Küçük nesnelerde model mAP değeri nasıl iyileştirilir: Hızlı bir kılavuz
Veri kalitesi, artırma, eğitim stratejileri, değerlendirme ve dağıtım konularında pratik ipuçlarıyla küçük nesneler üzerinde model mAP değerini nasıl artıracağını öğren.
Yapay zeka (AI), makine öğrenimi ve bilgisayarlı görü benimsenmesi artmaya devam ettikçe, nesne algılama sistemleri akıllı trafik kameralarından dronlara ve perakende analiz araçlarına kadar her yerde kullanılıyor. Genellikle bu sistemlerin, kameraya yakın büyük bir kamyondan uzaktaki küçücük bir yayaya kadar her boyuttaki nesneyi algılaması beklenir.
Tipik olarak, büyük ve net bir şekilde görünen nesneleri tespit etmek daha kolaydır. Buna karşılık, küçük nesneleri algılamak daha zordur.
Bir nesne görüntünün yalnızca küçük bir kısmını kapladığında, üzerinde çalışılacak çok az görsel bilgi kalır. Trafik akışındaki uzak bir yaya veya kuş bakışı yakalanan küçük bir araç yalnızca birkaç piksel içerebilir, ancak bu pikseller kritik bilgiler taşıyabilir.
Ultralytics YOLO modelleri gibi bilgisayarlı görü modelleri, nesneleri tanımak için görsel desenlere güvenir ve bu desenler sınırlı veya net değilse performans düşer. Önemli ayrıntılar işleme sırasında kaybolabilir ve bu da tahminleri lokalizasyon hatalarına karşı daha hassas hale getirir. Sınırlayıcı kutudaki (bounding box) hafif bir kayma bile doğru bir algılamayı kaçırılmış bir algılamaya dönüştürebilir.
Bu boşluk, model performansına baktığımızda netleşir. Çoğu algılama ve segmentasyon modeli orta ve büyük nesneleri iyi işler, ancak küçük nesneler genellikle genel doğruluğu düşürür.
Derin öğrenme performansı tipik olarak ortalama hassasiyet veya mAP kullanılarak ölçülür. Bu metrik, hem algılamaların ne kadar doğru olduğunu hem de tahmin edilen kutuların gerçek nesnelerle ne kadar iyi hizalandığını yansıtır.
Bu metrik, tahmin edilen nesnelerin kaçının doğru olduğunu gösteren hassasiyeti (precision) ve gerçek nesnelerin kaçının başarıyla algılandığını gösteren duyarlılığı (recall), farklı güven düzeyleri ve Intersection over Union veya IoU (tahmin edilen sınırlayıcı kutunun yer gerçeği kutusuyla ne kadar örtüştüğünü ölçen bir metrik) eşikleri genelinde birleştirir.
Daha önce küçük nesne algılama konusunu ve bunun bilgisayarlı görü modelleri için neden bu kadar zor bir sorun olduğunu incelemiştik. Bu makalede, bu temel üzerine inşa edeceğiz ve küçük nesneler söz konusu olduğunda mAP'in nasıl iyileştirileceğine odaklanacağız. Hadi başlayalım!
Link to this sectionKüçük nesneleri algılamak neden daha zordur?#
Nesne dedektörlerini içeren uygulamalar söz konusu olduğunda, küçük bir nesne, insan gözüne ne kadar küçük göründüğüyle değil, görüntünün ne kadarını kapladığıyla tanımlanır. Eğer görüntünün yalnızca çok küçük bir kısmını kaplıyorsa, çok az görsel bilgi içerir, bu da bir bilgisayarlı görü algoritmasının bunu doğru bir şekilde algılamasını zorlaştırır.
