Ultralytics YOLO modelleri ile çarpışma tahminini iyileştirme
Ultralytics YOLO modellerinden elde edilen içgörülerin, çarpışma tahmin sistemlerinin dinamik ortamlarda daha güvenli ve hızlı kararlar almasına nasıl yardımcı olduğunu öğren.
Yolda ne kadar dikkatli olursan ol, kazalar yine de yaşanabilir. Bir araba şerit değiştirir, bir yaya aniden yola atlar veya bir bisikletli hiç uyarı vermeden hızlanır. Bu günlük anlar, çarpışma tahmin sistemlerinin gerçek bir fark yaratabileceği ve herkesi güvende tutmaya yardımcı olabileceği durumların örnekleridir.
Daha önce top yörünge tahmini konusuna bakmış ve hızlı hareket eden bir topun yolunu tahmin etmenin, spor analitiğinin hareketi anlamasına ve bir sonraki adımda ne olacağını öngörmesine nasıl yardımcı olduğunu görmüştük. Çarpışma tahmini de benzer bir şekilde çalışır.
Bu tahmin sistemleri aslında geleceğe bakar. Araçların ve yayaların nasıl hareket ettiğini izleyerek, riskleri erkenden yakalayabilir ve işler tehlikeli bir hal almadan önce (hareket planlama veya yol planlama olarak da bilinir) yollarını veya davranışlarını düzeltebilirler.
Çarpışma tahmin sistemlerinin arkasındaki temel bilgisayar bilimi teknolojileri, yapay zeka ve onun bilgisayarlı görü ve nesnelerin nasıl hareket edeceğini tahmin etmeye yardımcı olan tahmin yöntemleri gibi alt alanlarıdır. Örneğin, Ultralytics YOLO11 ve yakında çıkacak olan Ultralytics YOLO26 gibi bilgisayarlı görü modelleri, araçlar ve yayalar gibi nesneleri gerçek zamanlı olarak tespit etmek ve izlemek için kullanılabilir; tahmin modelleri ise bu içgörüleri kullanarak bir sonraki hareketlerini kestirir.
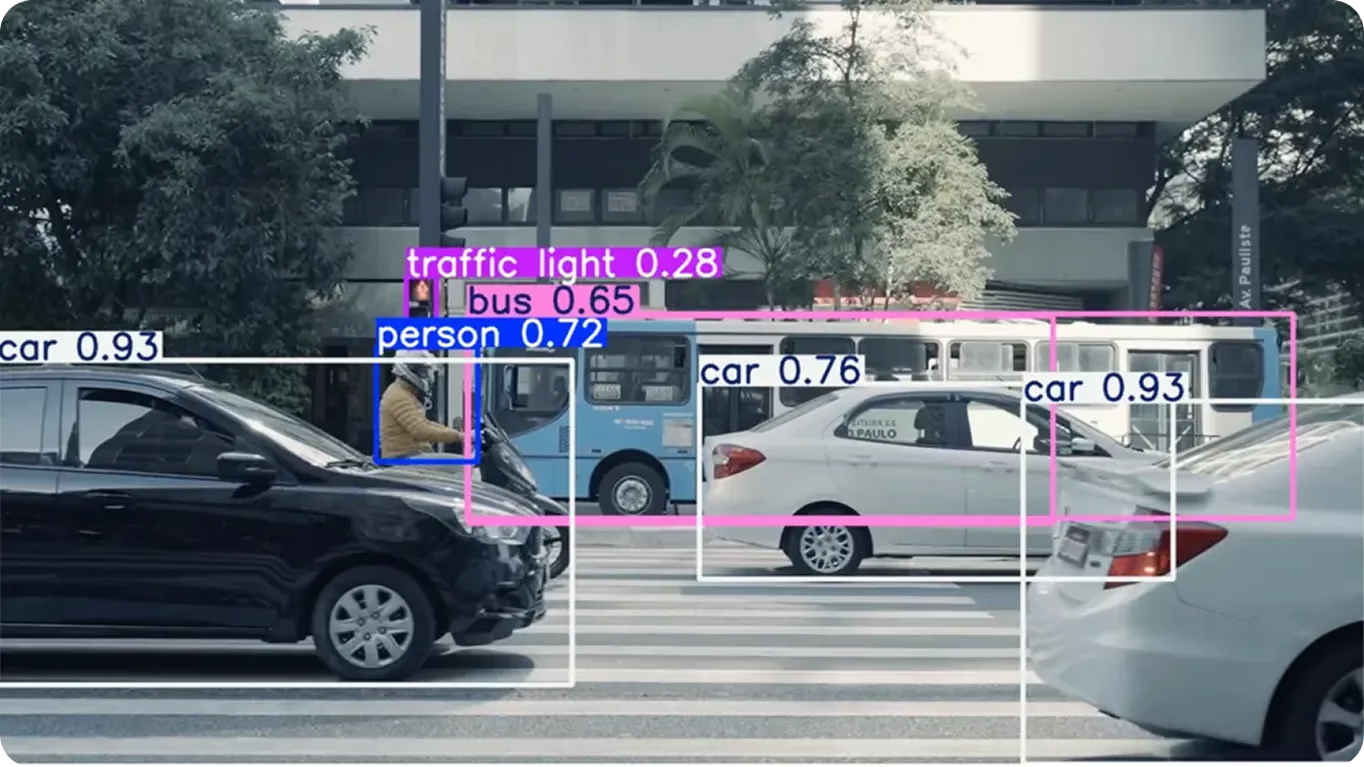
Şekil 1. YOLO11'in yoldaki nesneleri tespit etmek için kullanıldığı bir örnek (Kaynak).
