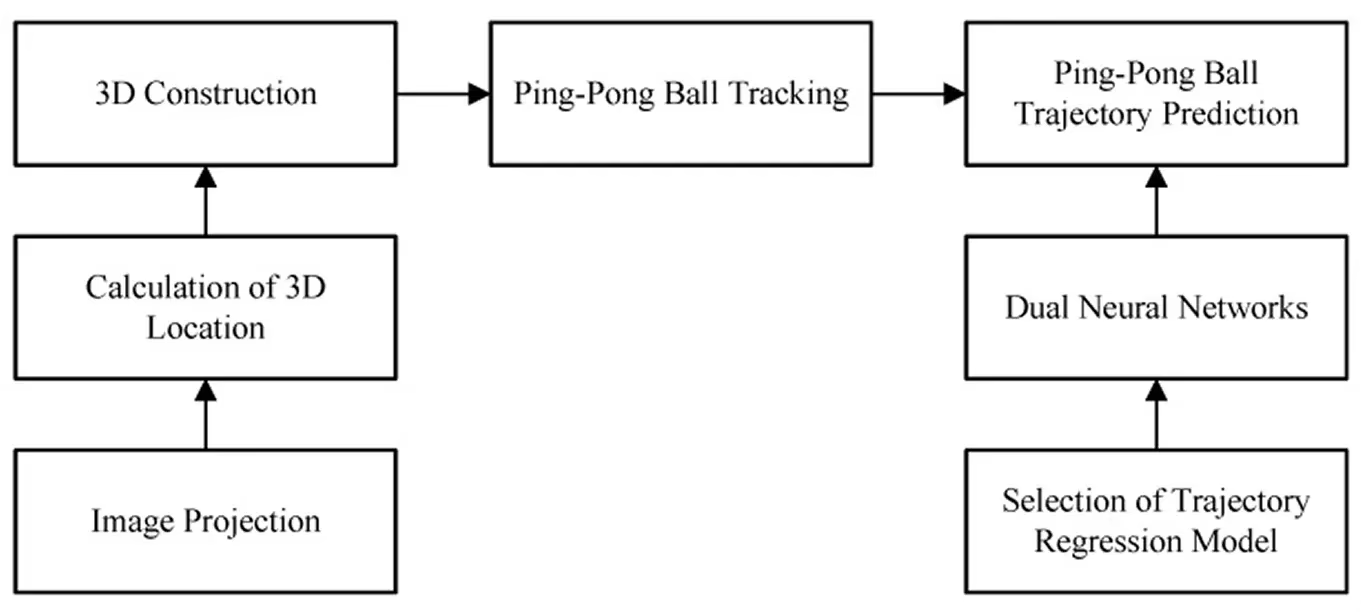
Abb. 3. Wie ein Ping-Pong-Roboter die Flugbahn eines Balls vorhersagt. (Quelle)
Link to this sectionRekurrente neuronale Netze (RNNs) und Long Short-Term Memory-Netzwerke (LSTMs)#
Rekurrente neuronale Netze (RNNs) und Long Short-Term Memory-Netzwerke (LSTMs) sind KI-Modelle, die darauf ausgelegt sind, Daten zu verarbeiten, die sich über die Zeit verändern, wie Bewegung oder andere Zeitreiheninformationen. Sie können sich daran erinnern, was früher passiert ist, was ihnen hilft, Bewegungsmuster zu erkennen und vorherzusagen, was als Nächstes passieren könnte.
Bei der Ballflugbahnvorhersage lernen diese Modelle, wie frühere Positionen, Geschwindigkeiten und Spins eines Balls beeinflussen, wohin er sich als Nächstes bewegen wird. In Kombination mit Computer Vision und Objekt-Tracking kann ein Visionssystem die Positionen des Balls über Frames hinweg erfassen. Ein RNN kann dann diese Sequenz von Positionen verwenden, um den nächsten Zug oder den gesamten Pfad des Balls vorherzusagen.
Zudem sind LSTMs besonders wirkungsvoll, da sie Informationen über längere Zeiträume speichern können. Dies ermöglicht es ihnen, der vollständigen Bewegung eines Balls zu folgen, selbst wenn er sich schnell bewegt oder die Richtung ändert.
Die neuere Forschung hat diese Idee noch einen Schritt weiter gebracht. Wissenschaftler haben hierarchische Bi-LSTM-Modelle entwickelt, die Ballflugbahnen in Mannschaftssportarten vorhersagen können, indem sie analysieren, wie sich Spieler bewegen und miteinander interagieren. Diese Modelle können sogar die Position des Balls schätzen, wenn er vorübergehend verborgen oder außerhalb des Sichtfelds ist, indem sie Muster im Spielerverhalten nutzen, um abzuleiten, wo sich der Ball höchstwahrscheinlich befindet.
Link to this sectionReale Anwendungen der Ballflugbahnvorhersage#
Mit einem besseren Verständnis von Computer Vision und Ballflugbahnvorhersage wollen wir nun die praktischen Anwendungen in Bereichen wie Sport, Rehabilitation und Robotik erforschen.
Link to this sectionBallflugbahnvorhersage im Sport#
Zu verstehen, wie sich ein Ball bewegt und wo er landen wird, ist in vielen Sportarten entscheidend. Mithilfe von Informationen aus Kameras und Sensoren können KI-Modelle den Pfad und die Anfangsgeschwindigkeit des Balls vorhersagen, was Sportteams hilft, Spielzüge zu antizipieren, Techniken zu verbessern und klügere Entscheidungen zu treffen.
