Compreender a deteção de bordas no processamento de imagem
Deteção de bordas no processamento de imagem. Aprende Sobel, Canny e outros algoritmos de deteção de bordas para detetar bordas com precisão e alcançar um reconhecimento robusto de bordas.
Como humanos, reconhecemos naturalmente as bordas de objetos, seguimos suas curvas e notamos as texturas em suas superfícies ao olhar para uma imagem. Para um computador, no entanto, a compreensão começa no nível de pixels individuais.
Um pixel, a menor unidade de uma imagem digital, armazena cor e brilho em um único ponto. Ao rastrear mudanças nesses valores de pixel em uma imagem, um computador pode detectar padrões que revelam detalhes fundamentais.
Em particular, o processamento de imagens usa dados de pixels para enfatizar características essenciais e remover distrações. Uma técnica comum de processamento de imagens é a detecção de bordas, que identifica pontos onde o brilho ou a cor mudam bruscamente para contornar objetos, marcar limites e adicionar estrutura.
Isso permite que computadores separem formas, meçam dimensões e interpretem como as partes de uma cena se conectam. A detecção de bordas é frequentemente o primeiro passo na análise de imagem avançada.
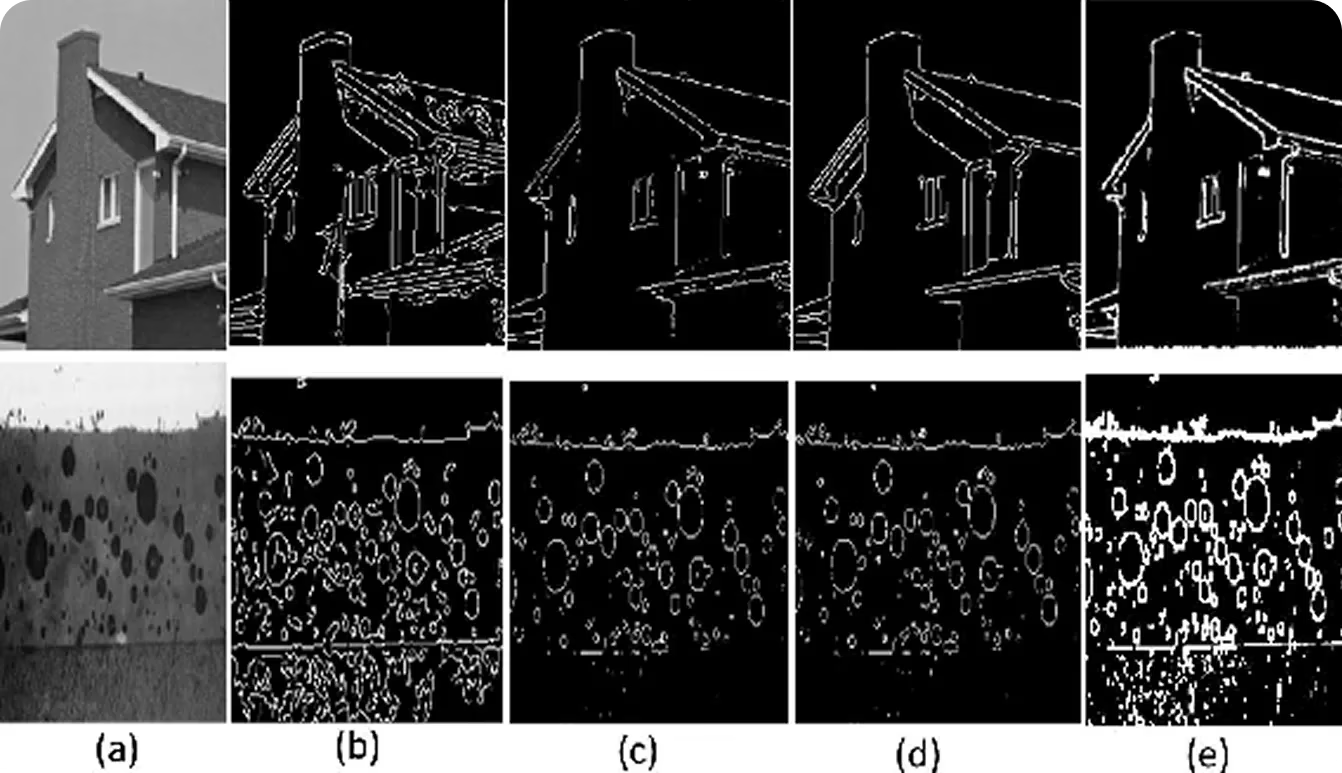
Fig 1. Exemplo mostrando a imagem original ao lado de saídas de diferentes métodos de detecção de bordas. (Fonte)
Neste artigo, vamos dar uma olhada no que é a detecção de bordas, como ela funciona e suas aplicações no mundo real. Vamos começar!
Link to this sectionConceitos de detecção de bordas#
A detecção de bordas foca em buscar locais em uma imagem onde o brilho ou a cor mudam notavelmente de um ponto para o próximo. Se a mudança for pequena, a área parece suave. Se a mudança for brusca, ela frequentemente marca o limite entre duas regiões diferentes.
Aqui estão algumas das razões pelas quais essas mudanças de pixel ocorrem:
- Descontinuidades da normal da superfície: Quando duas superfícies se encontram em um ângulo, como o canto de uma parede ou a borda de uma caixa, essa mudança brusca na orientação produz um limite claro na imagem.
