3D 객체 탐지에 대한 이해와 응용 분야
2D 및 3D 객체 탐지의 작동 방식과 주요 차이점, 그리고 자율 주행 자동차, 로봇 공학 및 증강 현실과 같은 분야에서의 응용 사례를 살펴보세요.

지난 수년간 객체 탐지 기술은 점점 더 고도화되었습니다. 단순한 2차원(2D) 이미지에서 객체를 인식하는 수준을 넘어, 우리 주변의 복잡한 3차원(3D) 세계에서 객체를 식별하는 단계로 발전했습니다. 1970년대에 개발된 템플릿 매칭과 같은 초기 기술은 이미지의 일부를 저장된 참조 이미지와 비교하여 객체를 찾는 방식이었으며, 이는 2D 객체 탐지의 기반이 되었습니다. 1990년대에는 LIDAR(Light Detection and Ranging)와 같은 기술이 도입되면서 시스템이 깊이와 공간 정보를 더 쉽게 포착할 수 있게 되었습니다. 오늘날 2D 이미지와 3D 데이터를 결합한 멀티모달 퓨전 방식은 매우 정확한 3D 객체 탐지 시스템의 길을 열었습니다.
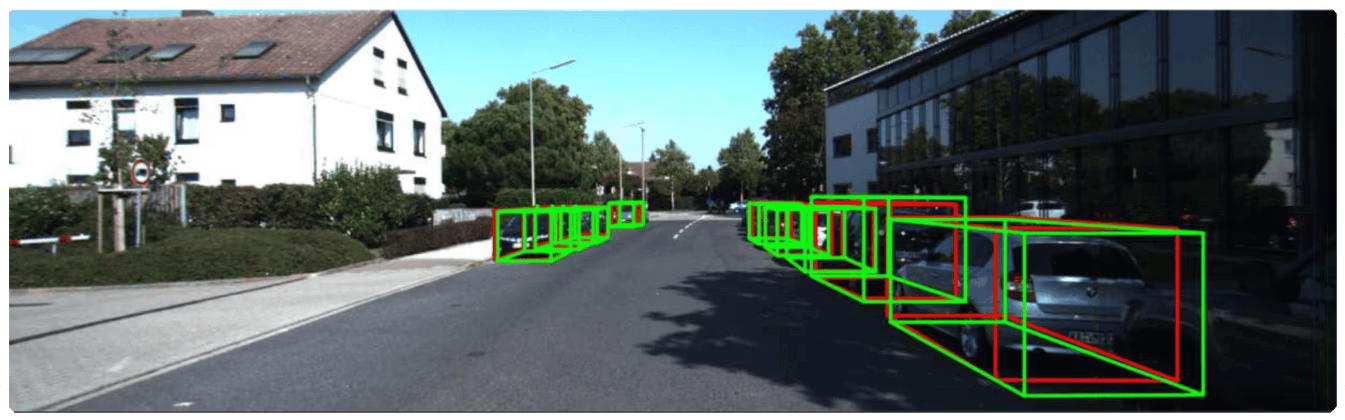
그림 1. 3D 객체 탐지의 예시.
본 글에서는 3D 객체 탐지가 무엇인지, 어떻게 작동하는지, 그리고 2D 객체 탐지와 어떻게 다른지 살펴보겠습니다. 또한 3D 객체 탐지의 몇 가지 응용 분야에 대해서도 논의하겠습니다. 시작해 보겠습니다!
Link to this section2D 객체 탐지 개요#
3D 객체 탐지를 살펴보기 전에, 먼저 2D 객체 탐지가 어떻게 작동하는지 이해해 보겠습니다. 2D 객체 탐지는 컴퓨터가 평평한 2차원 이미지 내에서 객체를 인식하고 위치를 파악할 수 있게 하는 컴퓨터 비전 기술입니다. 이는 사진 속 객체의 수평(X) 및 수직(Y) 위치를 분석하여 작동합니다. 예를 들어, 축구 경기장의 선수들 이미지를 Ultralytics YOLOv8과 같은 2D 객체 탐지 모델에 입력하면, 모델은 이미지를 분석하고 각 객체(이 경우 선수들) 주위에 바운딩 박스(bounding box)를 그려 그들의 위치를 정밀하게 식별합니다.
