Bilgisayarlı görü modelleri kullanarak mesafe nasıl hesaplanır?
Ultralytics YOLO11 kullanarak bilgisayarlı görü uygulamalarındaki mesafe hesaplamasının nesnelerin yakınlığını gerçek zamanlı olarak ölçmeye nasıl yardımcı olduğunu öğren.
Karşıdan karşıya geçerken size doğru gelen bir araba gördüğünüzde, onun yaklaşık olarak ne kadar uzakta olduğunu anında anlayabilirsiniz. Bu hızlı, neredeyse içgüdüsel yargı, çevrenize dair mekansal anlayışınız sayesindedir. Bu hisse dayanarak hızlanmaya, durmaya veya yürümeye devam etmeye karar verebilirsiniz.
Benzer şekilde, bilgisayarlı görü, makinelerin görsel verileri yorumlayarak çevrelerini anlamalarını mümkün kılan bir yapay zeka (YZ) dalıdır. Tıpkı bir arabanın yakınlığını değerlendirip hızlı kararlar verebildiğiniz gibi, bilgisayarlı görü modelleri de görüntüleri ve videoları analiz ederek makinelerin etraflarındaki dünyayı algılamalarına ve ona tepki vermelerine yardımcı olabilir.
Örneğin, Ultralytics YOLO11, görüntülerdeki ve videolardaki nesneleri gerçek zamanlı olarak tespit edebilen ve takip edebilen bir bilgisayarlı görü modelidir. Basitçe ifade etmek gerekirse YOLO11, görüntüyü parçalar halinde değil, bir bütün olarak değerlendirerek çalışır; bu da onu daha hızlı ve verimli kılar. Ayrıca örneklem bölümleme (instance segmentation), poz tahmini ve görüntü sınıflandırma gibi bilgisayarlı görü görevlerini de yerine getirebilir.
Özellikle YOLO11'in yetenekleri, nesnelerin birbirlerinden ne kadar uzakta olduğunu hesaplamak için kullanılabilir; bu da üretim, perakende ve kalabalık yönetimi gibi birçok alanda güvenlik ve verimliliği artırmaya yardımcı olur.
Bu makalede, YOLO11'in bilgisayarlı görü uygulamalarında mesafe hesaplama için nasıl kullanılabileceğini, bunun neden önemli olduğunu ve farklı endüstriler üzerindeki etkisini inceleyeceğiz.