- Descontinuidades de profundidade: Elas aparecem onde os objetos estão a distâncias diferentes da câmera, produzindo uma separação visível que ajuda o sistema a distingui-los.
- Mudanças de cor ou textura da superfície: Isso ocorre quando uma área tem uma cor ou textura diferente da área adjacente, criando uma separação visível.
- Mudanças de iluminação: Surge de mudanças na iluminação, incluindo sombras ou realces em superfícies, criando separações visíveis mesmo quando as superfícies em si são suaves ou contínuas.
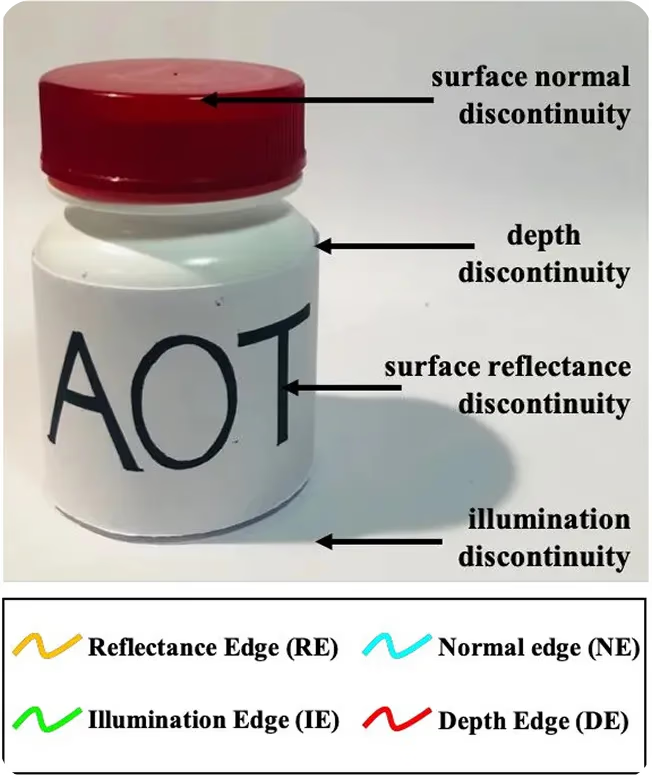
Fig 2. Diferentes tipos de descontinuidades de borda em imagens. (Fonte)
Link to this sectionComo funciona o reconhecimento de detecção de bordas#
A detecção de bordas geralmente começa transformando uma imagem colorida em uma imagem em tons de cinza, para que cada ponto mostre apenas o brilho. Isso torna mais fácil para o algoritmo focar nas diferenças de claro e escuro em vez da cor.
Em seguida, filtros especiais podem escanear a imagem para encontrar locais onde o brilho muda repentinamente. Esses filtros calculam o quão abruptamente o brilho muda, o que é chamado de gradiente. Um gradiente mais alto é causado por uma diferença maior entre pontos vizinhos, o que frequentemente sinaliza uma borda.
O algoritmo então continua refinando a imagem, removendo pequenos detalhes e mantendo apenas as linhas e formas mais importantes. O resultado é um contorno claro e uma imagem de saída que pode ser usada para análises adicionais.
Link to this sectionEvolução da detecção de bordas e processamento de imagens#
Antes de mergulharmos em mais detalhes sobre a detecção de bordas, vamos discutir como ela se desenvolveu ao longo do tempo.
O processamento de imagens começou com métodos simples baseados em regras, como thresholding e filtragem, para limpar e melhorar imagens. Na era analógica, isso significava trabalhar com fotografias ou filmes usando filtros ópticos, lupas ou tratamentos químicos para realçar detalhes.
Técnicas como ajuste de contraste, redução de ruído, ajuste de intensidade da imagem e detecção básica de bordas ajudaram a tornar as imagens de entrada mais claras e a realçar formas e texturas. Nas décadas de 1960 e 70, a mudança do processamento analógico para o digital abriu o caminho para a análise moderna em áreas como astronomia, imagens médicas e monitoramento por satélite.
Nas décadas de 1980 e 90, computadores mais rápidos possibilitaram abordar tarefas mais complexas, como extração de características, detecção de formas e reconhecimento básico de objetos. Algoritmos como o operador Sobel e Canny ofereceram uma detecção de bordas mais precisa, enquanto o reconhecimento de padrões encontrou aplicações em tudo, desde automação industrial até a leitura de texto impresso através de reconhecimento óptico de caracteres.
Link to this sectionDetecção de bordas e visão computacional no século XXI#
Hoje, avanços constantes na tecnologia levaram ao desenvolvimento da visão computacional. Vision AI, ou visão computacional, é um ramo da IA que foca em ensinar máquinas a interpretar e entender informações visuais.
Enquanto o processamento de imagens tradicional, como o limiar duplo (que torna as imagens mais claras mantendo bordas fortes e removendo as fracas) e a detecção de bordas, seguiam regras fixas e podiam lidar apenas com tarefas específicas, a visão computacional usa modelos baseados em dados que podem aprender com exemplos e se adaptar a novas situações.
Atualmente, os sistemas de imagem vão muito além de apenas aprimorar imagens ou detectar bordas. Eles podem reconhecer objetos, rastrear movimento e entender o contexto de uma cena inteira.
