Görsel yapay zeka kullanarak top yörüngesi tahminini geliştirmek
Görsel yapay zekanın top yörüngesi tahminini nasıl iyileştirdiğini ve spor, robotik ve diğer akıllı uygulamalar için gerçek zamanlı içgörülere nasıl olanak tanıdığını öğren.

En sevdiğin basketbol oyuncusu şut çektiğinde, topun sepete girip girmeyeceğini genellikle anlayabilirsin. Bir insan olarak bunu tahmin edebilirsin çünkü muhtemelen birçok basketbol maçı izledin ve ne beklemen gerektiğini biliyorsun. Şimdi bir makinenin bir kamerayla basketbol maçını izlediğini ve şutun sepete girip girmeyeceğini anlamaya çalıştığını hayal et.
Bu çok daha karmaşık. Deneyim yoluyla geliştirdiğimiz görsel zekayı kopyalamak göründüğü kadar basit değil. Aslında top yörüngesi tahmini, makinelerin bir topun nereye düşeceğini tahmin etmek için hareketi, dönüşü ve açıyı nasıl analiz edebileceğini araştıran büyüleyici bir araştırma alanıdır.

Şekil 1. Bir basketbol şutunun yörüngesi. (Kaynak)
1537 yılı gibi erken bir tarihte, İtalyan matematikçi Niccolò Tartaglia, bir gülle ateşlendiğinde 45 derecelik açıyla en uzağa gittiğini keşfetti. Bulguları, bugün hareketi ve tahmini anlama biçimimizin temelini oluşturdu.
Şimdi, bilgisayar bilimleri ve yapay zeka (AI) alanındaki gelişmelerle birlikte makineler, bir topun yörüngesini doğru ve gerçek zamanlı olarak tahmin edebiliyor. Yapay zeka sistemleri; topun konumu, hızı, dönüşü ve açısı gibi detayları analiz ederek nereye düşeceğini tahmin edebilir. Bu, oyuncu eğitiminden performans analizine, sağlıktan robotiğe kadar pek çok uygulamada yardımcı olur.
Özellikle, bilgisayarlı görü, makinelerin etraflarındaki dünyadan gelen görsel bilgileri yorumlamasına ve anlamasına yardımcı olan bir yapay zeka alanıdır. Sistemlerin nesneleri tanımasını, hareketlerini izlemesini ve kameralar veya video aracılığıyla gördüklerini anlamlandırmasını sağlayan şey budur.
Top yörüngesi tahminine uygulandığında, Ultralytics YOLO11 ve Ultralytics YOLO26 gibi bilgisayarlı görü modelleri, bir sistemin topu kare kare algılamasına ve izlemesine yardımcı olabilir. Bu görsel veriler, topun her karedeki konumu hakkında doğru bilgiler sağlar ve bunlar daha sonra zaman içindeki hızını ve yönünü tahmin etmek için kullanılabilir. Yapay zeka modelleri ve çeşitli algoritmalar, topun bir sonraki konumunu tahmin etmek için bu verileri kullanabilir.
Bu makalede, top yörüngesi tahminini, ilgili çeşitli yaklaşımları ve bilgisayarlı görünün rolünü keşfedeceğiz. Haydi başlayalım!
Link to this sectionTop yörüngesi tahmininin önemi#
İlginç bir araştırma alanı olmanın ötesinde, top yörüngesi tahmini pek çok alanda pratik ve etkili teknolojilerin geliştirilmesine yön veriyor. Örneğin, otonom araçlarda yörünge tahmini, arabaların diğer araçların, bisikletlilerin ve yayaların gelecekteki yollarını tahmin etmesini sağlar. Bu hareketli nesnelerin önümüzdeki birkaç saniye içinde nerede olacaklarını tahmin ederek, sürücüsüz sistemler hızı ayarlayarak, şerit değiştirerek veya olası çarpışmalardan önceden kaçınarak daha güvenli ve daha verimli kararlar alabilir.
Benzer şekilde, robotikte top yörüngesi tahmini, makinelerin hareketli nesneleri yüksek hassasiyetle algılamasını, izlemesini ve tepki vermesini mümkün kılar. Bu, özellikle endüstriyel robotlar veya teslimat dronları gibi hızlı hareket eden öğeleri gerçek zamanlı olarak işlemesi gereken otomatik sistemlerde kullanışlıdır.
