Verbesserung der Fahrzeug-Wiedererkennung mit Ultralytics YOLO-Modellen
Erfahre, wie Ultralytics YOLO-Modelle durch präzise und genaue Erkennungen eine Rolle bei Lösungen zur Fahrzeug-Wiedererkennung spielen können.

Wenn du dir ein Formula One-Rennen ansiehst, ist es leicht, das Auto deines Lieblingsteams zu erkennen. Das leuchtende Rot von Ferrari oder das Silber von Mercedes sticht Runde um Runde hervor.
Eine Maschine dazu zu bringen, dasselbe zu tun – nicht auf einer sauberen Rennstrecke, sondern auf belebten Straßen voller Verkehr – ist weitaus anspruchsvoller. Deshalb hat die Fahrzeug-Re-Identifizierung (Fahrzeug-Re-ID) in der KI-Welt in letzter Zeit zunehmend an Aufmerksamkeit gewonnen.
Die Fahrzeug-Re-Identifizierung gibt Maschinen die Fähigkeit, dasselbe Fahrzeug über Multi-View- oder nicht überlappende Kameras hinweg zu erkennen. Sie zielt auch darauf ab, Fahrzeuge nach vorübergehender Verdeckung (wenn ein Fahrzeug teilweise verdeckt ist) oder bei Änderungen von Lichtverhältnissen und Blickwinkeln zu identifizieren.
Eine Kerntechnologie, die die Fahrzeug-Re-ID antreibt, ist Computer Vision. Computer Vision ist ein Teilbereich der künstlichen Intelligenz, der sich darauf konzentriert, Maschinen beizubringen, visuelle Informationen wie Bilder und Videos zu verstehen und zu interpretieren. Mithilfe dieser Technologie können KI-Systeme Fahrzeugmerkmale analysieren und sie über große Kameranetzwerke hinweg zuverlässig verfolgen, etwa für Anwendungen wie städtische Überwachung und Verkehrsbeobachtung.
Insbesondere Vision AI-Modelle wie Ultralytics YOLO11 und das kommende Ultralytics YOLO26 unterstützen Aufgaben wie Objekterkennung und Tracking. Sie können Fahrzeuge schnell in jedem Frame lokalisieren und ihre Bewegung durch eine Szene verfolgen. Wenn diese Modelle mit Fahrzeug-Re-Identifizierungsnetzwerken kombiniert werden, kann das Gesamtsystem dasselbe Fahrzeug über verschiedene Kamera-Feeds hinweg erkennen, selbst wenn sich die Blickwinkel oder Lichtverhältnisse ändern.
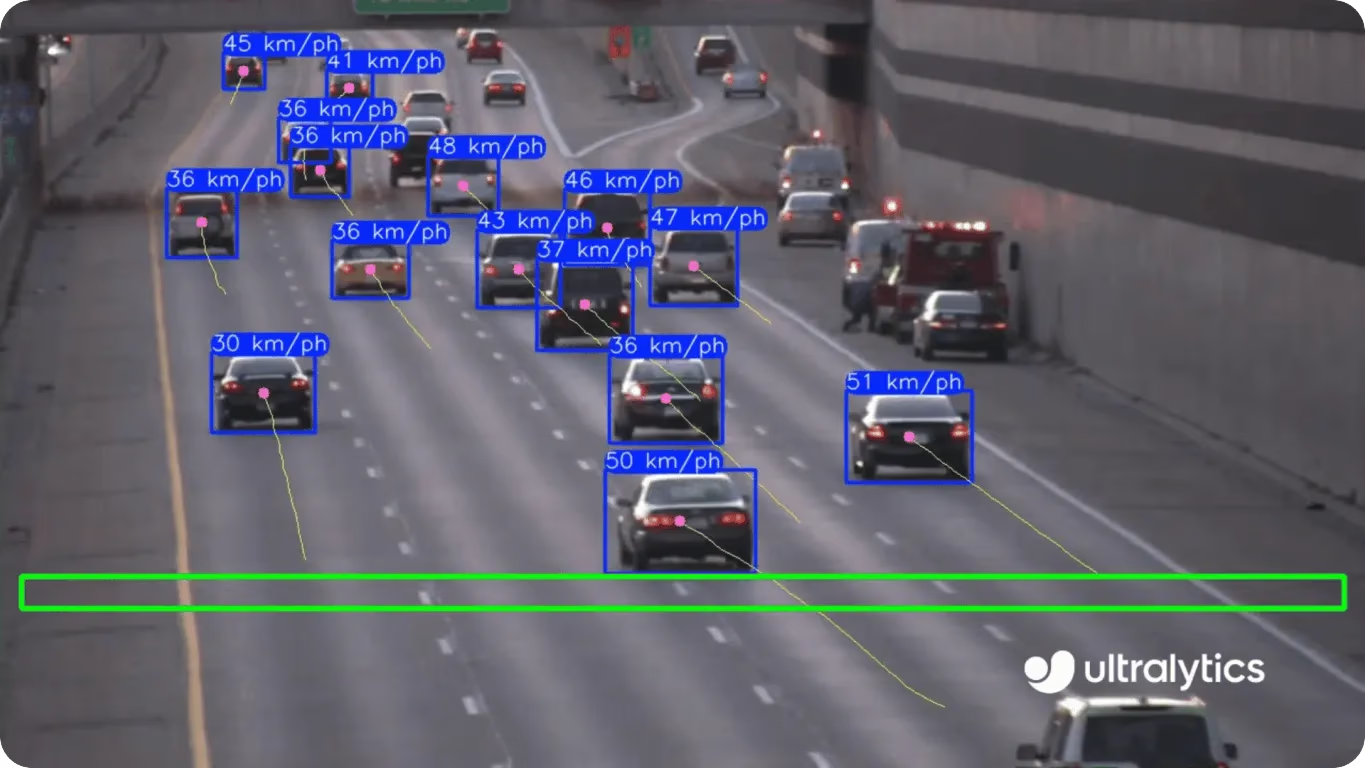
Abb. 1. Ein Beispiel für die Verwendung von YOLO11 zur Fahrzeugverfolgung und Geschwindigkeitsmessung (Quelle)
In diesem Artikel betrachten wir, wie Fahrzeug-Re-Identifizierung funktioniert, die Technologie, die sie ermöglicht, und wo sie in intelligenten Verkehrssystemen eingesetzt wird. Fangen wir an!