Uma das principais técnicas que torna isso possível é a convolução. Uma operação de convolução é um processo onde filtros pequenos (também chamados de kernels) escaneiam uma imagem para encontrar padrões importantes como bordas, cantos e texturas. Esses padrões se tornam os blocos de construção que os modelos de visão computacional usam para reconhecer e entender objetos.
Por exemplo, modelos de visão computacional como o Ultralytics YOLO11 usam esses recursos baseados em convolução para executar tarefas avançadas como segmentação de instâncias. Isso está intimamente relacionado à detecção de bordas, porque a segmentação de instâncias requer delinear com precisão os limites de cada objeto em uma imagem.
Enquanto a detecção de bordas foca em encontrar mudanças de intensidade nos pixels da borda para marcar as bordas do objeto, a segmentação de instâncias constrói sobre essa ideia para detectar bordas, classificar e separar cada objeto em sua própria região.

Fig 3. Uma olhada no uso do YOLO11 e segmentação de instâncias. (Fonte)
Link to this sectionAlgoritmos e abordagens de detecção de bordas#
Mesmo com o crescimento da visão computacional, o processamento de imagens ainda é uma parte importante de muitas aplicações. Isso ocorre porque a visão computacional frequentemente se baseia em etapas básicas de pré-processamento de imagem.
Antes de detectar objetos ou entender uma cena, os sistemas geralmente limpam a imagem, reduzem o ruído e encontram bordas para tornar os detalhes-chave evidentes. Essas etapas tornam os modelos avançados mais precisos e eficientes.
A seguir, vamos explorar alguns dos algoritmos de processamento de imagens mais comuns usados para detectar bordas e como eles funcionam.
Link to this sectionDetecção de bordas Sobel#
A detecção de bordas Sobel é um método fundamental usado para encontrar os contornos de objetos em uma imagem. Em vez de analisar cada detalhe de uma vez, ela foca em áreas onde o brilho muda bruscamente de um pixel para o pixel vizinho.
Essas mudanças repentinas geralmente marcam o ponto onde um objeto termina e outro começa, ou onde um objeto encontra o fundo. Ao isolar essas bordas, Sobel transforma uma imagem complexa em um contorno mais limpo que é mais fácil para outros sistemas processarem para tarefas como rastrear movimento, detectar formas ou reconhecer objetos.
Você pode pensar na detecção de bordas Sobel como um detector de gradiente que mede como a intensidade muda em uma imagem. Em essência, isso funciona através de uma operação de convolução: deslizar pequenas matrizes, chamadas de kernels, pela imagem e calcular somas ponderadas de valores de pixels vizinhos.
Esses kernels são projetados para enfatizar mudanças de brilho nas direções horizontal e vertical. Ao contrário dos modelos de deep learning, onde os kernels são aprendidos a partir de dados, Sobel usa kernels fixos para destacar bordas eficientemente sem exigir treinamento.
Aqui está uma visão mais detalhada de como o método de detecção de bordas Sobel funciona:
- Usando dois filtros 3×3: Este método usa duas pequenas grades 3×3, chamadas de filtros. Pense nelas como estênceis que deslizam sobre a imagem nas direções horizontal (direção x) e vertical (direção y). Uma grade é projetada para encontrar bordas horizontais, e a outra é para bordas verticais.
- Calculando o gradiente: Cada filtro encontra quão rápido o brilho muda e a direção do gradiente. Uma grande mudança significa uma possível borda.
- Combinando resultados: Os resultados horizontais e verticais são combinados para determinar a força e a direção geral da borda em cada pixel.
- Detectando bordas: Pixels com uma magnitude de gradiente alta são marcados como bordas fortes.
- Delineando limites: Essas bordas ajudam a definir formas de objetos e separar diferentes regiões na imagem.
