Преимущества того, что Ultralytics YOLO11 является детектором без использования анкоров
Узнай, как Ultralytics YOLO11 поддерживает бесконтурное обнаружение объектов и какие преимущества эта архитектура модели приносит различным приложениям.

Если мы оглянемся на историю моделей компьютерного зрения, то увидим, что концепция обнаружения объектов — фундаментальная задача компьютерного зрения, которая заключается в идентификации и определении местоположения объектов на изображениях или видео — существует с 1960-х годов. Однако главная причина её значимости для современных инноваций заключается в том, что с тех пор методы обнаружения объектов и архитектуры моделей значительно продвинулись и быстро усовершенствовались.
В предыдущей статье мы обсуждали эволюцию обнаружения объектов и путь, который привел к моделям Ultralytics YOLO. Сегодня мы сосредоточимся на более конкретной вехе в этом развитии: переходе от якорь-зависимых (anchor-based) детекторов к якорь-независимым (anchor-free) детекторам.
Якорь-зависимые детекторы полагаются на предопределенные рамки, называемые «якорями», для прогнозирования местоположения объектов на изображении. Напротив, anchor-free детекторы пропускают эти предопределенные рамки и вместо этого предсказывают местоположение объектов напрямую.
Хотя этот переход может показаться простым и логичным изменением, на самом деле он привел к значительным улучшениям в точности и эффективности обнаружения объектов. В этой статье мы разберем, как anchor-free детекторы изменили компьютерное зрение благодаря таким достижениям, как Ultralytics YOLO11.
Link to this sectionЧто такое якорь-зависимые детекторы?#
Якорь-зависимые детекторы используют предопределенные рамки, известные как якоря, чтобы помочь найти объекты на изображении. Представь эти якоря как сетку из рамок разных размеров и форм, наложенную на изображение. Затем модель корректирует эти рамки, чтобы они соответствовали обнаруженным объектам. Например, если модель идентифицирует автомобиль, она изменит якорную рамку, чтобы точнее соответствовать положению и размеру автомобиля.
Каждый якорь (anchor) связан с возможным объектом на изображении, и во время обучения модель учится настраивать якорные рамки (anchor boxes), чтобы точнее соответствовать местоположению, размеру и соотношению сторон объекта. Это позволяет модели обнаруживать объекты разного масштаба и ориентации. Однако подбор правильного набора якорных рамок может отнимать много времени, а процесс их тонкой настройки бывает подвержен ошибкам.
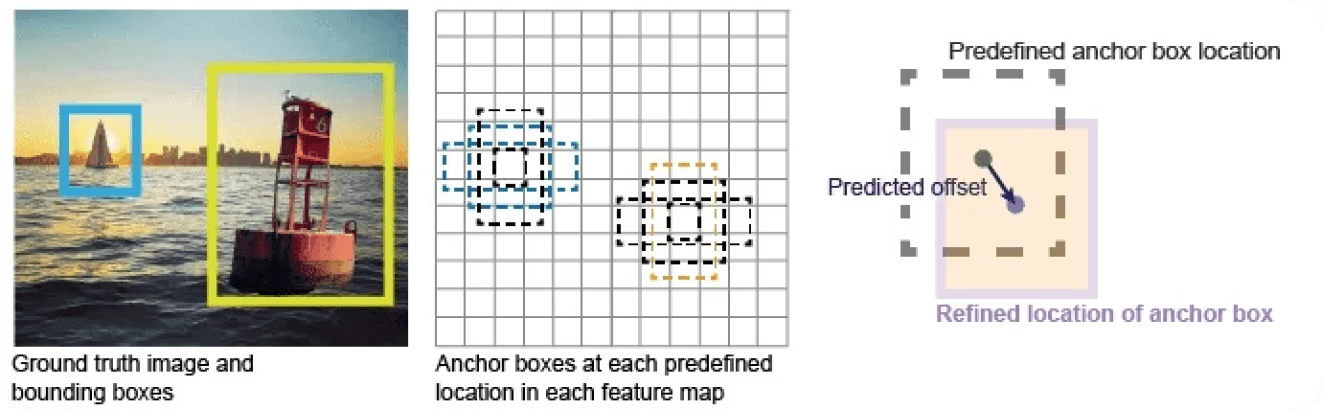
Рис 1. Что такое якорная рамка?