Link to this sectionWas ist Fahrzeug-Re-Identifizierung?#
Fahrzeug-Re-Identifizierung ist eine wichtige Anwendung in der Computer Vision. Sie konzentriert sich darauf, dasselbe Fahrzeug zu erkennen, wenn es über verschiedene, nicht überlappende Kameras erscheint, und seine Identität konsistent zu halten, während es sich durch eine Stadt bewegt. Dies ist eine Herausforderung, da jede Kamera das Fahrzeug aus einem anderen Winkel, unter anderem Licht oder mit teilweiser Verdeckung erfassen kann.
Stell dir ein Szenario vor, in dem eine blaue Limousine eine Kreuzung passiert und später auf einer anderen Straße erscheint, beobachtet von einer anderen Kamera. Der Winkel, das Licht und der Hintergrund haben sich geändert, und andere Autos könnten die Sicht kurzzeitig versperren. Trotzdem muss das Fahrzeug-Re-ID-System bestimmen, dass es sich um dasselbe Fahrzeug handelt.
Jüngste Fortschritte im Deep Learning, insbesondere bei Convolutional Neural Networks (CNNs) und Transformer-basierten Modellen, haben diesen Prozess weitaus genauer gemacht. Diese Modelle können aussagekräftige visuelle Muster extrahieren und zwischen ähnlich aussehenden Fahrzeugen unterscheiden, während sie gleichzeitig das richtige identifizieren.
In intelligenten Verkehrssystemen unterstützt diese Fähigkeit die kontinuierliche Überwachung, Routenrekonstruktion und stadtweite Verkehrsanalyse und gibt Smart-City-Systemen ein klareres Bild davon, wie sich Fahrzeuge bewegen. Sie helfen dabei, Sicherheit und Effizienz zu verbessern.
Link to this sectionVerständnis der Funktionsweise der Fahrzeug-Re-Identifizierung#
Typischerweise wird Videomaterial von Kreuzungen, Parkplätzen und Autobahnen mittels Fahrzeug-Re-Identifizierungstechniken analysiert, um zu bestimmen, ob dasselbe Fahrzeug über verschiedene Kameras hinweg erscheint. Dieses Konzept ähnelt der Personen-Re-Identifizierung, bei der Systeme Einzelpersonen über mehrere Ansichten hinweg verfolgen, aber hier liegt der Fokus auf der Analyse fahrzeugspezifischer Merkmale anstelle des menschlichen Erscheinungsbilds.
Der Prozess dazu umfasst mehrere wichtige Schritte, die jeweils darauf ausgelegt sind, dem System zu helfen, Fahrzeuge zu erkennen, ihre visuellen Merkmale zu extrahieren und sie über verschiedene Blickwinkel hinweg zuverlässig abzugleichen.
Auf hoher Ebene erkennt das System zuerst Fahrzeuge in jedem Frame und extrahiert dann Merkmale wie Farbe, Form und Textur, um eine eindeutige digitale Repräsentation, oder ein Embedding, für jedes einzelne zu erstellen. Diese Embeddings werden über die Zeit und über Kameras hinweg verglichen, oft unterstützt durch Objekt-Tracking und räumlich-zeitliche Prüfungen, um zu entscheiden, ob zwei Sichtungen zum selben Fahrzeug gehören.