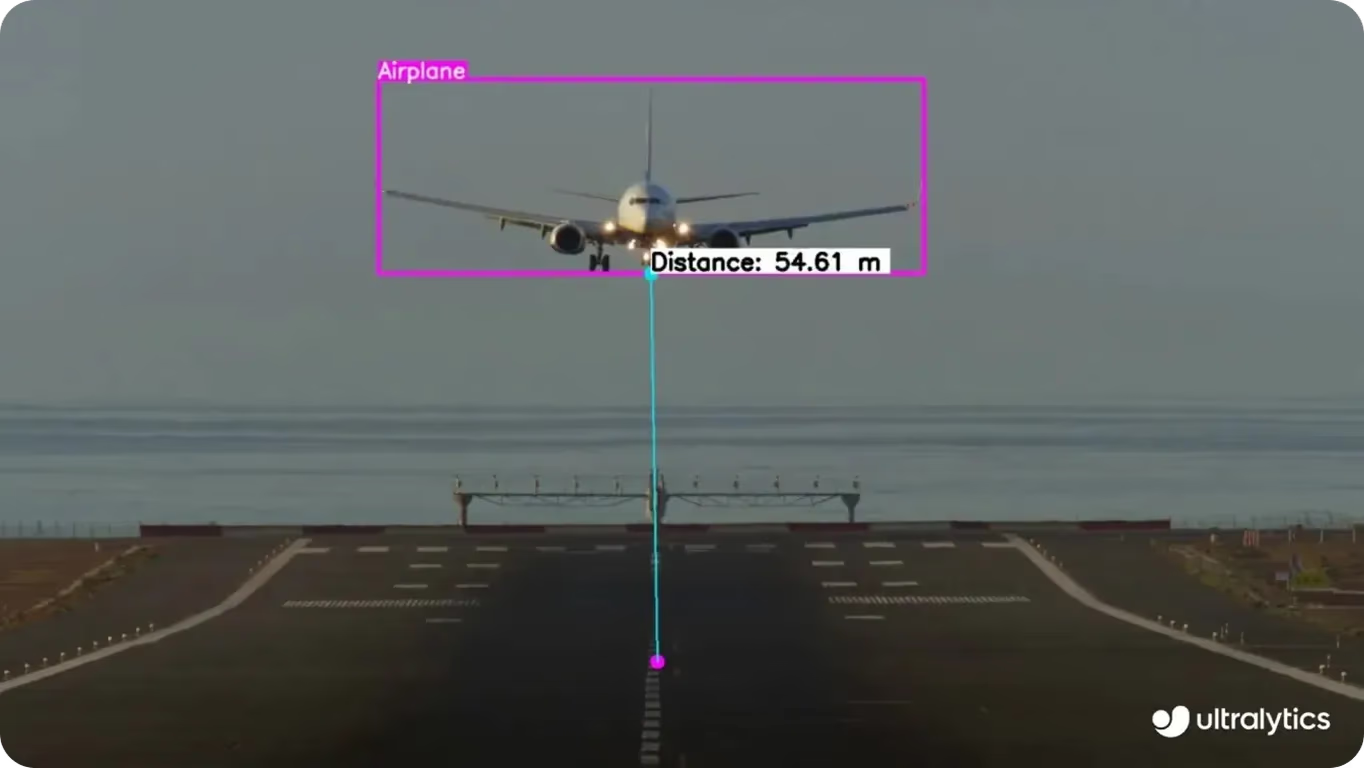
Şekil 1. Bir uçağın iniş mesafesini hesaplamak için YOLO kullanımına dair bir örnek.
Link to this sectionBilgisayarlı görüde mesafe hesaplamaya genel bakış#
Bilgisayarlı görüde mesafe hesaplama, bir görüntüdeki iki nesne arasındaki piksellerin tespit edilmesini, konumlandırılmasını ve ölçülmesini içerir. Pikseller, dijital bir görüntüyü oluşturan bireysel birimlerdir ve her biri belirli bir renk veya yoğunluk değerine sahip tek bir noktayı temsil eder.
Piksel ölçümlerini gerçek dünya mesafelerine dönüştürmek için kalibrasyon kilit rol oynar. Bunu bir şeyi ölçmek için cetvel kullanmaya ve ardından bu ölçümü diğer nesnelerin boyutunu anlamak için kullanmaya benzetebilirsin. Bilinen boyutlara sahip nesneleri referans alarak kalibrasyon, pikseller ile gerçek fiziksel mesafeler arasında bir bağlantı kurar.
Bunun nasıl çalıştığını görmek için bir örneğe bakalım. Aşağıdaki görüntüde madeni para referans nesnesidir ve boyutu (0,9 inç x 1,0 inç) bilinmektedir. Diğer nesnelerin piksel ölçümlerini madeni paranın boyutuyla karşılaştırarak gerçek dünyadaki boyutlarını hesaplayabiliriz.
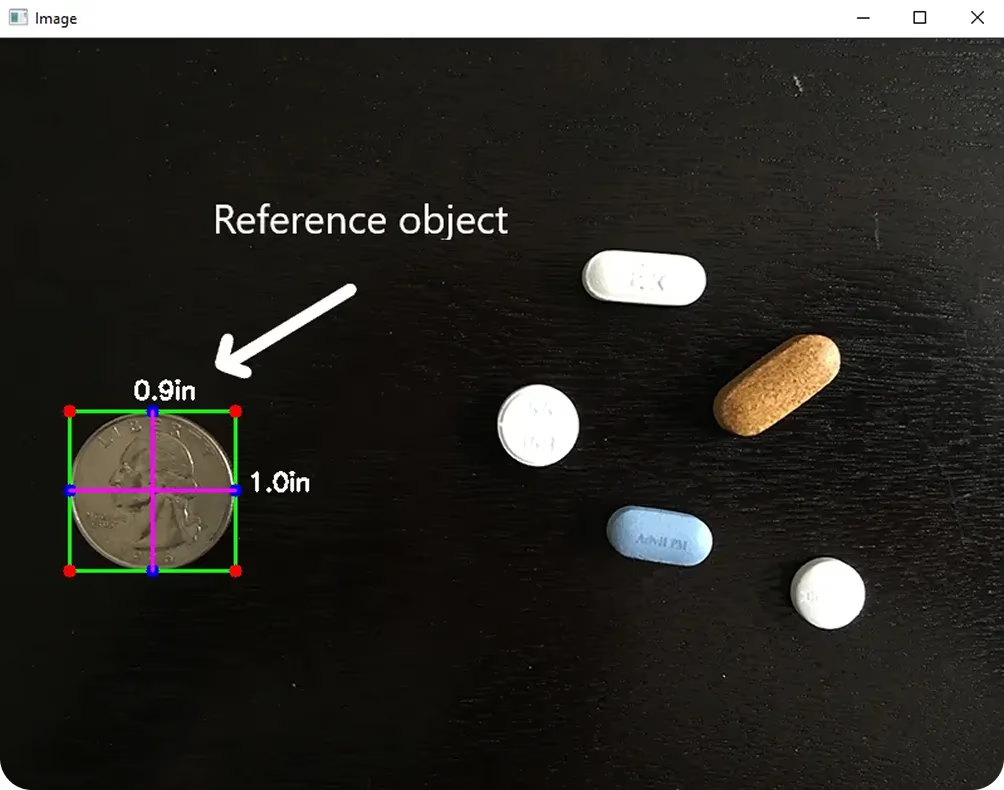
Şekil 2. Bir madeni para, diğer nesnelerin gerçek dünya boyutunu ölçmek için referans olarak kullanılabilir.
Bununla birlikte mesafe hesaplama iki boyutlu (2D) bir düzlemde yapılır, yani sadece nesneler arasındaki yatay ve dikey mesafeleri ölçer. Bu, nesnelerin kameradan olan uzaklıkları da dahil olmak üzere üç boyutlu uzaydaki mesafelerini ölçen derinlik tahmininden farklıdır.