Хотя якорь-зависимые детекторы, такие как YOLOv4, хорошо работают во многих приложениях, у них есть свои недостатки. Например, якорные рамки не всегда хорошо совмещаются с объектами разной формы или размера, что затрудняет обнаружение мелких или объектов неправильной формы. Процесс выбора и донастройки размеров якорных рамок также может занимать много времени и требует больших ручных усилий. Кроме того, якорь-зависимые модели часто сталкиваются с трудностями при обнаружении перекрытых или частично закрытых объектов, так как предопределенные рамки могут плохо адаптироваться к таким сложным сценариям.
Link to this sectionПереход к anchor-free обнаружению объектов#
Anchor-free детекторы начали привлекать внимание в 2018 году с такими моделями, как CornerNet и CenterNet, которые применили свежий подход к обнаружению объектов, избавившись от необходимости в предопределенных якорных рамках. В отличие от традиционных моделей, которые полагаются на якорные рамки разных размеров и форм для предсказания места расположения объектов, anchor-free модели предсказывают местоположение объектов напрямую. Они фокусируются на ключевых точках или особенностях объекта, таких как центр, что упрощает процесс обнаружения и делает его быстрее и точнее.
Вот как обычно работают anchor-free модели:
- Детекция ключевых точек: Вместо использования предопределенных рамок некоторые модели определяют важные точки на объекте, например центр или конкретные углы. Эти ключевые точки помогают моделям понять, где находится объект и каков его размер.
- Предсказание центра: Некоторые модели фокусируются на предсказании центра объекта. Как только центр найден, модель может предсказать размер и положение всего объекта исходя из этой точки.
- Регрессия тепловых карт: Многие безакорные (anchor-free) модели используют тепловые карты, где каждый пиксель представляет собой возможное местоположение объекта. Более высокие значения на тепловой карте указывают на большую уверенность в том, что в этой точке присутствует объект.