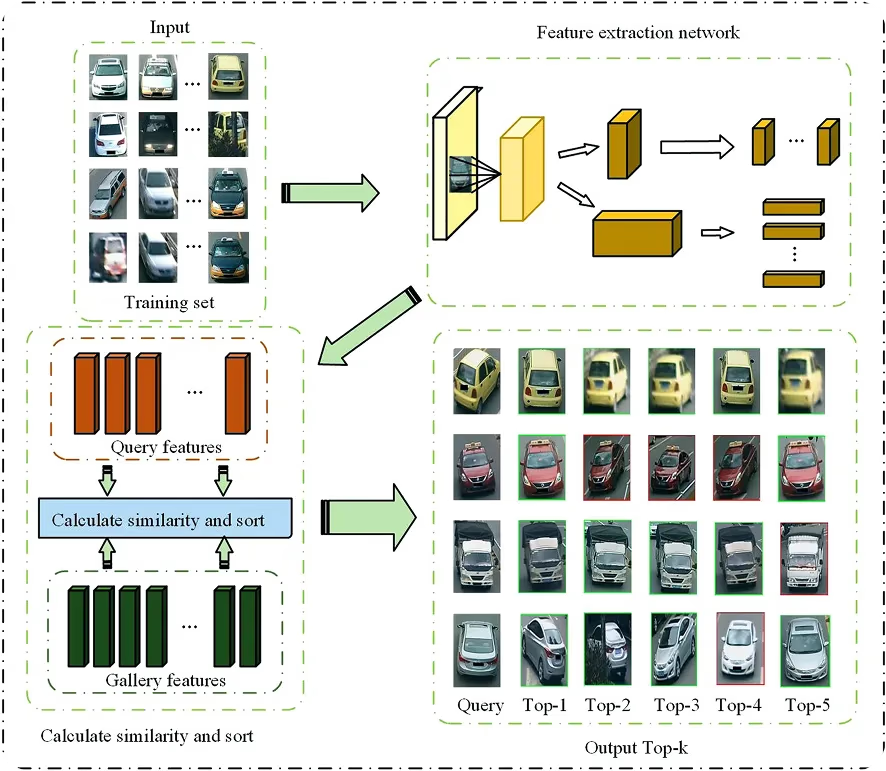
Abb. 2. Wie Fahrzeug-Re-Identifizierung funktioniert. (Quelle)
Hier ist ein genauerer Blick auf diesen Prozess:
- Object detection: Das System identifiziert und lokalisiert zunächst Fahrzeuge innerhalb jedes Videoframes, sodass es genau weiß, welche Bereiche verarbeitet werden müssen. Dieser Schritt wird typischerweise von Objekterkennungsmodellen übernommen.
- Feature extraction: Nach der Erkennung analysiert ein dediziertes Re-ID- oder Merkmalsextraktionsnetzwerk jeden Fahrzeug-Ausschnitt und generiert Merkmalskarten oder Merkmalsdarstellungen, die visuelle Details wie Farbe, Form, Textur und charakteristische Teile erfassen.
- Embedding generation: Diese extrahierten Merkmale werden in eine numerische Repräsentation namens Feature-Embedding umgewandelt. Dieses Embedding fungiert wie ein digitaler Fingerabdruck, der erfasst, wie das Fahrzeug aus verschiedenen Winkeln aussieht. Vor dem Abgleich werden diese Embeddings üblicherweise normalisiert, damit Unterschiede durch Licht, Kontrast oder Kameraeinstellungen den Identitätsvergleich nicht beeinträchtigen. Die Normalisierung stellt sicher, dass sich das System auf aussagekräftige, identitätsrelevante Merkmale konzentriert anstatt auf Rauschen.
- Object tracking: Innerhalb einer einzigen Kameraansicht verbinden Tracking-Algorithmen Erkennungen über Frames hinweg und helfen dabei, eine konsistente Identität beizubehalten, während sich das Fahrzeug durch die Szene bewegt.
- Cross-camera matching: Um dasselbe Fahrzeug über verschiedene Kameras hinweg abzugleichen, vergleicht das System Embeddings (die vom Re-ID-Netzwerk generiert wurden) zusammen mit Zeit- und Standortinformationen. Dieser Schritt bestimmt, ob zwei Sichtungen zum selben Fahrzeug gehören, selbst wenn die Kameras nicht überlappen.
Link to this sectionWie Ultralytics YOLO Modelle die Fahrzeug-Re-Identifizierung unterstützen können#
Ultralytics YOLO Modelle spielen eine wichtige unterstützende Rolle in Fahrzeug-Re-Identifizierungs-Pipelines. Obwohl sie keine Re-ID eigenständig durchführen, bieten sie andere wesentliche Fähigkeiten, wie schnelle Erkennung und stabiles Tracking, von denen Re-ID-Netzwerke für einen präzisen kameraübergreifenden Abgleich abhängen.
Als Nächstes werfen wir einen genaueren Blick darauf, wie Ultralytics YOLO Modelle wie YOLO11 Fahrzeug-Re-Identifizierungssysteme verbessern können.
Link to this sectionEin genaues Fahrzeug-Erkennungsmodul: Der erste Teil von Re-ID-Systemen#
Das Fundament jedes Fahrzeug-Re-Identifizierungssystems ist eine genaue Objekterkennung. Ultralytics YOLO Modelle wie YOLO11 sind dafür eine großartige Option, da sie Fahrzeuge schnell in jedem Frame erkennen können, selbst in belebten Szenen mit teilweisen Verdeckungen, starkem Verkehr oder wechselnden Lichtverhältnissen.
Sie können auch individuell trainiert werden, was bedeutet, dass du das Modell auf deinem eigenen Datensatz feinabstimmen kannst, damit es lernt, spezifische Fahrzeugtypen wie Taxis, Lieferwagen oder Flottenfahrzeuge zu erkennen. Dies ist besonders nützlich, wenn eine Lösung eine spezialisiertere Erkennung erfordert. Durch die Bereitstellung sauberer, präziser Bounding-Boxen liefern Ultralytics YOLO Modelle Re-ID-Netzwerken qualitativ hochwertige Eingaben, was zu einem zuverlässigeren Abgleich über Kameras hinweg führt.
Link to this sectionUnterstützung eines zuverlässigen Single-Camera-Trackings#
Sobald Fahrzeuge erkannt sind, können Modelle wie YOLO11 auch ein stabiles Objekt-Tracking innerhalb einer einzigen Kameraansicht unterstützen. Objekt-Tracking ist der Prozess, ein erkanntes Fahrzeug über aufeinanderfolgende Frames hinweg zu verfolgen und ihm eine konsistente ID zuzuweisen, während es sich bewegt.