Sonuç, çevresinde neler olup bittiğini anlayan ve dinamik ortamlarda daha akıllı karar vermeyi destekleyen bir yapay zeka sistemidir. Bu makalede, çarpışma tahmininin nasıl çalıştığını, arkasındaki yöntemleri ve bilgisayarlı görü ile Ultralytics YOLO modellerinin bu süreçte oynayabileceği rolü keşfedeceğiz. Haydi başlayalım!
Link to this sectionÇarpışma tahmini nedir?#
Çarpışma tahmini, bir yapay zeka sisteminin nesnelerin nasıl hareket ettiğini anlama ve ne zaman birbirlerine çok yaklaşacaklarını veya temas edeceklerini öngörme yeteneğidir. Farklı sistemler bu bilgiyi güvenlik özelliklerini desteklemek, hareket optimizasyonu sağlamak veya paylaşılan alanlardaki eylemleri koordine etmek dahil olmak üzere birçok şekilde kullanabilir.
Nesnelerin paylaşılan bir alanda hareket ettiği her yerde; ister otoyoldaki arabalar, ister depo koridorlarındaki forkliftler, isterse caddeden karşıya geçen yayalar olsun, çarpışma tahmini sistemlerin bu etkileşimlerin nasıl gelişebileceğini anlamalarına yardımcı olur. Güvenlik odaklı uygulamalarda bu öngörü riski azaltmak için kullanılırken, diğer ortamlarda rota planlama, zamanlama veya koordineli hareket gibi görevleri destekleyebilir.
Örneğin, gelişmiş sürücü destek sistemleri veya ADAS ile donatılmış birçok yeni araçta kameralar ve sensörler ilerideki yolu izler ve arabanın yakındaki nesnelere ne kadar hızlı yaklaştığını tahmin eder. Sistem, bir durumun güvensiz hale gelebileceğini tespit ederse sürücüyü uyarır ve bazı durumlarda otomatik frenleme çarpma etkisini azaltmaya yardımcı olabilir.
Link to this sectionÇarpışma tahmininin dört aşamasını keşfetme#
Çarpışma tahmini, farklı yapay zeka bileşenlerinin nesneleri tanımlamak, hareketlerini takip etmek ve bir sonraki aşamada ne olabileceğini tahmin etmek için birlikte çalıştığı koordineli bir süreci içerir. Bu sistemler genellikle dört bağlantılı aşamadan geçer: nesne tespiti, nesne takibi, yörünge tahmini ve son olarak çarpışma tahmini; her aşama bir öncekinin doğruluğu üzerine inşa edilir.
Şimdi, her bir aşamanın nasıl çalıştığına daha yakından bakalım.
Link to this sectionNesne tespitine bir bakış#
Nesne tespiti, görü yapay zeka modellerinin bir görüntü veya video karesindeki nesneleri tanımladığı ve konumlandırdığı temel bir bilgisayarlı görü görevidir. Piksel verilerini analiz ederek, bir nesne tespit modeli üç ana çıktı üretebilir: sınırlayıcı kutular (bounding box), nesne sınıfları ve güven puanları. Sınırlayıcı kutular bir nesnenin nerede olduğunu gösterir, nesne sınıfları onun araba, yaya veya bisikletli gibi ne olduğunu belirtir ve güven puanları modelin tahminden ne kadar emin olduğunu yansıtır.