Derinlik kameraları gerçek derinliği ölçüp daha detaylı mekansal bilgi verebilse de birçok durumda basit, kalibre edilmiş bir mesafe yeterlidir. Örneğin, 2D düzlemdeki nesnelerin birbirlerinden ne kadar uzakta olduğunu bilmek, nesne takibi veya kuyruk yönetimi gibi görevler için gayet iyi çalışır; bu nedenle bu durumlarda derinlik tahminine ihtiyaç duyulmaz.
Link to this sectionYOLO11 kullanarak mesafe hesaplamanın nasıl çalıştığını anlamak#
Şimdi, YOLO11’in nesne tespiti ve takip desteğini kullanarak iki nesne arasındaki mesafenin nasıl hesaplanacağına bakalım. İşte adım adım açıklaması:
- Nesneleri tespit etme ve takip etme: YOLO11, bir karedeki nesneleri tanıyarak ve videodaki kareler boyunca hareketlerini izleyerek nesneleri tespit etmek için kullanılabilir. Her nesneye benzersiz bir takip kimliği (track ID) atar, bu da sistemin video boyunca konumlarını ve hareketlerini izlemesini sağlar.
- Sınırlayıcı kutular (Bounding boxes): Sınırlayıcı kutular, YOLO11’in nesne tespiti sonuçlarına dayanarak tespit edilen nesnelerin etrafına çizilir ve görüntüdeki konumlarını belirler.
- Nesne seçimi: Odaklanılacak iki nesne seçilebilir ve YOLO11, nesneler gerçek zamanlı olarak hareket ettikçe sınırlayıcı kutuları günceller.
- Merkez noktası (Centroid) hesaplama: Merkez noktaları (iki nesnenin sınırlayıcı kutularının merkez noktaları), sınırlayıcı kutu köşelerinin koordinatlarına göre hesaplanarak nesnelerin konumlarını temsil eder.
- Mesafe hesaplama: İki nesnenin merkez noktaları daha sonra aralarındaki Öklid mesafesini hesaplamak için kullanılabilir. Öklid mesafesi, 2D bir düzlemde iki nokta arasındaki düz hat mesafesidir ve hem yatay hem de dikey yönlerdeki farklar kullanılarak hesaplanır. Bu, iki nesne arasındaki mesafeyi piksel cinsinden verir.
Bu yöntemle hesaplanan mesafelerin, 2D piksel ölçümlerine dayandığı için sadece birer tahmin olduğunu unutmamak önemlidir.
