Videoerkennung im nächtlichen Verkehr: Warum Genauigkeit entscheidend ist
Von schlechter Sicht bis hin zu Blendeffekten – erfahre, was die Genauigkeit der Videoerkennung im nächtlichen Verkehr erschwert und wie Computer Vision die Sicherheit und den Verkehrsfluss verbessert.

Straßen wirken im Dunkeln anders – nicht nur für Fahrer, sondern auch für die Systeme, die für Sicherheit sorgen sollen. Mangelnde Sicht, Blendung durch Scheinwerfer und sich schnell bewegende Reflexionen machen die Fahrzeugerkennung bei Nacht deutlich schwieriger.
Traditionelle Methoden wie manuelle Beobachtung oder bewegungsbasierte Kameras verlassen sich hauptsächlich auf das menschliche Urteilsvermögen und einfache Bewegungshinweise. Bei schlechten Lichtverhältnissen oder komplexen Verkehrsbedingungen ist dies oft unzuverlässig. Diese Methoden können Fahrzeuge oder Fußgänger falsch identifizieren, was zu fehlerhaften Erkennungen oder übersehenen Ereignissen führt.

Abb. 1. Ein Beispiel für eine schlecht beleuchtete Straße bei Nacht (Quelle)
Künstliche Intelligenz (AI), Deep Learning und Computer Vision können diese Lücke schließen, indem sie die Fahrzeugerkennung und -erkennung automatisieren. Computer Vision ist ein Teilbereich der AI, der es Maschinen ermöglicht, visuelle Daten zu sehen und zu interpretieren. Wenn es um die Verkehrsvideodetektion bei Nacht geht, können Vision-AI-Modelle über Helligkeit oder Bewegung hinausgehen und komplexe Muster lernen, die die Genauigkeit verbessern.
Zum Beispiel sind Computer-Vision-Modelle wie Ultralytics YOLO26 und Ultralytics YOLO11 für ihre Geschwindigkeit und Präzision bekannt. Sie können Video- und Bilddaten in Echtzeit verarbeiten, mehrere Objekte innerhalb eines Frames erkennen, klassifizieren und über Sequenzen hinweg verfolgen.
Diese Fähigkeiten werden durch verschiedene Vision-Aufgaben wie Objekterkennung und Instanzsegmentierung ermöglicht, selbst wenn Scheinwerfer, Schatten oder sich überschneidende Fahrzeuge die Erkennung erschweren. Sie ermöglichen es dem Modell, Objekte zu identifizieren, zu klassifizieren und voneinander zu unterscheiden.
In diesem Artikel untersuchen wir die Herausforderungen der nächtlichen Verkehrsüberwachung, sehen, wie Computer Vision diese angeht, und wo Vision AI in realen Verkehrsüberwachungssystemen eingesetzt wird. Fangen wir an!
Link to this sectionHerausforderungen bei der Erkennung bei Nacht#
Bevor wir untersuchen, wie Computer Vision die Herausforderungen der nächtlichen Verkehrserkennung löst, schauen wir uns an, warum das Erkennen von Fahrzeugen nach Einbruch der Dunkelheit so schwierig ist. Hier sind einige Faktoren, die man berücksichtigen sollte:
-
Geringe Sichtbarkeit: Begrenzte Beleuchtung und schlechte Lichtverhältnisse machen es für Kameras schwierig, scharfe, detailreiche Aufnahmen zu machen. Aufgrund der reduzierten Bildqualität können Fahrzeuge mit dem Hintergrund verschmelzen oder ganz falsch identifiziert werden.
-
Wetterbedingungen: Regen, Nebel, Dunst oder sogar Staub können die Videoqualität weiter verschlechtern. Diese Bedingungen machen es für Erkennungssysteme schwieriger, Fahrzeuge von ihrer Umgebung zu unterscheiden.
-
Scheinwerfer und Rücklichter: Helle Lichtkegel und Reflexionen können Kameras überfordern. Dies kann zu einer falschen Fahrzeugerkennung führen, bei der Lichtpunkte für Fahrzeuge gehalten werden, was Erkennungsalgorithmen verwirrt und die Genauigkeit verringert.