Link to this sectionTop yörüngesi tahmininin nasıl çalıştığına dair bir genel bakış#
Peki, bir topun yörüngesini tahmin etmek aslında nasıl çalışır? Bu, kullanılan yönteme bağlıdır. Genel olarak, her yaklaşım aynı şeyi amaçlar: topun şu an nasıl hareket ettiğini anlamak ve bir sonraki konumunu tahmin etmek.
İşte kullanılan farklı yaklaşımlardan bazılarına bir bakış:
- Fizik tabanlı modelleme: Bu yaklaşım, hız, fırlatma açısı, yerçekimi ve hava direnci gibi faktörlerin topun uçuş yolunu nasıl etkilediğini hesaplamak için hareket ve aerodinamik yasalarını kullanır.
- Makine öğrenimi modelleri: Bu modeller, topun nasıl hareket ettiğine dair kalıpları öğrenmek için geniş hareket verisi kümelerini analiz eder ve açık fiziksel denklemlere güvenmek zorunda kalmadan doğru tahminler yapmalarına olanak tanır.
- Bilgisayarlı görü tabanlı tahmin: Bu yöntem, topu kare kare algılamak ve izlemek için video görüntülerini kullanır; bu sayede algoritmaların hızını, yönünü ve gelecekteki konumunu tahmin etmesine yardımcı olan görsel veriler üretir.
- Sensör tabanlı sistemler: Bu sistemler, topun konumunu, hızını ve dönüşünü gerçek zamanlı olarak hassas bir şekilde ölçmek için hareket sensörlerinden, radardan veya kızılötesi kameralardan gelen verileri kullanır.
- Hibrit yöntemler: İki veya daha fazla tekniği birleştirirler. Örneğin, daha doğru ve güvenilir yörünge tahminleri elde etmek için bilgisayarlı görüyü fizik tabanlı modelleme ile entegre etmek gibi.
Bir sonraki adımda, bilgisayarlı görü tabanlı top yörüngesi tahmininin nasıl çalıştığına ve bunu mümkün kılan algoritmalara daha yakından bakacağız.
Link to this sectionTop yörüngesi tahmininin temelleri#
Bilgisayarlı görünün top yörüngesi tahmininde nasıl bir rol oynadığına ve bu sistemlerin nasıl çalıştığına bakmadan önce temel bilgileri inceleyelim.
Top yörüngesi tahmini genellikle iki ana bölümden oluşur: izleme ve hareket modelleme. İzleme algoritmaları, bir videodaki topu kare kare takip etmek ve bir sonraki konumunu tahmin etmek için kullanılır. Bu yöntemler, kısa vadeli ve gerçek zamanlı tahminler için kullanışlıdır.
Diğer yandan, hareket modelleme yöntemleri (genellikle fizik veya makine öğrenimi içeren) bir adım daha ileri gider. Bu yöntemler, topun düşeceği yer de dahil olmak üzere tam yolunu tahmin etmeyi amaçlar.
Basitçe ifade etmek gerekirse, izleme topun mevcut konumunu ve hareketini belirlerken, modelleme bu bilgiyi gelecekteki yolunu ve iniş noktasını tahmin etmek için kullanır. Birlikte, doğru ve gerçek zamanlı top yörüngesi tahminini mümkün kılarlar.
Link to this sectionİzleme ve hareket modellemeye daha yakından bakış#
İzleme ve tahmin arasındaki ayrımın neden önemli olduğunu merak ediyor olabilirsin. Bu konuyu daha derinlemesine incelediğimizde, birçok izleme algoritmasının sadece izlemekle kalmadığını fark edeceksin. Ayrıca topun bir sonraki konumunun neresi olacağına dair kısa vadeli tahminler de yaparlar.
Örneğin, ByteTrack veya SORT gibi izleme algoritmaları aracılığıyla nesne takibini destekleyen YOLO11 gibi bilgisayarlı görü modelleri, topun bir sonraki konumunu gerçek zamanlı olarak tahmin etmek için her video karesinden gelen algılama verilerini kullanır. Bu, top hızlı hareket ettiğinde veya kısmen gizlendiğinde bile sistemin doğru takibi sürdürmesine yardımcı olur.