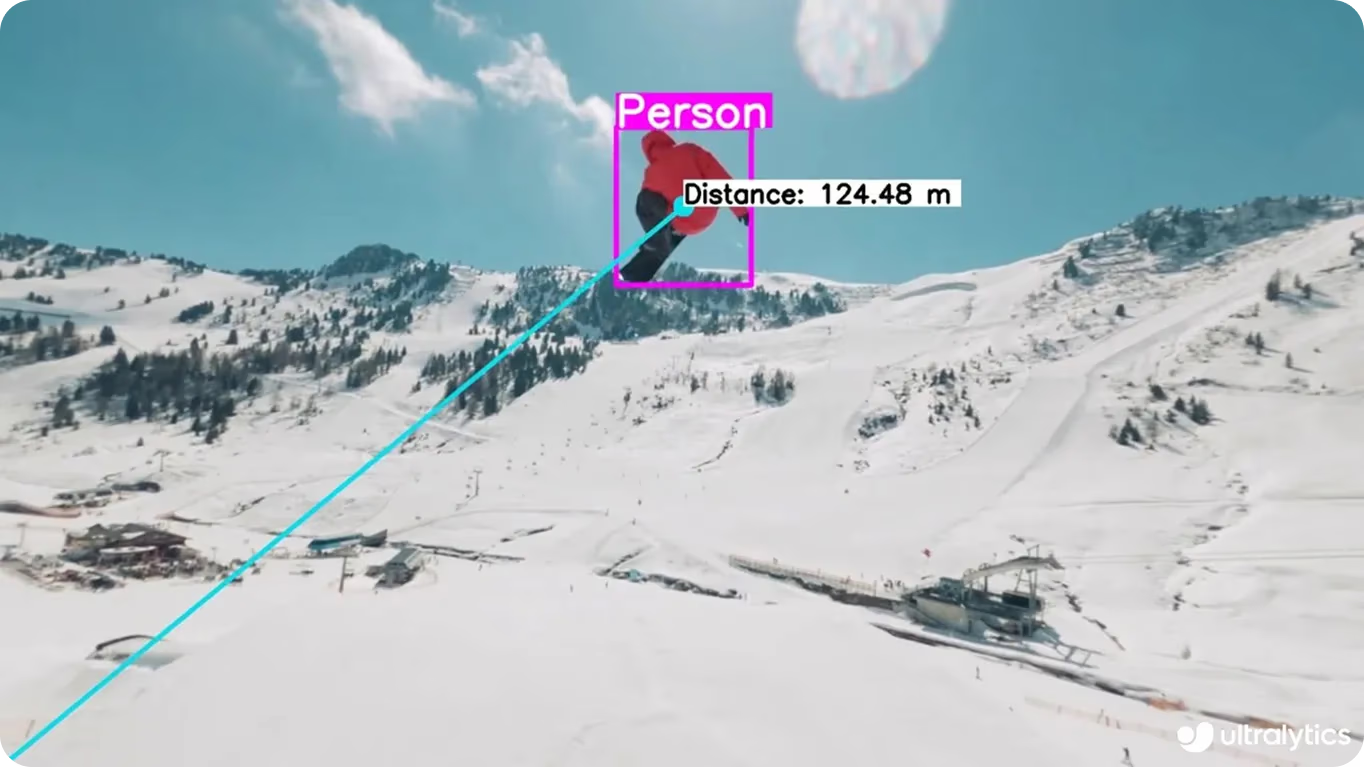
Şekil 3. Bir kişiyi tespit etmek ve mesafeleri hesaplamak için Ultralytics YOLO kullanımı.
Link to this sectionYOLO mesafe tahmininin etkisi#
YOLO11 kullanarak mesafe hesaplamanın bir tahmin olduğunu düşünürsek, şu soruyu sorabilirsin: Bu nerede kullanılabilir ve nasıl bir fark yaratabilir?
Bu mesafe tahminlerine ulaşmak için kalibrasyonlar kullanıldığından, bunlar birçok pratik durumda yardımcı olacak kadar doğrudurlar. YOLO11’in mesafe tahmini, nesnelerin sürekli hareket halinde olduğu ve işlerin sorunsuz yürümesi için gerçek zamanlı ayarlamaların gerekli olduğu depolar gibi dinamik ortamlarda özellikle yararlıdır.