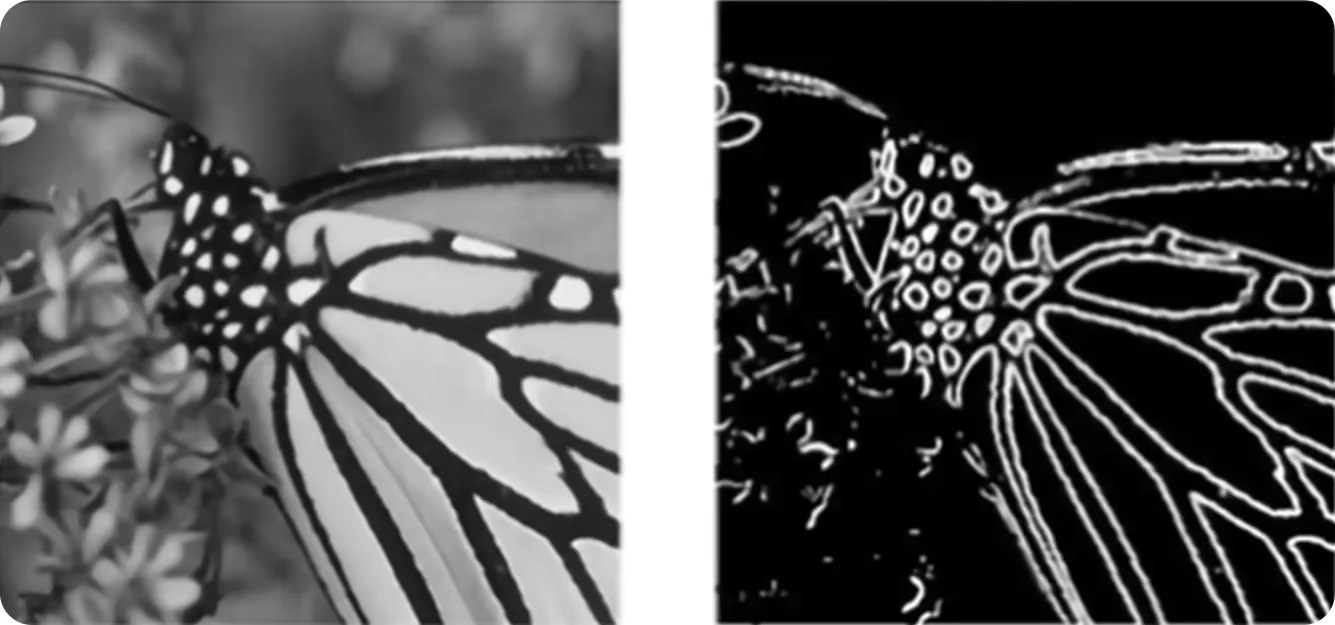
Fig 4. A detecção de bordas Sobel pode destacar os contornos principais de uma imagem de entrada e produzir um mapa de bordas. (Fonte)
Link to this sectionDetecção de bordas Canny#
A detecção de bordas Canny é outro método popular para encontrar bordas em uma imagem. Ela é conhecida por produzir contornos limpos e precisos. Diferente das técnicas básicas de detecção de bordas, ela segue uma série de etapas cuidadosamente projetadas para filtrar ruído, aguçar limites e focar nas bordas mais importantes.
Aqui está uma rápida visão geral de como um detector de bordas Canny funciona:
- Suavizando a imagem: A imagem é primeiro borrada com um filtro Gaussiano, uma técnica de suavização que reduz o ruído e pequenos detalhes que poderiam ser confundidos com bordas.
- Detectando mudanças de brilho: O algoritmo então escaneia por mudanças bruscas no brilho, usando cálculos de gradiente para medir a força e a direção dessas mudanças.
- Afinando as bordas: Apenas os pontos mais fortes ao longo de cada linha detectada são mantidos, enquanto pontos mais fracos são removidos, resultando em bordas nítidas e limpas.
- Classificando bordas: Cada pixel é rotulado como forte, fraco ou não uma borda, com base em valores de limiar de mudança de brilho.
- Limpeza final: Bordas fracas conectadas a fortes são mantidas; todas as outras são descartadas, restando apenas limites claros e conectados.
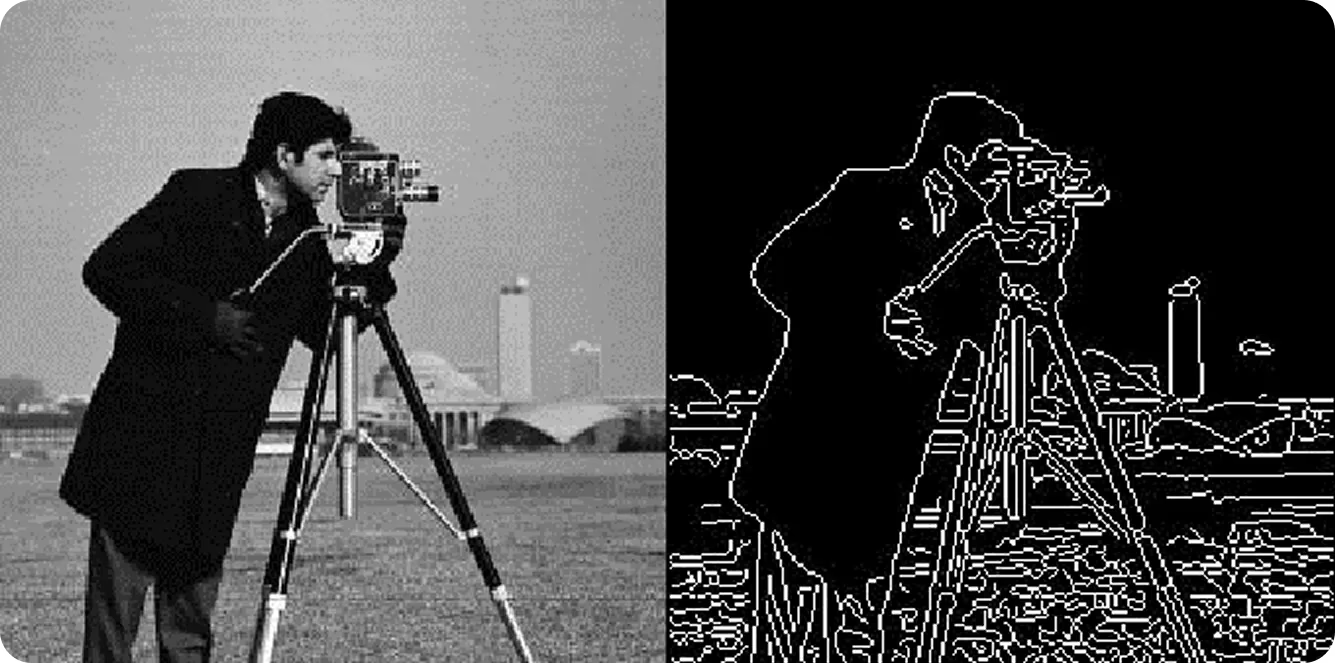
Fig 5. Imagem original e sua respectiva imagem de saída após usar o detector de bordas Canny. (Fonte)
Como entrega resultados precisos ao filtrar o ruído, a detecção de bordas Canny é amplamente usada em áreas onde a precisão importa. Por exemplo, é usada em setores como imagem médica, mapeamento por satélite, digitalização de documentos e visão robótica.
