2025'te bilgisayarlı görü için kamera kalibrasyonu rehberi
Kamera kalibrasyonunun bozulmaları düzelterek, derinlik kestirimini iyileştirerek ve çeşitli bilgisayarlı görü uygulamalarında doğruluğu artırarak görsel yapay zekayı nasıl geliştirdiğini öğren.

Kameralar dünyayı insanlar gibi görmez. Çoğu zaman, görüntüleri vizyon AI modelinin doğruluğunu etkileyebilecek bozulmalar ve perspektif kaymalarıyla yakalarlar. Kamera kalibrasyonu, bu bozulmaları düzeltebilir ve bilgisayarlı görü modellerinin nesneleri gerçek dünyada oldukları gibi algılayabilmesini sağlayabilir. Bu işlem, lens bozulmasının düzeltilmesini, odak uzaklığı ayarlamalarını ve kameraların doğru görüntüler yakalamasına yardımcı olmak için sensörlerin hizalanmasını içerir.
Özellikle, doğru kamera kalibrasyonu, derinliği tahmin etmek ve mesafeleri doğru bir şekilde ölçmek için anahtardır. Ultralytics YOLO11 gibi vizyon AI modelleri, nesne algılama ve poz tahmini gibi çeşitli bilgisayarlı görü görevlerini gerçekleştirmek için iyi kalibre edilmiş girişlere ihtiyaç duyar. Uygun giriş görüntüleri olmadan, model performansı düşebilir ve gerçek dünya uygulamalarında hatalara yol açabilir.
Geleneksel dama tahtası desenlerinden gelişmiş AI destekli tekniklere kadar farklı kamera kalibrasyon yöntemleri, hassasiyeti artırmaya yardımcı olabilir. Örneğin, 3D (üç boyutlu) kalibrasyon modellerin derinliği anlamasına yardımcı olurken, bir kalibrasyon matrisi daha iyi doğruluk için gerçek dünya koordinatlarını görüntü uzayına dönüştürür.
Bu rehberde, temel parametreler, farklı yöntemler ve gerçek dünya AI uygulamaları için optimizasyon dahil olmak üzere bilgisayarlı görü için kamera kalibrasyonunun temellerini ele alacağız.
Link to this sectionBilgisayarlı görüde kamera kalibrasyonunun önemi#
Kamera kalibrasyonu, görüntülerin gerçek dünya ölçümleriyle doğru bir şekilde eşleşmesini sağlamak için bir kameranın ayarlarını yapmak amacıyla kullanılır. Bir görüntüdeki nesnelerin doğru konumda, boyutta ve oranda görünmesini garanti ederek AI modellerini yanıltabilecek bozulmaları önler.
Uygun kalibrasyon olmadan, kameralar lens bozulmasına neden olarak nesnelerin gerilmiş veya yanlış hizalanmış görünmesine yol açabilir. Bu durum, nesne algılama, takip ve derinlik tahmininin doğruluğunu etkileyerek AI destekli uygulamalarda hatalara neden olur. Özellikle, YOLO11 gibi modeller, giriş verileri düzgün bir şekilde kalibre edildiğinde daha etkili bir şekilde performans gösterir; bu da uzamsal yorumlamadaki hataları azaltır ve gerçek dünya karar verme süreçlerini iyileştirir.
Doğru kalibrasyon özellikle dronlar, sürücüsüz araçlar ve robotik görüş söz konusu olduğunda önemlidir. Bu sistemlerdeki yanlış hizalanma, navigasyon ve engel algılama gibi görevleri etkileyerek yanlış mesafe hesaplamalarına yol açabilir.