Ancak, bu modeller hareketi takip etmede çok iyi olsalar da, genellikle tüm uçuş yolunu veya iniş noktasını değil, yalnızca topun bir sonraki konumunu tahmin ederler. İşte hareket modelleme yöntemlerinin vazgeçilmez hale geldiği nokta burasıdır.
Başka bir deyişle, bir bilgisayarlı görü modeli tek başına bir topun yörüngesini tam olarak tahmin edemez. Topun konumunu kare kare algılayabilir ve izleyebilir, ancak yerçekimi, dönüş, sürüklenme veya hava direnci gibi hareketini etkileyen fiziksel kuvvetleri hesaba katmaz.
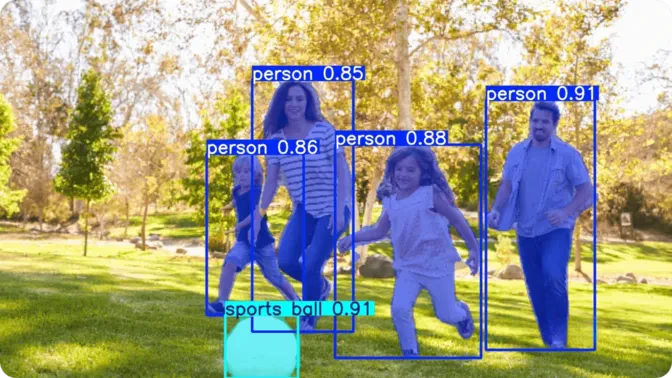
Şekil 2. YOLO11 kullanılarak yapılan top algılama ve segmentasyon örneği. (Kaynak)
Doğru uzun vadeli tahminler yapmak için, bilgisayarlı görüden elde edilen görsel veriler genellikle hareket modelleme yöntemleriyle birleştirilir. Bu yöntemler, topun zaman içindeki hareketini analiz etmek ve nereye düşeceği de dahil olmak üzere tam yolunu tahmin etmek için ya fizik tabanlı denklemleri ya da makine öğrenimi algoritmalarını kullanır.
Link to this sectionBilgisayarlı görüde top takibi için kullanılan yaygın algoritmalar#
İzleme algoritmaları, top yörüngesi tahmin sistemlerinin çok önemli bir parçasıdır. Kısa süreli tıkanıklık (topun başka bir nesne tarafından geçici olarak görünmez hale gelmesi) gibi zorlukları ele alırken, topun zaman içindeki konumunu ve hareketini tahmin ederler.
Bir sonraki adımda, bazı yaygın izleme algoritmalarını inceleyeceğiz.
Link to this sectionKalman Filtresi#
Kalman Filtresi, ölçümler gürültülü veya eksik olsa bile bir nesnenin konumunu ve hızını zaman içinde tahmin etmek için kullanılan matematiksel bir algoritmadır. Örneğin NASA, uçuş araçlarının yollarını izlemek ve yeniden oluşturmak için Kalman Filtrelerini kullanmıştır.
Sensör verilerini araç hareketi modelleriyle birleştirerek sistem, gürültülü verileri temizleyebilir, gerçek uçuş yörüngesini doğru bir şekilde yeniden oluşturabilir ve aracın bir sonraki konumunun neresi olacağına dair kısa vadeli tahminler yapabilir. Bu, filtreleri birçok alanda gerçek zamanlı izleme ve kontrol için çok kullanışlı hale getirir.
Kalman Filtresi kendi başına bir bilgisayarlı görü algoritması olmasa da, bir top gibi hareket eden nesneleri video kareleri boyunca izlemek için görü tabanlı sistemlerde yaygın olarak kullanılır. Nesnenin bir sonraki konumunun neresi olacağını tahmin ederek, bu tahmini gerçek algılama verileriyle karşılaştırarak ve ardından doğruluğu korumak için tahminini güncelleyerek çalışır. Bu sürekli tahmin ve düzeltme döngüsü, nesne kısaca görünmez olsa veya hızını aniden değiştirse bile onu gerçek zamanlı takip için etkili kılar.