Es unterstützt auch das Spielertraining durch die Analyse von Faktoren wie Spin oder Abwurfwinkel, was Sportlern hilft, ihre Leistung zu verbessern und Verletzungen zu vermeiden. Viele hochmoderne Sporttrainingssysteme nutzen heute die Ballflugbahnvorhersage, um die Kompetenzentwicklung und Strategie zu verbessern.
Forscher haben beispielsweise ein Computer-Vision-System für Tennisroboter entwickelt, das den Pfad eines Tennisballs erkennen und vorhersagen kann. Unter Verwendung von Stereokameras und konvolutionalen neuronalen Netzen hilft das System dem Roboter, den Ball in drei Dimensionen (x-, y- und z-Achse) zu sehen und während des Spiels genauer zu reagieren. Dies kann ein spielentscheidendes Werkzeug für das Training von Spielern für Wettbewerbe sein.
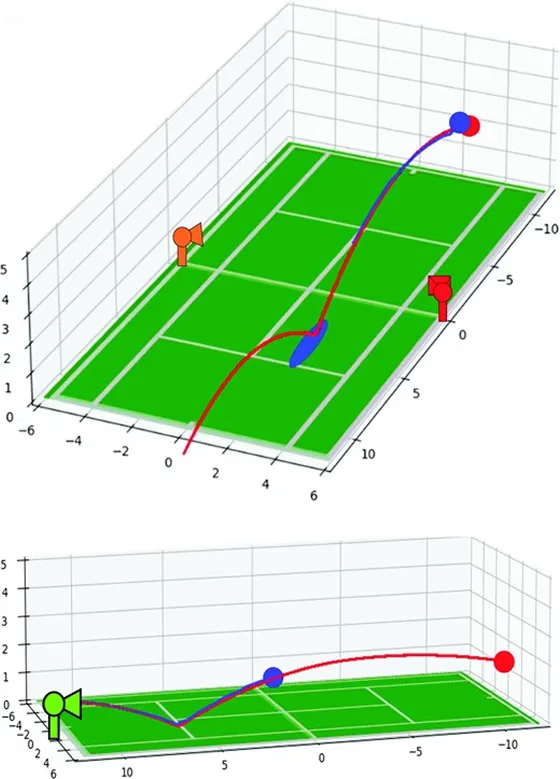
Abb. 4. Rot zeigt den simulierten Pfad; Blau zeigt die Ballflugbahnvorhersage des Roboters. (Quelle)
Link to this sectionVor- und Nachteile der Computer Vision-basierten Ballflugbahnvorhersage#
Hier sind einige wichtige Vorteile der Verwendung von Computer Vision-basierten Systemen zur Ballflugbahnvorhersage:
- Echtzeit-Prognose: Diese Systeme können den zukünftigen Pfad eines Balls sofort präzise vorhersagen, selbst bei hohen Geschwindigkeiten.
- Nicht-invasiv: Sie können ausschließlich mit Video-Input arbeiten, ohne dass physische Sensoren oder Markierungen erforderlich sind.
- Skalierbar und anpassungsfähig: Vision-basierte Ballflugbahnvorhersagesysteme können mittels Standard-Kamera-Setups über verschiedene Sportarten und Umgebungen hinweg angewendet werden.
Obwohl die Computer Vision-basierte Ballflugbahnvorhersage viele Vorteile hat, gibt es auch einige Einschränkungen zu berücksichtigen. Hier sind einige Faktoren, die man im Hinterkopf behalten sollte:
- Herausforderungen durch Okklusion: Vorhersagen können oft ungenauer werden, wenn ein Ball hinter Spielern oder anderen Objekten verborgen ist.
- Beleuchtungs- und Sichtbarkeitsprobleme: Die Leistung dieser Systeme kann bei schlechter Beleuchtung oder komplexen Hintergründen, etwa nachts, gering sein.
- Hoher Rechenaufwand: Die Verarbeitung von Videos mit hoher Bildrate und Deep-Learning-Modellen erfordert leistungsstarke Hardware, die teuer sein kann.
Link to this sectionWichtige Erkenntnisse#
Die Vorhersage der Flugbahn eines Balls mit Vision AI vereint Physik, Computer Vision und Machine Learning, um Bewegung mit bemerkenswerter Genauigkeit zu verstehen und zu prognostizieren. Von der Analyse der sportlichen Leistung bis hin zur Unterstützung der Patientenwiederherstellung und industrieller Automationssysteme verwandelt die Flugbahnvorhersage visuelle Daten in umsetzbare Erkenntnisse. Da die Technologie weiter fortschreitet, ebnet sie den Weg für intelligentere, schnellere und anpassungsfähigere Methoden, die Leistung, Sicherheit und Entscheidungsfindung verbessern.
Werde Teil unserer wachsenden Community und erkunde unser GitHub repository für praktische KI-Ressourcen. Um noch heute mit Vision AI zu entwickeln, erkunde unsere Lizenzierungsoptionen. Erfahre durch den Besuch unserer Lösungsseiten, wie KI in der Landwirtschaft die Landwirtschaft transformiert und wie Vision AI in der Robotik die Zukunft gestaltet.