YOLO11 ve YOLO26 gibi görü yapay zeka modelleri bu temel üzerine inşa edilmiştir ve nesne tespiti, nesne takibi ve yönelimli sınırlayıcı kutu (OBB) tespiti dahil olmak üzere çeşitli ilgili görevleri destekler. Nesne tespiti bir tahmin sistemine her karede ne olduğunu söyleyebilir, takip nesneleri hareket ettikçe izler ve yönelimli sınırlayıcı kutular farklı açılarda görünen nesneler için daha doğru şekiller sağlar.
Bu aşamada, bir çarpışma tahmin sistemi tamamen görsel veride neyin mevcut olduğunu anlamaya odaklanır. Tüm sonraki adımların bağlı olduğu bilgi temel katmanını oluşturur, ancak nesnelerin nasıl hareket edeceğini veya etkileşime gireceğini henüz dikkate almaz.
Link to this sectionNesne takibine genel bir bakış#
Nesneler tespit edildikten sonra bir sonraki adım, sistemi zaman içinde nasıl hareket ettiklerini anlayabilmesi için onları kareler boyunca takip etmektir. Tespit her karede yeni sınırlayıcı kutular sağlarken, nesne takibi bu tespitleri zaman içinde birbirine bağlayarak süreklilik katar.
Ultralytics Python paketi tarafından desteklenen ByteTrack veya BoT-SORT gibi takip algoritmaları, nesneler hareket ederken onları takip etmek için her kareden gelen tespit verilerini kullanarak YOLO11 gibi modellerle birlikte çalışır. Bu algoritmalar her nesneye benzersiz bir kimlik (ID) atar ve nesne hızla hareket ettiğinde veya kısmen gizlendiğinde bile bu kimliği korumak için bunu kullanır. Bu, nesnenin nasıl hareket ettiğini yakalayan pürüzsüz bir takip geçmişi oluşturur.

Şekil 2. YOLO kullanarak farklı tespitler için benzersiz kimlikler atamaya bir bakış (Kaynak)
İşte bu iki takip yönteminin nasıl çalıştığına dair hızlı bir bakış:
- ByteTrack: Tutarlı nesne kimliklerini korumak için hem yüksek hem de düşük güvenli tespitleri kullanır; bir Kalman Filtresinden gelen hareket tahminleri, nesneler hızla hareket ettiğinde veya kısa süreliğine tespit edilmesi zorlaştığında takipçinin sabit kalmasına yardımcı olur.
- BoT-SORT: Bu algoritma, Kalman Filtresi hareket tahminlerini görünüm ipuçlarıyla birleştirerek SORT'u genişletir ve takipçinin kalabalık sahnelerde veya kısmi tıkanma sırasında nesneleri daha güvenilir bir şekilde izlemesine olanak tanır.
Bu takip yöntemlerinin ne kadar iyi performans gösterdiğini ölçmek için araştırmacılar bunları yerleşik çoklu nesne takibi (MOT) veri kümeleri ve karşılaştırmalı testler üzerinde değerlendirir. Ayrıca, genel takip kalitesini yansıtan çoklu nesne takibi doğruluğu (MOTA); nesne kimliklerinin ne kadar tutarlı korunduğunu ölçen tanımlama F1 puanı (IDF1); ve hem tespit performansı hem de ilişkilendirme doğruluğunun dengeli bir görünümünü sunan daha yüksek dereceli takip doğruluğu (HOTA) gibi metrikler yaygın olarak kullanılır.
Link to this sectionYörünge tahminini anlama#
Bir nesneyi birden fazla kare boyunca takip ettikten sonraki adım, bir sonraki aşamada nereye gideceğini tahmin etmektir. Buna yörünge tahmini denir. Tespit nesneleri bulur ve takip hareketlerini izlerken, tahmin ileriye bakar ve gelecekteki konumlarını kestirir.
Tespit ve takipten gelen, nesnenin sınırlayıcı kutusu, kareler arasındaki konumu ve atanan kimlik gibi bilgiler, hız, yön ve hareket kalıpları gibi hareket özelliklerini hesaplamak için kullanılabilir. Bu türetilmiş içgörüler, tahmin modeline nesnenin önümüzdeki birkaç saniye içinde nerede olabileceğini kestirmesi için ihtiyaç duyduğu veriyi sağlar.