Link to this sectionByteTrack#
ByteTrack, top gibi hareket eden nesneleri video kareleri boyunca izlemek için kullanılan gerçek zamanlı bir nesne izleme algoritmasıdır. Her karedeki nesneleri algılayarak ve aynı nesnenin algılamalarını zaman içinde birbirine bağlayarak "tracklet" adı verilen sürekli bir dizi oluşturur.
Tracklet, nesnenin nerede olduğunu ve nasıl hareket ettiğini gösteren kısa bir kare dizisidir. Bu bağlantı süreci, sistemin video boyunca her nesne için tutarlı bir kimlik korumasına yardımcı olur.
Düşük güvenilirlikli algılamaları atan eski izleme yöntemlerinin aksine, ByteTrack bunları tutar ve yeniden kontrol eder. Bu, nesneler hızla hareket ettiğinde, bulanıklaştığında veya kısaca gizlendiğinde bile pürüzsüz ve kararlı bir izleme sağlayabileceği anlamına gelir. ByteTrack tek başına bir nesne dedektörü olmasa da, nesneleri gerçek zamanlı olarak doğru ve güvenilir bir şekilde izlemek için genellikle Ultralytics YOLOv8 veya YOLO11 gibi bilgisayarlı görü modelleriyle birlikte kullanılır.
Link to this sectionBoT-SORT#
BoT-SORT, sistemlerin hareketli nesneleri video kareleri boyunca izleme biçimini geliştiren gelişmiş bir çoklu nesne izleme algoritmasıdır. ByteTrack üzerine inşa edilmiştir ve kamera hareketi telafisi ve nesne yeniden tanımlama gibi temel özellikler ekler.
Kamera hareketi telafisi, kaydırma veya sarsıntı gibi kamera hareketlerini düzeltmeye yardımcı olurken, yeniden tanımlama sistemin aynı nesneyi görüş alanından çıkıp tekrar göründükten sonra bile tanımasını ve izlemeye devam etmesini sağlar. ByteTrack gibi, o da YOLOv8 veya YOLO11 gibi modellerle birlikte kullanılır.
Link to this sectionYaygın yörünge tahmin yöntemleri#
Artık izlemenin nasıl çalıştığını ve bunun bir topun yörüngesini tahmin etmeyle nasıl bağlantılı olduğunu gördüğümüze göre, topun hareketini tahmin etmek için kullanılan ana yörünge tahmin algoritmaları ve yöntemlerine daha yakından bakalım.
Link to this sectionFizik tabanlı kinematik modelleme#
Fizik tabanlı kinematik modelleme, topun yörüngesini temel hareket yasalarını kullanarak tahmin eder. Uçuş yolunu hesaplamak için topun başlangıç hızı, fırlatma açısı, yerçekimi, hava direnci ve dönüş gibi faktörleri dikkate alır. Bu faktörleri birleştirerek model, topun herhangi bir anda nerede olacağını, ne kadar hızlı hareket edeceğini ve hangi yöne gideceğini tahmin eder.
Örneğin, beyzbol veya golf gibi sporlarda, savurma hızına ve fırlatma açısına bağlı olarak topun ne kadar uzağa ve hangi yöne gideceğini tahmin etmeye yardımcı olur. Kontrollü ortamlarda oldukça doğru olsa da, rüzgar, sekme veya oyuncu etkileşimleri gibi öngörülemeyen gerçek dünya koşullarıyla mücadele edebilir ve tahmin hatalarına neden olabilir.
Bilgisayarlı görü ile birleştirildiğinde, fizik model tabanlı yöntemler spor analitiği ve hakemlikte pratik uygulamaları mümkün kılar. Örneğin Hawk-Eye, bir topun 3D yörüngesini gerçek zamanlı olarak yeniden oluşturan çok kameralı bir görü sistemidir.
Topun konumunu birden fazla açıdan yakalamak için birkaç senkronize yüksek hızlı kamera kullanır ve yolunu tahmin etmek için üçgenleme, kinematik denklemler ve enterpolasyon yöntemleri uygular. Bu entegrasyon, yörünge doğruluğunun çizgi kararları ve performans analizi için gerekli olduğu tenis, kriket ve futbol dahil olmak üzere sporlarda hassas izlemeyi ve karar vermeyi destekler.