-
Verdeckung von Fahrzeugen: Bei dichtem Verkehr können Fahrzeuge hinter anderen teilweise oder vollständig verborgen sein. Verdeckungen erschweren die Fahrzeugverfolgung, Zählung und Klassifizierung, insbesondere wenn sich mehrere Verkehrsteilnehmer in einem einzigen Frame überschneiden.
Link to this sectionDer Bedarf an Benchmark-Datensätzen und Metriken für die Nacht#
Computer-Vision-Modelle werden mithilfe großer Bildsammlungen trainiert, die als Datensätze bezeichnet werden. Diese Datensätze sind sorgfältig mit den darin enthaltenen Objekten wie Autos, Lastwagen, Fußgängern und Fahrrädern beschriftet und dienen als Grundlage für das Training. Durch das Studium dieser beschrifteten Beispiele lernt das Modell, Muster zu erkennen, was es ihm ermöglicht, Objekte in neuem Videomaterial zu identifizieren und zu erkennen.

Abb. 2. Verwendung von Computer Vision zur Erkennung von Fahrzeugen und Fußgängern im Verkehr (Quelle)
Während des Trainings extrahiert das Modell Merkmale aus den Daten und nutzt sie, um die Erkennungsgenauigkeit zu verbessern. Dieser Prozess trägt dazu bei, verpasste Erkennungen und Fehlalarme zu reduzieren, wenn das Modell mit realen Verkehrsszenen konfrontiert wird.
Der Aufbau von Datensätzen oder Datensammlungen für nächtliche Bedingungen ist jedoch wesentlich schwieriger. Die schlechte Videoqualität macht die Beschriftung zeitaufwendig und fehleranfällig. Außerdem können seltene, aber wichtige Ereignisse, wie Unfälle oder ungewöhnliches Fahrverhalten, in nächtlichen Umgebungen schwer zu erfassen sein. Dies führt zu einer begrenzten Anzahl von Trainingsbeispielen, aus denen die Modelle lernen können.
Um dieses Problem anzugehen, haben Forscher spezielle Benchmark-Datensätze entwickelt. Ein Benchmark-Datensatz ist mehr als nur eine Sammlung von Bildern. Er enthält standardisierte Labels, Bewertungsprotokolle und Leistungsmetriken wie Präzision, Recall und Mean Average Precision (mAP). Diese Metriken ermöglichen es, verschiedene Algorithmen unter den gleichen Bedingungen zu testen und zu vergleichen, was eine faire und konsistente Bewertung gewährleistet.
Zum Beispiel enthält der ExDark Benchmark-Datensatz 7.363 Bilder bei schlechten Lichtverhältnissen in 12 Objektkategorien (Fahrrad, Boot, Flasche, Bus, Auto, Katze, Stuhl, Tasse, Hund, Motorrad, Personen, Tisch). Jedes Bild ist mit Bounding Boxes annotiert, und der Datensatz wird in der Forschung häufig verwendet, um die Objekterkennung und Klassifizierung bei schlechter Beleuchtung zu bewerten.