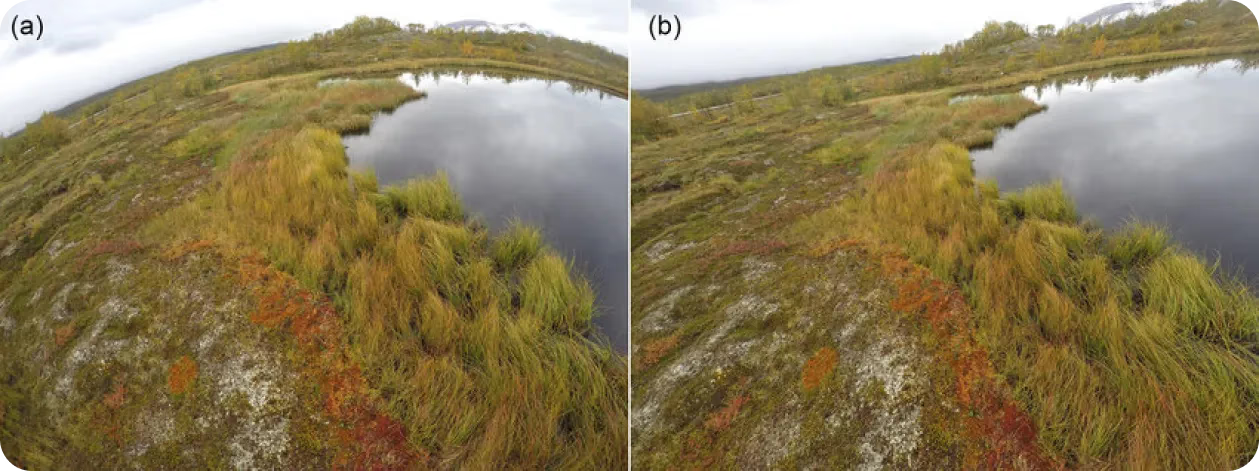
Şekil 1. Kamera kalibrasyonu kullanılarak düzeltilen (sağda) bir lens bozulması örneği (solda).
Link to this sectionLens bozulması etkilerini keşfetme#
Lens bozulmaları, bir kameranın görüntüdeki nesne şekillerini ve konumlarını yanlış temsil etmesine neden olabilir. İşte farklı lens bozulması türlerine dair bazı örnekler:
- Fıçı bozulması (Barrel distortion): Burada düz çizgiler dışa doğru bükülmüş gibi görünür, bu da görüntünün merkezindeki nesnelerin şişkin görünmesine neden olur. Bu durum geniş açılı lenslerde yaygındır ve derinlik algısını bozarak otonom sistemlerde 3D kalibrasyonu aksatabilir.
- İğne yastığı bozulması (Pincushion distortion): Bu durumda, düz çizgiler görüntünün merkezine doğru içe bükülür ve fıçı bozulmasının tam tersi bir etki yaratır.
- Bıyık bozulması (Mustache distortion): Bu, hem fıçı hem de iğne yastığı bozulmaları birleştiğinde ortaya çıkar ve düz çizgilerin dalga benzeri bir düzende bükülmesine neden olur.
- Renk sapması (Chromatic aberration): Bu, bir lens renkleri aynı noktaya odaklayamadığında meydana gelir ve nesnelerin etrafında renk saçakları oluşturur.
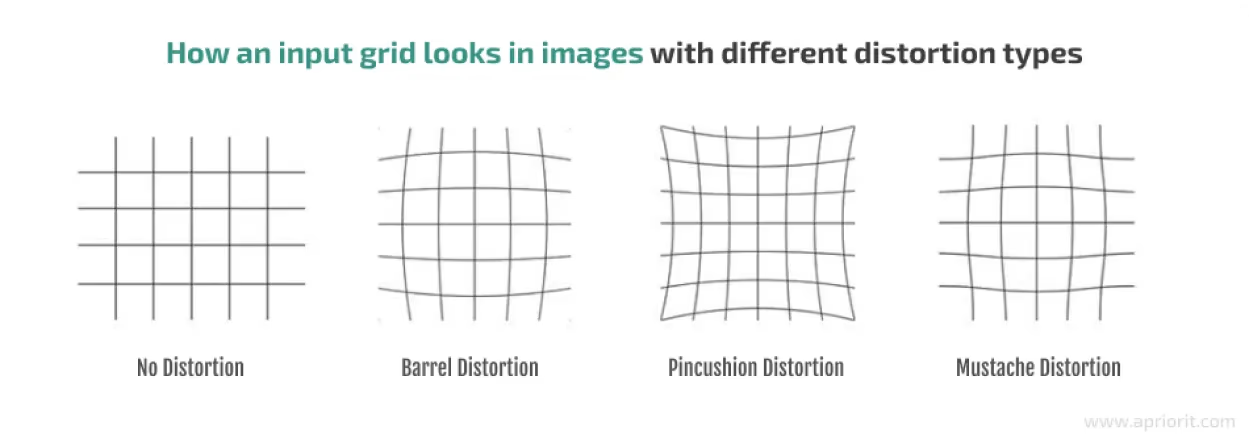
Şekil 2. Farklı lens bozulması türleri.