Link to this sectionMakine öğrenimi regresyon modelleri#
Makine öğrenimi regresyon modelleri, açık fiziksel denklemlere güvenmeden bir topun gelecekteki konumunu veya yörüngesini tahmin edebilir. Bunun yerine, video tabanlı izleme sistemleri veya sensörler aracılığıyla toplanan konum, hız, dönüş ve açı gibi verilerden kalıpları öğrenirler.
Bilgisayarlı görü izleme algoritmalarıyla birleştirildiğinde, görü sistemi topun konumunu video kareleri boyunca yakalar. Bu konumsal veriler, topun hareketinin zamanla nasıl değiştiğini öğrenen regresyon modeli için girdi haline gelir. Model eğitildikten sonra, gözlemlediklerine dayanarak topun bir sonraki konumunu veya genel yolunu tahmin edebilir.
Masa tenisi robotları veya pinpon robot sistemleri söz konusu olduğunda, binlerce izlenen yörünge üzerinde eğitilen regresyon modellerinin, topun uçuş ve sekme kalıplarını gerçek zamanlı olarak tahmin ettiği gösterilmiştir. Bu, robotun pinpon topunu veya masa tenisi topunu yakalamak veya geri göndermek için kendini konumlandırmasına veya hızlı tepki vermesine olanak tanır. Bu modeller doğrudan gerçek dünya örneklerinden öğrendikleri için, dönüş, hava sürüklenmesi veya yüzey teması gibi öngörülemeyen etkileri genellikle saf fizik tabanlı yöntemlerden daha iyi ele alırlar.
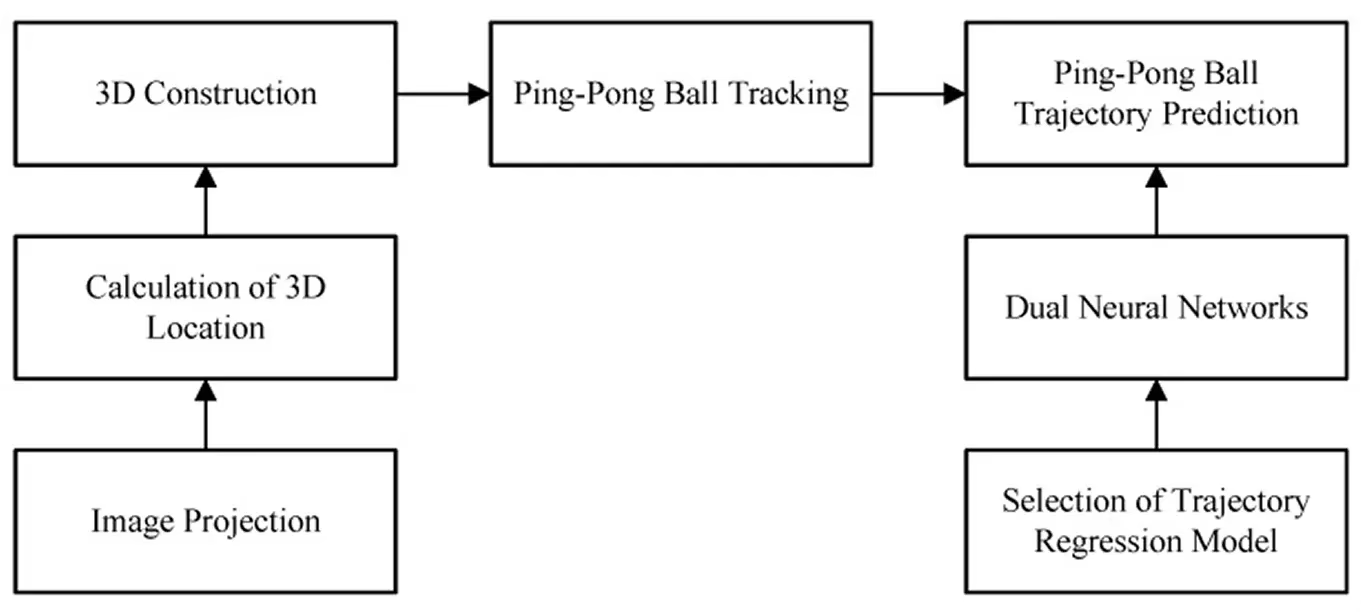
Şekil 3. Bir pinpon robotu topun yörüngesini nasıl tahmin eder. (Kaynak)
Link to this sectionTekrarlayan Sinir Ağları (RNN) ve Uzun Kısa Süreli Bellek (LSTM) ağları#
Tekrarlayan Sinir Ağları (RNN) ve Uzun Kısa Süreli Bellek (LSTM) ağları, hareket veya diğer zaman serisi bilgileri gibi zamanla değişen verileri işlemek için tasarlanmış yapay zeka modelleridir. Daha önce ne olduğunu hatırlayabilirler, bu da hareket kalıplarını tanımalarına ve bir sonraki adımda ne olacağını tahmin etmelerine yardımcı olur.