Mit der integrierten Unterstützung für Tracking-Algorithmen wie ByteTrack und BoT-SORT im Ultralytics Python package kann YOLO11 konsistente IDs beibehalten, während sich Fahrzeuge durch eine Szene bewegen. Dieses stabile Tracking reduziert Identitätswechsel, bevor das Re-ID-System übernimmt, was letztendlich die Genauigkeit des kameraübergreifenden Abgleichs verbessert.
Link to this sectionOptionales Re-ID auf Tracker-Ebene für verbesserte Identitätsstabilität#
Zusätzlich zum standardmäßigen bewegungsbasierten Tracking enthält das Ultralytics Python package optionale erscheinungsbasierte Re-ID-Funktionen innerhalb seines BoT-SORT-Trackers. Dies bedeutet, dass der Tracker visuelle Erscheinungsmerkmale verwenden kann, nicht nur Bewegungsmuster oder Bounding-Box-Überlappungen, um zu bestimmen, ob zwei Erkennungen zum selben Fahrzeug gehören.
Wenn aktiviert, extrahiert BoT-SORT leichtgewichtige Erscheinungs-Embeddings vom Detektor oder von einem YOLO11-Klassifizierungsmodell und verwendet diese, um die Identität zwischen Frames zu verifizieren. Dieser zusätzliche Erscheinungshinweis hilft dem Tracker, stabilere IDs in herausfordernden Situationen beizubehalten, wie z. B. bei kurzen Verdeckungen, Fahrzeugen, die nah aneinander vorbeifahren, oder kleinen Verschiebungen durch Kamerabewegungen.
Obwohl diese eingebaute Re-ID nicht dazu gedacht ist, eine vollständige kameraübergreifende Fahrzeug-Re-Identifizierung zu ersetzen, verbessert sie die Identitätskonsistenz innerhalb einer einzigen Kameraansicht und erzeugt sauberere Tracklets, auf die nachgelagerte Re-ID-Module vertrauen können. Um diese erscheinungsbasierten Tracking-Funktionen zu nutzen, aktivierst du einfach die Re-ID in einer BoT-SORT-Tracker-Konfigurationsdatei, indem du „with_reid“ auf „True“ setzt und auswählst, welches Modell die Erscheinungsmerkmale liefern soll.
Für weitere Details kannst du die Ultralytics Dokumentationsseite zum Thema Object Tracking ansehen, die die verfügbaren Re-ID-Optionen und deren Konfiguration erläutert.
Link to this sectionBereitstellung qualitativ hochwertiger Eingaben für Re-ID-Netzwerke#
Über die Verbesserung der Identitätsstabilität während des Trackings hinaus spielen YOLO Modelle auch eine wichtige Rolle bei der Vorbereitung sauberer visueller Eingaben für das Re-ID-Netzwerk selbst.
Nachdem ein Fahrzeug erkannt wurde, wird seine Bounding-Box typischerweise ausgeschnitten und an ein Re-Identifizierungsnetzwerk gesendet, das die für den Abgleich benötigten visuellen Merkmale extrahiert. Da Re-ID-Modelle stark von diesen zugeschnittenen Bildern abhängen, können schlechte Eingaben, wie verschwommene, falsch ausgerichtete oder unvollständige Ausschnitte, zu schwächeren Embeddings und einem weniger zuverlässigen kameraübergreifenden Abgleich führen.
Ultralytics YOLO Modelle helfen, diese Probleme zu reduzieren, indem sie konsistent saubere, gut ausgerichtete Bounding-Boxen produzieren, die das betreffende Fahrzeug vollständig erfassen. Mit klareren und genaueren Ausschnitten kann sich das Re-ID-Netzwerk auf aussagekräftige Details wie Farbe, Form, Textur und andere unterscheidende Merkmale konzentrieren. Hochwertige Eingaben führen zu einer verlässlicheren und genaueren Re-ID-Leistung über Kameraansichten hinweg.
Link to this sectionErmöglichung des kameraübergreifenden Abgleichs in Kombination mit einem Re-ID-Modell#
Obwohl Ultralytics YOLO Modelle keine Re-Identifizierung eigenständig durchführen, liefern sie die kritischen Informationen, die ein Re-ID-Netzwerk benötigt, um Fahrzeuge über verschiedene Kameraansichten hinweg zu vergleichen. Modelle wie YOLO11 können die Lokalisierung und Verfolgung von Fahrzeugen innerhalb jeder Kamera übernehmen, während das Re-ID-Modell bestimmt, ob zwei Fahrzeug-Ausschnitte von verschiedenen Standorten zur selben Identität gehören.
Wenn diese Komponenten zusammenarbeiten – YOLO für die Erkennung und das Tracking sowie ein dediziertes Embedding-Modell für die Merkmalsextraktion – bilden sie eine vollständige Multi-Kamera-Fahrzeugabgleich-Pipeline. Dies ermöglicht es, dasselbe Fahrzeug zuzuordnen, während es sich durch ein größeres Kameranetzwerk bewegt.
In einer kürzlich durchgeführten Studie verwendeten Forscher beispielsweise ein leichtgewichtiges YOLO11-Modell als Fahrzeugdetektor in einem Online-Multi-Kamera-Tracking-System. Die Studie ergab, dass die Verwendung von YOLO11 dazu beitrug, die Erkennungszeit zu reduzieren, ohne die Genauigkeit zu beeinträchtigen, was die Gesamtleistung des nachgelagerten Trackings und des kameraübergreifenden Abgleichs verbesserte.