Link to this sectionKamera kalibrasyon türleri#
Kamera kalibrasyonu iki temel bileşenden oluşur: kameranın iç özelliklerini tanımlayan içsel (intrinsic) parametreler ve dünyaya göre konumunu ve yönelimini belirleyen dışsal (extrinsic) parametreler. Her iki bileşen türüne de daha yakından bakalım.
Link to this sectionİçsel (intrinsic) parametreler#
Hassas içsel kalibrasyon, algılanan nesnelerin gerçek dünya uygulamalarında doğru konumda ve ölçekte görünmesini sağlayarak model tahminlerini iyileştirebilir. İşte birkaç içsel parametreye hızlı bir bakış:
- Odak uzaklığı (Focal length): Bir kameranın 3D nesneleri 2D bir görüntüye nasıl yansıttığını kontrol eder. Yanlış kalibre edilirse, nesneler gerilmiş veya sıkıştırılmış görünebilir, bu da algılanan boyutlarını ve mesafelerini değiştirebilir.
- Asıl nokta (Principal point): Bu, kamera sensörünün optik merkezini temsil eder. Ofset durumunda, tüm görüntüyü kaydırabilir ve bu da nesne konumlandırmada yanlış hizalamaya yol açabilir.
- Eğrilik katsayısı (Skew coefficient): Sensördeki dikdörtgen olmayan piksel düzenlemelerini hesaba katar. Eğrilik mevcut olduğunda, görüntü düzgün hizalanmak yerine eğik veya çarpık görünebilir.
- Bozulma katsayıları (Distortion coefficients): Bu parametreler, lensin neden olduğu optik bozulmaları düzeltir. Düzeltme yapılmazsa, özellikle görüntünün kenarlarına yakın kısımlarda düz çizgiler kavisli görünebilir.
Link to this sectionDışsal (extrinsic) parametreler#
Dışsal kalibrasyon, bir kameranın gerçek dünyaya göre nasıl konumlandırıldığını ve yönlendirildiğini belirler; bu, 3D kalibrasyon, nesne takibi ve derinlik algısı için kullanılan çok kameralı sistemlerde özellikle önemlidir. Dronların, otonom araçların ve gözetim sistemlerinin uzamsal ilişkileri doğru bir şekilde yorumlamasına yardımcı olur.
İşte iki temel dışsal parametre:
- Öteleme matrisi (Translation matrix): Kameranın 3D uzaydaki fiziksel konumunu tanımlar ve X, Y ve Z eksenleri boyunca pozisyonunu belirtir. Yanlış kalibre edilirse, nesneler olduklarından daha yakın veya uzak görünebilir, bu da yanlış mesafe ölçümlerine yol açar. Otonom araçlarda bu durum zayıf engel algılamaya neden olabilirken, robotikte nesne manipülasyonu sırasında konumlandırma hatalarına yol açabilir.