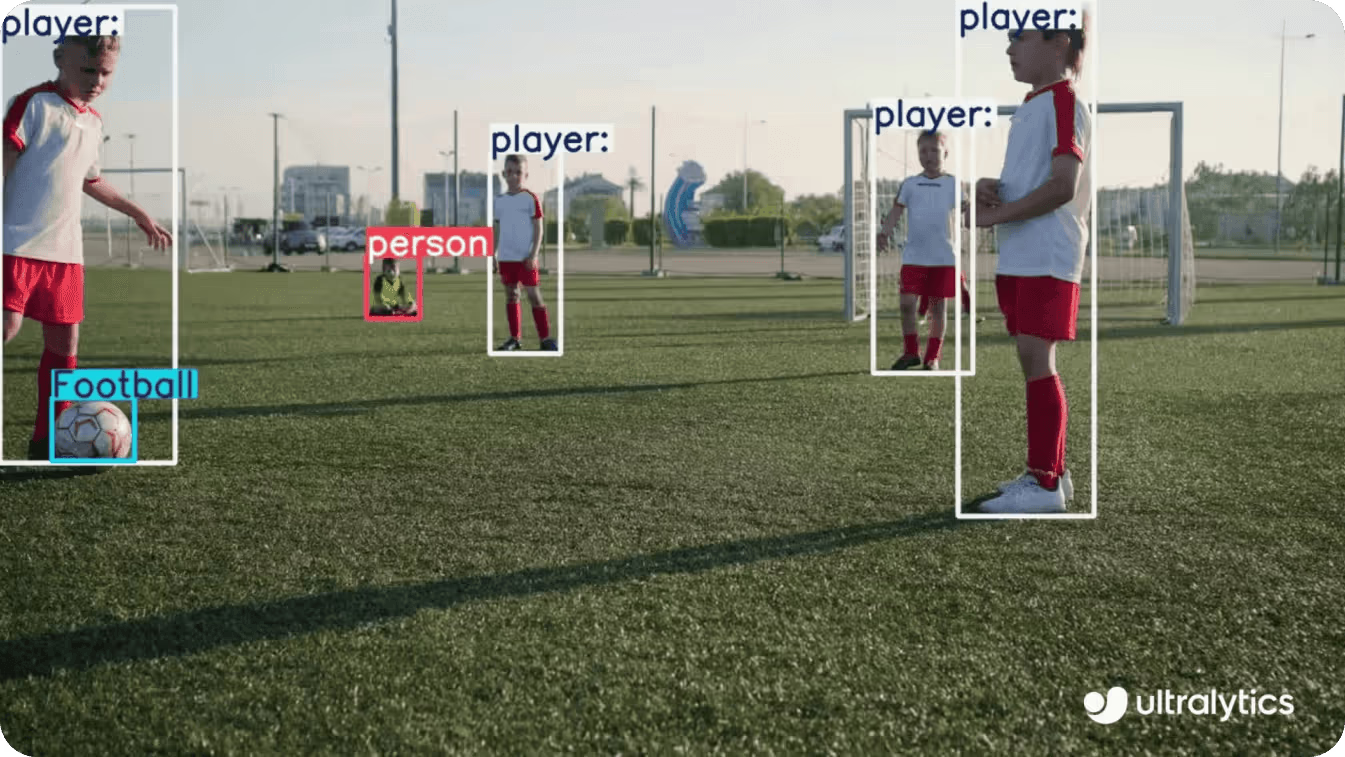
그림 2. 축구 경기장의 선수들을 탐지하는 데 사용되는 YOLOv8 2D 객체 탐지.
하지만 2D 객체 탐지에는 한계가 있습니다. 2차원만을 고려하기 때문에 깊이를 이해하지 못합니다. 이로 인해 객체가 얼마나 멀리 있는지, 혹은 얼마나 큰지 판단하기 어려울 수 있습니다. 예를 들어, 멀리 있는 큰 객체가 더 가까이 있는 작은 객체와 같은 크기로 보일 수 있어 혼란을 줄 수 있습니다. 깊이 정보의 부족은 객체의 실제 크기와 거리를 아는 것이 필수적인 로봇 공학이나 증강 현실과 같은 응용 분야에서 부정확성을 야기할 수 있습니다. 바로 이 지점에서 3D 객체 탐지의 필요성이 대두됩니다.