Abb. 3. YOLO11-basiertes Multi-Fahrzeug-Tracking und Re-Identifizierung über mehrere Kameras hinweg. (Quelle)
Link to this sectionDeep Learning-basierte Architekturen für Fahrzeug-Re-ID#
Nachdem wir nun ein besseres Verständnis davon haben, wie Ultralytics YOLO Modelle die Fahrzeug-Re-Identifizierung unterstützen können, werfen wir einen genaueren Blick auf die Deep Learning-Modelle, die die Schritte der Merkmalsextraktion und des Abgleichs handhaben. Diese Modelle sind dafür verantwortlich, zu lernen, wie Fahrzeuge aussehen, robuste Embeddings zu erstellen und zwischen visuell ähnlichen Fahrzeugen über verschiedene Kameraansichten hinweg zu unterscheiden.
Hier sind einige Beispiele für die wichtigsten Deep Learning-Komponenten, die in Objekt-Re-Identifizierungssystemen verwendet werden:
-
Feature extraction mit CNNs: Convolutional Neural Networks wie ResNet50 oder ResNet101 erlernen tiefe Merkmale durch Mustererkennung und identifizieren Elemente wie Farbe, Form und Textur, die ein Fahrzeug von einem anderen unterscheiden. Diese erlernten Muster werden dann in Embeddings umgewandelt, die als eindeutige digitale Repräsentation des Fahrzeugs fungieren.
-
Attention mechanisms und Transformer: Attention-Netzwerke und -Layer, einschließlich räumlicher Aufmerksamkeit, können dabei helfen, wichtige Bereiche eines Fahrzeugs hervorzuheben, wie Scheinwerfer, Fenster oder Kennzeichenbereiche. Räumliche Aufmerksamkeit fokussiert das Modell darauf, wo die informativsten visuellen Hinweise zu finden sind, während Transformer-basierte Modelle wie Vision Transformers (ViT) globale Zusammenhänge über das gesamte Bild hinweg erfassen. Zusammen verbessern sie die feinmaschige Genauigkeit, wenn Fahrzeuge sehr ähnlich aussehen.
-
Teil-basierte und Multi-Branch-Netzwerke: Einige Re-ID-Modelle analysieren spezifische Fahrzeugbereiche separat, wie das Dach, die Rücklichter oder die Seitenteile, und kombinieren dann die Ergebnisse. Das bedeutet, dass das System robust bleibt, selbst wenn Fahrzeuge teilweise verdeckt sind oder aus schwierigen Winkeln betrachtet werden.
Zusätzlich zu diesen Architekturkomponenten spielt Metrik-Lernen eine Schlüsselrolle beim Training von Fahrzeug-Re-ID-Modellen. Verlustfunktionen wie Triplet-Loss, Contrastive-Loss und Cross-Entropy-Loss helfen dem System, starke, diskriminative Embeddings zu erlernen, indem Bilder desselben Fahrzeugs zusammengeführt werden, während unterschiedliche Fahrzeuge voneinander weg bewegt werden.
Link to this sectionBeliebte Fahrzeug-Re-Identifizierungsdatensätze und Benchmarks#
In der Computer-Vision-Forschung hat die Qualität eines Datensatzes einen großen Einfluss darauf, wie gut ein Modell nach dem Einsatz funktioniert. Ein Datensatz liefert die gelabelten Bilder oder Videos, von denen ein Modell lernt.
Für die Fahrzeug-Re-Identifizierung müssen diese hochmodernen Datensätze unterschiedliche Bedingungen wie Lichtverhältnisse, Änderungen des Blickwinkels und Wetterschwankungen erfassen. Diese Vielfalt hilft Modellen, die Komplexität realer Transportumgebungen zu bewältigen.
Hier ist ein Einblick in beliebte Datensätze, die das Training, die Optimierung und die Evaluierung von Fahrzeug-Re-Identifizierungsmodellen unterstützen:
- VeRi-776 dataset: Es ist eine Sammlung von mehr als 50.000 annotierten Fahrzeugbildern, die von 20 Stadtkameras aufgenommen wurden. Die Annotationen umfassen Fahrzeug-ID, Farbe, Modell und Kennzeichenbereiche, was ein detailliertes Merkmalslernen ermöglicht.
- VehicleID dataset: Dieser groß angelegte Datensatz umfasst über 200.000 Bilder, die mehr als 26.000 Fahrzeuge repräsentieren. Er wird oft gewählt, um Skalierbarkeit zu untersuchen und Basisvergleiche zwischen verschiedenen Methoden durchzuführen.
- VeRi-Wild dataset: Er ist darauf ausgelegt, die Variabilität der realen Welt widerzuspiegeln, einschließlich Unterschieden in Blickwinkel, Wetter und teilweiser Verdeckung. Er wird häufig verwendet, um die Robustheit und Generalisierung von Modellen zu bewerten.

Abb. 4. Beispiel von Fahrzeugen im VeRi-776-Datensatz. (Quelle)
Die Modellleistung auf diesen Datensätzen wird üblicherweise unter Verwendung von Metriken wie Mean Average Precision (mAP) und Rank-1- oder Rank-5-Genauigkeit bewertet. mAP misst, wie genau das Modell alle relevanten Übereinstimmungen für ein gegebenes Fahrzeug abruft, während Rank-1- und Rank-5-Scores angeben, ob die richtige Übereinstimmung ganz oben auf der Ergebnisliste oder innerhalb der ersten paar Vorhersagen erscheint.