Takip verilerinin boşluklar veya ani sıçramalar içerdiği durumlarda, enterpolasyon teknikleri daha pürüzsüz ve tutarlı yörüngeler oluşturmaya yardımcı olur. Bu, tahmin modelinin gürültülü veya eksik konum verileri yerine yüksek kaliteli hareket girdisi almasını sağlar.
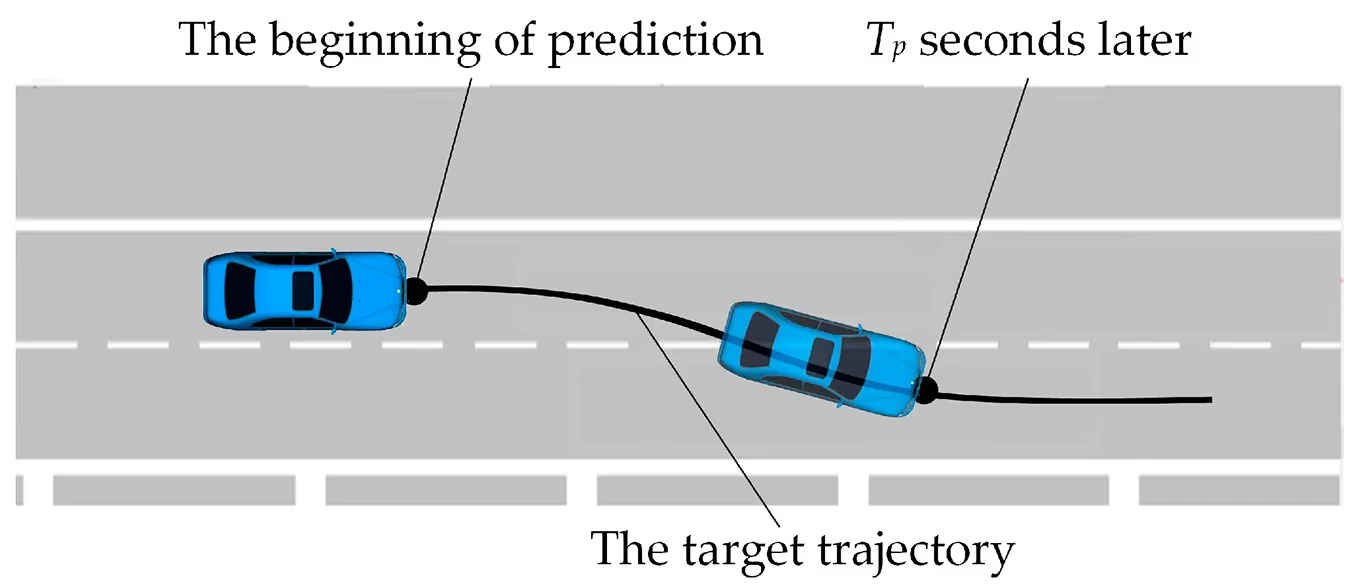
Şekil 3. Bir arabanın yörüngesini tahmin etmenin görselleştirmesi. (Kaynak)
Bu tahminleri yapmak için birçok sistem, bir nesnenin hareketinin zaman içinde nasıl değiştiğini anlamak üzere tasarlanmış derin öğrenme modellerine güvenir. Geçmiş konum dizilerini ve bunlardan türetilen hareket özelliklerini analiz ederek, bu modeller yaygın hareket kalıplarını öğrenir ve bu bilgiyi gelecekteki yolları tahmin etmek için kullanır.
İşte yörünge tahmini için yaygın olarak kullanılan bazı derin öğrenme ve makine öğrenimi yaklaşımları:
-
Yinelemeli Sinir Ağları (RNN'ler): RNN'ler, video kareleri dizisi gibi dizilerle çalışmak üzere tasarlanmış derin öğrenme modelleridir. Önceki konumların bir hafızasını tutabilir ve bu bilgiyi bir nesnenin nasıl hareket ettiğini anlamak için kullanabilirler. Bu, sistemin hızlanma, yavaşlama veya düz bir çizgide ilerleme gibi basit hareket kalıplarını tanımasına yardımcı olur.
-
Uzun Kısa Süreli Bellek Ağları (LSTM'ler): LSTM'ler, bilgileri daha uzun süre hatırlayabilen daha gelişmiş bir RNN türüdür. Bu, aracın dönüşe hazırlanması veya bir yayanın yön değiştirmesi gibi daha karmaşık hareketleri yakalamalarını sağlar. Daha uzun eğilimleri izleyebildikleri için, yoğun ortamlarda genellikle daha güvenilir tahminler üretirler.