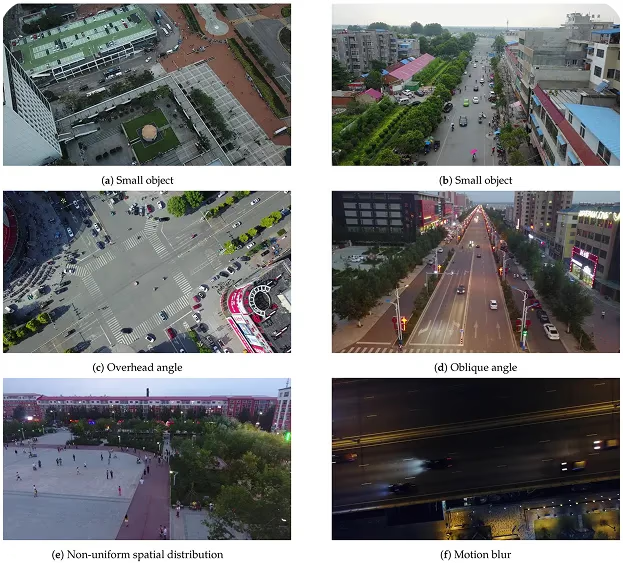
Şekil 1. Küçük nesnelerin sınırlı piksel alanlarını kapladığını gösteren örnek görüntüler (Kaynak)
Üzerinde çalışılacak daha az piksel olduğunda, kenarlar, şekiller ve dokular gibi önemli ayrıntılar belirsizleşebilir veya kolayca kaybolabilir. Görüntü model tarafından işlenirken, yararlı desenleri vurgulamak için yeniden boyutlandırılır ve basitleştirilir.
Bu, modelin genel sahneyi anlamasına yardımcı olsa da, ince ayrıntıları daha da azaltabilir. Küçük nesneler için bu ayrıntılar genellikle doğru algılama için gereklidir.
Bu zorluklar, değerlendirme metriklerine bakıldığında daha da belirginleşir. Küçük nesneler, lokalizasyon hatalarına karşı özellikle hassastır. Hafifçe yanlış hizalanmış bir sınırlayıcı kutu bile gerekli Intersection over Union veya IoU eşiğinin altına düşebilir.
Bu olduğunda, makul görünen bir tahmin yanlış olarak sayılabilir. Bu, hem hassasiyeti hem de duyarlılığı düşürür ve nihayetinde ortalama hassasiyeti veya mAP'i azaltır.
Bu faktörler yakından bağlantılı olduğundan, performansı iyileştirmek genellikle tüm sistemi düşünmeyi gerektirir. Bu, küçük görsel ayrıntıların daha iyi korunması ve yorumlanması için görüntü çözünürlüğünü, özellik çıkarımını, model tasarımını ve değerlendirme ayarlarını dikkatlice dengelemek anlamına gelir.
Link to this sectionVeri kümesi kalitesinin ve etiketlerin önemi#
Küçük nesne algılama söz konusu olduğunda, bir veri kümesinin kalitesi genellikle performansta en büyük farkı yaratır. Küçük nesneler bir görüntünün yalnızca küçük bir kısmını kaplar, bu da modelin öğrenmesi için mevcut çok az görsel bilgi olduğu anlamına gelir. Bu nedenle, eğitim verileri özellikle önem kazanır. Veri kümesi yeterince net ve temsil edici örnek içermiyorsa, nesne algılama modeli tutarlı desenleri tanımakta zorlanacaktır.
Küçük nesne algılama için iyi çalışan veri kümeleri genellikle yüksek çözünürlüklü görüntüler, küçük hedeflerin sık görünümü ve tutarlı görsel koşullar içerir. COCO veri kümesi gibi genel veri kümeleri yararlı başlangıç noktaları olsa da, genellikle belirli gerçek dünya kullanım durumlarının ölçeği, yoğunluğu veya bağlamıyla eşleşmezler. Bu gibi durumlarda, model performansını artırmak için alana özgü eğitim verileri toplamak gerekli hale gelir.
Etiket kalitesi de kritik bir rol oynar. Etiketler, modelin tahmin etmeyi öğrendiği doğru nesne etiketlerini ve sınırlayıcı kutu konumlarını belirterek yer gerçeğini (ground truth) oluşturur.
Küçük nesneler için sınırlayıcı kutular dikkatli ve tutarlı bir şekilde çizilmelidir. Küçük nesneler piksel düzeyindeki kaymalara karşı oldukça hassas olduğundan, kutu yerleşimindeki küçük farklar bile lokalizasyon doğruluğunu gözle görülür şekilde etkileyebilir.