Zusammen geben diese Benchmarks Forschern eine konsistente Möglichkeit, verschiedene Ansätze zu vergleichen, und spielen eine wichtige Rolle bei der Entwicklung genauerer und zuverlässigerer Fahrzeug-Re-Identifizierungssysteme für den realen Einsatz.
Link to this sectionAnwendungen der Fahrzeug-Re-Identifizierung#
Nachdem wir nun die Grundlagen behandelt haben, gehen wir einige reale Anwendungsfälle durch, bei denen Fahrzeug-Re-Identifizierung praktische Transport-, Mobilitäts- und Überwachungs-Workflows unterstützt.
Link to this sectionStädtische Verkehrsüberwachung und -beobachtung#
Belebte Stadtstraßen sind ständig voller Bewegung, und Verkehrskameras haben oft Schwierigkeiten, dasselbe Fahrzeug zu verfolgen, wenn es sich zwischen verschiedenen Bereichen bewegt. Änderungen im Licht, überfüllte Szenen und Fahrzeuge, die fast identisch aussehen, können dazu führen, dass Identitäten über Kameras hinweg verloren gehen.
Fahrzeug-Re-Identifizierung begegnet dem, indem sie Fahrzeuge klar erkennt, markante Merkmale extrahiert und konsistente IDs selbst in niedrig aufgelöstem oder belebtem Filmmaterial beibehält. Das Ergebnis ist ein flüssigeres, kontinuierliches Tracking über das Netzwerk hinweg, das Verkehrsteams ein klareres Bild davon gibt, wie sich Fahrzeuge durch die Stadt bewegen, und schnellere, fundiertere Reaktionen auf Staus und Vorfälle ermöglicht.
Link to this sectionSmarte Parksysteme#
Smarte Parkeinrichtungen verlassen sich auf eine konsistente Fahrzeugidentifizierung, um Einfahrt, Ausfahrt, Zugangskontrolle und Platzzuweisung zu verwalten. Kameras in diesen Umgebungen erfassen Fahrzeuge jedoch oft aus ungewöhnlichen Winkeln und unter schwierigen Lichtverhältnissen, wie in Tiefgaragen, schattigen Bereichen oder Außenplätzen in der Dämmerung.
Diese Bedingungen erschweren es zu bestätigen, ob dasselbe Fahrzeug in verschiedenen Zonen gesehen wird. Wenn Identitäten inkonsistent sind, können Parkdatensätze abbrechen, die Zugangskontrolle wird weniger zuverlässig und Fahrer können Verzögerungen erleben. Deshalb integrieren viele Smart-Parking-Systeme Fahrzeug-Re-Identifizierungsmodelle, um eine stabile Identität für jedes Fahrzeug zu erhalten, während es sich durch die Einrichtung bewegt.
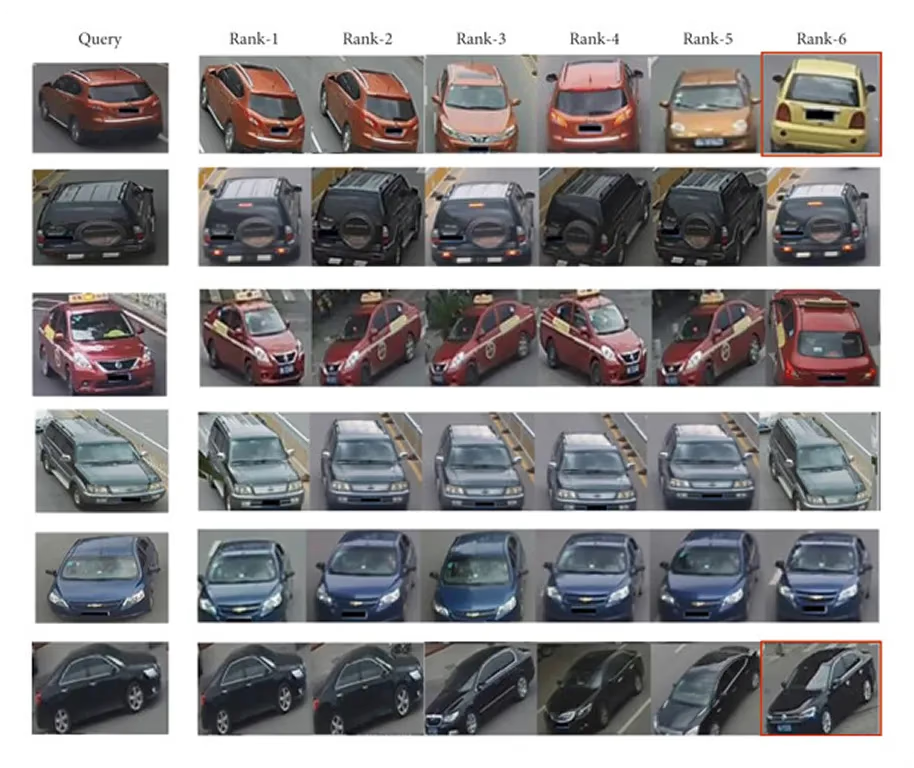
Abb. 5. Ein Beispiel für Fahrzeug-Re-Identifizierung, das links das ausgewählte Fahrzeugbild und rechts die passenden Suchergebnisse zeigt. (Quelle)
Link to this sectionStrafverfolgung und Forensik#
Aufbauend auf der Verkehrsüberwachung spielt Fahrzeug-Re-Identifizierung auch eine wichtige Rolle bei Strafverfolgungs- und forensischen Untersuchungen. In vielen Fällen müssen Beamte ein Fahrzeug über mehrere Kameras verfolgen, aber Kennzeichen können unleserlich, fehlend oder absichtlich verdeckt sein.