Link to this sectionDetecção de bordas baseada em gradiente vs. baseada em Gaussiana#
Até agora, os dois exemplos de detecção de bordas que analisamos são Sobel e Canny. Embora ambos visem encontrar bordas, eles abordam o problema de forma diferente.
Métodos baseados em gradiente (como Sobel, Prewitt e Scharr) detectam bordas procurando mudanças bruscas no brilho, conhecidas como gradiente. Eles escaneiam a imagem e marcam lugares onde essa mudança é mais forte. Esses métodos são simples, rápidos e funcionam bem quando as imagens estão nítidas. No entanto, eles são sensíveis a ruído – pequenas variações no brilho podem ser confundidas com bordas.
Métodos baseados em Gaussiana (como Canny ou Laplaciano de Gaussiana) adicionam uma etapa extra para lidar com esse problema: borrar a imagem primeiro. Essa suavização, frequentemente feita com um filtro Gaussiano, reduz pequenas variações que poderiam criar bordas falsas. Após a suavização, esses métodos ainda procuram por mudanças bruscas de brilho, mas os resultados são mais limpos e precisos para imagens ruidosas ou de baixa qualidade.
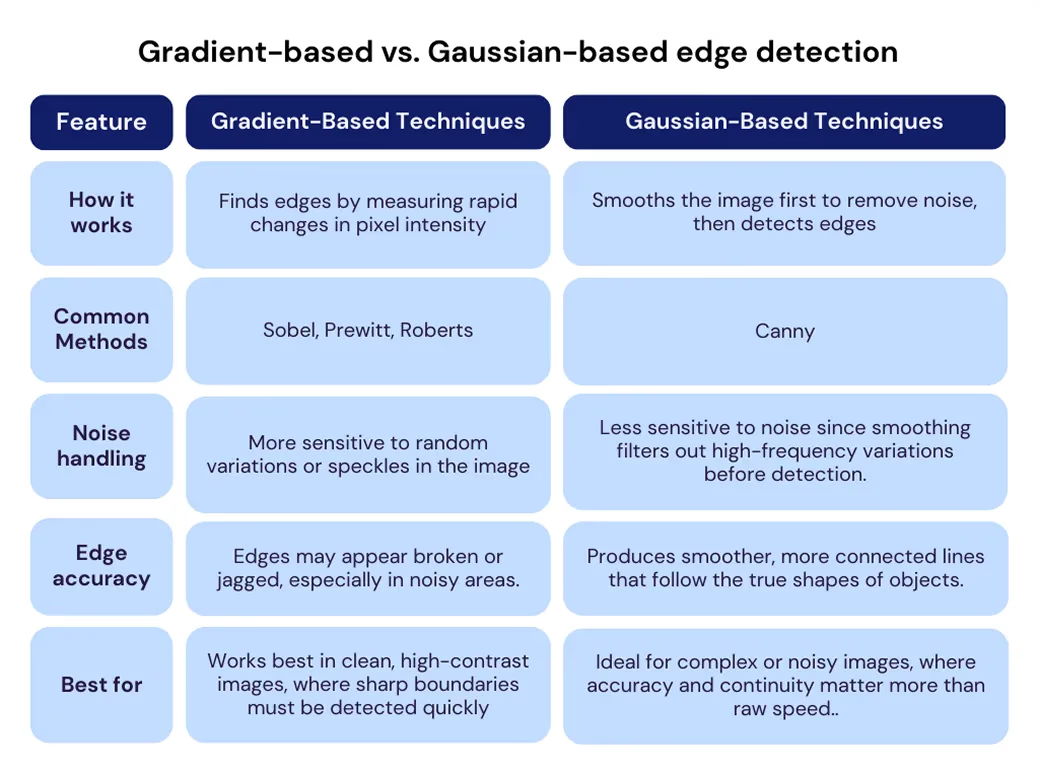
Fig 6. Detecção de bordas baseada em gradiente vs. baseada em Gaussiana. Imagem pelo autor.
Link to this sectionAplicações reais da detecção de bordas#
Com um melhor entendimento de como a detecção de bordas funciona, vamos explorar como ela é aplicada em situações reais.