Link to this section3D 객체 탐지를 통한 공간 인식 확보#
3D 객체 탐지는 컴퓨터가 3차원 공간에서 객체를 식별할 수 있게 하여 주변 세계에 대한 훨씬 더 깊은 이해를 제공하는 고급 컴퓨터 비전 기술입니다. 2D 객체 탐지와 달리 3D 객체 탐지는 깊이 데이터도 고려합니다. 깊이 정보는 객체의 위치, 크기, 거리, 그리고 실제 3D 세계에서의 배치 상태와 같은 더 많은 상세 정보를 제공합니다. 흥미롭게도 3D 탐지는 한 객체가 다른 객체를 부분적으로 가리는 상황(가림 현상, occlusions)을 더 잘 처리할 수 있으며, 시점이 바뀌어도 안정성을 유지합니다. 이는 정밀한 공간 인식이 필요한 사용 사례를 위한 강력한 도구입니다.
3D 객체 탐지는 자율주행 자동차, 로봇 공학, 그리고 증강 현실 시스템과 같은 응용 분야에 필수적입니다. 이는 LiDAR나 스테레오 카메라와 같은 센서를 사용하여 작동합니다. 이러한 센서들은 포인트 클라우드(point cloud) 또는 깊이 맵(depth map)이라고 알려진 환경의 상세한 3D 지도를 생성합니다. 이후 이 지도들을 분석하여 3D 환경 내의 객체를 탐지합니다.
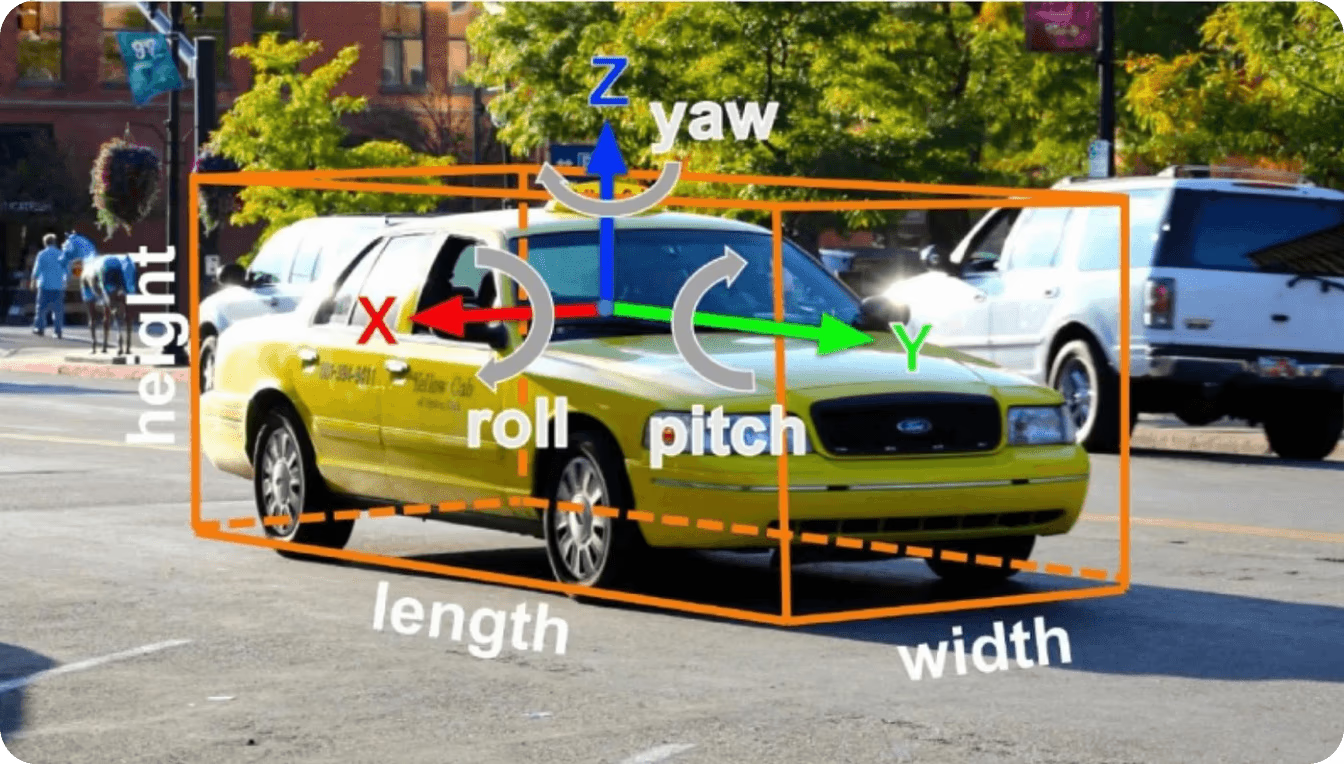
그림 3. 자동차의 3D 객체 탐지.