Überfüllte Szenen, geringe Sichtbarkeit und teilweise Verdeckungen können dazu führen, dass verschiedene Fahrzeuge täuschend ähnlich aussehen, was eine manuelle Identifizierung langsam und unzuverlässig macht. Fahrzeug-Re-Identifizierung kann verwendet werden, um die Bewegung eines Fahrzeugs über nicht überlappende Kameranetzwerke hinweg nachzuverfolgen, indem seine visuellen Merkmale analysiert werden, anstatt sich ausschließlich auf Kennzeichen zu verlassen.
Das bedeutet, dass Ermittler die Bewegungen eines Fahrzeugs leichter verfolgen, verstehen können, wann es an verschiedenen Orten erschien, und seinen Pfad vor und nach einem Vorfall bestätigen können. KI-gestützte Fahrzeug-Re-ID unterstützt auch Aufgaben wie das Verfolgen verdächtiger Fahrzeuge, das Überprüfen von Vorfall-Filmmaterial oder das Bestimmen, in welche Richtung ein Fahrzeug vor oder nach einem Ereignis fuhr.
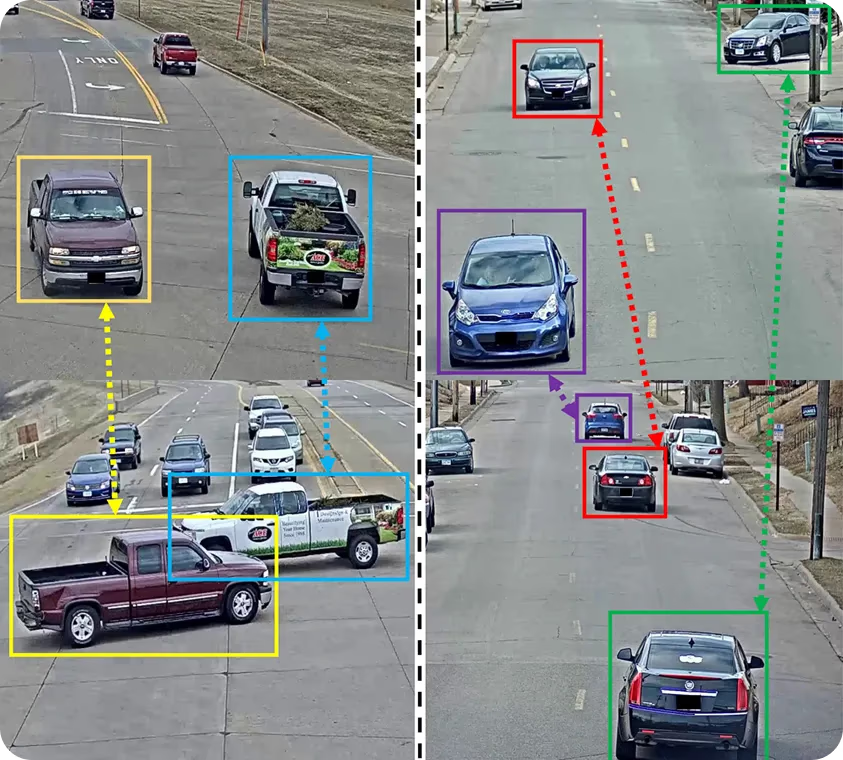
Abb. 6. Fahrzeuge, die über verschiedene Kameras mit unterschiedlichen Perspektiven abgeglichen wurden. (Quelle)
Link to this sectionFlotten- und Logistik-Tracking#
Flotten- und Logistikbetriebe verlassen sich oft auf GPS, RFID-Tags und manuelle Protokolle, um Fahrzeugbewegungen zu verfolgen, aber diese Werkzeuge hinterlassen Lücken in Bereichen, die durch Sicherheits- oder Hofkameras abgedeckt werden, wie Laderampen, Lagerhöfe und interne Straßennetzwerke.
Fahrzeuge bewegen sich häufig zwischen Kameras, die sich nicht überlappen, verschwinden hinter Strukturen oder sehen anderen Fahrzeugen in der Flotte fast identisch ähnlich, was es schwierig macht zu bestätigen, ob dasselbe Fahrzeug an verschiedenen Orten gesehen wurde. Fahrzeug-Re-Identifizierungssysteme können helfen, diese Lücken zu schließen, indem sie visuelle Details und Zeitinformationen analysieren, um eine konsistente Identität für jedes Fahrzeug zu erhalten, während es sich durch die Einrichtung bewegt.
Dies gibt Flottenmanagern ein vollständigeres Bild der Aktivitäten innerhalb ihrer Hubs und unterstützt Aufgaben wie das Überprüfen von Lieferwegen, das Identifizieren ungewöhnlicher Bewegungen und das Sicherstellen, dass Fahrzeuge erwarteten Routen folgen.