-
Transformerlar: Transformerlar tam hareket dizilerini işler ve bu dizilerin en önemli ayrıntılarına odaklanmak için dikkat (attention) mekanizmasını kullanır. Bu, onları birleşen arabalar veya karşıdan karşıya geçen yayalar gibi birden fazla nesnenin etkileşime girdiği sahnelerde özellikle etkili kılar.
Bu modeller hem kısa vadeli hem de uzun vadeli yolları tahmin edebilir. Genellikle iki saniyenin altındaki kısa vadeli tahminler en doğru olma eğilimindeyken, iki ila altı saniye gibi daha uzun pencerelerdeki tahminler daha fazla öngörü sağlar ancak daha büyük belirsizliklerle birlikte gelir.
Link to this sectionHepsini bir araya getirme: Çarpışma tespit algoritmaları#
Son aşama olan çarpışma tahmininde sistem, şimdiye kadar öğrendiği her şeyi kullanır: her nesnenin ne olduğu (tespit), nasıl hareket ettiği (takip) ve bir sonraki adımda nereye gidebileceği (tahmin). Bu adım, tahmin edilen yollardan herhangi birinin bir çarpışmaya yol açabilecek şekilde kesişip kesişmediğini kontrol eder.
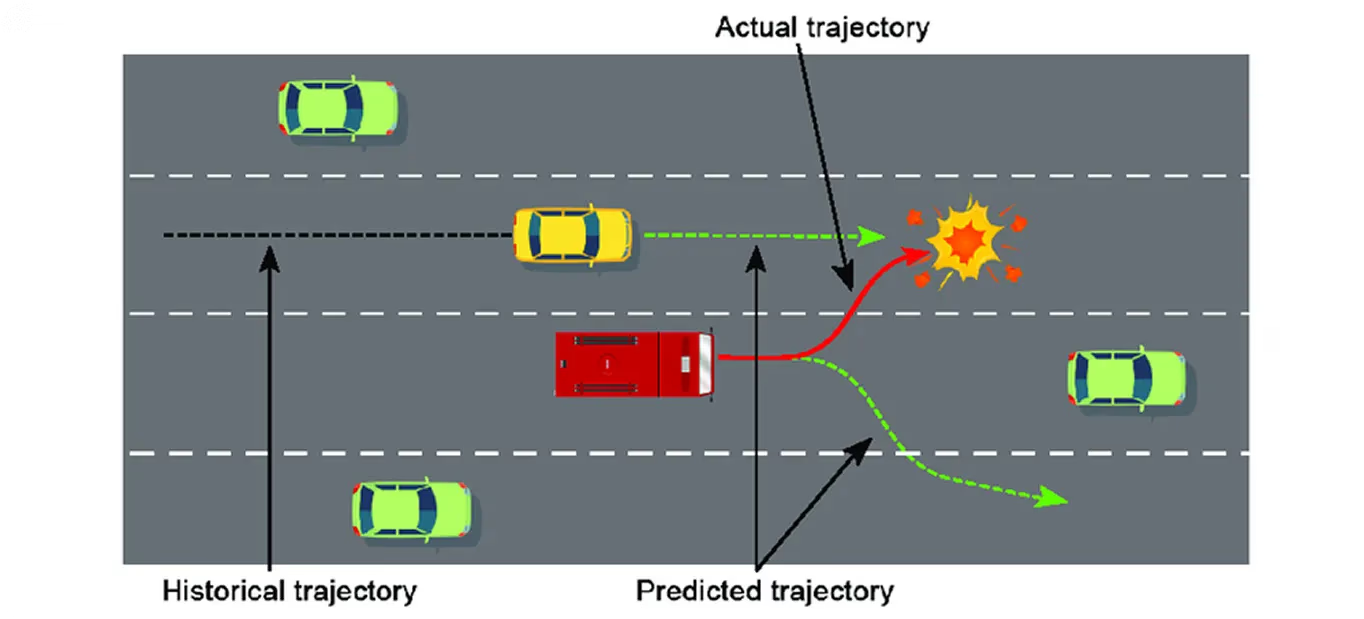
Şekil 4. Bir çarpışma tahmin sistemi nasıl çalışır (Kaynak)
Otonom araçlar söz konusu olduğunda, bir çarpışma kontrol sistemi arabalar, yayalar ve bisikletliler gibi yakındaki nesnelerin gelecekteki yörüngelerini karşılaştırır. Eğer iki tahmin edilen yol çakışırsa veya tehlikeli bir şekilde yakınlaşırsa, durumu potansiyel bir araç çarpışması olarak işaretler. Çarpışma riskinin ne kadar acil olduğunu anlamak için sistem, çarpışma süresi (time-to-collision) olarak bilinen bir değer de hesaplar.