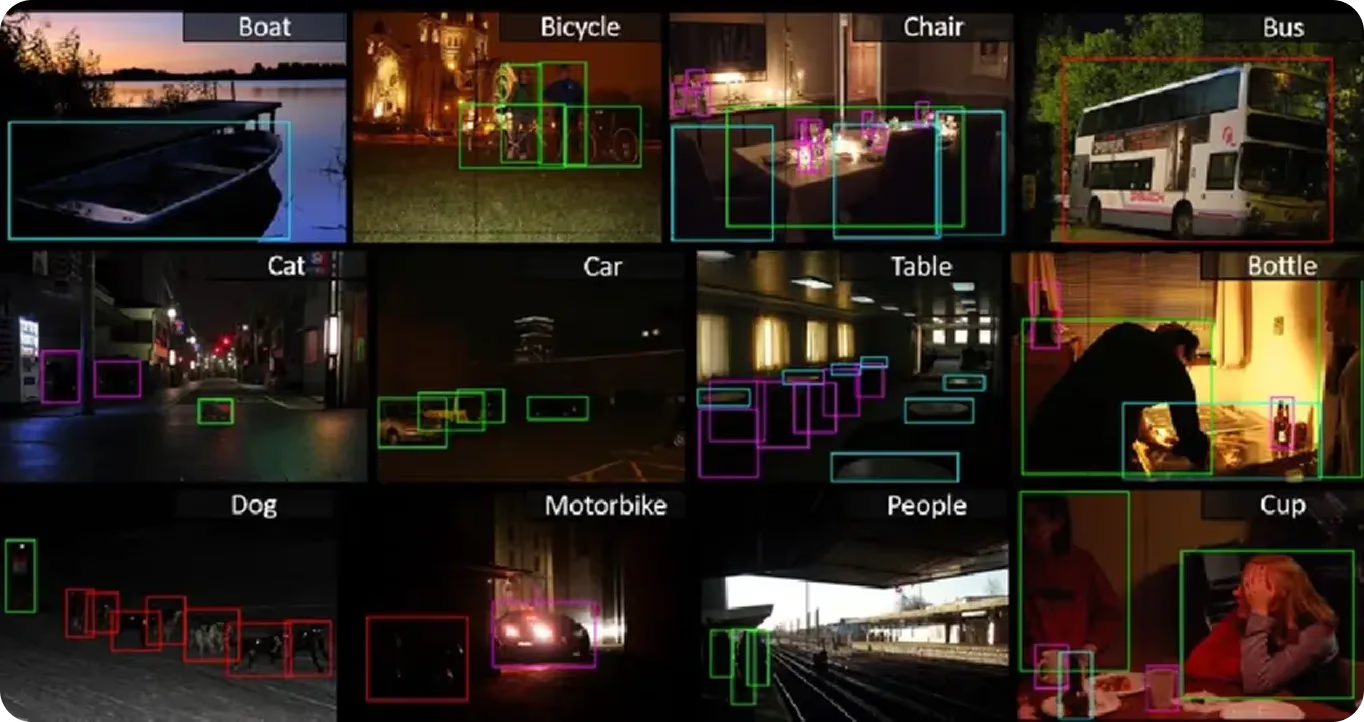
Abb. 3. Ein Einblick in den ExDark Datensatz (Quelle)
Ähnlich bietet der NightOwls Benchmark-Datensatz rund 115.000 Nachtbilder mit etwa 279.000 Fußgänger-Annotationen. Er ist zu einer Schlüsselressource für die Bewertung von Fußgängererkennungssystemen geworden, die eine entscheidende Rolle bei der Verkehrssicherheit und fortschrittlichen Fahrerassistenzsystemen (ADAS) spielen.
Link to this sectionWie Computer Vision bei der Verkehrsvideodetektion bei Nacht hilft#
Da wir nun ein besseres Verständnis der damit verbundenen Herausforderungen und der Notwendigkeit von Datensätzen haben, werfen wir einen genaueren Blick darauf, wie bildbasierte Systeme Nachtverkehrsvideos interpretieren können.
Modelle wie YOLO11 und YOLO26 unterstützen Computer-Vision-Aufgaben wie Objekterkennung, Tracking und Instanzsegmentierung, die es ermöglichen, den Verkehr auch bei schlechten Lichtverhältnissen zu analysieren. Hier ist ein Überblick über die Vision-AI-Aufgaben, die diese Modelle zur Analyse des Nachtverkehrs unterstützen:
- Objekterkennung: Diese Aufgabe kann verwendet werden, um Fahrzeuge, Fußgänger, Fahrräder und andere Verkehrsteilnehmer in jedem Frame zu identifizieren und zu lokalisieren, normalerweise durch das Zeichnen von Bounding Boxes um sie herum.
- Objekt-Tracking: Es hilft dabei, erkannte Objekte über Frames hinweg zu verfolgen, sodass dasselbe Fahrzeug oder derselbe Fußgänger über die Zeit hinweg wiedererkannt werden kann, was es ermöglicht, die Fahrzeuggeschwindigkeit zu schätzen und den Verkehrsfluss zu überwachen.