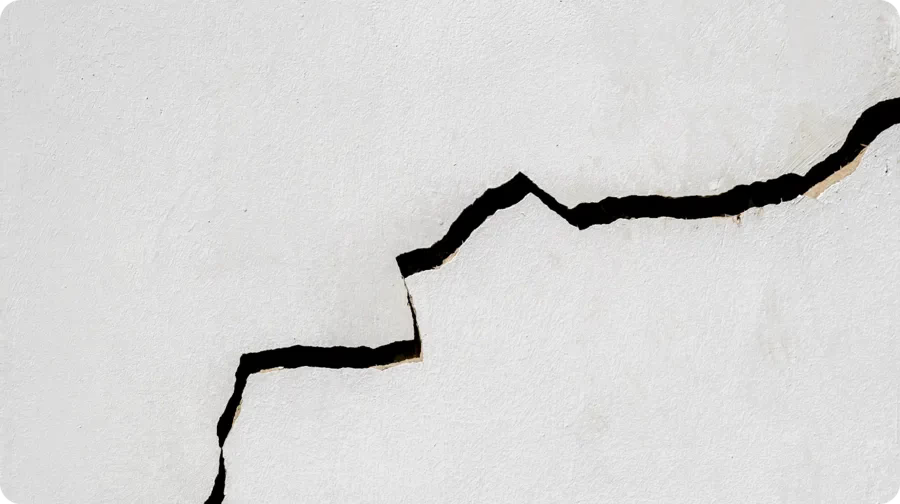
Link to this sectionUsando detecção de bordas para identificar rachaduras#
Inspecionar grandes estruturas de concreto, como pontes e edifícios altos, é frequentemente uma tarefa desafiadora e perigosa. Essas estruturas podem abranger longas distâncias ou atingir grandes elevações, tornando as inspeções tradicionais lentas, caras e arriscadas. Essas inspeções também normalmente exigem andaimes, acesso por corda, medições manuais de perto ou fotografia.
Uma abordagem interessante foi explorada em 2019, quando pesquisadores testaram um método mais seguro e rápido usando drones equipados com câmeras de alta resolução para capturar imagens de entrada detalhadas de superfícies de concreto. Essas imagens foram então processadas com várias técnicas de detecção de bordas para identificar rachaduras automaticamente.
O estudo mostrou que este método reduziu significativamente a necessidade de acesso humano direto a áreas perigosas e acelerou as inspeções. No entanto, sua precisão ainda dependia de fatores como condições de iluminação, clareza da imagem e operação estável do drone. Em alguns casos, a revisão humana ainda era necessária para eliminar falsos positivos.
Link to this sectionAplicando a detecção de bordas em imagens médicas#
Raios-X e ressonâncias magnéticas geralmente contêm distúrbios visuais conhecidos como ruído, o que pode tornar os detalhes finos mais difíceis de ver. Isso se torna um desafio para os médicos ao tentar detectar as bordas de um tumor, traçar o contorno de um órgão ou monitorar mudanças sutis ao longo do tempo.
Um estudo de imagem médica recente testou quão bem os métodos comuns de detecção de bordas, como Sobel, Canny, Prewitt e Laplaciano, lidam com imagens ruidosas. Os pesquisadores adicionaram diferentes tipos e níveis de ruído às imagens e verificaram com que precisão cada método conseguia delinear características importantes.
Canny geralmente produziu as bordas mais limpas, mesmo quando o ruído era intenso, mas não foi o melhor em todos os casos. Alguns métodos funcionaram melhor com certos padrões de ruído, então não existe uma solução perfeita única.
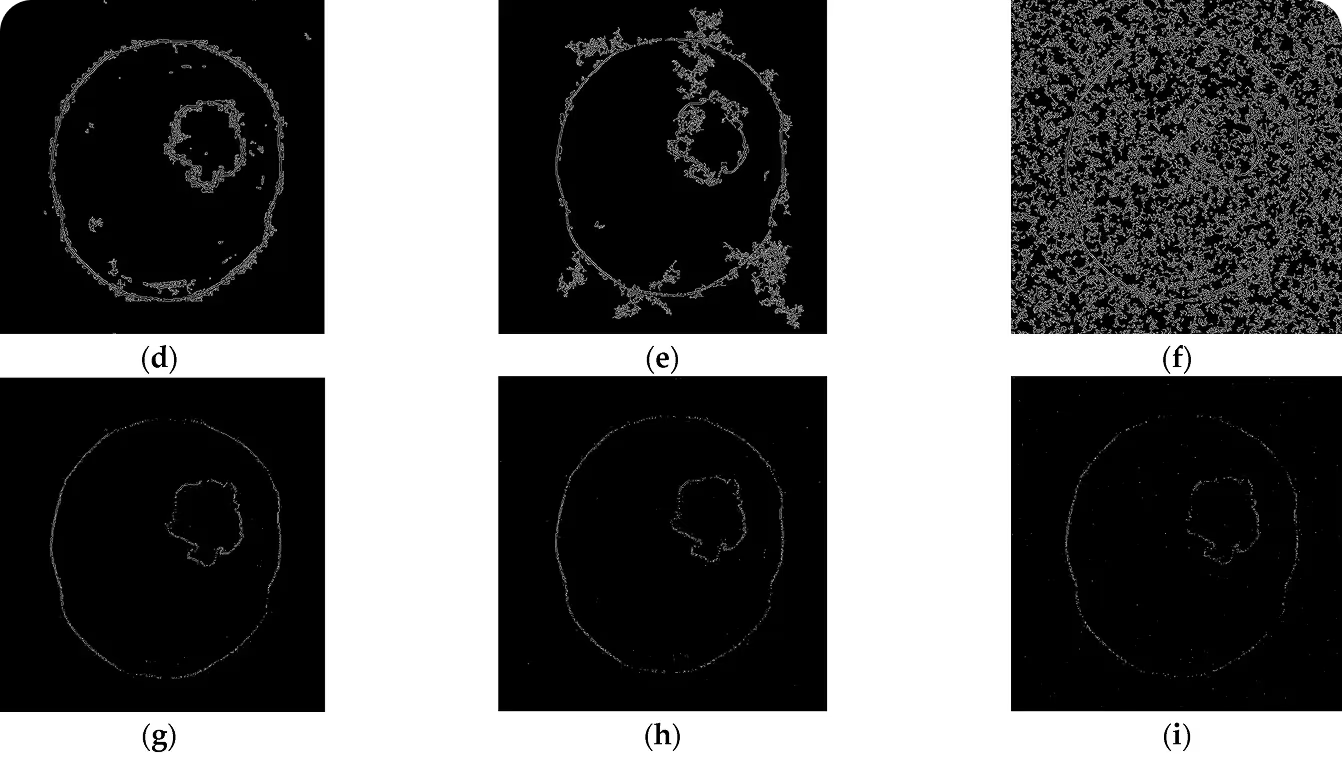
Fig 7. Canny (d–f) fornece bordas mais claras que Sobel (g–i) conforme o ruído aumenta. (Fonte)
Isso destaca por que tecnologias como visão computacional são tão importantes. Ao combinar algoritmos avançados e modelos de Vision AI, tais soluções podem ir além da detecção de bordas básica para entregar resultados mais precisos e confiáveis, mesmo em condições desafiadoras.