- Dönme matrisi (Rotation matrix): Bir referans noktasına göre ne kadar eğik, döndürülmüş veya açılı olduğunu belirterek kameranın yönelimini tanımlar. Doğru kalibre edilmezse, birden fazla kameradan gelen görüntüler düzgün hizalanamayabilir; bu da 3D rekonstrüksiyon, çok kameralı takip ve uzamsal haritalamada sorunlara neden olur. Örneğin, bir sürücüsüz araçta, yanlış bir dönme matrisi sensör girişlerini yanlış hizalayarak hatalı şerit algılamasına yol açabilir.
Link to this sectionKamera kalibrasyon matrisini tanıma#
Bir kamera tarafından yakalanan her görüntü, 3D bir dünyanın 2D bir temsilidir. AI modellerinin doğru tahminler yapabilmesi için bu boyutlar arasında çeviri yapacak bir yola ihtiyacı vardır. İşte kamera kalibrasyon matrisi burada devreye girer. Gerçek dünya noktalarını kameranın görüntü düzlemine eşleyerek nesnelerin doğru bir şekilde konumlanmış görünmesini sağlar.
Basitçe söylemek gerekirse, kamera kalibrasyon matrisi, bir kameranın içsel parametrelerini temsil eden matematiksel bir modeldir. Genellikle vizyon sistemlerinde saklanır ve görüntü işleme algoritmalarında bozulmaları düzeltmek ve 3D noktaları 2D koordinatlara eşlemek için kullanılır.
Bir sonraki bölümde göreceğimiz gibi, matris; dama tahtası deseni algılama, 3D nesne tabanlı kalibrasyon ve bilinen referans noktalarının görüntülerini analiz ederek temel parametreleri tahmin eden AI destekli öz-kalibrasyon gibi kalibrasyon yöntemleri kullanılarak hesaplanır.
Link to this sectionÇeşitli kamera kalibrasyon yöntemleri#
Her biri belirli kullanım durumları için uygun olan çeşitli kamera kalibrasyon yöntemleri mevcuttur. Geleneksel yöntemler fiziksel desenlere dayanırken, AI destekli teknikler süreci otomatikleştirmek için derin öğrenmeyi kullanır.
Hadi bu yöntemleri inceleyelim ve farklı uygulamalarda doğruluğu nasıl artırdıklarını keşfedelim.
Link to this sectionGeleneksel kamera kalibrasyon yöntemleri#
En yaygın kamera kalibrasyon yöntemlerinden biri, kameranın önüne yerleştirilen bir dama tahtası veya ızgara deseni kullanır. Sistem, kalibrasyon parametrelerini hesaplamak için desendeki temel noktaları algılar.
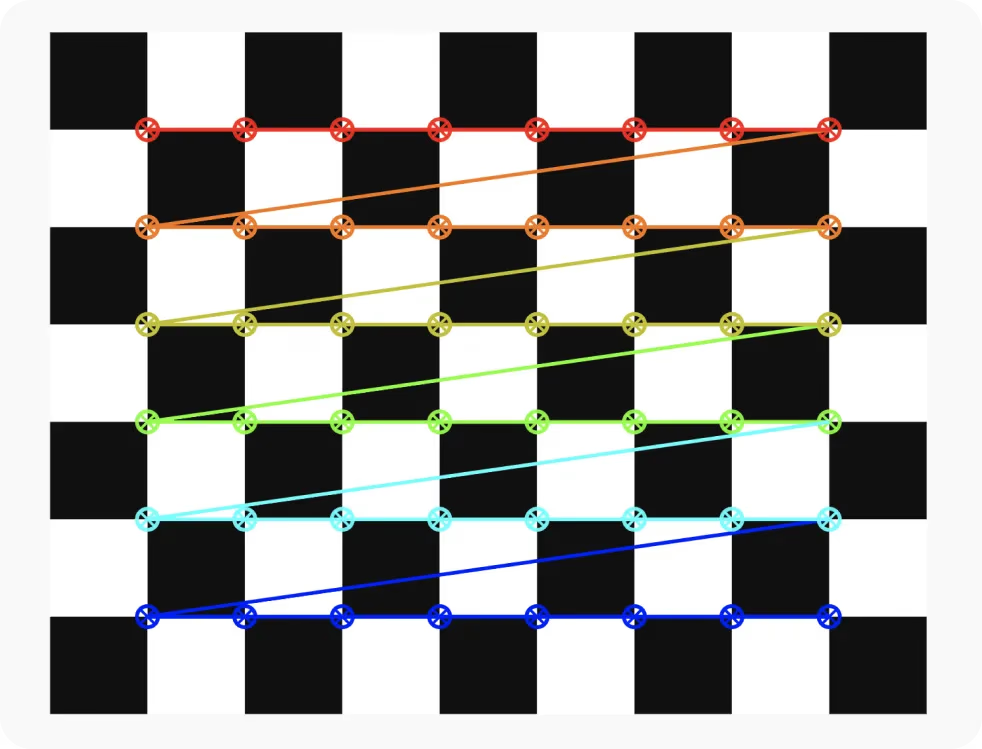
Şekil 3. Bir kamera kalibrasyon dama tahtası.