- Instanzsegmentierung: Sie kann einzelne Objekte unterscheiden, selbst wenn sie sich überschneiden, und liefert Pixel-genaue Details, die die Genauigkeit bei komplexen nächtlichen Bedingungen verbessern.
- Bildklassifizierung: Diese Aufgabe weist ein ganzes Bild oder ein erkanntes Objekt einer vordefinierten Kategorie zu, wie Auto, Bus, LKW oder Motorrad.
- Oriented Bounding Box (OBB) Detektion: Erfasst den genauen Winkel und die Ausrichtung eines Objekts, was die Genauigkeit verbessert, wenn Fahrzeuge im Nachtverkehr diagonal oder in ungewöhnlichen Positionen erscheinen.
Link to this sectionVerwendung von Ultralytics YOLO-Modellen für die nächtliche Überwachung#
Wir haben das Modelltraining, den Bedarf an Datensätzen und die Aufgaben besprochen, die Modelle wie YOLO11 und YOLO26 unterstützen. Aber um alles zusammenzufügen, gibt es noch ein Konzept, das wir durchgehen müssen: Wie diese Modelle tatsächlich bei der nächtlichen Überwachung angewendet werden.
Ultralytics YOLO-Modelle sind von Haus aus als vortrainierte Versionen erhältlich, was bedeutet, dass sie bereits auf großen Allzweck-Datensätzen trainiert wurden, wie dem COCO-Datensatz, der viele alltägliche Objekte abdeckt. Dies verleiht dem Modell eine starke Grundfähigkeit, Objekte zu erkennen und zu klassifizieren.
Da diese Datensätze jedoch nur sehr wenige Beispiele bei schwachem Licht oder Nacht enthalten, sind die vortrainierten Modelle nicht besonders gut darin, Blendung, Schatten oder schlechten Kontrast effektiv zu bewältigen. Um sie effektiv für die Verkehrsvideodetektion bei Nacht zu machen, müssen sie auf spezialisierten Datensätzen feinabgestimmt werden, die reale nächtliche Bedingungen widerspiegeln.
Das Fine-Tuning oder benutzerdefinierte Training umfasst das Training des Modells mit zusätzlichen beschrifteten Bildern, die bei schlechten Lichtverhältnissen aufgenommen wurden – wie Fahrzeuge bei Scheinwerferblendung, Fußgänger an Zebrastreifen oder überfüllte Kreuzungen bei Nacht –, sodass es die einzigartigen Merkmale von Nachtszenen lernt.
Sobald das Modell benutzerdefiniert trainiert ist, kann es Aufgaben wie Erkennung, Tracking, Segmentierung oder Klassifizierung bei schlechten Lichtverhältnissen mit wesentlich höherer Genauigkeit unterstützen. Dies ermöglicht es Verkehrsbehörden, solche Modelle für praktische Anwendungsfälle wie Fahrzeugzählung, Geschwindigkeitsschätzung, adaptive Signalsteuerung und Unfallprävention bei Nacht einzusetzen.
Link to this sectionVision-AI-Anwendungen für die Verkehrsvideodetektion bei Nacht#
Als nächstes schauen wir uns an, wie Computer Vision in realen Nachtverkehrssystemen eingesetzt werden kann.
Link to this sectionIntelligente Ampeln können eine smarte Stadtplanung unterstützen#
Städtische Kreuzungen gehören zu den am schwierigsten zu verwaltenden Bereichen, besonders nachts, wenn die Sicht nachlässt und der Verkehrsfluss weniger vorhersehbar wird. Herkömmliche Signale verlassen sich auf feste Timer, die nicht auf Änderungen in Echtzeit reagieren können. Untersuchungen zeigen, dass dies nicht nur Zeit für Autofahrer verschwendet, sondern auch zu unnötigem Kraftstoffverbrauch und Verzögerungen führt.