포인트 클라우드와 같은 3D 데이터를 처리하기 위해 특별히 설계된 많은 고급 컴퓨터 비전 모델이 존재합니다. 예를 들어, VoteNet은 허프 투표(Hough voting) 방식을 사용하여 포인트 클라우드에서 객체의 중심 위치를 예측함으로써 객체를 더 정확하게 탐지하고 분류할 수 있게 해주는 모델입니다. 유사하게, VoxelNet은 데이터 분석을 간소화하기 위해 포인트 클라우드를 복셀(voxel)이라 불리는 작은 정육면체 격자로 변환하는 모델입니다.
Link to this section2D 및 3D 객체 탐지의 주요 차이점#
이제 2D 및 3D 객체 탐지에 대해 이해했으니, 그 주요 차이점을 살펴보겠습니다. 3D 객체 탐지는 포인트 클라우드를 다루기 때문에 2D 객체 탐지보다 더 복잡합니다. LiDAR가 생성하는 포인트 클라우드와 같은 3D 데이터를 분석하려면 훨씬 더 많은 메모리와 컴퓨팅 성능이 필요합니다. 또 다른 차이점은 관련된 알고리즘의 복잡성입니다. 3D 객체 탐지 모델은 깊이 추정, 3D 형태 분석, 객체의 방향 분석을 수행할 수 있도록 더욱 복잡해야 합니다.
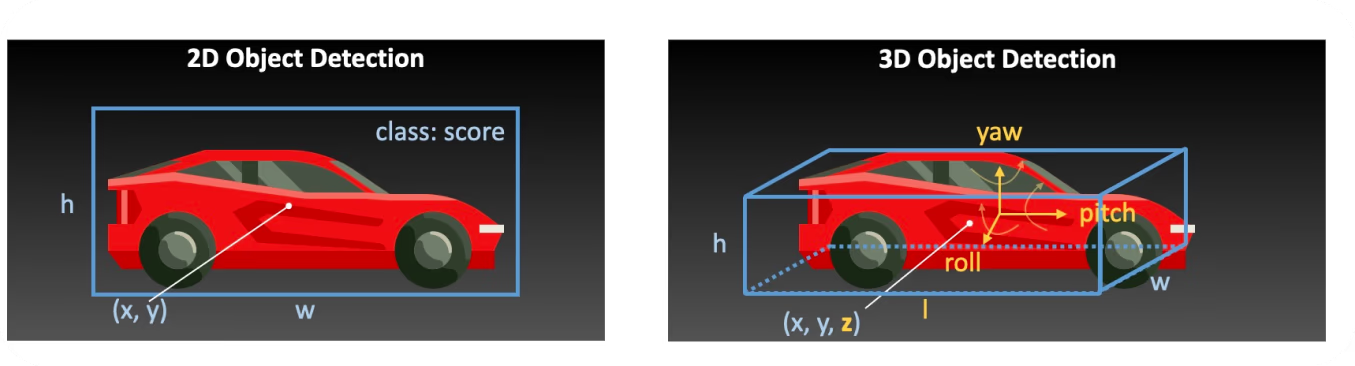
그림 4. 2D vs 3D 객체 탐지.
3D object detection models involve heavier mathematical and computational work than 2D object detection models. Processing 3D data in real-time can be challenging without advanced hardware and optimizations. However, these differences make 3D object detection more suited for applications requiring better spatial understanding. On the other hand, 2D object detection is often used for simpler applications like security systems that need image recognition or video analysis.
Link to this section3D 객체 탐지의 장단점#
3D 객체 탐지는 전통적인 2D 객체 탐지 방식과 차별화되는 몇 가지 장점을 제공합니다. 객체의 세 가지 차원을 모두 포착함으로써 실제 세계를 기준으로 객체의 위치, 크기, 방향에 대한 정밀한 세부 정보를 제공합니다. 이러한 정밀도는 장애물의 정확한 위치 파악이 안전에 직결되는 자율주행 자동차와 같은 응용 분야에 매우 중요합니다. 3D 객체 탐지 사용의 또 다른 장점은 3D 공간에서 여러 객체가 서로 어떤 관계를 맺고 있는지 훨씬 더 잘 이해하는 데 도움을 준다는 점입니다.