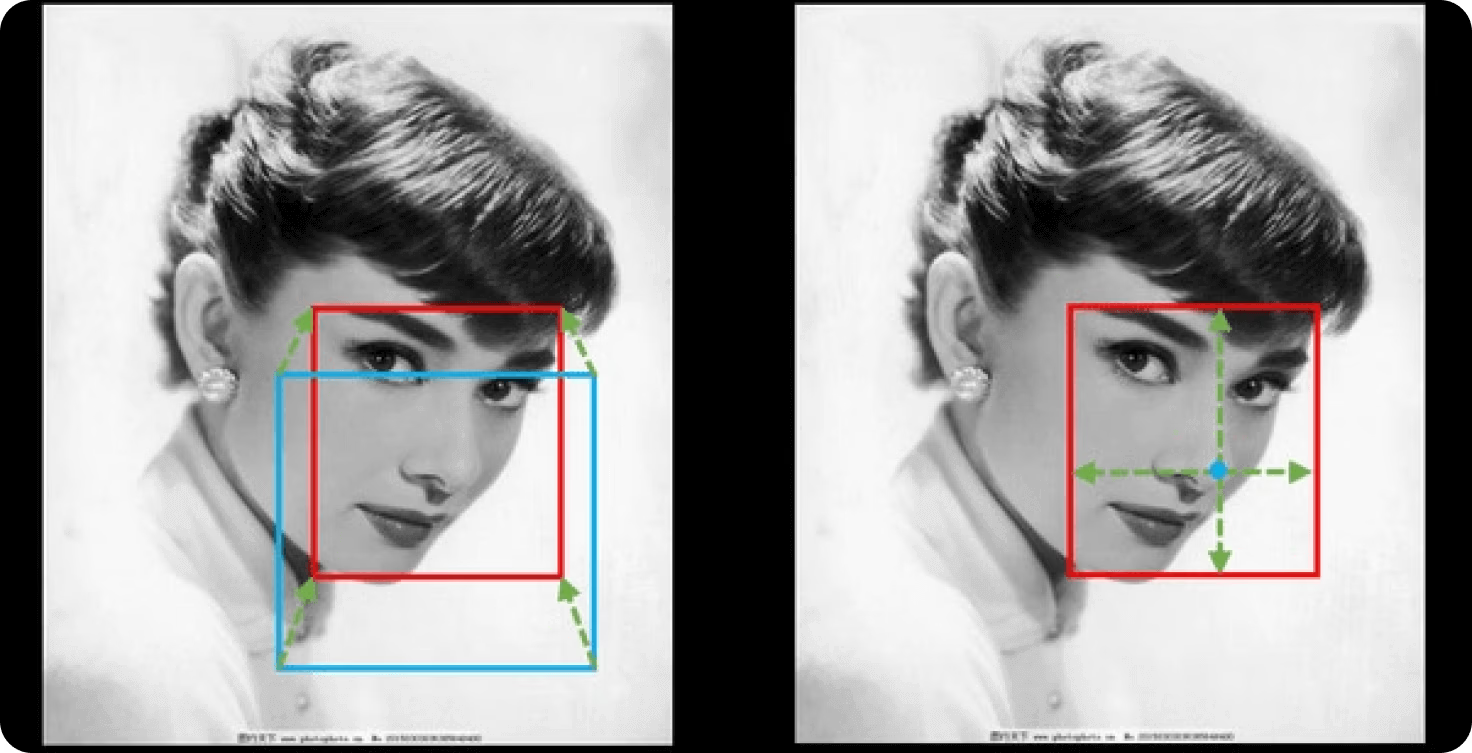
Рис 2. Сравнение якорь-зависимого и anchor-free детектирования.
Поскольку anchor-free модели не зависят от якорных рамок, у них более простая архитектура. Это означает, что они более вычислительно эффективны. Поскольку им не нужно обрабатывать множество якорных рамок, они могут обнаруживать объекты быстрее — важное преимущество в приложениях реального времени, таких как автономное вождение и видеонаблюдение.
Anchor-free модели также гораздо лучше справляются с мелкими, неправильными или перекрытыми объектами. Поскольку они фокусируются на обнаружении ключевых точек, а не на попытках вписать объект в якорные рамки, они гораздо более гибкие. Это позволяет им обнаруживать объекты точно в загроможденных или сложных средах, где якорь-зависимые модели могут дать сбой.
Link to this sectionUltralytics YOLO11: anchor-free детектор#
Изначально разработанные для скорости и эффективности, модели YOLO постепенно перешли от якорь-зависимых методов к anchor-free детекции, что делает такие модели, как YOLO11, быстрее, гибче и лучше подходящими для широкого спектра приложений реального времени.
Вот краткий обзор того, как anchor-free дизайн развивался в разных версиях YOLO:
- Ultralytics YOLOv5u: Представила «Anchor-Free Split Ultralytics Head», устранив необходимость в предопределенных якорных рамках. Вместо этого модель напрямую предсказывает, где находятся объекты на изображении, упрощая процесс и улучшая гибкость и скорость.
- YOLOv6: Был использован новый метод под названием Anchor-Aided Training (AAT), где якоря использовались только во время обучения. Это позволило модели извлечь выгоду из структуры якорь-зависимых методов при обучении, в то же время используя anchor-free детекцию во время работы для повышения скорости и адаптивности.
- Ultralytics YOLOv8: Полностью перешла на anchor-free детекцию, используя «Anchor-Free Split Ultralytics Head». Это сделало модель быстрее и точнее, особенно для мелких или необычно сформированных объектов, которые плохо вписываются в якорные рамки.