Genau hier können Computer-Vision-Systeme helfen, diese Herausforderung zu meistern. Diese Systeme können Fahrzeugbewegungen überwachen und die Anzahl der Fahrzeuge in Echtzeit erfassen. Die Daten werden dann in adaptive Verkehrssteuerungssysteme eingespeist. Dies ermöglicht es Signalen, schnell auf tatsächliche Straßenverhältnisse zu reagieren. Wenn also eine Spur überfüllt ist, während eine andere leer ist, kann die Signaltaktung sofort angepasst werden, um Engpässe zu beseitigen.
Link to this sectionUnfallprävention#
Nachtfahrten sind riskanter als Fahrten am Tag, da reduzierte Sicht, ungleichmäßige Beleuchtung und Blendung es für Fahrer schwieriger machen, Entfernungen einzuschätzen. Tatsächlich zeigen Studien, dass die Rate tödlicher Unfälle pro Kilometer bei Nacht bis zu dreimal höher sein kann als bei Tageslicht.
Herkömmliche Überwachungsmethoden, wie fest installierte Überwachungskameras, Straßenpatrouillen, Fahrzeugpräsenzsensoren und zeitgesteuerte Signalsysteme, arbeiten reaktiv und können gefährliche Situationen unter Umständen nicht frühzeitig erkennen, bevor sie eintreten.
Computer-Vision-Lösungen können dieses Problem lösen, indem sie Live-Videostreams analysieren und ungewöhnliche Muster auf der Straße oder Autobahn erkennen. Mithilfe von Objekt-Tracking können diese Systeme das Fahrzeugverhalten in Echtzeit überwachen und Alarme auslösen, wenn etwas ungewöhnlich erscheint.
Wenn beispielsweise ein fahrendes Fahrzeug die Spur wechselt, in einem überlasteten Bereich zu schnell fährt oder plötzlich abbremst, kann das System dies in Echtzeit markieren. Das bedeutet, dass Behörden schnell reagieren und Unfälle verhindern können, bevor sie geschehen.
Link to this sectionAutonomes Fahren und ADAS#
Für autonome Fahrzeuge und ADAS bringt nächtliches Fahren eigene Herausforderungen mit sich. Geringe Sichtbarkeit und unvorhersehbare Verkehrsmuster machen es für herkömmliche Sensoren schwieriger, zuverlässig zu arbeiten, was Sicherheitsbedenken aufwirft.
Computer Vision verbessert diese Systeme durch die Handhabung von Aufgaben wie Objekterkennung, Spurverfolgung und Segmentierung, wodurch Fahrzeuge in der Lage sind, Fußgänger, andere Autos und Hindernisse selbst bei schlechten Lichtverhältnissen zu erkennen. In Kombination mit Radar oder LiDAR (Light Detection and Ranging), die die Umgebung in 3D kartieren, hilft die zusätzliche visuelle Ebene dabei, ADAS mit Frühwarnungen zu versehen und autonomen Fahrzeugen das nötige Bewusstsein zu geben, um bei Nacht sicherer zu navigieren.

Abb. 4. Fahrzeugaufnahmen bei Tag- und Nachtbedingungen (Quelle)
Link to this sectionStrafverfolgung und Verstößenerkennung#
Geschwindigkeitsüberschreitung ist weltweit für jeden dritten Verkehrstoten verantwortlich, und das Risiko verschlimmert sich bei Nacht. Dunkelheit macht es für die Verkehrspolizei schwieriger, Verstöße zu erfassen, da Details, die bei Tageslicht klar sind, nach Einbruch der Dunkelheit oft verschwimmen.
Deshalb bleiben Verstöße wie Raserei auf leeren Straßen, Überfahren roter Ampeln oder unbeabsichtigtes Abweichen von der Fahrspur oft ungeahndet. Computer Vision geht dieses Problem an, indem Infrarotkameras verwendet werden, um Verstöße selbst bei schlechten Lichtverhältnissen zu erkennen. Diese Systeme erstellen Erkennungszonen, in denen Vorfälle aufgezeichnet werden, was Fehlalarme reduziert und klare, überprüfbare Beweise liefert. Für Verkehrsbehörden bedeutet dies weniger tote Winkel und eine geringere Abhängigkeit von manuellen Kontrollen.