Link to this sectionVantagens da detecção de bordas#
Aqui estão alguns dos benefícios de usar detecção de bordas e processamento de imagens:
- Melhor compressão de dados: A detecção de bordas permite que as imagens sejam representadas usando apenas características-chave, reduzindo o tamanho do arquivo enquanto mantém informações essenciais. Isso torna o armazenamento e a transmissão mais eficientes.
- Localização de objetos mais precisa: Ao identificar com precisão os limites dos objetos, a detecção de bordas melhora a capacidade dos sistemas de localizar e rastrear objetos, beneficiando aplicações como IA em robótica de visão e veículos autônomos.
- Detecção de características multiescala: As técnicas de detecção de bordas podem analisar imagens em diferentes escalas, capturando tanto pequenos detalhes quanto formas maiores. Essa flexibilidade é útil em diversas tarefas, desde a análise de textura até a compreensão de cenas.
Link to this sectionLimitações do uso de processamento de imagens para detecção de bordas#
Embora existam muitos benefícios na detecção de bordas em processamento de imagens, ela também traz alguns desafios. Aqui estão algumas das principais limitações a considerar:
- Problemas com texturas complexas: Em imagens com padrões intrincados ou repetitivos, a detecção de bordas frequentemente produz muitas bordas falsas ou irrelevantes, o que complica análises posteriores e reduz a confiabilidade.
- Sensível à iluminação: Variações no brilho, sombras e reflexos podem fazer com que os detectores de borda interpretem erroneamente as mudanças na iluminação como limites de objetos, levando a resultados inconsistentes.
- Sem identificação de objetos: Embora as bordas destaquem onde os objetos começam e terminam, elas não mostram o que são os objetos. É necessário processamento adicional para atribuir significado ou rótulos às bordas detectadas.
Link to this sectionQuando a visão computacional pode ser usada para detecção de bordas#
A detecção de bordas é inspirada em como nossos olhos e cérebro trabalham juntos para dar sentido ao mundo. Quando se trata da visão humana, neurônios especializados no córtex visual são altamente sensíveis a bordas, linhas e limites.
Essas pistas visuais nos ajudam a determinar rapidamente onde um objeto termina e outro começa. É por isso que até mesmo um desenho simples de linhas pode ser instantaneamente reconhecível - nosso cérebro depende fortemente de bordas para identificar formas e objetos.
A visão computacional visa imitar essa capacidade, mas vai um passo além. Modelos como o Ultralytics YOLO11 vão além do realce de bordas e aprimoramento de imagem básico. Eles podem detectar objetos, delineá-los com precisão e rastrear movimentos em tempo real. Esse nível mais profundo de compreensão os torna essenciais em cenários onde a detecção de bordas por si só não é suficiente.
Link to this sectionUsando o Ultralytics YOLO11 para detectar bordas com mais precisão#
Aqui estão algumas tarefas-chave de visão computacional suportadas pelo YOLO11 que se baseiam e vão além da detecção de bordas:
- Detecção de objetos: Identifica e localiza vários objetos em uma imagem ou vídeo desenhando caixas delimitadoras ao redor de cada um, fornecendo uma visão clara do que está presente e onde cada objeto está posicionado.
- Segmentação de instâncias: Envolve dividir objetos até o nível de pixel, produzindo contornos limpos e precisos, mesmo quando os objetos se sobrepõem ou têm formas irregulares.
- Estimativa de pose: O objetivo aqui é determinar a posição, orientação ou postura de um objeto ou pessoa, o que ajuda no monitoramento de movimentos ou na detecção de mudanças estruturais ao longo do tempo.
- Rastreamento de objetos: Esta tarefa acompanha um objeto à medida que ele se move através de quadros de vídeo, garantindo uma identificação consistente para uma observação precisa de longo prazo.