Çarpışma süresi (TTC), hızlı hareket eden ortamlarda önemli bir ölçümdür. İki nesnenin mevcut hızlarında ve yönlerinde devam etmeleri halinde çarpışmalarına ne kadar süre kaldığını kestirir. TTC belirli bir eşiğin altına düştüğünde sistem uyarılar vererek, fren yaparak veya planlanan yolunu ayarlayarak tepki verebilir.
Link to this sectionÇarpışma tahmininin gerçek dünya uygulamaları#
Çarpışma tahmini; trafik yönetimi, akıllı şehir altyapısı, endüstriyel otomasyon ve mobil robotik dahil olmak üzere birçok sektörde çok önemli hale geliyor. En gelişmiş bilgisayarlı görü ve tahmin modelleri ilerlemeye devam ettikçe, bu sistemler hareketi öngörme konusunda daha yetenekli hale geliyor.
Çarpışma tahmini ve yörünge tahmininin nasıl çalıştığına dair daha iyi bir anlayışa sahip olduğumuza göre, bu yöntemlerin çeşitli gerçek dünya ortamlarında nasıl kullanılabileceğini gösteren bazı ilginç araştırma çalışmalarına bakalım.
Link to this sectionAcil durum otonom araçları için YOLO destekli çarpışma tahmini#
Kalabalık ve öngörülemez ortamlarda gezinmek, özellikle yayalar net kalıpları izlemeyen yollarla hareket ettiğinde, otonom sistemler için en zorlu sınavlardan biridir. Acil durum araçları, yapılandırılmış yollara, şerit işaretlerine veya tahmin edilebilir yaya davranışlarına güvenmeden yoğun kamusal alanlarda yüksek hızlarda hızlı hareket etmeleri gerektiğinden bu sorunla daha sık karşılaşır.
Bu tür senaryolarda, insanların nerede olduğunu ve önümüzdeki birkaç saniye içinde nasıl hareket edebileceklerini anlamak, kazaları önlemek için çok önemlidir. Örneğin, yakın tarihli bir araştırma çalışması, yaya açısından zengin ortamlarda faaliyet gösteren bir Acil Durum Otonom Aracı (EAV) için eksiksiz bir çarpışma tahmin hattı oluşturarak bu zorluğu araştırmıştır.
Link to this sectionYOLO destekli çarpışma tahmin hattı nasıl çalışır?#
İşte bu metodolojinin nasıl çalıştığına dair bir bakış:
- YOLO kullanarak yaya tespiti: YOLO tabanlı bir dedektör, her kamera karesindeki yayaları tanımlar ve görünen her kişi için sınırlayıcı kutular çıkarır.
- ByteTrack ile hareket takibi: ByteTrack algoritması, bu tespitleri kareler boyunca birbirine bağlayarak her yayaya tutarlı bir kimlik verir ve zaman içinde nasıl hareket ettiklerini gösteren bir hareket geçmişi oluşturur.
- Gerçek dünya konum kestirimi: Ters Perspektif Haritalama (IPM), 2D piksel koordinatlarını yaklaşık zemin düzlemi konumlarına dönüştürerek sistemin yayaların gerçek dünyada araca göre nerede olduğunu anlamasına yardımcı olur.
- cGAN kullanarak kuş bakışı görünüm oluşturma: Bir görüntü formatını diğerine dönüştüren bir yapay zeka modeli olan koşullu GAN, sahnenin kuş bakışı bir temsilini oluşturur. Bu üstten görünüm düzeni, yaya konumlarını ve çevrelerini yorumlamayı kolaylaştırır.
- LSTM modeli ile yörünge tahmini: Her yayanın geçmiş konumlarını ve hareket kalıplarını kullanan bir LSTM modeli, önümüzdeki birkaç saniye içinde nereye hareket edebileceklerini tahmin eder.
- Çarpışma konileri kullanarak verimli çarpışma tespiti: Tahmin edilen yörüngeler, aracın ve herhangi bir yayanın yollarının kesişmek üzere olup olmadığını belirleyen çarpışma konisi yöntemi kullanılarak karşılaştırılır.