İlginç bir örnek, bir taşıma bandındaki paketleri takip etmek ve aralarındaki mesafeyi gerçek zamanlı olarak tahmin etmek için YOLO11 kullanmaktır. Bu, depo yöneticilerinin paketlerin düzgün bir şekilde aralıklı olduğundan emin olmalarına, çarpışmaları önlemelerine ve işlerin sorunsuz yürümesini sağlamalarına yardımcı olur.
Bu gibi durumlarda tam bir mesafe her zaman gerekli değildir. Genellikle optimal mesafe için bir aralık veya eşik değeri belirlenir, bu nedenle bu tür uygulamalar için bir tahmin gayet iyi çalışır.
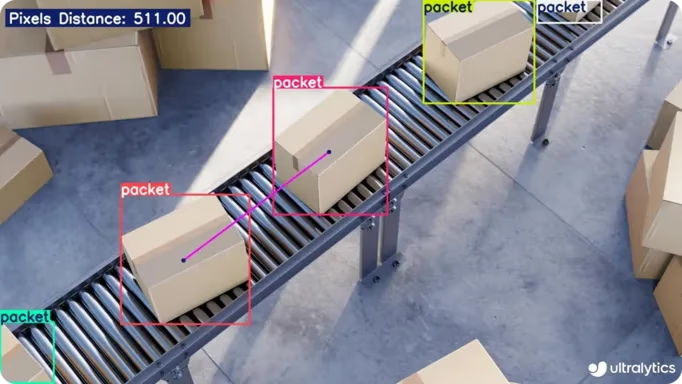
Şekil 4. YOLO11 kullanarak paketleri tespit etme ve aralarındaki mesafeyi hesaplama.
Link to this sectionBilgisayarlı görü uygulamalarında mesafe hesaplama#
Çeşitli bilgisayarlı görü uygulamaları, YOLO11 kullanarak nesneler arasındaki mesafeyi hesaplamaktan yararlanabilir. Örneğin, perakende analizinde, müşteri konumlarını gerçek zamanlı olarak takip ederek kuyruk yönetimine yardımcı olur. Bu, işletmelerin kaynakları daha iyi tahsis etmesini, bekleme sürelerini azaltmasını ve daha sorunsuz bir alışveriş deneyimi yaratmasını mümkün kılar. Personel seviyelerini dinamik olarak ayarlayarak ve müşteri akışını yöneterek mağazalar aşırı kalabalığı önleyebilir ve alan kullanımını optimize edebilir.
Benzer şekilde, trafik yönetiminde mesafe tahmini, araç aralıklarını izlemeye ve trafik düzenlerini analiz etmeye yardımcı olur. Bu, öndeki araca çok yakın gitmek (tailgating) gibi tehlikeli davranışları tespit etmek ve trafiğin sorunsuz akmasını sağlamak için trafik ışıklarını ayarlamak için kullanılabilir. Olası sorunları tespit ederek ve genel trafik yönetimini gerçek zamanlı olarak iyileştirerek yolların daha güvenli hale getirilmesine yardımcı olabilir.
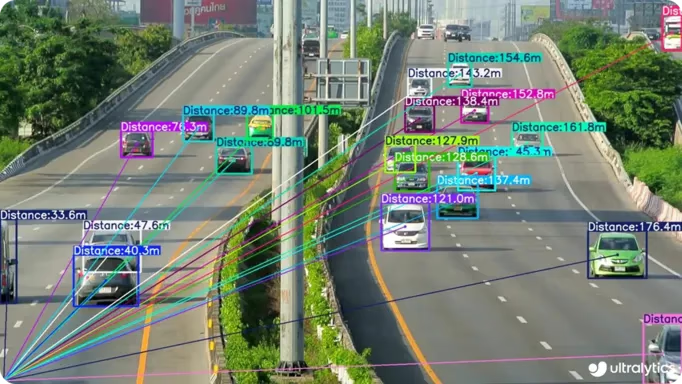
Şekil 5. Görüş destekli mesafe hesaplama trafiği izlemek için kullanılabilir.