Top yörüngesi tahmininde, bu modeller bir topun geçmişteki konumlarının, hızlarının ve dönüşlerinin bir sonraki hamlesini nasıl etkileyeceğini öğrenir. Bilgisayarlı görü ve nesne takibi ile birleştirildiğinde, bir görü sistemi topun kareler boyunca konumlarını yakalayabilir. Bir RNN, topun bir sonraki hamlesini veya tam yolunu tahmin etmek için bu konum dizisini kullanabilir.
Ayrıca LSTM'ler, bilgileri daha uzun süreler boyunca hatırlayabildikleri için özellikle etkilidir. Bu, hızlı hareket ettiğinde veya yön değiştirdiğinde bile topun tam hareketini takip etmelerini sağlar.
Son araştırmalar bu fikri bir adım daha ileri götürdü. Bilim insanları, oyuncuların nasıl hareket ettiğini ve birbirleriyle nasıl etkileşime girdiğini analiz ederek takım sporlarında top yörüngelerini tahmin edebilen Hiyerarşik Bi-LSTM modelleri geliştirdiler. Bu modeller, oyuncu davranışındaki kalıpları kullanarak topun en olası yerini çıkarsayabilir ve top geçici olarak gizlendiğinde veya görüş dışı kaldığında bile konumunu tahmin edebilir.
Link to this sectionTop yörüngesi tahmininin gerçek dünya uygulamaları#
Bilgisayarlı görü ve top yörüngesi tahmini hakkında daha iyi bir anlayışla, spor, rehabilitasyon ve robotik gibi alanlardaki pratik uygulamalarını keşfedelim.
Link to this sectionSpor dallarında top yörüngesi tahmini#
Bir topun nasıl hareket ettiğini ve nereye düşeceğini anlamak birçok sporda çok önemlidir. Kameralardan ve sensörlerden gelen bilgileri kullanarak yapay zeka modelleri, topun yolunu ve ilk hızını tahmin edebilir; bu da spor takımlarının oyunları tahmin etmelerine, tekniklerini geliştirmelerine ve daha akıllı kararlar almalarına yardımcı olur.
Ayrıca, dönüş veya bırakma açısı gibi faktörleri analiz ederek sporcu eğitimini destekler, atletlerin performanslarını iyileştirmelerine ve sakatlanmalardan kaçınmalarına yardımcı olur. Birçok son teknoloji spor eğitim sistemi artık beceri gelişimini ve stratejiyi geliştirmek için top yörüngesi tahminini kullanıyor.
Örneğin araştırmacılar, tenis robotları için tenis topunun yolunu algılayabilen ve tahmin edebilen bir bilgisayarlı görü sistemi geliştirdiler. Stereo kameralar ve evrişimli sinir ağları kullanan sistem, robotun topu üç boyutta (x ekseni, y ekseni ve z ekseni) görmesine ve oyun sırasında daha doğru tepki vermesine yardımcı oluyor. Bu, oyuncuları müsabakalara hazırlamak için oyunun kurallarını değiştiren bir araç olabilir.