- Sinyalizasyon yoluyla çarpışmayı önleme: Sistem bir çarpışma tahmin ederse, en uygun anda bir işitsel sinyali (korna veya zil gibi) etkinleştirir. Zamanlama, yaya davranışını etkilemek ve onlara hızlanma veya yavaşlama ve güvenli bir yere geçme şansı vermek için seçilir.
Link to this sectionUç görü ve YOLO kullanarak şehirlerde yaya güvenliğini sağlama#
Benzer şekilde, çarpışmayı önlemeye yönelik bir başka yaklaşım araçların ötesine bakar ve altyapının kendisine odaklanır. Bu yöntem, bir arabanın içindeki sensörlere güvenmek yerine, yayaların ve araçların nasıl hareket ettiğini gerçek zamanlı olarak izlemek için yaya geçitlerine ve kavşaklara kurulan akıllı kameraları kullanır. Bu konumlar genellikle öngörülemezdir; insanlar aniden yola adım atabilir, bisikletliler trafiğin arasından geçebilir ve sürücüler her zaman yavaşlamayabilir, bu nedenle riskleri erken tespit etmek hayati önem taşır.
İlginç bir çalışma, araç-yaya risklerini doğrudan kavşakta tahmin etmek için tasarlanmış bir uç görü cihazı olan NAVIBox adlı bir sistem aracılığıyla bu fikri araştırmıştır. Sistem, yayaları ve araçları tespit etmek için Ultralytics YOLOv8 modelini ve onları kareler boyunca izlemek için hafif bir Sentroid takipçisini kullanır. Bu, açılı CCTV görüntüsünü yolun daha net bir kuş bakışı düzenine dönüştüren bir perspektif dönüşümü kullanılarak iyileştirilen kısa, güvenilir hareket geçmişleri oluşturur.
Bu iyileştirilmiş yörüngelerle NAVIBox, yol kullanıcılarının önümüzdeki birkaç saniye içinde nasıl hareket edebileceklerini kestirebilir ve yollarının kesişip kesişmediğini (kavşak testi olarak da adlandırılır) kontrol edebilir. Sistem riskli bir etkileşim tespit ettiğinde, uzak bir sunucuya veya ağ bağlantısına ihtiyaç duymadan sürücüler için ekranlar ve yayalar için hoparlörler aracılığıyla anında uyarı gönderir. Gerçek kentsel konumlardaki testler, NAVIBox'ın gerçek zamanlı yanıt için yeterince hızlı çalıştığını ve potansiyel çarpışma senaryolarını doğru bir şekilde tanımlayabildiğini gösterdi, bu da onu yoğun şehir kavşakları için pratik bir güvenlik aracı haline getiriyor.
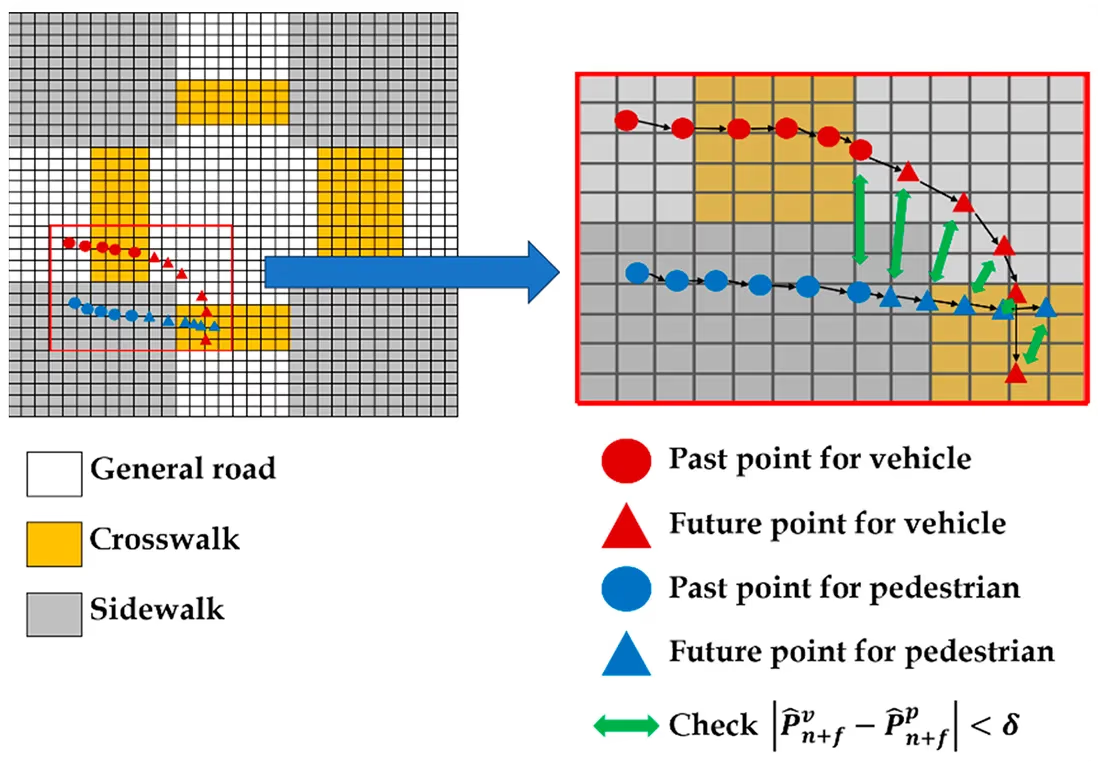
Şekil 5. Araçlar ve yayalar arasındaki çarpışma riskini tahmin etme. (Kaynak)
Link to this sectionÇarpışma tespit ve tahmininin avantajları ve dezavantajları#
İşte yapay zeka destekli öngörücü çarpışma sistemlerini kullanmanın bazı avantajları:
-
Durumsal farkındalığı artırır: Yapay zeka sistemleri, nesnelerin bir ortamda nasıl hareket ettiğini sürekli olarak haritalandırarak büyük ölçekli kalabalık akışı, trafik davranışı veya makine yolları hakkında daha zengin bir anlayış sağlar.
-
Uzun vadeli planlama için veriye dayalı içgörüler: Tespitleri, ramak kala olayları ve hareket kalıplarını günlüğe kaydederek, yapay zeka sistemleri şehir planlamacıların, güvenlik ekiplerinin ve filo operatörlerinin kavşakları yeniden tasarlamak, işaretleri iyileştirmek veya operasyonel politikaları iyileştirmek için kullanabileceği analitik veriler sağlar.
-
Maliyet etkin risk önleme: Riskleri büyümeden önce tespit ederek, bu sistemler maliyetli kazaları, sigorta taleplerini veya ekipman onarımlarını önlemeyi mümkün kılar.
Faydalarına rağmen, çarpışmasız sistemler de bazı sınırlamalarla karşı karşıyadır. İşte dikkate alınması gereken birkaç zorluk:
- Sensör ve kamera yerleştirme kısıtlamaları: Kötü yerleştirilmiş veya açılı kameralar nesne boyutunu veya mesafesini bozabilir, bu da derinlik kestirimini ve yörünge tahminini daha az güvenilir hale getirir.
- Tıkanma: Nesneler diğerlerinin arkasında kısmen veya tamamen gizlenebilir. Model görsel sürekliliği kaybettiğinden bu, nesne takibini zorlaştırır.
- Çevresel koşullar: Düşük ışık, sert güneş ışığı, yağmur, sis veya düşük kamera kalitesi, modelin sahneyi net bir şekilde görme yeteneğini azaltarak doğruluğu etkileyebilir.
Link to this sectionÖne çıkanlar#
Çarpışma tahmini iki güçlü yeteneği bir araya getirir: sistemlerin ortamda şu anda neler olduğunu anlamasını sağlayan bilgisayarlı görü ve bir sonraki adımda ne olacağını kestirmelerine yardımcı olan yörünge tahmini.
Bu güçleri birleştirerek, makineler hareketli nesneleri gerçek zamanlı olarak tespit edebilir ve bu nesnelerin önümüzdeki saniyelerde nasıl etkileşime girebileceğini tahmin edebilir. Bilgisayarlı görü ve tahmin teknikleri gelişmeye devam ettikçe, çarpışma tahmini daha güvenli, daha güvenilir ve ölçeklenebilir otonom sistemler oluşturmak için muhtemelen anahtar bir rol oynayacaktır.
Yapay zeka hakkında daha fazla bilgi edinmek için topluluğumuza ve GitHub depomuza göz atın. Çözüm sayfalarımızda sağlıkta yapay zeka ve üretimde bilgisayarlı görü gibi uygulamaları keşfedin. Lisanslama seçeneklerimizi keşfedin ve bugün inşa etmeye başlayın!