Zayıf veya tutarsız etiketler mAP'i önemli ölçüde azaltabilir. Nesneler yanlış etiketlenirse, model yanlış desenleri öğrenir ve bu da yanlış pozitifleri (false positives) artırabilir.
Nesneler görüntüde görünüyorsa ancak yer gerçeğinde eksikse, doğru algılamalar değerlendirme sırasında yanlış pozitif olarak sayılabilir. Her iki durum da genel performansı düşürür.
İlginç bir şekilde, son araştırmalar küçük nesneler için ortalama hassasiyetin standart karşılaştırmalarda genellikle %20 ile %40 arasında kaldığını ve bunun büyük nesnelere göre önemli ölçüde daha düşük olduğunu göstermektedir. Bu boşluk, genel algılama doğruluğunda veri kümesi tasarımı ve etiket tutarlılığının önemini vurgulamaktadır.
Link to this sectionVeri artırma (augmentation), doğruluğu artırmada kilit bir rol oynayabilir#
Veri kümesi kalitesinin ve etiket tutarlılığının önemi daha iyi anlaşıldığına göre, bir nesne algılama modelinin mevcut verilerden nasıl daha etkili bir şekilde öğrenebileceğine bakalım. Ek görüntüler toplamak zor veya maliyetli olsa bile, halihazırda mevcut olan verilerden daha iyi yararlanarak performansı artırmanın yolları vardır.
En pratik yaklaşımlardan biri veri artırmadır. Küçük nesneler modelin öğrenmesi için daha az görsel ipucu sağladığından, küçük nesne algılamada özellikle önemli bir role sahiptir. Eğitim sırasında kontrollü varyasyonlar sunarak, artırma, yeni veri toplamaya gerek kalmadan modelin daha iyi genelleme yapmasına yardımcı olur.
Etkili veri artırma, küçük nesneleri net bir şekilde görünür tutmaya odaklanır. Kontrollü yeniden boyutlandırma, hafif kırpma ve görüntü döşeme gibi teknikler, küçük nesnelerin şeklini ve görünümünü korurken daha fazla öne çıkmalarını sağlayabilir. Amaç, modelin küçük nesneleri gerçek durumlardaki görünümlerini değiştirmeden daha sık ve biraz farklı koşullar altında görmesine yardımcı olmaktır.
Ancak, artırma dikkatli bir şekilde uygulanmalıdır. Bazı dönüşümler küçük nesnelerin görünürlüğünü azaltabilir veya gerçek verilerde oluşması muhtemel olmayan şekillerde görünümlerini değiştirebilir. Bu gerçekleştiğinde, model doğru nesne sınırlarını öğrenmekte zorlanabilir.
Link to this sectionÜretken yapay zeka ile daha akıllı veri artırma#
Giderek popülerleşen bir başka ilginç veri artırma türü, sentetik eğitim verileri oluşturmak için üretken yapay zekanın kullanılmasıdır. Manuel olarak toplanan ve etiketlenen görüntülere güvenmek yerine, ekipler artık belirli ortamları, nesne boyutlarını, aydınlatma koşullarını ve arka plan varyasyonlarını simüle eden gerçekçi sahneler oluşturabiliyor.
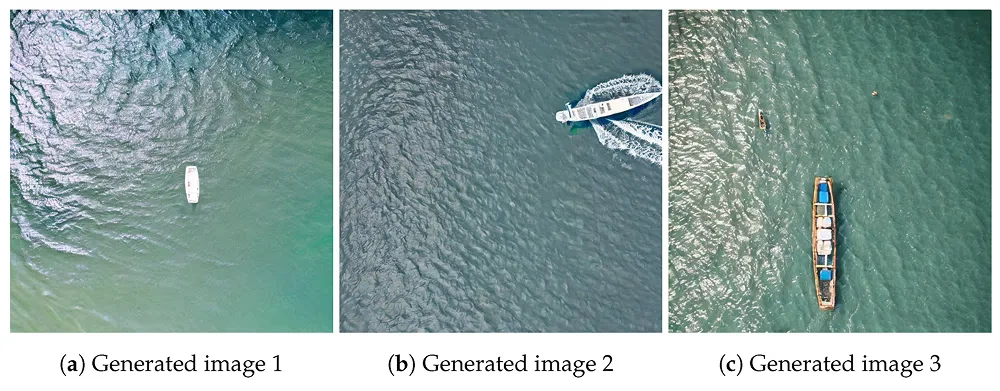
Şekil 2. Veri artırma için kullanılan sentetik hava görüntülerine bir bakış (Kaynak)
Bu yaklaşım, gerçek dünya örneklerinin tutarlı bir şekilde yakalanmasının zor olabileceği küçük nesne algılama için özellikle yararlıdır. Sentetik görüntülerde ölçek, yoğunluk ve yerleşim gibi küçük nesnelerin nasıl göründüğünü kontrol ederek, modelleri daha geniş bir eğitim senaryosu yelpazesine maruz bırakmak mümkündür.