Link to this sectionVor- und Nachteile der nächtlichen Verkehrsvideodetektion#
Hier sind einige Vorteile der Verwendung von Vision AI für die nächtliche Verkehrsvideodetektion.
- Skalierbarkeit: Einmal feinabgestimmt, können Modelle über viele Kameras oder Kreuzungen hinweg eingesetzt werden und so eine stadtweite Überwachung unterstützen.
- Prädiktive Analytik: Historische Videodaten können verwendet werden, um Staus und unfallträchtige Zonen vorherzusagen, was präventive Maßnahmen unterstützt.
- Ressourcenoptimierung: Es bietet Behörden Echtzeit-Einblicke, die dabei helfen, Straßenpatrouillen und Rettungsdienste effizienter einzusetzen.
Trotz der Vorteile bringt die nächtliche Verkehrserkennung mittels Vision AI auch bestimmte Einschränkungen mit sich. Hier sind einige Faktoren, die man beachten sollte:
-
Datenabhängigkeit: Die Genauigkeit von Vision-AI-Systemen hängt stark vom Zugriff auf große, hochwertige Datensätze ab, die eine breite Palette von nächtlichen Bedingungen erfassen.
-
Umweltbedingungen: Wetterfaktoren wie Regen, Nebel oder Dunst sowie praktische Probleme wie verschmutzte oder falsch ausgerichtete Kameralinsen können die Erkennungsleistung verringern und erfordern regelmäßige Wartung.
-
Hardware-Anforderungen: Das Ausführen fortschrittlicher AI-Modelle erfordert oft leistungsstarke GPUs oder spezialisierte Edge-Geräte, was den großflächigen Einsatz kostspielig und komplex machen kann.
Link to this sectionDer Weg in die Zukunft für intelligente Transportsysteme bei Nacht#
Da Städte wachsen und Straßen voller werden, bewegt sich die nächtliche Verkehrserkennung hin zu intelligenteren und reaktionsschnelleren Systemen. Zum Beispiel können Wärmebildkameras und Infrarotsensoren Wärmesignaturen von Personen und Fahrzeugen erkennen, wodurch es möglich wird, selbst bei völliger Dunkelheit zu sehen. Dies reduziert Fehler, die auftreten, wenn Standardkameras mit Blendung oder wenig Licht zu kämpfen haben.

Abb. 5. Nachtsichttechnologie verbessert die Fußgängererkennung bei Nacht (Quelle)
Ein weiterer wachsender Ansatz ist die Kamera-LiDAR-Fusion. Kameras liefern detaillierte Bilder der Straße, während LiDAR eine präzise 3D-Karte generiert. Zusammen verbessern sie die Genauigkeit bei der Erkennung von Fahrspuren, Fahrzeugen und Hindernissen, insbesondere bei schwachem Licht oder leichtem Nebel.
Gleichzeitig erweitern Fortschritte bei der Bildverbesserung bei schwachem Licht, der Fußgängererkennung und der Kennzeichenidentifikation die Möglichkeiten von Computer Vision. Mit diesen Verbesserungen können selbst schlecht beleuchtete Straßen und Kreuzungen mit größerer Zuverlässigkeit und weniger Fehlern überwacht werden.
Link to this sectionWichtige Erkenntnisse#
Die Erkennung von Fahrzeugen bei Nacht war schon immer eine Herausforderung für die Verkehrsüberwachung, aber Computer Vision macht sie handhabbarer. Indem die Auswirkungen von Blendung reduziert und komplexe Verkehrsszenen bewältigt werden, wird ein genaueres Bild davon vermittelt, wie sich Straßen nach Einbruch der Dunkelheit verhalten. Während sich diese Systeme weiterentwickeln, ebnen sie den Weg für einen sichereren, intelligenteren und effizienteren Transport bei Nacht.
Bist du bereit, Vision AI in deine Projekte zu integrieren? Werde Teil unserer aktiven Community und entdecke Innovationen wie AI in der Automobilindustrie und Vision AI in der Robotik. Besuche unser GitHub-Repository, um mehr zu erfahren. Um heute mit Computer Vision zu beginnen, sieh dir unsere Lizenzoptionen an.