Bu teknolojinin bir diğer benzersiz kullanımı, sosyal mesafeyi teşvik etmeye yardımcı olduğu COVID-19 pandemisi sırasında ortaya çıktı. İnsanların kamusal alanlarda, mağazalarda ve hastanelerde güvenli bir mesafeyi korumalarını sağlayarak virüsün yayılma riskini azalttı.
Mesafelerin gerçek zamanlı olarak takip edilmesiyle, bireyler birbirine çok yakın olduğunda uyarılar gönderilebilir, bu da işletmelerin ve sağlık hizmeti sağlayıcılarının hızlı yanıt vermesini ve herkes için daha güvenli bir ortam sağlamasını kolaylaştırırdı.
Link to this sectionBilgisayarlı görüde mesafe hesaplamanın artıları ve eksileri#
Bilgisayarlı görü kullanarak mesafe hesaplamanın bazı uygulamalarını ele aldığımıza göre, bunu yapmanın ilişkili faydalarına daha yakından bakalım:
- Otomasyon: Vision AI, aksi takdirde manuel takip gerektirecek mesafe hesaplama görevlerini otomatikleştirebilir; böylece insan hatasını ve işçilik maliyetlerini düşürürken verimliliği artırabilir.
- Kaynak optimizasyonu: Nesnelerin yaklaşık aralıkları ve yakınlıkları bilindiğinde, kaynaklar (personel veya makineler gibi) optimize edilebilir; bu da israfı azaltır ve iş akışlarını iyileştirir.
- Minimum kurulum karmaşıklığı: Bir kez kurulduğunda, görüş destekli mesafe hesaplama sistemlerinin bakımı nispeten kolaydır ve manuel giriş veya karmaşık makinelere dayanan diğer sistemlere kıyasla daha az insan müdahalesi gerektirir.
Bu avantajlara rağmen, bu tür sistemleri uygularken akılda tutulması gereken bazı sınırlamalar da vardır. İşte bilgisayarlı görü kullanarak mesafe hesaplama konusunda dikkate alınması gereken temel faktörlere hızlı bir bakış:
- Çevresel faktörlere duyarlılık: Mesafe hesaplamasının doğruluğu aydınlatma koşullarından, gölgelerden, yansımalardan veya engellerden etkilenebilir, bu da potansiyel hatalara veya tutarsızlıklara yol açabilir.
- Gizlilik endişeleri: Nesneleri veya insanları takip etmek için bilgisayarlı görü kullanmak, özellikle kişisel verilerin söz konusu olabileceği kamusal alanlarda veya hassas ortamlarda gizlilik sorunlarını gündeme getirebilir.
- Çoklu nesne senaryolarında karmaşıklık: Çok sayıda hareketli nesnenin bulunduğu ortamlarda, birden fazla nesne arasındaki mesafeyi aynı anda doğru bir şekilde hesaplamak, özellikle birbirlerine yakınlarsa veya kesişiyorlarsa kafa karışıklığına yol açabilir.
Link to this sectionÖne çıkanlar#
YOLO11 kullanarak nesneler arasındaki mesafeyi hesaplamak, karar verme süreçlerini destekleyebilecek güvenilir bir çözümdür. Nesne yakınlığını takip etmenin verimliliği ve güvenliği artırabileceği depolar, perakende ve trafik yönetimi gibi dinamik ortamlarda özellikle yararlıdır.
YOLO11, normalde manuel çaba gerektirecek görevleri otomatikleştirmeyi mümkün kılar. Çevresel faktörlere duyarlılık ve gizlilik endişeleri gibi bazı zorluklar olsa da, otomasyon, ölçeklenebilirlik ve kolay entegrasyon gibi faydaları onu etkili kılar. Bilgisayarlı görü, özellikle mesafe hesaplama gibi alanlarda gelişmeye devam ettikçe, makinelerin çevreleriyle nasıl etkileşime girdiğine ve çevrelerini nasıl anladığına dair gerçek bir değişim göreceğimiz muhtemeldir.
Topluluğumuza katıl! Vision AI hakkında daha fazla bilgi edinmek için GitHub depomuzu keşfet. Bilgisayarlı görüden yararlanmak istiyorsan, lisans seçeneklerimize göz at. Çözüm sayfalarımızı ziyaret ederek sağlık hizmetlerinde bilgisayarlı görünün verimliliği nasıl artırdığını öğren ve tarımda YZ kullanımının etkisini gör!