Gerçek verilerle dikkatlice birleştirildiğinde, sentetik artırma model sağlamlığını artırabilir, veri toplama maliyetlerini azaltabilir ve daha hedefe yönelik performans iyileştirmelerini destekleyebilir.
Link to this sectionKüçük nesne mAP'ini etkileyebilecek model eğitim seçimleri#
Veri kümesi kalitesi ve etiket tutarlılığı dışında, model eğitim seçimleri de küçük nesne algılama performansı üzerinde güçlü bir etkiye sahiptir.
İşte dikkate alınması gereken temel eğitim stratejilerinden bazıları:
- Önceden eğitilmiş modellerle başlayın: Ultralytics YOLO26 gibi önceden eğitilmiş bir model, büyük görüntü veri kümelerinden genel görsel desenleri zaten öğrenmiştir. Bu, özellikle sınırlı verilerle küçük nesneleri algılarken, sıfırdan eğitim yerine güçlü bir başlangıç noktası sağlar.
- Transfer öğrenmeyi stratejik olarak kullanın: Transfer öğrenme, önceden eğitilmiş bir modeli belirli veri kümenize uyarlamak anlamına gelir. Modelin küçük nesnelerinize odaklanmasına yardımcı olurken aşırı öğrenmeyi (overfitting - genel desenleri öğrenmek yerine eğitim verilerini ezberlemek) azaltır.
- Sınıf dengesizliğini ele alın: Küçük nesneler büyüklerden daha az sıklıkla görünüyorsa, model daha büyük nesneleri öğrenmeye öncelik verebilir. Sınıf ağırlıklandırma veya örnekleme stratejileri gibi teknikler, küçük nesnelerin göz ardı edilmemesini sağlamaya yardımcı olur.
- Güven ve IoU eşiklerini ayarlayın: Küçük nesneler küçük lokalizasyon hatalarına karşı hassastır. Bu eşikleri ince ayarlamak, doğrulama ve çıkarım sırasında küçük nesne performansını daha iyi değerlendirmeye ve yorumlamaya yardımcı olur.
Link to this sectionKüçük nesne algılama için model mimarisi hususları#
Küçük nesne görevleri için genel bir nesne algılama modeli kullanabilseniz de, özellikle küçük nesne algılamayı iyileştirmek için tasarlanmış model mimarileri de vardır. Örneğin, ince mekansal ayrıntıları korumak için optimize edilmiş Ultralytics YOLOv8 modelinin P2 model varyantları mevcuttur.
YOLOv8, görüntüleri ağ içinde daha derine indikçe kademeli olarak küçülterek birden fazla ölçekte işler. Bu, modelin genel sahneyi anlamasına yardımcı olur, ancak ince ayrıntıları da azaltır.
Bir nesne zaten çok küçük olduğunda, önemli görsel bilgiler bu işlem sırasında kaybolabilir. Ultralytics YOLOv8'in P2 varyantı, özellik piramidinde 2'lik bir adım (stride) kullanarak bunu ele alır.
Bir özellik piramidi, modelin görüntüyü birden fazla dahili çözünürlükte analiz eden ve böylece farklı boyutlardaki nesneleri algılayabilmesini sağlayan kısmıdır. 2'lik bir adımla, görüntü bu aşamada daha kademeli olarak küçültülür ve orijinal piksel düzeyindeki ayrıntıların daha fazlasının korunmasına olanak tanır.