Kontrollü ortamlarda yararlı olsa da, manuel ayarlamalar ve farklı açılardan alınan birden fazla görüntünün analizini gerektirir. Işık koşullarındaki değişiklikler veya beklenmedik kamera hareketleri doğruluğu azaltabilir ve yeniden kalibrasyonu zorunlu hale getirebilir.
Dronlar ve sürücüsüz araçlar gibi dinamik ortamlarda, geleneksel kalibrasyon ayak uydurmakta zorlanır. Hareket eden bir kamera, hassasiyeti korumak için sık sık yeniden kalibrasyon gerektirir ki bu da statik desenlerle pratik değildir. Bu sınırlama, daha fazla esneklik ve otomasyon sunan AI destekli kamera kalibrasyonundaki gelişmeleri tetiklemiştir.
Link to this sectionAI destekli kamera kalibrasyon yöntemleri#
AI destekli teknikler, derin öğrenme modellerini kullanarak kendi kendine kalibrasyon yaparak kamera kalibrasyonunu otomatikleştirir ve manuel ayarlamalara olan ihtiyacı azaltır. Bu yöntemler, içsel ve dışsal parametreleri doğrudan gerçek dünya görüntülerinden tahmin ederek önceden tanımlanmış desenlere duyulan ihtiyacı ortadan kaldırır.
Benzer şekilde, sentetik veri setleri, AI modellerine parametreleri iyileştirmek ve bozulmaları düzeltmek için çeşitli, etiketlenmiş eğitim verileri sağlayarak kamera kalibrasyonunu dönüştürüyor. Bu veri setleri gerçek dünya koşullarını simüle ederek, AI modellerinin insan girdisi olmadan içsel ve dışsal parametreleri dinamik olarak ayarlamayı öğrenmesine yardımcı olur.
Örneğin, kendi kendine kalibre olan çerçeveler, monoküler görüntüleri analiz etmek, 3D yapıları tahmin etmek ve kalibrasyonu sürekli iyileştirmek için olasılıksal modeller ve derin öğrenme kullanır. Sentetik veriler, modelleri değişen perspektifleri, sensör yanlış hizalamalarını ve ışık koşullarını ele alacak şekilde eğiterek bu süreci geliştirir; böylece otonom sürüş ve robotik gibi uygulamalarda derinlik tahmini, engel takibi ve uzamsal doğruluk artar.

Şekil 4. Trafiği anlayabilen, kendi kendine kalibre olan bir vizyon AI sistemi.
Link to this sectionKamera kalibrasyonunun temel uygulamaları#
Artık kamera kalibrasyonunun ne olduğunu anladığımıza göre, çeşitli sektörlerdeki etkisini keşfedelim.
Link to this sectionOtonom araçlar ve dron navigasyonu#
Sürücüsüz araçlar ve otonom dronlar için hassas kamera kalibrasyonu, güvenli ve güvenilir navigasyon için önemlidir. Bu sistemler, engelleri algılamak, yol işaretlerini takip etmek ve çevredeki nesneleri değerlendirmek için derinlik tahmini ve mesafe hesaplamasına güvenir. Kötü kalibrasyon, mesafe yanlış yorumlamalarına neden olarak gerçek zamanlı senaryolarda hatalı kararlara yol açabilir.