- Classificação de imagens: Atribui rótulos a objetos ou imagens inteiras com base em suas características visuais, tornando mais fácil organizar e interpretar grandes conjuntos de dados.
Link to this sectionDetectando bordas em infraestrutura com visão computacional#
Um bom exemplo de visão computacional aprimorando uma aplicação que tradicionalmente dependia de detecção de bordas é a detecção de rachaduras em infraestruturas e ativos industriais. Modelos de visão computacional como YOLO11 podem ser treinados para identificar com precisão rachaduras em estradas, pontes e tubulações. A mesma técnica também pode ser aplicada na manutenção de aeronaves, inspeções prediais e controle de qualidade industrial, ajudando a acelerar as inspeções e melhorar a segurança.
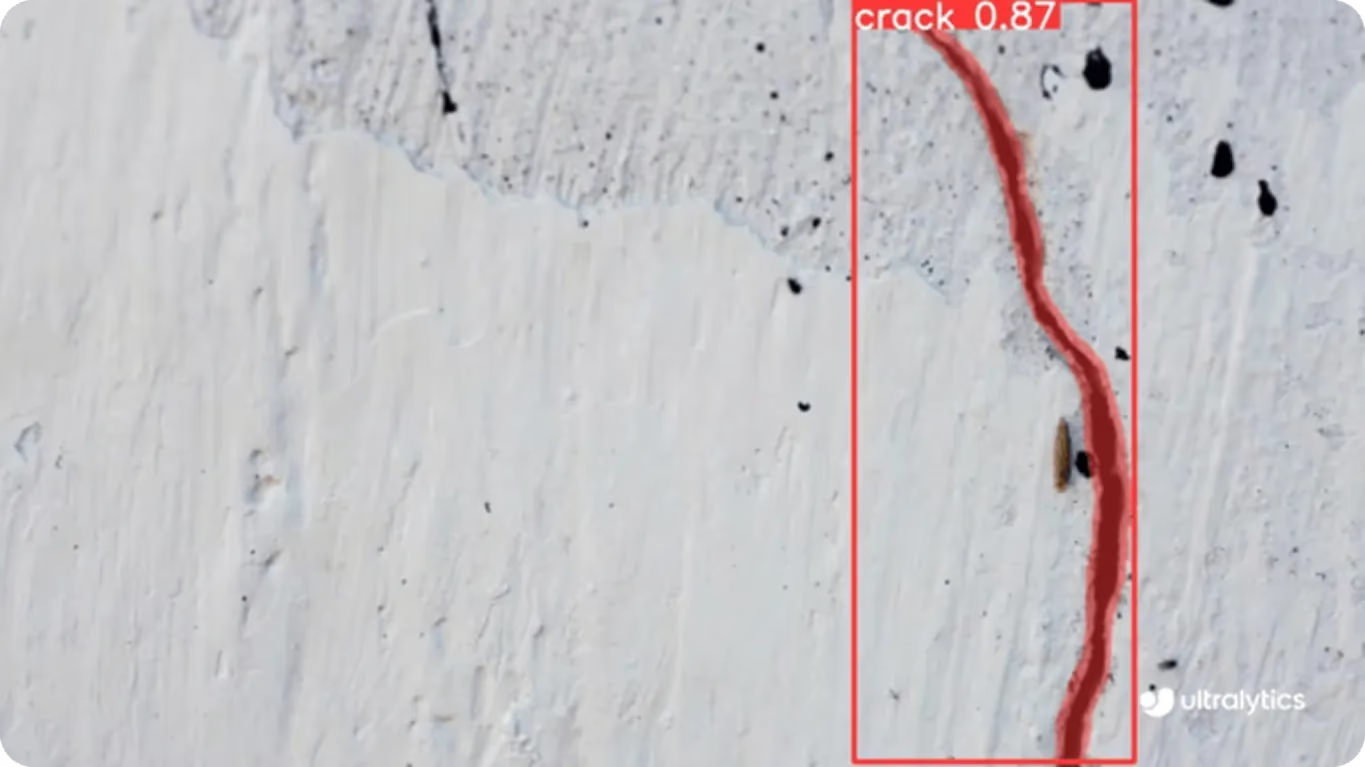
Fig 8. Um exemplo de uso do YOLO11 para segmentação de rachaduras. (Fonte)
Link to this sectionPrincipais pontos#
A detecção de bordas percorreu um longo caminho, desde métodos iniciais simples até técnicas avançadas que conseguem identificar até mesmo limites sutis em imagens complexas. Ela ajuda a revelar detalhes importantes, destacar áreas-chave e preparar imagens para análises mais profundas, tornando-se uma parte fundamental do processamento de imagens.
Na visão computacional, a detecção de bordas desempenha um papel importante na definição de formas, na separação de objetos e na extração de informações úteis. É utilizada em muitas áreas, como imagens médicas, inspeções industriais, direção autônoma e segurança, para oferecer uma compreensão visual precisa e confiável.
Junte-se à nossa comunidade e explore nosso repositório no GitHub para descobrir mais sobre IA. Se você deseja iniciar seu próprio projeto de visão computacional com IA, confira nossas opções de licenciamento. Descubra mais sobre aplicações como IA na saúde e visão computacional com IA no varejo visitando nossas páginas de soluções.