Daha fazla mekansal ayrıntı korunduğu için, küçük nesneler ağ içinde daha görünür bir yapı tutar. Bu, modelin yalnızca birkaç piksel kaplayan nesneleri lokalize etmesini ve algılamasını kolaylaştırır, bu da küçük nesne mAP'ini iyileştirmeye yardımcı olabilir.
Link to this sectionKüçük nesne algılama için boyut farkındalıklı değerlendirme#
Ortalama hassasiyet (mAP) genel model performansını özetlese de, bir modelin farklı boyutlardaki nesneleri ne kadar iyi işlediğini her zaman göstermez. Küçük nesneler için performans genellikle sınıflandırmadan ziyade lokalizasyon doğruluğu ile kısıtlanır; yani sınırlayıcı kutudaki hafif kaymalar sonuçları önemli ölçüde etkileyebilir.
Başka bir deyişle, model nesnenin sınıfını doğru bir şekilde tanımlayabilir, ancak tahmin edilen sınırlayıcı kutu biraz yanlış hizalanmışsa, algılama yine de yanlış kabul edilebilir. Küçük nesneler az sayıda pikseli kapladığından, kutu yerleşimindeki küçük bir kayma bile tahmin edilen kutu ile yer gerçeği arasındaki örtüşmeyi önemli ölçüde azaltabilir. Sonuç olarak, nesne doğru tanımlanmış olsa bile değerlendirme puanları düşebilir.
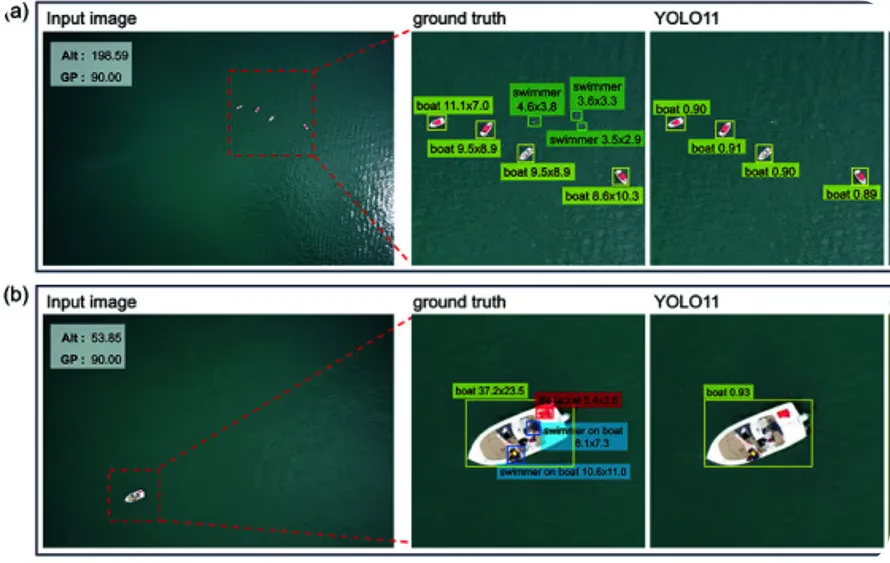
Şekil 3. Küçük nesne algılamayı değerlendirmek zor olabilir (Kaynak)
Daha bilgilendirici bir yaklaşım, performansı nesne boyutuna göre değerlendirmektir. Yaygın olarak kullanılan karşılaştırmaların çoğu, küçük, orta ve büyük nesneler için ortalama hassasiyeti ayrı ayrı rapor eder.
Bu boyuta özel döküm, modelin nerede iyi performans gösterdiğine ve nerede zorlandığına dair daha net bir görünüm sağlar. Uygulamada, küçük nesne AP'si genellikle genel mAP'in gerisinde kalır ve bu da toplu metriklerde belirgin olmayabilecek lokalizasyon zorluklarını vurgular.