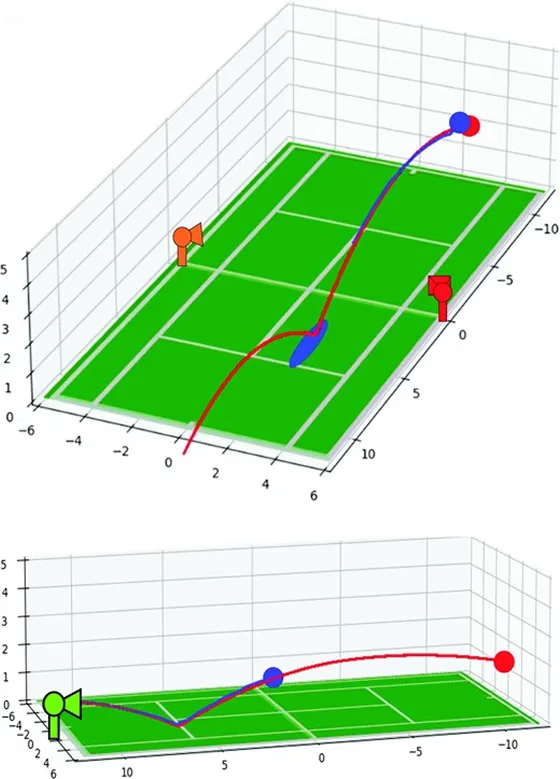
Şekil 4. Kırmızı renk simüle edilmiş yolu; mavi renk ise robotun top yörüngesi tahminini gösterir. (Kaynak)
Link to this sectionBilgisayarlı görü tabanlı top yörüngesi tahmininin avantajları ve dezavantajları#
Bilgisayarlı görü tabanlı top yörüngesi tahmin sistemlerini kullanmanın bazı temel avantajları şunlardır:
- Gerçek zamanlı tahminleme: Bu sistemler, yüksek hızlarda bile topun gelecekteki yolunu anında doğru bir şekilde tahmin edebilir.
- Girişimsel olmayan: Fiziksel sensörlere veya işaretleyicilere ihtiyaç duymadan, yalnızca video girdisiyle çalışabilirler.
- Ölçeklenebilir ve uyarlanabilir: Görüş tabanlı top yörüngesi tahmin sistemleri, standart kamera kurulumları kullanılarak farklı spor dallarında ve ortamlarda uygulanabilir.
Bilgisayarlı görü tabanlı top yörüngesi tahmininin birçok faydası olsa da, dikkate alınması gereken bazı sınırlamalar da vardır. Akılda tutulması gereken bazı faktörler şunlardır:
- Tıkanıklık zorlukları: Top, oyuncuların veya diğer nesnelerin arkasında gizlendiğinde tahminler genellikle daha az doğru hale gelebilir.
- Aydınlatma ve görünürlük sorunları: Bu sistemlerin performansı, gece olduğu gibi yetersiz aydınlatma veya karmaşık arka planlar altında düşük olabilir.
- Yüksek hesaplama talebi: Yüksek kare hızına sahip video ve derin öğrenme modellerini işlemek, pahalı olabilen güçlü donanım gerektirir.
Link to this sectionÖne çıkanlar#
Görü tabanlı yapay zeka ile bir topun yörüngesini tahmin etmek, hareketi olağanüstü bir doğrulukla anlamak ve tahmin etmek için fiziği, bilgisayarlı görüyü ve makine öğrenimini bir araya getirir. Spor performansını analiz etmekten, hasta iyileşmesine ve endüstriyel otomasyon sistemlerine yardımcı olmaya kadar, yörünge tahmini görsel verileri eyleme dönüştürülebilir içgörülere dönüştürür. Teknoloji ilerlemeye devam ettikçe, performansı, güvenliği ve karar vermeyi geliştiren daha akıllı, daha hızlı ve daha uyarlanabilir yöntemlerin önünü açıyor.
Büyüyen topluluğumuzun bir parçası ol ve uygulamalı yapay zeka kaynakları için GitHub depomuzu keşfet. Bugün görü tabanlı yapay zeka ile geliştirme yapmak için lisanslama seçeneklerimizi incele. Çözüm sayfalarımızı ziyaret ederek tarımda yapay zekanın çiftçiliği nasıl dönüştürdüğünü ve robotikte Görü Tabanlı yapay zekanın geleceği nasıl şekillendirdiğini öğren.