Link to this sectionVor- und Nachteile von Fahrzeug-Re-ID-Aufgaben#
Hier sind einige der wichtigsten Vorteile der Verwendung von KI-gestützter Fahrzeug-Re-Identifizierung:
- Reduzierter manueller Arbeitsaufwand: Fahrzeug-Re-ID automatisiert Identitätsabgleichsaufgaben, die sonst eine umfangreiche manuelle Überprüfung erfordern würden, und reduziert so erheblich die Zeit und Mühe, die für die Analyse von Videomaterial benötigt wird.
- Automatisierung und Echtzeit-Einblicke: Durch die Kombination von Erkennung, Tracking und Merkmalsabgleich unterstützt Fahrzeug-Re-ID eine kontinuierliche automatisierte Überwachung und kann Echtzeit-Warnungen für eine schnellere Reaktion auf Vorfälle liefern.
- Skalierbarkeit und Anpassungsfähigkeit: Re-ID-Modelle können sich durch robustes Merkmalslernen, mehrskalige Merkmalsextraktion und invariante Repräsentationen, die unter visuellen Änderungen stabil bleiben, an neue Umgebungen, Lichtverhältnisse oder Kamerawinkel anpassen. Diese Fähigkeiten machen sie für große städtische Netzwerke sowie für kleinere Implementierungen geeignet.
Obwohl Fahrzeug-Re-Identifizierung viele Vorteile bietet, gibt es auch einige Einschränkungen zu berücksichtigen. Hier sind einige Faktoren, die die Zuverlässigkeit in realen Umgebungen beeinflussen:
- Hoher Rechenbedarf: Merkmalsextraktion, Embedding-Generierung und kameraübergreifender Abgleich erfordern erhebliche Rechenleistung, insbesondere bei der Überwachung großer Kameranetzwerke.
- Umweltvariabilität: Faktoren wie nächtliche Beleuchtung, Wetteränderungen, Schatten und Verdeckungen können die Fähigkeit des Modells beeinträchtigen, konsistente Identitäten über Szenen hinweg beizubehalten.
- Datensatz- und Domänenbeschränkungen: Modelle, die auf begrenzten oder idealisierten Datensätzen trainiert wurden, lassen sich möglicherweise ohne weiteres Fein-Tuning oder Domänenanpassung nicht gut auf reale Bedingungen verallgemeinern.
Link to this sectionDer Weg in die Zukunft für Fahrzeug-Re-Identifizierungsmethoden#
Fahrzeug-Re-Identifizierung schreitet weiter voran, während sich die Technologie entwickelt. Aktuelle Veröffentlichungen von IEEE, CVPR und arXiv, zusammen mit Präsentationen auf internationalen Konferenzen, verdeutlichen einen klaren Trend hin zu reichhaltigeren Modellen, die mehrere Datenquellen und fortschrittlicheres Merkmals-Reasoning kombinieren. Zukünftige Arbeiten in diesem Bereich werden sich wahrscheinlich darauf konzentrieren, Systeme aufzubauen, die robuster, effizienter und fähiger sind, reale Variabilität im großen Maßstab zu handhaben.
Ein vielversprechender Ansatz ist zum Beispiel die Verwendung von Transformer-basierten Modellen und Graphen-Aggregationsnetzwerken. Transformer können ein ganzes Bild analysieren und verstehen, wie alle visuellen Details zusammenpassen, was dem System hilft, dasselbe Fahrzeug zu erkennen, selbst wenn sich der Winkel oder das Licht ändert.
Graphbasierte Modelle gehen noch einen Schritt weiter, indem sie verschiedene Fahrzeugteile oder Kameraansichten als verbundene Punkte in einem Netzwerk behandeln. Dies ermöglicht es dem System, die Korrelation zwischen diesen Schlüsselpunkten zu verstehen und bessere Entscheidungen über Fahrzeugidentitäten und diskriminative Merkmale zu treffen.
Ein weiterer wichtiger Fortschritt ist die multi-modale Datenfusion und Merkmalsfusion. Anstatt sich nur auf Bilder zu verlassen, kombinieren neuere Systeme visuelle Informationen mit anderen Multimedia-Signalen, wie etwa GPS-Daten oder Bewegungsmustern von Sensoren. Dieser zusätzliche Kontext erleichtert es dem System, auch dann präzise zu bleiben, wenn Fahrzeuge teilweise verdeckt sind, die Beleuchtung schlecht ist oder sich Kamerawinkel plötzlich ändern.
Link to this sectionWichtige Erkenntnisse#
Die Fahrzeug-Re-Identifizierung entwickelt sich zu einer Schlüsselmethode in intelligenten Verkehrssystemen und hilft Städten dabei, Fahrzeuge zuverlässiger über verschiedene Kameras hinweg zu verfolgen. Dank Fortschritten beim Deep Learning und einer besseren Validierung durch reichhaltigere, vielfältigere Datensätze werden diese Systeme in realen Bedingungen immer genauer und praktischer.
Während sich die Technologie weiterentwickelt, ist es wichtig, Innovation mit verantwortungsvollen Praktiken in Bezug auf Datenschutz, Sicherheit und Ethik in Einklang zu bringen. Insgesamt ebnen diese Fortschritte den Weg für intelligentere, sicherere und effizientere Verkehrsnetzwerke.
Erfahre mehr über KI, indem du unser GitHub-Repository besuchst und unserer Community beitrittst. Besuche unsere Lösungsseiten, um mehr über KI in der Robotik und Computer Vision in der Fertigung zu erfahren. Entdecke unsere Lizenzoptionen, um heute mit Vision AI zu beginnen!