Düzgün kalibre edilmiş bir matris, otonom araçların LiDAR, radar ve kameralardan gelen girdileri birleştirerek çoklu sensör füzyonunu iyileştirmesini sağlar. Bu, aracın yayalara, şerit sınırlarına ve yakındaki araçlara olan mesafeleri doğru bir şekilde ölçmesine yardımcı olarak kaza riskini azaltır. Bu arada, dronlarda 3D kalibrasyon, irtifa stabilitesini korumaya ve dinamik ortamlarda hassas navigasyon için nesneleri doğru bir şekilde takip etmeye yardımcı olur.

Şekil 5. Sürücüsüz bir araçta kalibre edilmiş bir kamera.
Link to this sectionArtırılmış gerçeklik (AR) ve sanal gerçeklik (VR)#
AR ve VR uygulamaları, dijital içeriği gerçek dünya nesneleriyle hizalamak için hassas kamera kalibrasyonuna güvenir. Düzgün kalibre edilmezse, AR katmanları kayabilir, yanlış hizalanmış görünebilir veya hatalı ölçeklenebilir, bu da kullanıcı deneyimini bozar.
Lens bozulması düzeltmesi, sanal nesnelerin gerçek ortamlara sorunsuz bir şekilde karışmasını sağlamak için anahtardır. Bu olmadan, bozulmalar oyunlarda, eğitim simülasyonlarında ve tıbbi görüntülemede sürükleyiciliği kırabilir ve doğruluğu azaltabilir. Üstelik VR'da kalibrasyon, kafa ve el hareketlerinin doğru bir şekilde takibini geliştirerek yanıt verme hızını artırır ve daha pürüzsüz, daha sürükleyici bir deneyim yaratır.

Şekil 6. Uzamsal ölçümleri iyileştirmek için kullanılan bir 3D kamera kalibrasyon kurulumu.
Link to this sectionRobotik görüş ve endüstriyel otomasyon#
Robotların dünyayı doğru bir şekilde görmesi ve etkileşime girmesi için uygun kamera kalibrasyonu çok önemlidir. Endüstriyel otomasyonda, robotlar nesneleri hassasiyetle almak, yerleştirmek ve manipüle etmek için derinlik tahminine güvenir. Uygun kalibrasyon olmadan, yanlış hizalamalar paketleme, montaj ve kalite kontrol denetimlerinde hatalara neden olabilir.
Robotikteki temel bir zorluk, düz nesneleri doğru bir şekilde ölçmektir. Kalibrasyon, robotik kolların tam boyutları algılamasına yardımcı olarak üretimi yavaşlatabilecek veya aksatabilecek yanlış hesaplamaları önler. 3D kalibrasyon, robotların nesneler veya konumlar değiştikçe uyum sağlamasına olanak tanıyarak bunu bir adım öteye taşır.
Link to this sectionÖne çıkanlar#
Kamera kalibrasyonu, birçok bilgisayarlı görü çözümünün kritik bir bileşenidir. AI modellerinin nesne algılama, takip ve derinlik tahmini gibi görevler için görüntüleri doğru bir şekilde yorumlamasını sağlar. İçsel ve dışsal parametreler, AI destekli uygulamaları etkileyebilecek bozulmaları önlemek için görüntüleri gerçek dünya ölçümleriyle hizalamaya yardımcı olur.
Lens bozulması düzeltmesi; artırılmış gerçeklik uygulamaları, endüstriyel otomasyon ve çok kameralı sistemler için kritiktir. AI ilerledikçe, otomatik kamera kalibrasyon yöntemleri gerçek dünya uygulamalarında verimliliği, doğruluğu ve uzun vadeli güvenilirliği artırmaktadır.