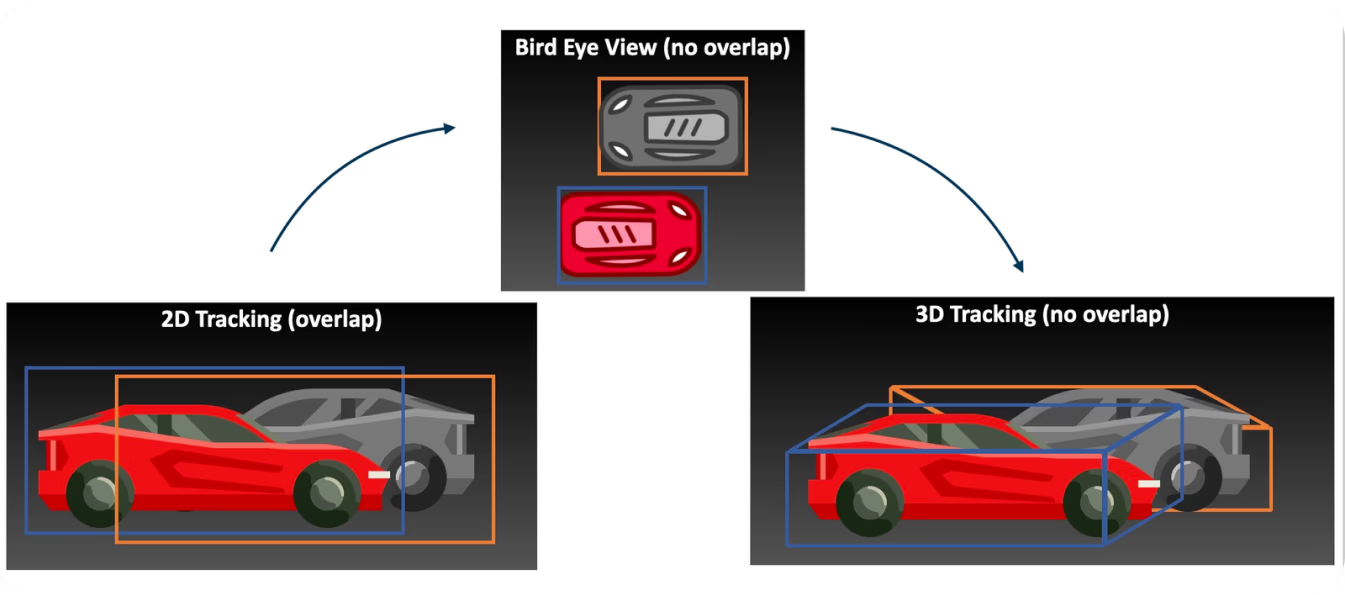
그림 5. 3D 객체 탐지를 통한 가림 현상 해결.
많은 이점에도 불구하고 3D 객체 탐지에는 몇 가지 한계가 있습니다. 다음은 기억해야 할 주요 도전 과제입니다:
- 더 높은 컴퓨팅 비용: 3D 데이터를 작업하려면 더 강력한 하드웨어 자원이 필요하며, 비용이 빠르게 증가할 수 있습니다.
- 더 복잡한 데이터 요구사항: 3D 객체 탐지는 종종 LiDAR와 같은 고급 센서에 의존하는데, 이는 비용이 많이 들고 모든 환경에서 가용하지 않을 수 있습니다.
- 데이터 수집 및 처리: 3D 객체 탐지의 복잡한 데이터 요구사항으로 인해 모델 학습에 필요한 대규모 데이터 세트를 수집, 준비 및 처리하는 작업은 시간과 자원이 많이 소요됩니다.
- 모델 복잡성 증가: 3D 객체 탐지에 사용되는 모델은 일반적으로 2D 객체 탐지 모델보다 레이어와 파라미터가 더 많아 더 복잡합니다.
Link to this section3D 객체 탐지의 응용 분야#
이제 3D 객체 탐지의 장단점에 대해 논의했으니, 3D 객체 탐지의 사용 사례를 좀 더 자세히 살펴보겠습니다.