Link to this sectionDağıtım kısıtlamalarını ve gerçek dünya ödünleşimlerini dikkate alın#
Model performansı, kontrollü test ortamlarından gerçek dünya dağıtımına geçildiğinde genellikle değişir. Görüntü çözünürlüğü, işleme hızı ve mevcut donanım gibi faktörler, küçük nesne algılamayı doğrudan etkileyen ödünleşimleri beraberinde getirir.
Örneğin, giriş çözünürlüğünü artırmak küçük nesne mAP'ini iyileştirebilir çünkü küçük hedefler daha fazla piksel kaplar ve daha fazla ayrıntıyı korur. Ancak, daha yüksek çözünürlük aynı zamanda bellek kullanımını ve işlem süresini de artırır. Bu, çıkarımı yavaşlatabilir ve operasyonel maliyetleri yükseltebilir.
Şekil 4. Küçük nesne algılama dağıtım zorlukları. Görsel yazar tarafından hazırlanmıştır.
Donanım seçimleri, bu ödünleşimleri yönetmede kilit bir rol oynar. Daha güçlü GPU'lar daha büyük modellere ve daha hızlı işlemeye olanak tanır, ancak dağıtım ortamları, özellikle uç cihazlar, genellikle sınırlı bilgi işlem ve bellek kaynaklarına sahiptir.
Gerçek zamanlı uygulamalar başka bir kısıtlama daha ekler: düşük gecikmeyi korumak, model boyutunun veya giriş çözünürlüğünün azaltılmasını gerektirebilir ve bu da küçük nesne duyarlılığını (recall) olumsuz etkileyebilir. Nihayetinde, dağıtım kararları algılama performansını donanım sınırlamaları, hız gereksinimleri ve genel maliyetle dengelemeyi gerektirir.
Link to this sectionHepsini bir araya getirmek: Küçük nesnelerde model mAP'ini iyileştirme#
Küçük nesne algılamayı iyileştirmek, özellikle gerçek dünya ortamlarında çalışırken pratik ve yapılandırılmış bir yaklaşım gerektirir. İşte aklınızda bulundurmanız gereken temel adımlara genel bir bakış:
- Veri kümesi kalitenizi denetleyin: Veri kümenizin yeterince küçük nesne örneği içerdiğinden, mümkün olduğunda yüksek çözünürlüklü görüntüler kullandığından ve modelin dağıtılacağı koşulları yansıttığından emin olun.
- Etiket tutarlılığını doğrulayın: Sınırlayıcı kutuların doğru, eksiksiz ve tutarlı bir şekilde etiketlendiğinden emin olun. Tutarsız etiketler doğrudan lokalizasyon performansını sınırlayabilir.
- Eğitim ayarlarını bilinçli olarak yapın: Küçük nesnelerin eğitim sırasında doğru bir şekilde temsil edilmesi için toplu iş boyutunu (batch size), dönem (epoch) sayısını ve optimizasyon ayarlarını düşünceli bir şekilde ayarlayın.
- Adım adım ilerleyin: Kontrollü ayarlamalar yapın, etkilerini ölçün ve yaklaşımınızı geliştirin. İstikrarlı, veri odaklı yineleme zaman içinde tutarlı iyileşme sağlar.
Link to this sectionÖne çıkanlar#
Küçük nesneler için mAP'i iyileştirmek, rastgele değişiklikler yerine yapılandırılmış, veri odaklı bir yaklaşım gerektirir. Gerçek iyileştirmeler; iyi verileri, tutarlı etiketleri, dikkatli eğitimi ve doğru değerlendirme yöntemlerini birleştirmekten gelir. Gerçek dünya projelerinde, istikrarlı testler ve küçük, ölçülebilir değişiklikler, zaman içinde daha iyi ve daha güvenilir küçük nesne algılamasına yol açan şeylerdir.
Büyüyen topluluğumuza katıl ve uygulamalı yapay zeka kaynakları için GitHub depomuzu keşfet. Bugün vision AI ile inşa etmeye başlamak için lisans seçeneklerimize göz at. Tarımda yapay zekanın tarımı nasıl dönüştürdüğünü ve robotikte vision AI alanındaki yeniliklerin geleceği nasıl şekillendirdiğini öğrenmek için çözüm sayfalarımızı ziyaret et.