- Ultralytics YOLO11: Основывается на подходе YOLOv8 без использования якорей, оптимизируя обнаружение еще сильнее за счет полного устранения якорных рамок. Это приводит к более быстрому и точному обнаружению в приложениях реального времени, таких как мониторинг поведения животных и розничная аналитика.
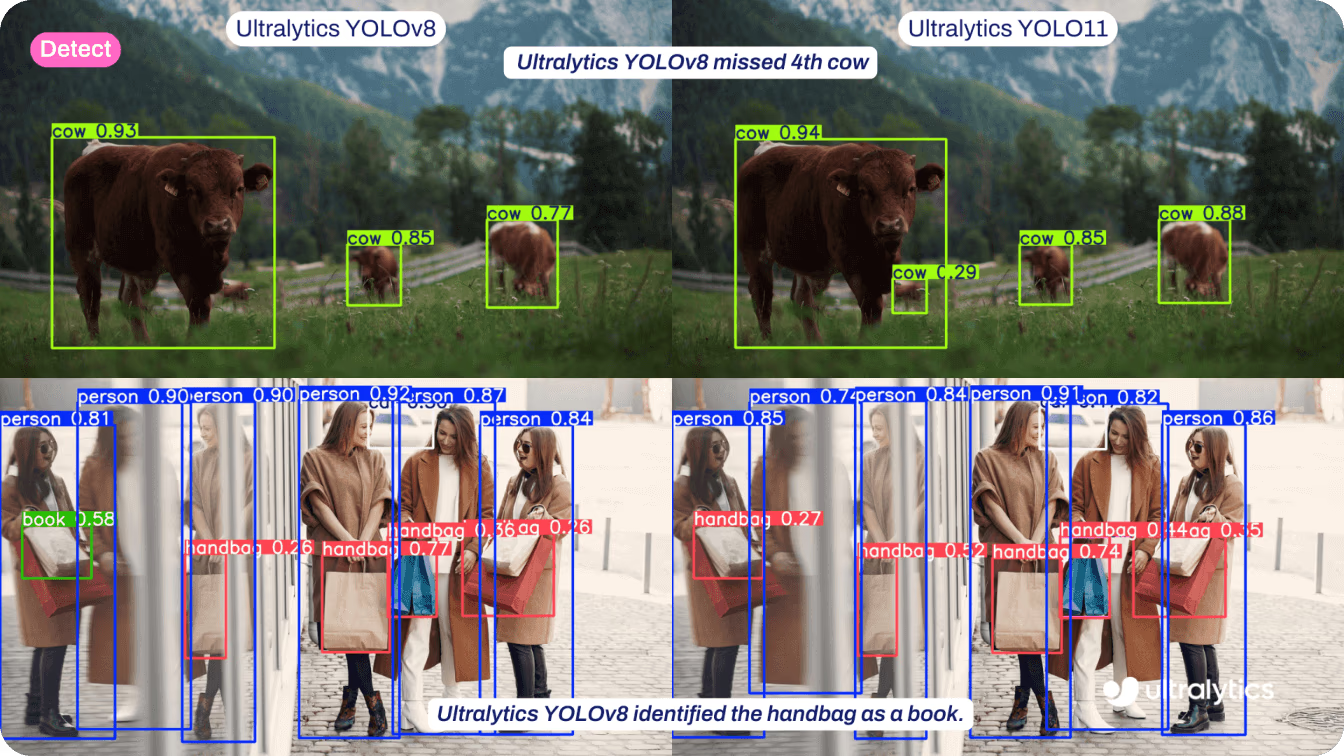
Рис 3. Сравнение Ultralytics YOLOv8 и Ultralytics YOLO11.
Link to this sectionПрименение YOLO11 в реальных задачах#
Отличным примером преимуществ anchor-free детекции с использованием YOLO11 являются автономные транспортные средства. В беспилотных автомобилях быстрое и точное обнаружение пешеходов, других транспортных средств и препятствий критически важно для безопасности. Anchor-free подход YOLO11 упрощает процесс обнаружения за счет прямого предсказания ключевых точек объектов, таких как центр пешехода или границы другого автомобиля, вместо того чтобы полагаться на предопределенные якорные рамки.