Link to this section자율주행 차량#
자율주행 자동차에서 3D 객체 탐지는 차량 주변을 인식하는 데 매우 중요합니다. 이를 통해 차량은 보행자, 다른 차량, 장애물을 감지할 수 있습니다. 또한 실제 세계에서의 위치, 크기, 방향에 대한 정밀한 정보를 제공합니다. 3D 객체 탐지 시스템을 통해 얻은 상세 데이터는 탑승객을 위해 훨씬 더 안전한 자율주행 경험을 제공하는 데 도움이 됩니다.
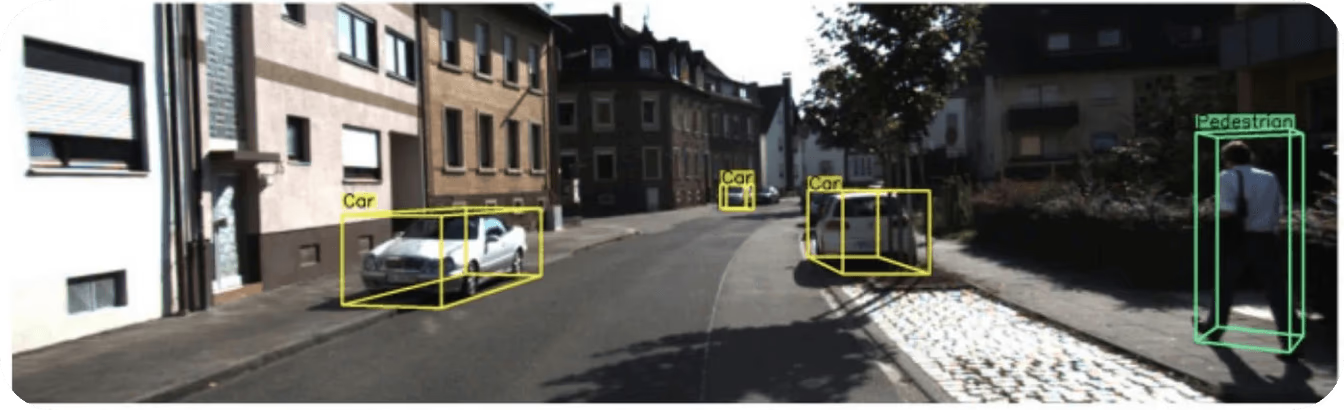
그림 6. 자율주행 차량에서의 3D 객체 탐지 활용. (출처: towardsdatascience.com)
Link to this section로봇 공학#
로봇 시스템은 여러 응용 분야에서 3D 객체 탐지를 사용합니다. 로봇은 다양한 유형의 환경을 탐색하고, 객체를 집어 옮기며, 주변 환경과 상호작용하기 위해 이를 사용합니다. 이러한 사용 사례는 로봇이 효과적으로 작동하기 위해 3차원 레이아웃을 이해해야 하는 창고나 제조 시설과 같은 역동적인 환경에서 특히 중요합니다.
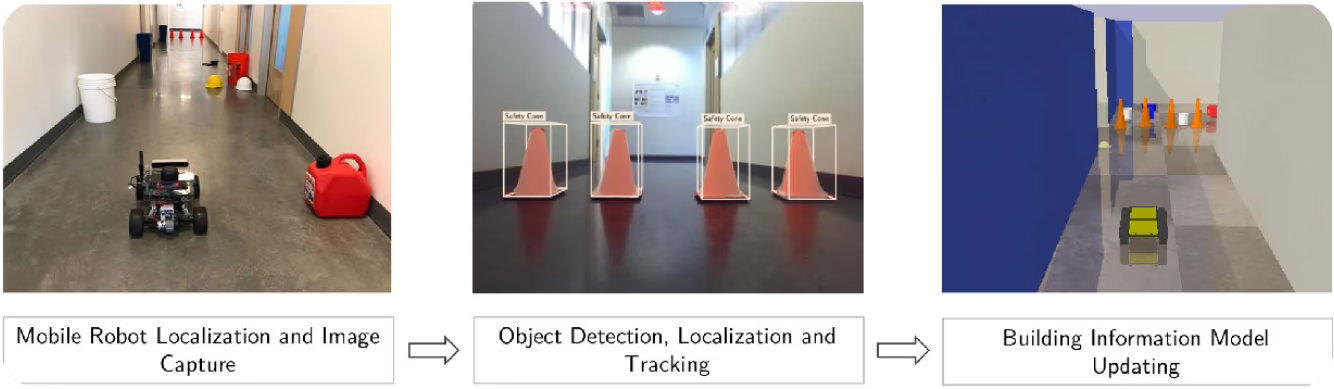
그림 7. 3D 객체 탐지를 사용하는 이동식 로봇.
Link to this section증강 및 가상 현실 (AR/VR)#
3D 객체 탐지의 또 다른 흥미로운 사용 사례는 증강 현실 및 가상 현실 응용 분야입니다. 3D 객체 탐지는 현실적인 VR 또는 AR 환경에 가상 객체를 정확하게 배치하는 데 사용됩니다. 이를 통해 이러한 기술의 전반적인 사용자 경험이 향상됩니다. 또한 VR/AR 시스템이 물리적 객체를 인식하고 추적하여 디지털 요소와 물리적 요소가 원활하게 상호작용하는 몰입형 환경을 생성할 수 있게 합니다. 예를 들어, AR/VR 헤드셋을 사용하는 게이머들은 3D 객체 탐지의 도움으로 훨씬 더 몰입감 있는 경험을 할 수 있습니다. 이는 3D 공간 내 가상 객체와의 상호작용을 훨씬 더 매력적으로 만듭니다.
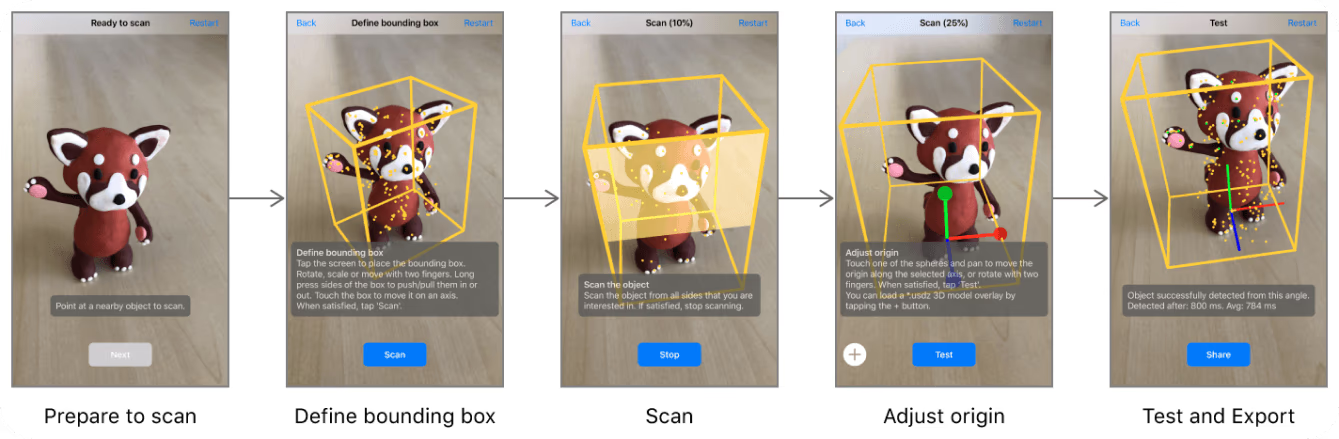
그림 8. AR 응용 분야에 사용되는 3D 객체 인식의 예시.
Link to this section3D 객체 탐지에 대한 최종 생각#
3D 객체 탐지는 시스템이 2D 객체 탐지 방식보다 더 효과적으로 깊이와 공간을 이해할 수 있게 합니다. 이 기술은 객체의 크기, 거리, 위치를 파악하는 것이 중요한 자율주행 자동차, 로봇, AR/VR과 같은 응용 분야에서 핵심적인 역할을 합니다. 3D 객체 탐지는 더 많은 처리 능력과 복잡한 데이터를 필요로 하지만, 정확하고 상세한 정보를 제공하는 능력 덕분에 많은 분야에서 매우 가치 있는 도구로 자리 잡았습니다. 기술이 발전함에 따라 3D 객체 탐지의 효율성과 접근성은 개선될 것이며, 이는 다양한 산업 전반에 걸쳐 더 폭넓은 채택과 혁신의 길을 열어줄 것입니다.
저희 커뮤니티와 연결하여 최신 AI 소식을 받아보세요! 저희 GitHub 저장소를 방문하여 제조업 및 의료업과 같은 산업에서 AI를 사용하여 어떻게 최첨단 솔루션을 구축하고 있는지 확인해 보세요. 🚀