Рис 4. Преимущества anchor-free детекции в YOLO11 (Изображение автора).
YOLO11 не нужно подстраивать или сопоставлять сетку якорей с каждым объектом, что может быть вычислительно дорого и медленно. Вместо этого она фокусируется на ключевых особенностях, становясь быстрее и эффективнее. Например, когда пешеход выходит на путь автомобиля, YOLO11 может быстро определить его местоположение, выделяя ключевые точки, даже если человек частично скрыт или находится в движении. Способность адаптироваться к изменяющимся формам и размерам без якорных рамок позволяет YOLO11 обнаруживать объекты более надежно и на более высоких скоростях, что жизненно важно для принятия решений в реальном времени в системах автономного вождения.
Другие области применения, где anchor-free возможности YOLO11 особенно выделяются:
- Розничная торговля и управление запасами: YOLO11 упрощает мониторинг товаров на полках, даже если они сложены или частично перекрыты. Это помогает в более быстром и точном отслеживании запасов и снижает количество ошибок.
- Медицинская визуализация: YOLO11 также эффективна в здравоохранении, где она может обнаруживать опухоли или другие аномалии на медицинских сканах. Ее способность работать с объектами неправильной формы помогает повысить точность диагностики сложных состояний.
- Мониторинг дикой природы: В исследованиях дикой природы YOLO11 может отслеживать животных в густых лесах или на труднопроходимой местности, помогая исследователям следить за поведением или защищать вымирающие виды.
- Спортивная аналитика: YOLO11 можно использовать для отслеживания игроков, движений мяча или других элементов в реальном времени во время спортивных событий, чтобы предоставлять ценную информацию командам, тренерам и телевещателям.
Link to this sectionЧто следует учитывать при работе с anchor-free моделями#
Хотя anchor-free модели, такие как YOLO11, предлагают множество преимуществ, у них есть определенные ограничения. Один из основных практических моментов заключается в том, что даже anchor-free модели могут испытывать трудности с перекрытиями или сильно накладывающимися друг на друга объектами. Обоснование здесь в том, что компьютерное зрение стремится воспроизвести человеческое зрение, и подобно тому, как нам иногда трудно идентифицировать перекрытые объекты, модели ИИ могут сталкиваться с похожими проблемами.
Еще один интересный фактор связан с обработкой предсказаний модели. Хотя архитектура anchor-free моделей проще, чем якорь-зависимых, в определенных случаях требуется дополнительная доработка. Например, методы постобработки, такие как non-maximum suppression (NMS), могут потребоваться для очистки перекрывающихся предсказаний или повышения точности в переполненных сценах.
Link to this sectionЗакрепляя будущее ИИ с помощью YOLO11#
Переход от якорь-зависимого к anchor-free обнаружению стал значительным прогрессом в области детектирования объектов. Благодаря anchor-free моделям, таким как YOLO11, процесс упрощается, что ведет к улучшению как точности, так и скорости.
Благодаря YOLO11 мы увидели, как anchor-free обнаружение объектов преуспевает в приложениях реального времени, таких как беспилотные автомобили, видеонаблюдение и медицинская визуализация, где быстрая и точная детекция крайне важна. Этот подход позволяет YOLO11 легче адаптироваться к изменяющимся размерам объектов и сложным сценам, обеспечивая лучшую производительность в разнообразных условиях.
По мере того как компьютерное зрение продолжает развиваться, обнаружение объектов будет только становиться быстрее, гибче и эффективнее.
Изучи наш репозиторий на GitHub и присоединяйся к нашему активному сообществу, чтобы быть в курсе всех новостей в мире ИИ. Посмотри, как vision AI влияет на такие отрасли, как производство и сельское хозяйство.






